| 编辑推荐: |
本文主要介绍了中央计算的软件定义汽车架构设计方案解析相关内容。希望对你的学习有帮助。
本文来自于电子发烧友,由火龙果软件Linda编辑,推荐。 |
|
软件定义汽车离不开未来的中央计算架构,二者是相辅相成的。
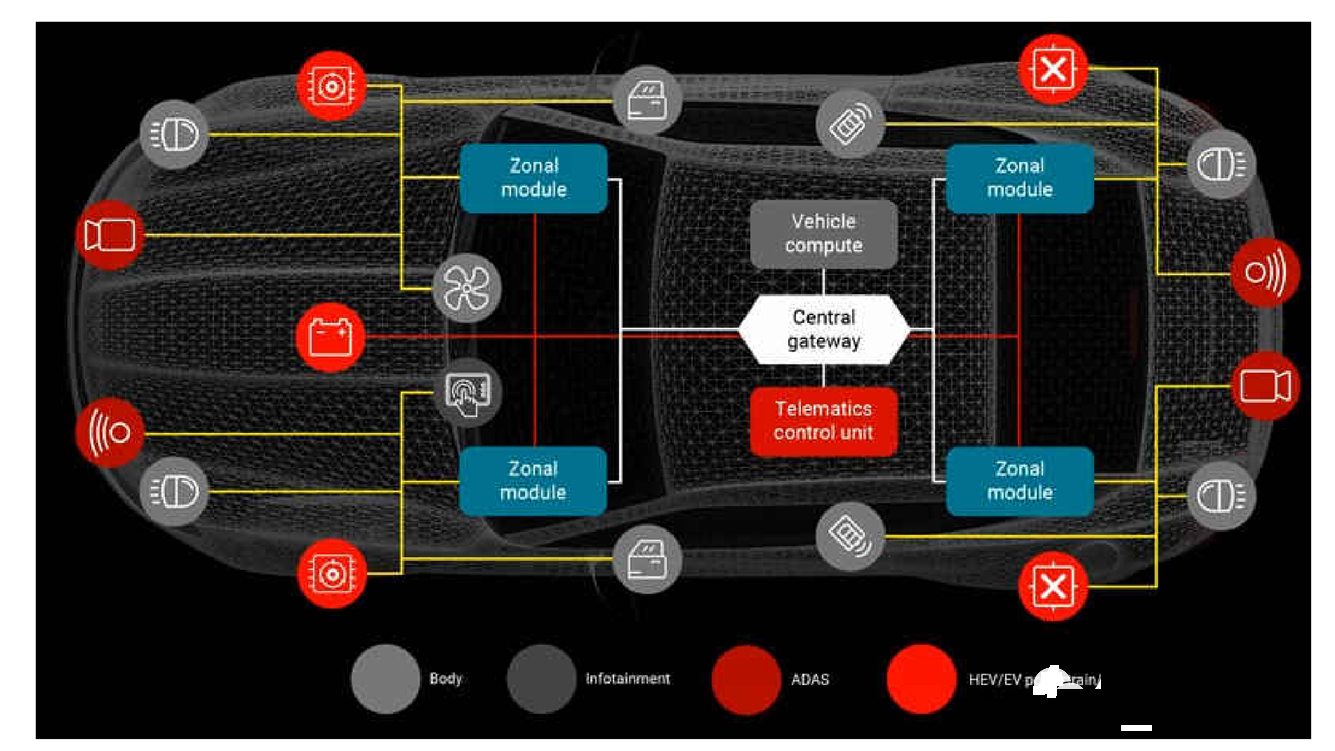
上图是德州仪器构思的中央计算架构,笔者设计了一个车辆中央计算架构,对于车辆计算中心选择两片英伟达的Orin,一片侧重于ADAS,命名为Orin
A,一片侧重于座舱,命名为Orin B。
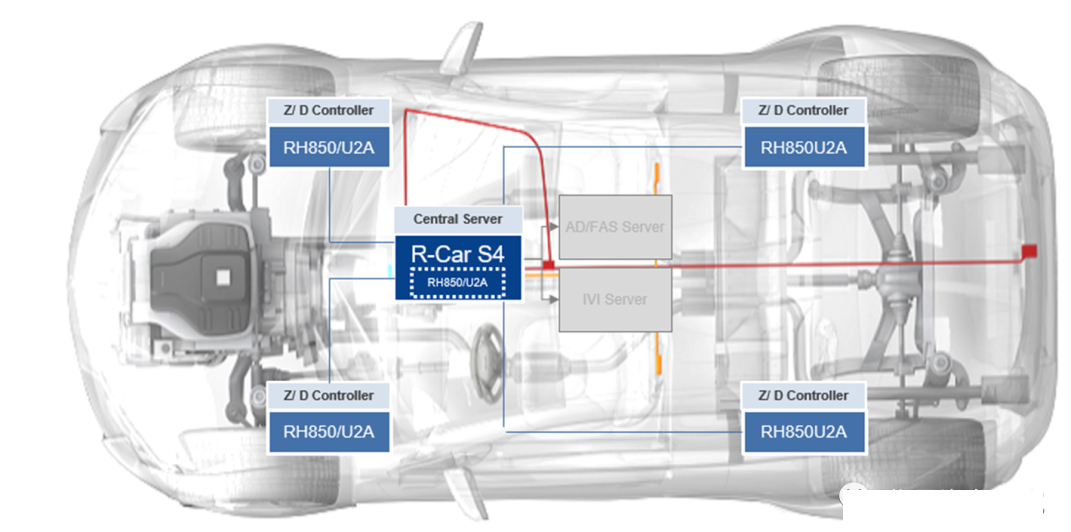
上图是瑞萨的中央计算架构,因为瑞萨没有最擅长的MCU,所以只画出了MCU和中央计算中心(服务器)也就是包含了AD/FAS智能驾驶服务器和IVI座舱服务器。对于Zonal模块,就是传感器、致动器加网关,交换机加MCU实际就是网关。对于那些主要是CAN网络的部分,交换机就不需要了,CAN网络没那么复杂,以太网网络的部分则需要以太网交换机。
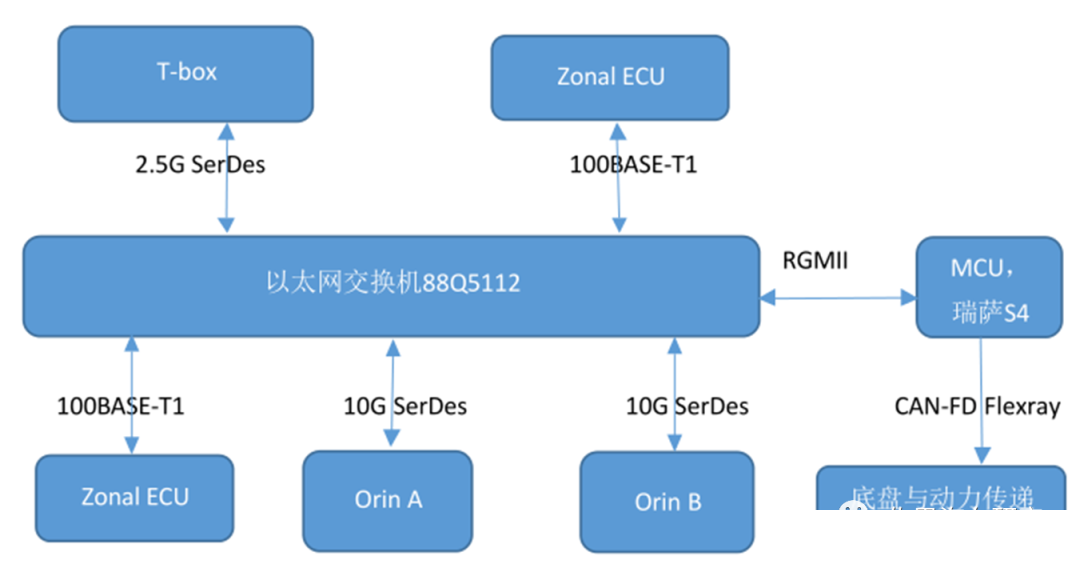
