| БрМЭЦМі: |
БОЮФжївЊНщЩмСЫвЛЬзБпдЕМьВтЕФРэТлЃЌЗжНзЖЮЕФНтЪЭШчКЮЪЕЯжБпдЕМьВтЃЌЯЃЭћЖдФњЕФбЇЯАгаЫљАяжњЁЃ
БОЮФРДздгкМђЪщЃЌгЩЛ№СњЙћШэМўAliceБрМЃЌЭЦМіЁЃ |
|
Canny БпдЕМьВтЫуЗЈгЩМЦЫуЛњПЦбЇМв John F. Canny
гк 1986 ФъЬсГіЕФЁЃЦфВЛНіЬсЙЉСЫЫуЗЈЃЌЛЙДјРДСЫвЛЬзБпдЕМьВтЕФРэТлЃЌЗжНзЖЮЕФНтЪЭШчКЮЪЕЯжБпдЕМьВтЁЃCanny
МьВтЫуЗЈАќКЌЯТУцМИИіНзЖЮЃК
1.ЛвЖШЛЏ
2.ИпЫЙФЃК§
3.МЦЫуЭМЦЌЬнЖШЗљжЕ
4.ЗЧМЋДѓжЕвжжЦ
5.ЫЋуажЕбЁШЁ
ЛвЖШЛЏ
ЛвЖШЛЏЪЕМЪЩЯЪЧвЛжжНЕЮЌЕФВйзїЃЌПЩвдМѕЩйМЦЫуЁЃШчЙћЫуЗЈВЛНјааЩЋВЪЯрЙиЕФЪЖБ№ЕФЛАЃЌВЛЛвЖШЛЏЃЌвВПЩвджБНгНјааКѓУцЕФНзЖЮЁЃ
# ЛвЖШЛЏ
def gray(self, img_path):
"""
МЦЫуЙЋЪНЃК
Gray(i,j) = [R(i,j) + G(i,j) + B(i,j)] / 3
or :
Gray(i,j) = 0.299 * R(i,j) + 0.587 * G(i,j) +
0.114 * B(i,j)
"""
# ЖСШЁЭМЦЌ
img = plt.imread(img_path)
# BGR зЊЛЛГЩ RGB ИёЪН
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# ЛвЖШЛЏ
img_gray = np.dot(img_rgb[...,:3], [0.299, 0.587,
0.114])
return img_gray |
ИпЫЙФЃК§
дкЪЕМЪЕФЭМЦЌжаЃЌЖМЛсАќКЌдыЩљЁЃЕЋгаЪБКђЃЌЭМЦЌжаЕФдыЩљЛсЕМжТЭМЦЌжаБпдЕаХЯЂЕФЯћЪЇЁЃЖдДЫЕФНтОіЗНАИОЭЪЧЪЙгУИпЫЙЦНЛЌРДМѕЩйдыЩљЃЌМДНјааИпЫЙФЃК§ВйзїЁЃИУВйзїЪЧвЛжжТЫВЈВйзїЃЌгыИпЫЙЗжВМгаЙиЃЌЯТУцЪЧвЛИіЖўЮЌЕФИпЫЙКЏЪ§ЃЌЦфжа
(x, y) ЮЊзјБъЃЌІв ЮЊБъзМВюЃК
НјааИпЫЙТЫВЈжЎЧАЃЌашвЊЯШЕУЕНвЛИіИпЫЙТЫВЈЦїЃЈkernelЃЉЁЃШчКЮЕУЕНвЛИіИпЫЙТЫВЈЦїЃПЦфЪЕОЭЪЧНЋИпЫЙКЏЪ§РыЩЂЛЏЃЌНЋТЫВЈЦїжаЖдгІЕФКсзнзјБъЫїв§ДњШыИпЫЙКЏЪ§ЃЌМДПЩЕУЕНЖдгІЕФжЕЁЃВЛЭЌГпДчЕФТЫВЈЦїЃЌЕУЕНЕФжЕвВВЛЭЌЃЌЯТУцЪЧ
