| 编辑推荐: |
文章主要介绍了软件定义汽车技术路线的SDV的三大技术路线。希望对您有帮助。
本文来自于CSDN,由火龙果软件Linda编辑、推荐。
|
|
软件定义汽车技术路线(新型汽车构架方案)
1、前言
软件定义汽车SDV(Software Define Vehicle)是新一代车辆电子系统体系构架中的核心部分,2000年之前的汽车电子系统构架以及目前主流的汽车的汽车电子构架主要是掌握在零部件厂家手中,包括博世、大陆、联电等。汽车的电子构架是以功能元件为基础加总线的模式EEA:

传统的EEA就是将功能单元电气化,单元与单元之间总线化。功能单元的电气件包括相关的传感器、控制器、驱动器、电气功能件等,总线连接包括Can(FD)、Lin、部分网络或无线连接等。 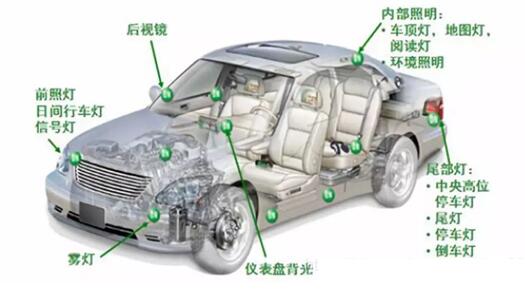
如果我们要对某个车型平台的某个功能进行更改或者升级,只需要针对这个功能模块的电气功能组件和总线通信数据进行升级和变化即可。
老的EEA有一个显著的优势就是汽车组件化、部件化。组件化又很容易形成平台化,所以我们经常说某个平台。或者是多个车型共平台。平台下面有很多的子平台,子平台下面有很多的功能组件。
组件化和平台化的优势在于可以快速的批量化,快速的进行车型的不断以年或周期进行升级。并且这种变化可以在极低成本代价之下来进行。 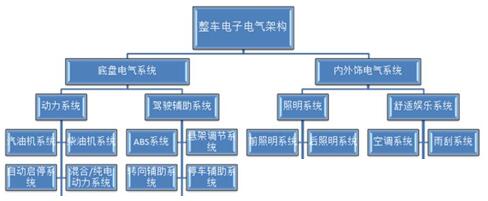
传统的EEA优势虽然很明显,但是他的缺点也很明显,那就是EEA构架是在功能基本定义完成的基础上进行功能组件化。如果功能或者用户需求在不断变化,或者用户自己想定义一部分功能,这种情况下应该怎么办?传统的EEA构架就制约了这种需求。
而恰恰新能源汽车的兴起,造车新势力需要在汽车的驾驶和运载功能之上,创造一种和传统汽车的差异化竞争,就像当年的苹果手机一样,要弯道超车就需要创造一种方式去引导用户。软件定义汽车(SDV)的新的构架就产生了。
什么是软件定义汽车呢?