以太网交换机选择Marvell最新的第三代符合功能安全的汽车以太网交换机88Q5112,这是一个9口以太网交换机。内部集成了6个物理层,包括3个100/10BASE-T1(S),两个1000/100BASE-T1,一个100BASE-T1/TX。可以对应5个Zonal
ECU外加一个诊断OBD。诊断OBD用1000Base-T1。目前除了智能驾驶和座舱,都用不到100Mbps的带宽,Zonal主要还是车身和舒适性网络。底盘和动力传递用CAN、CAN-FD或Flexray足够了。
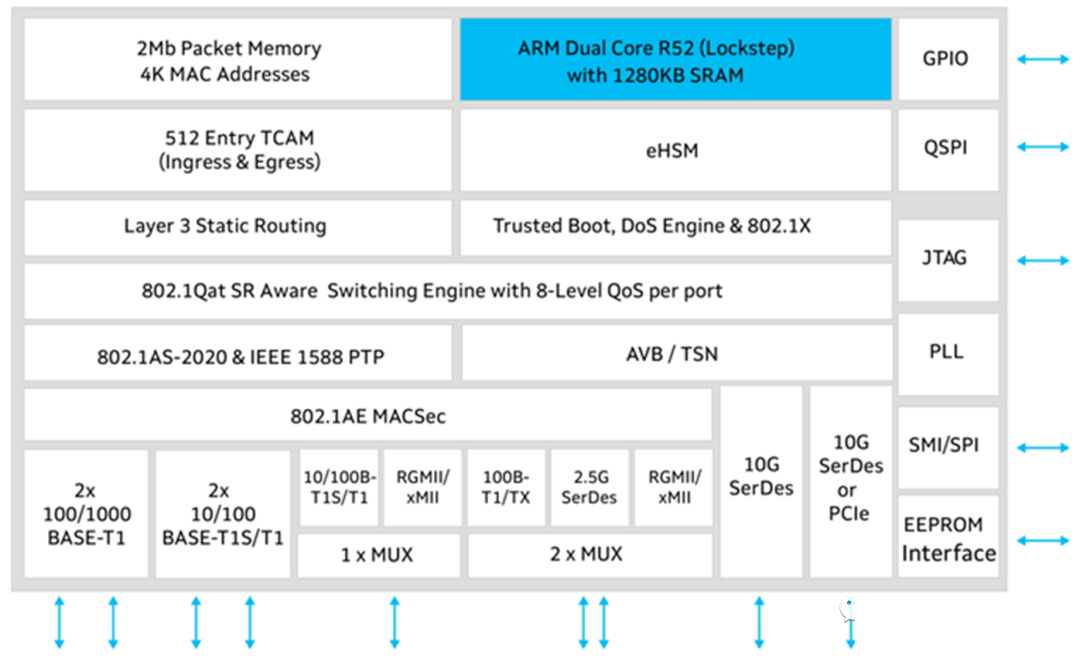
上图是88Q5112内部框架图,对TSN支持比较丰富,包括802.1AS-2020,802.1Qat/
Qav / Qbu / Qbv / Qci / Qcr,还有确保安全性的802.1CB。
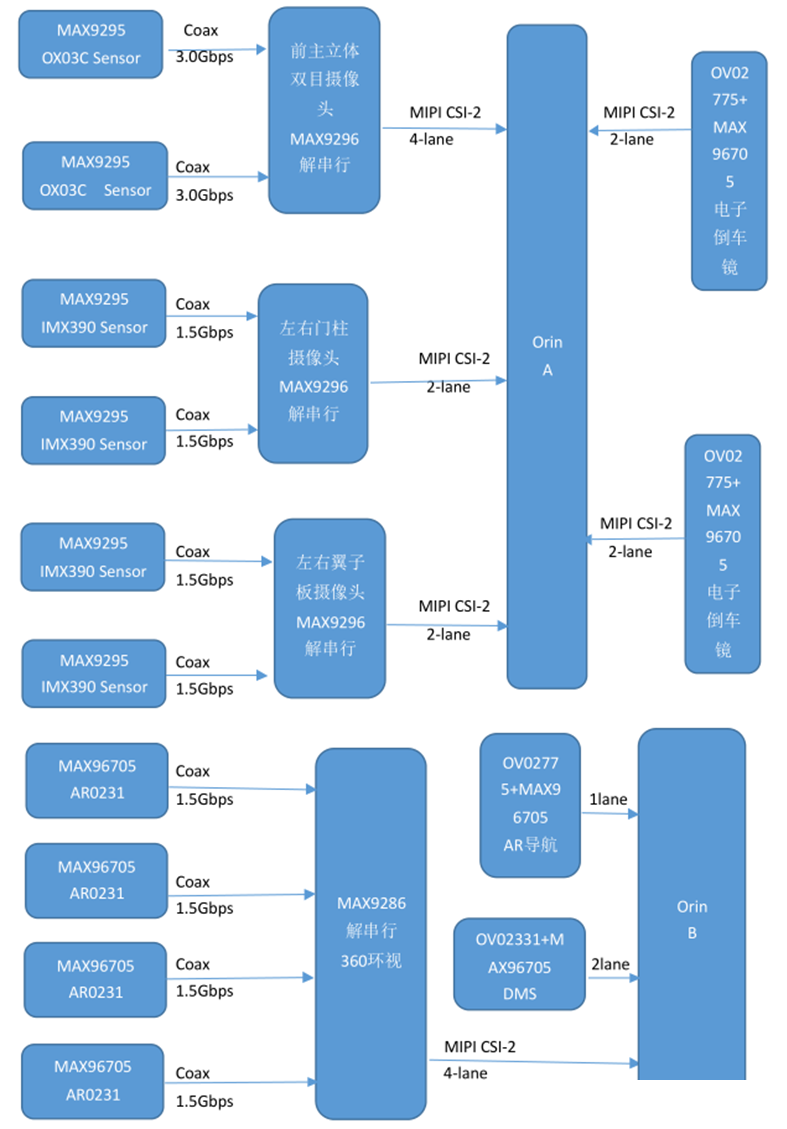
上图为两颗Orin的摄像头输入图,Orin最多输入16lane MIPI
CSI-2,此外还有C-PHY和D-PHY做虚拟通道,800万像素需要占用4lane,低于200万像素1lane即可,超过200万就需要2lane,保险起见,200万像素用2lane,所有传感器型号仅供参考。智能驾驶部分,前主摄像头可以用三颗250万像素摄像头对应短中远三个距离,或者用一颗800万像素,或者用两颗250万像素做立体双目。