(2k+1)x(2k+1) ТЫВЈЦїЕФМЦЫуЙЋЪН :
ГЃгУГпДчЮЊ 5x5ЃЌІв=1.4 ЕФИпЫЙТЫВЈЦїЁЃЯТУцЪЧ 5x5 ИпЫЙТЫВЈЦїЕФЪЕЯжДњТыЃК
# ШЅГ§дывє - ЪЙгУ 5x5
ЕФИпЫЙТЫВЈЦї
def smooth(self, img_gray):
# ЩњГЩИпЫЙТЫВЈЦї
"""
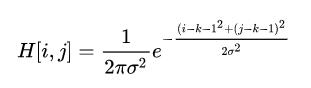
вЊЩњГЩвЛИі (2k+1)x(2k+1) ЕФИпЫЙТЫВЈЦїЃЌТЫВЈЦїЕФИїИідЊЫиМЦЫуЙЋЪНШчЯТЃК
H[i, j] = (1/(2*pi*sigma**2))*exp(-1/2*sigma**2((i-k-1)**2
+ (j-k-1)**2))
"""
sigma1 = sigma2 = 1.4
gau_sum = 0
gaussian = np.zeros([5, 5])
for i in range(5):
for j in range(5):
gaussian[i, j] = math.exp((-1/(2*sigma1*sigma2))*(np.square(i-3)
+ np.square(j-3)))/(2*math.pi*sigma1*sigma2)
gau_sum = gau_sum + gaussian[i, j]
# ЙщвЛЛЏДІРэ
gaussian = gaussian / gau_sum
# ИпЫЙТЫВЈ
W, H = img_gray.shape
new_gray = np.zeros([W-5, H-5])
for i in range(W-5):
for j in range(H-5):
new_gray[i, j] = np.sum(img_gray[i:i+5, j:j+5]
* gaussian)
return new_gray |
ЭМЦЌЬнЖШЗљжЕ
БпдЕЪЧЭМЯёЧПЖШПьЫйБфЛЏЕФЕиЗНЃЌПЩвдЭЈЙ§ЭМЯёЬнЖШЗљжЕЃЌМДМЦЫуЭМЯёЧПЖШЕФвЛНзЕМЪ§РДЪЖБ№етаЉЕиЗНЁЃгЩгкЭМЦЌЪЧРыЩЂЕФЃЌПЩвдгУгаЯоЕМЪ§РДНќЫЦЭМЦЌЕФЬнЖШЃК
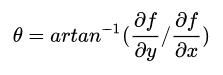
ЭМЦЌЬнЖШЗљжЕЮЊЃК
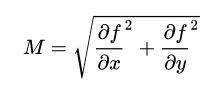
ЬнЖШЗНЯђЮЊЃК
ЪЕЯжДњТыШчЯТЃК
# МЦЫуЬнЖШЗљжЕ
def gradients(self, new_gray):
"""
:type: image which after smooth
:rtype:
dx: gradient in the x direction
dy: gradient in the y direction