所谓软件定义汽车就是汽车的功能,整车厂可以通过软件接口或者软件参数进行定义和调整,部分功能,终端用户可以通过参数定义进行功能升级或者个性化调整。
距离而言,例如以前整车厂做一款汽车,需要先进行平台定义,部件选型。现在只需要对参数进行调整,可以定制车灯位置、桥长度、车辆娱乐系统的可视化、车辆刹车(特斯拉的问题)系统等。而用户则可以定义车内灯光的亮度、氛围灯的颜色、车辆交互系统的语音等。这种功能可定义、参数可定义就是软件化的外在表现形式。

2、SDV的三大技术路线
SDV从2000年后逐步发展成型,并且逐步在改变汽车行业的格局。以前老构架的时候汽车零部件厂家掌握了构架的核心,特别是功能核心部件。催生了博世、大陆等世界级的公司,他们定义了大量的标准以便设立大量的排他性“护城河”。
SDV的诞生,彻底改变了这种现状,变成了整车厂的绝对话语权。由于软件的易得性,导致整车厂对软件平台进行需求定义和构架后,可以像互联网行业一样,直接外包给软件公司和硬件公司一样。就像小米在消费电子领域正在做的那样,小米完成生态链定义后,直接完成产品定义,然后软件和硬件直接交给大量的硬件代理设计公司如英伟达完成FDA后,再交给代工厂如富士康进行加工。这将彻底提升整车厂的话语权,但是也改变了行业规则,给互联网或者其他进入者降低了软硬件门槛,但是提高了设计和构架门槛。
从目前的新势力汽车和目前的发展趋势看,当今世界(指点江山)有三种SDV技术方向:
域定义构架模式:以特斯拉为代表的早期进入的企业,保留了部分老构架,重新以功能和通信定义构架,并在娱乐、电控等功能进行软件化和参数化定义。传统车企和部分非互联网行业的新势力造车企业多采用这种模式。
平台场景接口模式:建立汽车平台化操作系统,并将功能应用封装为场景模块,在场景模块下提供功能接口和功能参数。通过参数和接口实现功能,功能支撑场景,场景支撑系统,系统构建汽车。这条路线的典型代表是华为,估计小米也会是这种模式。
平台功能态模式:类似机器人,构建汽车功能态,建立汽车的数据软件平台、传输软件平台、算法平台,并使之在软件层级图形化、模块化和组件化。类似Matlab的组件模型或数字双胞胎模型,类似机器人平台或者功能组态平台。这条路线在日本比较流行,同时在自动驾驶及车辆控制等领域进入汽车行业的相对流行,如百度等。
下面详细介绍三种技术方案:
第一种:域定义构架模式
以特斯拉为首的构架模式,将域控制器的核心发展是芯片的计算能力快速提升,公用信息的系统组件,能在软件中分配和执行,可实现以足够的资源快速响应完成客户需求,具备平台化、兼容性、集成高、性能好等优势。
其构架是分布式的,功能分布,例如将传统汽车功能集中化,分为座舱域、底盘域、娱乐域、刹车系统域。。。。。。域之间通过高速网络总线连接,域内部根据需要可以选择以太网高速总线、也可以选择传统的负Lin、Can总线。
硬件则完全分布化,将功能直接分不到执行部件这一个层次。而域控制器则只做功能的下发、配置、协调和域调度。
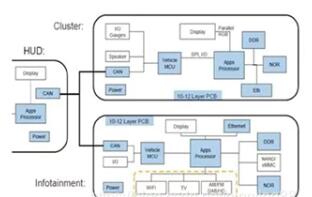
例如上图的驾仓域的分布系统图,通过多种类型的通信方式,将数据标准化接入总线通信,并将部件参数化布置进入域控制器,最终实现车辆定义的软件化。