其余4-6颗都用250万像素或200万像素摄像头,目前对应200万像素以上的解串行芯片只有ADI的MAX9296,加串行是MAX9295,完全垄断市场。MAX9296有1.5G、3G、6G三档可调,最高可对应1600万像素输入。
电子倒车镜又叫Camera Monitor System或E-mirror,就是用屏幕代替倒车镜,也需要两路视频输入,由于显示屏小,100万像素分辨率就已足够了,这个显示屏可以添加ADAS功能,因此归到ADAS系统里。
座舱领域视频输入主要有360环视、AR导航和驾驶员监测DMS。360环视采用比较先进的200万像素摄像头,4合一输出到MAX9286。AR导航也不需要太高分辨率,130万像素就足够。DMS目前有朝高分辨率方向发展,还有导入ToF摄像头的趋势,这里暂定200万像素。
摄像头数据也可以用以太网传输,RAW10格式30fps下的200万像素摄像头码率大约是0.6Gbps,如果是RGB888格式,码率大约1.44Gbps,800万像素码率大约5.7Gbps,目前最高有对应10Gbps的以太网物理层芯片,传输800万像素完全不成问题。高分辨率摄像头一般都是RAW8或RAW10格式输出,低分辨率一般是YUV422格式输出。以太网传输的好处是可以用单对非屏蔽双绞线即可,MIPI