M: gradient magnitude
theta: gradient direction
"""
W, H = new_gray.shape
dx = np.zeros([W-1, H-1])
dy = np.zeros([W-1, H-1])
M = np.zeros([W-1, H-1])
theta = np.zeros([W-1, H-1])
for i in range(W-1):
for j in range(H-1):
dx[i, j] = new_gray[i+1, j] - new_gray[i, j]
dy[i, j] = new_gray[i, j+1] - new_gray[i, j]
# ЭМЯёЬнЖШЗљжЕзїЮЊЭМЯёЧПЖШжЕ
M[i, j] = np.sqrt(np.square(dx[i, j]) + np.square(dy[i,
j]))
# МЦЫу ІШ - artan(dx/dy)
theta[i, j] = math.atan(dx[i, j] / (dy[i, j] +
0.000000001))
return dx, dy, M, theta |
ЗЧМЋДѓжЕвжжЦЃЈNMSЃЉ
РэЯыЧщПіЯТЃЌзюжеЕУЕНЕФБпдЕгІИУЪЧКмЯИЕФЁЃвђДЫЃЌашвЊжДааЗЧМЋДѓжЕвжжЦвдЪЙБпдЕБфЯИЁЃдРэКмМђЕЅЃКБщРњЬнЖШОиеѓЩЯЕФЫљгаЕуЃЌВЂБЃСєБпдЕЗНЯђЩЯОпгаМЋДѓжЕЕФЯёЫиЁЃ
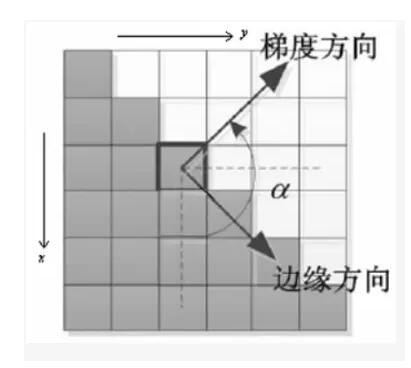
ЬнЖШЗНЯђгыБпдЕЗНЯђЯрЛЅДЙжБ
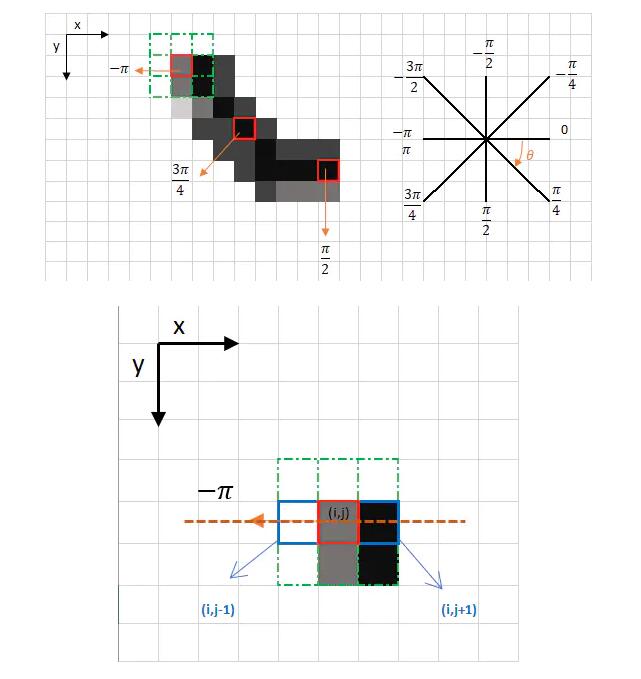
ЯТУцЫЕЫЕ NMS ЕФЯИНкФкШнЁЃNMS дк 4 ИіЗНЯђЩЯНјааЃЌЗжБ№ЪЧ
0ЃЌ90ЃЌ45ЃЌ135ЃЌУЛгаНЧЖШАќКЌСНИіСьгђЃЌвђДЫЃЌвЛЙВгУАЫИіСьгђЃКЩЯЃЌЯТЃЌзѓЃЌгвЃЌзѓЩЯЃЌзѓЯТЃЌгвЩЯЃЌгвЯТЃЌШчЯТЭМЫљЪОЃЌC
жмЮЇЕФ 8 ИіЕуОЭЪЧЦфИННќЕФАЫИіСьгђЁЃ
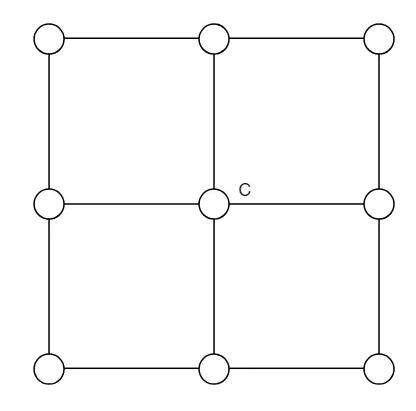
етбљзіЕФКУДІЪЧМђЕЅЃЌ ЕЋЪЧетжжМђЛЏЕФЗНЗЈЮоЗЈДяЕНзюКУЕФаЇЙћЃЌ вђЮЊЃЌздШЛЭМЯёжаЕФБпдЕЬнЖШЗНЯђВЛвЛЖЈЪЧбизХетЫФИіЗНЯђЕФЁЃвђДЫЃЌОЭгаКмДѓЕФБивЊНјааВхжЕЃЌевГідквЛИіЯёЫиЕуЩЯзюФмЮЧКЯЦфЫљдкЬнЖШЗНЯђЕФСНВрЕФЯёЫижЕЁЃ
NMS ЪЧвЊевГіОжВПзюДѓжЕЃЌвђДЫЃЌашвЊНЋЕБЧАЕФЯёЫиЕФЬнЖШЃЌгыЦфЫћЗНЯђНјааБШНЯЁЃШчЯТЭМЫљЪОЃЌg1ЃЌg2ЃЌg3ЃЌg4