这种模式的优势是由于与传统构架有共通性,且可以部分利用或者稍加改造就可以利用现有的电子部件产品,快速实现产品构架到产品的量产化。特斯拉是成功的代表,因为特斯拉必须需要量产和批量化,产业化和商业化,不可避免的需要采用这种模式。但是连特斯拉在其规划中也提到“功能域分布不是未来汽车构架的里程碑,是一个过渡”。
第二种:平台场景接口模式
最近我们很高兴的看到华为公开了鸿蒙车辆系统的说明书和接口代码,也让我们看到2008年前后宝马做过的汽车操作系统的构思得以延续,可以有幸看到平台场景接口模式的逐步产业化和商业化。
平台场景接口模式就是类似手机或者互联网云服务的平台系统模式,通过建立层级化的系统构架,建立以功能和数据为核心的功能化系统。包括应用平台系统、支撑平台系统、核心组件系统、硬件支撑系统等。
和特斯拉的域结构不同,前者还是建立在传统汽车电子的构架基础上,结合芯片技术的发展推进的,而建立平台场景接口模式的核心前提是对软件操作系统STOS和软件应用平台SAAS的深入理解,对互联网行业软件定义网络(SDN)、软件描述平台(SDP)技术的深入和延伸。
实际实现过程中,在操作系统之上将功能封装进操作系统,形成车机操作系统,封装的方法有很多,例如利用软件类的方法、利用物模型的方法、利用软组态的方法,这些属于软件方法和工具的问题,与软件语言一样,具有多样性,每个厂家在实现时候的方式是不同的,但是构架是一样的。
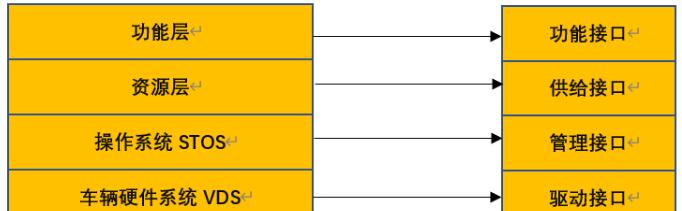
下面是一个典型的平台场景接口模式的例子——华为鸿蒙车机系统的功能层(应用层)的基本功能表和功能接口的例子: 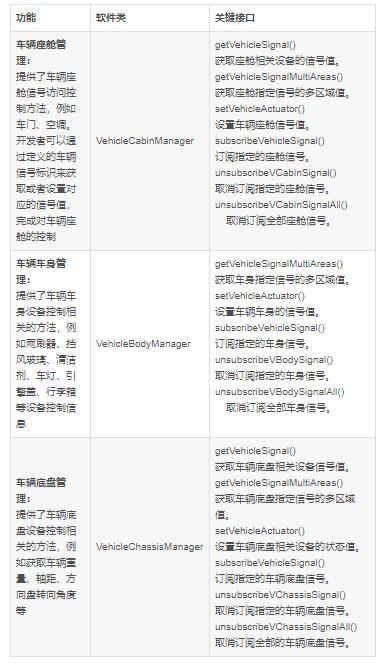
上图是部分功能分类和功能接口。目前处于半开源状态,具体大家可以去查找和自己看(代码有点多,构架需要自己整理,笔者在将来如果有时间,可以把整个功能构架和功能模型整理出来,但是工作量确实巨大)。
第三种:平台功能态模式
现在这种技术路线也还没有一个特定的名字,具体总结来说应该叫平台功能“组态”模式。仔细研究这种开发模式后,笔者翻查了很多行业的平台开发模式,从机器人、CNC行业CODESYS
CNC找到了部分影子。有点类似于Matlab的仿真模型的方式,也有点类似于数字双胞胎的数据模型的方式,其核心是汽车软件化系统开发平台CODESYSTEM
CAR。
由于开放的资料较少,从日本人的网站和中国部分公司的资料推论其大概的框架和描述如下:
平台功能”态”模式是一种利用软件技术,将功能和算法模型化,并将模型“组态”化,并通过数据、功能、算法、通信等等现实世界的东西,全部软件化成组件和模型、数字、参数,并将软件化的东西形成功能“态”、算法库、数字“态”,并使之图形化,这样在汽车实现的时候可以通过编程的方式直接实现,这一点和第二种技术“平台场景接口”的方式是一样的,但是平台功能态模式在实现编程的时候不同,在组件和算法的实现过程中不同,这种技术的编程是一种完全可图形化和模块化的编程,用户只需要像搭积木一样就能够完成一个汽车的开发。