CSI-2是需要同轴电缆传输。以太网连接器的成本也要明显低于MIPI CSI-2的连接器。以太网也方便用TSN做数据整形、流量控制等动作,连接以太网交换机路由的方式交换通信也比MIPI
CSI-2更加灵活。以太网物理层芯片的成本也低于解串行芯片的成本,但高于加串行芯片的成本。以太网的缺点是调试异常复杂,调试设备价格非常昂贵,大多数工程师都不熟悉以太网的调试。
以太网也可以桥接摄像头,如Marvell的88QB5224。
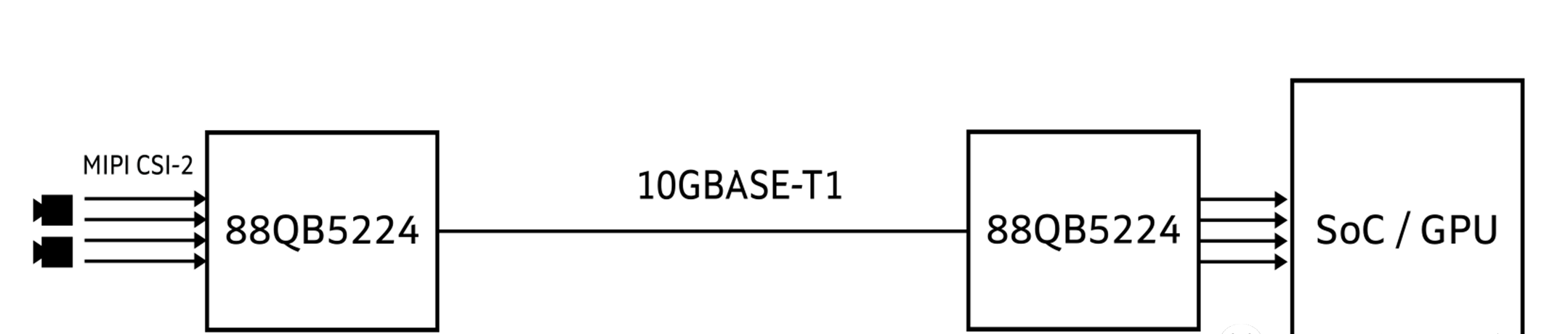
如果SoC的MIPICSI-2接口用完了,但仍然必须接入摄像头,这时就可以考虑以太网桥接,如上图。88QB5224支持IEEE802.3ch标准,最高支持10G,接入4个200万或250万像素摄像头是没有问题的。
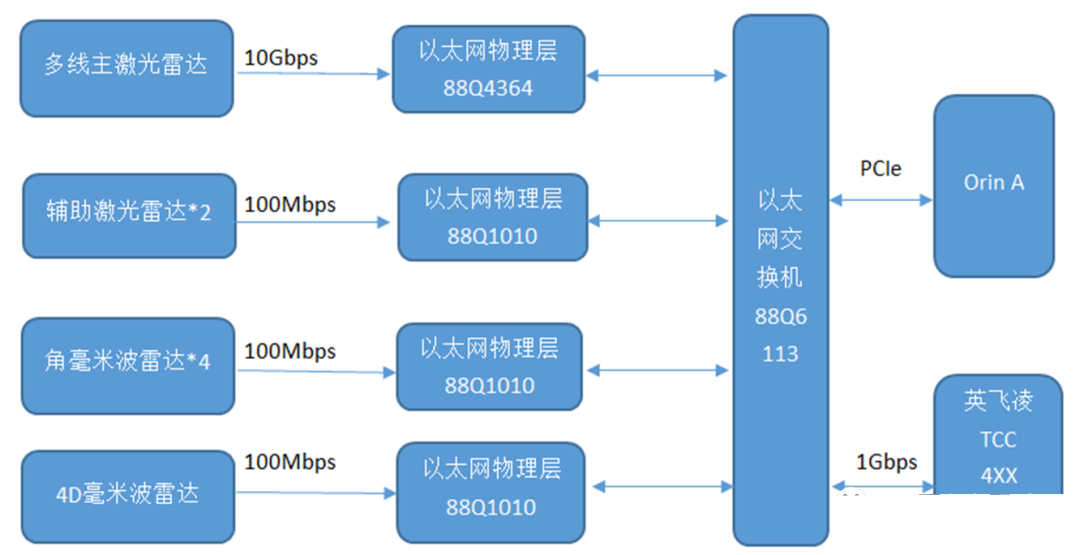
上图是激光雷达与毫米波雷达传感器输入簇。
激光雷达可能需要1-3个,1个主激光雷达,考虑到激光雷达技术进步,因此预留了足够的带宽余地,最高支持10Gbps,也就是相当于1200万像素摄像头的分辨率,当然激光雷达是3D的。目前任何类型的激光雷达1Gbps的带宽就足够。辅助激光雷达通常是补盲,分辨率很低,100Mbps的带宽就足够,角雷达一般是毫米波雷达,目前多用CAN-FD输出,不过Orin要支持CAN-FD会比较麻烦,所以就也用以太网,角雷达一般也支持以太网输出,通常带宽10Mbps就足够。4D毫米波雷达输出数据量大,用100Mbps带宽也足够。最后的控制底盘的MCU选择英飞凌最新的TCC4XX系列,带宽1Gbps足够。
Marvell的88Q4364,它和博通的BCM8989X是目前唯二支持10G
车载以太网的物理层芯片。

88Q6113是Marvell最新的第三代11口以太网交换机。
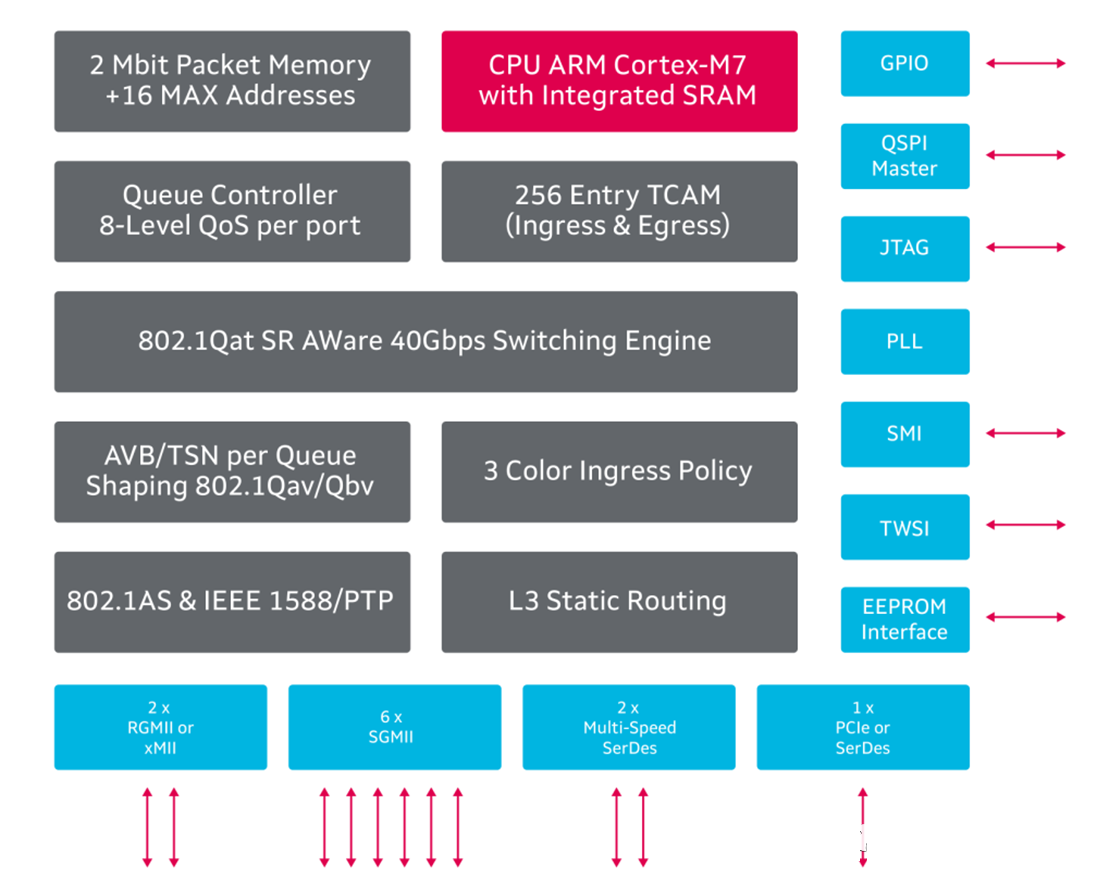
上图是88Q6113内部框架图,TSN方面支持802.1Qav/Qbv、802.1Qat、802.1AS。
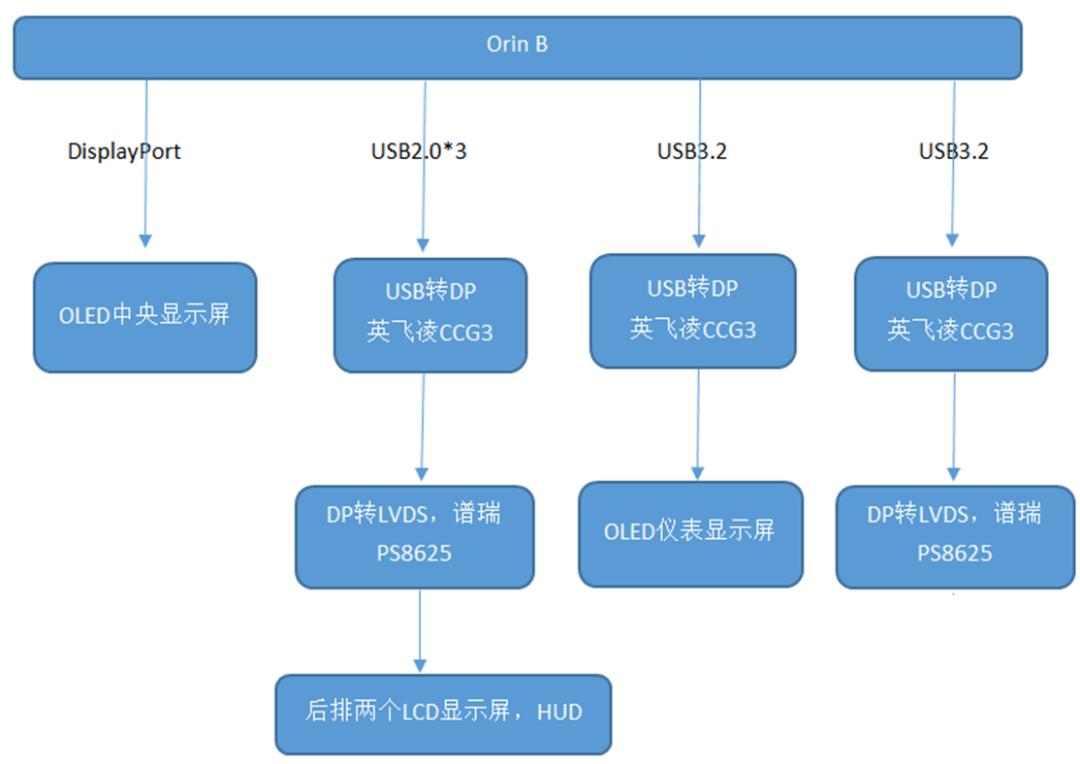
上图为Orin B的视频输出簇,Orin的显示输出只有一个就是DisplayPort(DP)
1.4a,也可以配置成HDMI输出或eDP输出,不过Orin有多达7个USB输出,包括3个USB3.2和4个USB2.0,USB和DisplayPort是可以轻松转换的,再将DisplayPort转换为其他格式,目前高分辨率显示屏基本都采用DP或eDP输入,不过车载领域主要还是LVDS,发展方向是eDP输入,如目前的2K或4K车载OLED屏就是如此。