同时模块分层级,模块编程可以组件形成一个新的大模块,大模块又可以组件形成更大的模块。这个过程称之为“态”的组合,姑且叫做“组态”。
通过这种“组态”(什么鬼,日本人是这么叫的,直接用汉字写,都不用翻译!),可以从零实现汽车的完全软件化,并且是自我迭代的,就像是有DNA以后,从一个细胞开始,逐步逐步长大成人——听着有点恐怖。
有点难懂,我们用两个例子来说明:
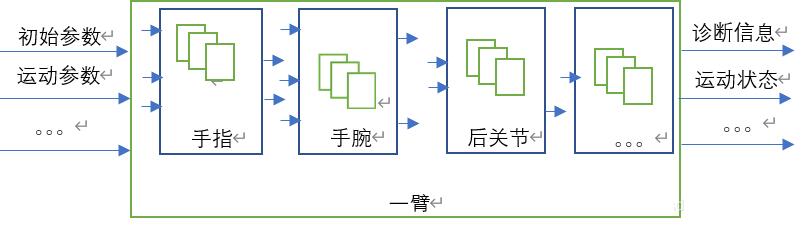
第一个例子是机器人,如果我们要定义和设计一款3节刚性臂的抓取机器人,我们首先设计基本的输入、输出、变量定义等等基础的量,设计PID、运动、模糊等基础算法,再设计各种手指关节的控制算法,包括移动、转动、停止等各种算法,并再构建手指关节软件模型。
一个手指关节设计完成后,根据不同的输入参数,直接Copy形成一根手指的各个关节,这个手指的模型又包括输入和输出,以及控制算法。
一个手指模型设计完成后,根据不同的输入参数,直接Copy形成一只手的五个手指模型,模型也包括自己的输入输出和控制算法。
以此类推再设计手腕、再设计臂、再设计后关节等。
可以发现这种方法会越来越简单,前面完成的可以复用在后面的设计中,并且设计完成一个手臂后,可以直接复制到其他手臂,只是更改以下输入输出和算法参数即可。所有的算法是可以随时修改和迭代的。
有了迭代就体现了恐怖性。
下面是详细典型的例子:
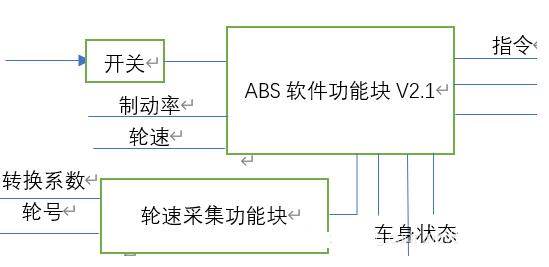
平台功能态模式就是通过具有一定标准的统一图形化语言或者模型化的语言,进行不断的模块定义和组合,形成软件迭代和功能迭代,完全实现功能的软件化。其核心是需要构建和开发一套软件平台,集合算法的迭代开发、基本算法库、可图形化的开发系统平台,汽车专用部件库、数字化信息交换等的基础软件元件。
3、后记
前面论述了汽车软件化SDV的当前的三种技术路线,域定义模式作为传统构架到功能可定义的构架的过度,受多核CPU即芯片技术的快速发展,是近几年研究较多的方案,并能够快速借用现有零部件或者稍加改造,并在娱乐系统和智能座舱快速实现,特别是新能源汽车的发展,催生了这种模式的快速量产化。
场景接口模式是在芯片在供给的时候无法快速满足,或者芯片的技术无法跟上汽车软件化的步伐情况下,通过软件场景的模块化和接口化,实现汽车操作系统,并以此为基础,构建基于场景的可快速开发的汽车软件系统。通过软件系统的不断优化,这种软件系统是可以在不需要太高的芯片或者极高算力基础上快速实现。
平台功能态更适合敏捷而快速的开发,一套设计平台,通过不断的迭代,可以从无到有逐步实现越来越复杂的产品设计,搭积木,一步步实现,未来的空间站就是这样通过“态”的组合快速设计的(NASA
2050 Realizable Space Station Model For Future)。关键是可以自我迭代,例如同一个手指模型,可以通过参数和算法的小变更,组态成成为手臂的模型,一个手臂的模型,通过迭代可以组态成机器人的腿、个体人。通过人的模型,组态成多人协作的模型,通过多人协作模型,组态成工厂作业模型。
|







 订阅
订阅