这就省了不少格式转换,DP也可以转换为LVDS,如谱瑞的PS8625,最高带宽2.7Gbps,最高分辨率1920*1200,顺便说一下这就是特斯拉用的芯片。USB2.0的带宽比较低,只能做后排的小屏,分辨率大概1280*720的水平,做AR-HUD也是足够的。USB3.2是足以支持2K分辨率的。以Orin强大的GPU能力,输出5个2K屏显示应该还是比较轻松的。Orin
A也需要3路视频输出,一路传输到中央显示屏CID,可以手动切换信号源,用Orin A的DP输出,另外两路就是电子倒车镜,用Orin的USB3.2输出,转换为LVDS即可。
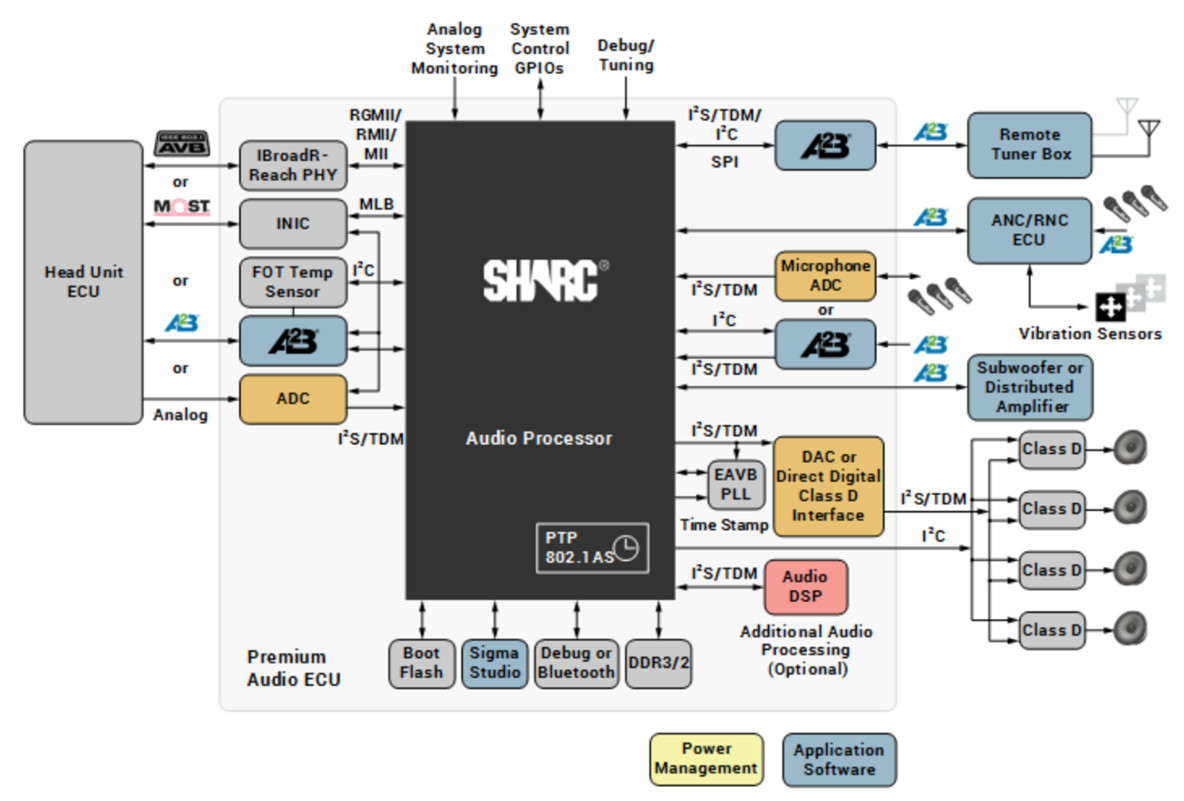
座舱的音频部分可以参考ADI的设计,这是顶级座舱音频,还包含了主动车内降噪和路面降噪,音质要好的一个重要前提就是车内噪音要低。HeadUnit就是Orin
B,老旧的MOST总线需要使用光纤,非常麻烦,已经被时代遗弃了。图上还少了一个到T-Box做E-Call的分支。
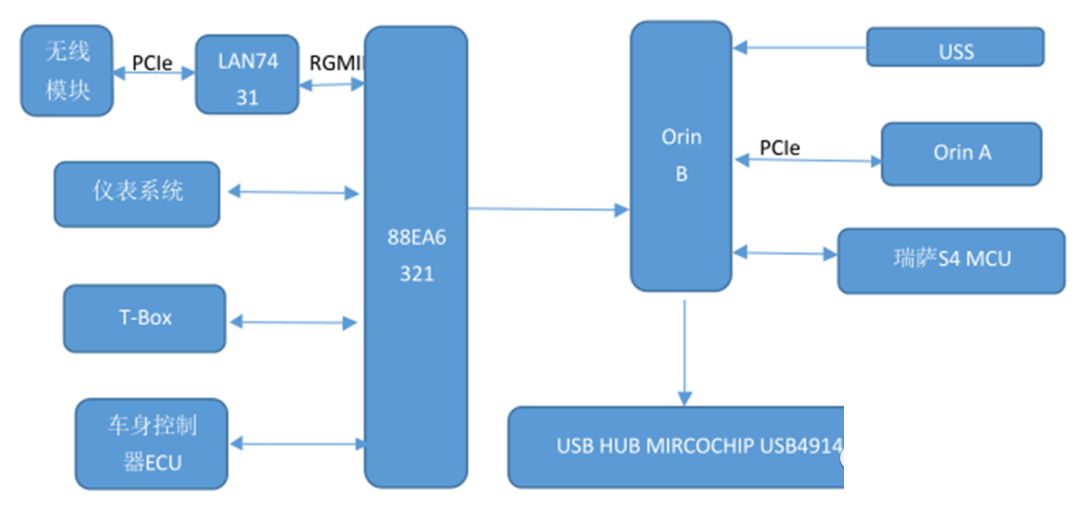
上图是座舱部分的外设,一般来说SoC的PCIe端口接蓝牙与WiFi无线模块的PCIe,不过两个Orin会占用最高等级的PCIe,此外板对板有时候也用PCIe连接,因此多设计一个PCIe转以太网的MICROCHIP的LAN7431,以太网交换机选7口的88EA6321,Orin的USB接口被占用不少,因此需要添加一个USB
HUB,选MICROCHIP的USB4914,座舱的MCU还是选择瑞萨的S4或传统的RH850。USS是超声波传感器,超声波传感器一般使用DSI3总线连接,1主11从。超声波传感器系统与Orin连接可以用UART+SPI,这是比较麻烦的。
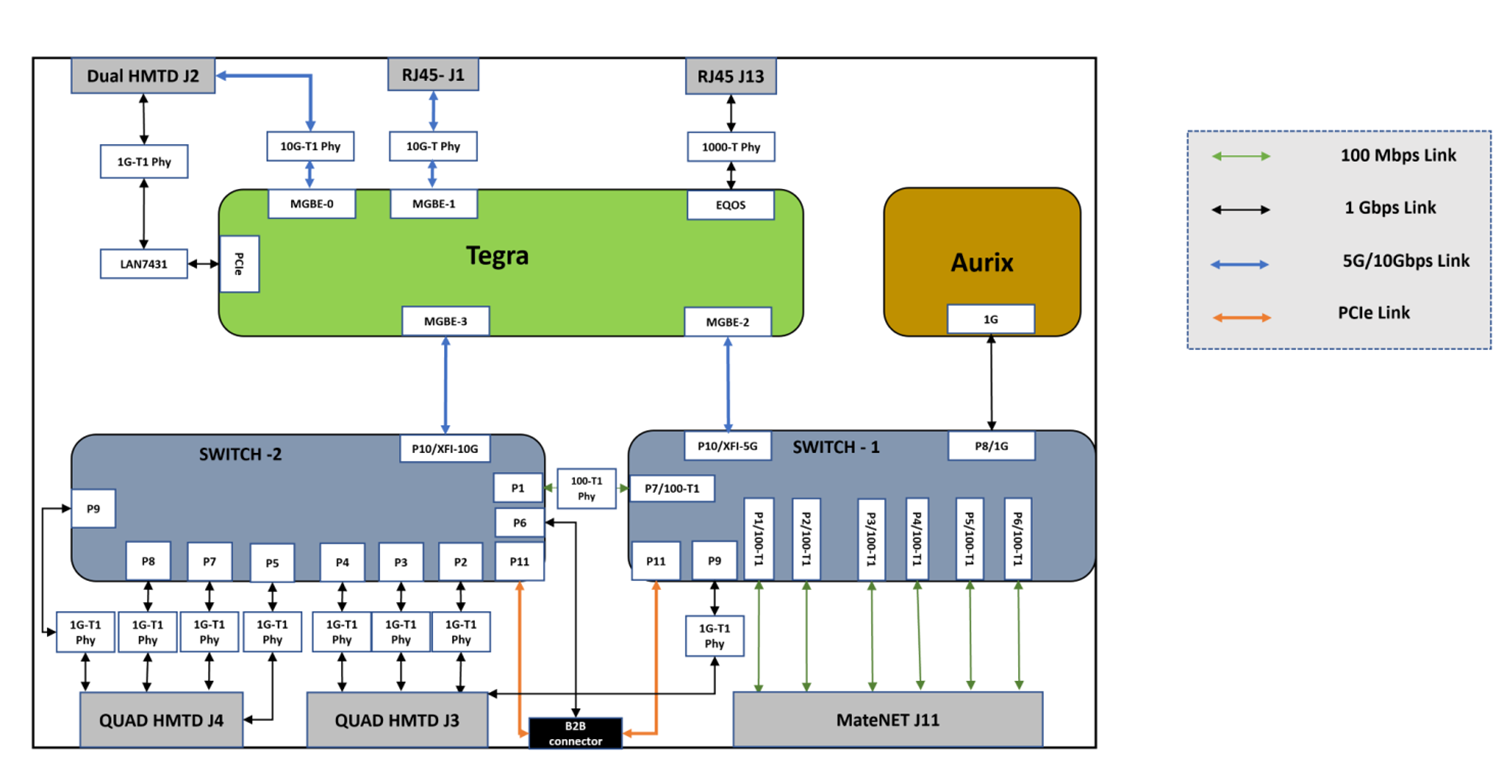
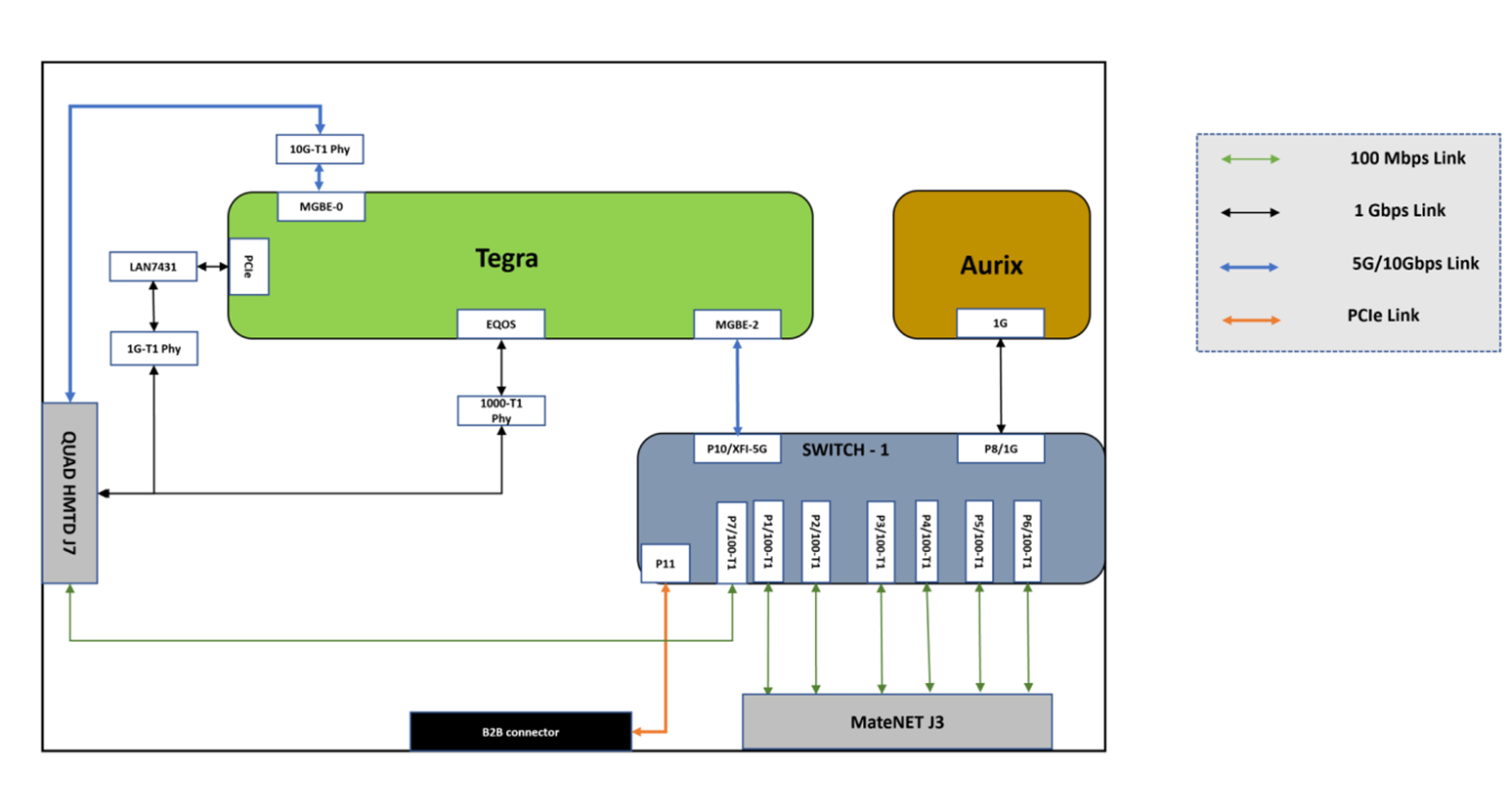
NVIDIA DRIVE 6.0的网络拓扑Safety模式
最后放上英伟达最新自动驾驶系统DRIVE 6.0的网络拓扑图以供参考。DRIVE
6.0的网络拓扑有两种,一种是BASE,另一种是Safety,上图就是Safety模式。Safety模式下以太网交换机的CPU被绕开,所以不支持OTA。同时最大MTU尺寸从16k减少到1500byte。这里的Tegra就是Orin,Aurix是英飞凌TC397T。这里的以太网交换机1是Marvell的88Q5072,以太网交换机2是88Q6113。LAN7431是Mircochip的PCIe转以太网的芯片。Safety模式为了安全,牺牲了一些交换机性能,因此多加了一个高等级以太网交换机88Q6113,实际一个88Q5072就足够。
NVIDIA DRIVE 6.0的网络拓扑Base模式
这是DRIVE6.0的网络拓扑Base模式,以太网交换机是88Q5072。Orin有两条10Gbps线路,一条连接以太网交换机,另一条就是连接到中央网关,也就是车内骨干以太网的线路。
英伟达还特别提到车载以太网TSN标准的API,包括了时间同步的802.1AS(gPTP),序列与流量整形有802.1Qav,
802.1Qbv, 802.1Qbu/802.3br,802.1CB 和802.1Qci,失效容忍的802.1Qat和802.1Qcc。
未来的中央计算架构也有点像PC机,所有的数据处理都靠一颗CPU,基础中间件AUTOSAR和在此之上的Linux、QNX、Android等操作系统构成了类似Windows的系统,对绝大多数的程序员来说,它基本是透明的,程序员只是设计应用软件。这才是真正的软件定义汽车。
|







 订阅
订阅