ЗжБ№ЪЧ C АЫИіСьгђжаЕФ 4 ИіЕуЃЌРЖЯпЪЧ C ЕФЬнЖШЗНЯђЁЃШчЙћ C ЪЧОжВПзюДѓжЕЕФЛАЃЌC ЕуЕФЬнЖШЗљжЕОЭвЊДѓгкЬнЖШЗНЯђжБЯпгы
g1g2ЃЌg4g3 СНИіНЛЕуЕФЬнЖШЗљжЕЃЌМДДѓгкЕу dTemp1 КЭ dTemp2 ЕФЬнЖШЗљжЕЁЃЩЯУцЬсЕНетжжЗНЗЈЮоЗЈДяЕНзюКУЕФаЇЙћЃЌвђЮЊ
dTemp1 КЭ dTemp2 ВЛЪЧећЯёЫиЃЌЖјЪЧбЧЯёЫиЁЃбЧЯёЫиЕФвтЫМОЭЪЧдкСНИіЮяРэЯёЫижЎМфЛЙгаЯёЫиЁЃ
ФЧУДЃЌбЧЯёЫиЕФЬнЖШЗљжЕдѕУДЧѓЃППЩвдЪЙгУЯпадВхжЕЕФЗНЗЈЃЌМЦЫу dTemp1 дк g1ЃЌg2 жЎМфЕФШЈжиЃЌОЭПЩвдЕУЕНЦфЬнЖШЗљжЕЁЃМЦЫуЙЋЪНШчЯТЃК
weight = |gx|
/ |gy| or |gy| / |gx|
dTemp1 = weight*g1 + (1-weight)*g2
dTemp2 = weight*g3 + (1-weight)*g4 |
ЯТУцСНЗљЭМЪЧ y ЗНЯђЬнЖШжЕБШНЯДѓЕФЧщПіЃЌМДЬнЖШЗНЯђППНќ y жсЁЃЫљвдЃЌg2
КЭ g4 дк C ЕФЩЯЯТЮЛжУЃЌДЫЪБ weight = |gy| / |gx| ЁЃзѓБпЕФЭМЪЧ xЃЌy
ЗНЯђЬнЖШЗћКХЯрЭЌЕФЧщПіЃЌгвБпЪЧ xЃЌy ЗНЯђЬнЖШЗћКХЯрЗДЕФЧщПіЁЃ
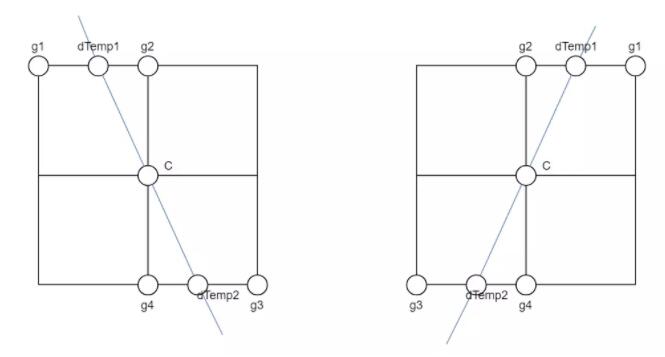
ЖдгкзѓБпЕФЭМРДЫЕЃЌвд C ЕуЮЊЕБЧАЮЛжУ - d[i, j] ЃЌФЧУД
g2 дк C ЕФЧАвЛааЃЌg4 дк C ЕФКѓвЛааЃЌЫљвдЮЛжУзјБъЪЧЃК<br />g2 = d[i-1,
j]ЃЛg4 = d[i+1, j]ЁЃИљОнзѓЭМЕФЮЛжУЙиЯЕПЩвдЕУЕНЃКg1 = d[i-1, j-1]ЃЛg3
= d[i+1, j+1]ЁЃ
ЭЌРэЃЌИљОнгвЭМЕФЮЛжУЙиЯЕПЩвдЕУЕНЃКg1 = d[i-1, j+1]ЃЛg3 = d[i+1, j-1]ЁЃ
ЯТУцСНЗљЭМЪЧ x ЗНЯђЬнЖШжЕБШНЯДѓЕФЧщПіЃЌМДЬнЖШЗНЯђППНќ x жсЁЃЫљвдЃЌg2
КЭ g4 дк C ЕФзѓгвЮЛжУЃЌДЫЪБ weight = |gy| / |gx| ЁЃзѓБпЕФЭМЪЧ xЃЌy
ЗНЯђЬнЖШЗћКХЯрЭЌЕФЧщПіЃЌгвБпЪЧ xЃЌy ЗНЯђЬнЖШЗћКХЯрЗДЕФЧщПіЁЃ
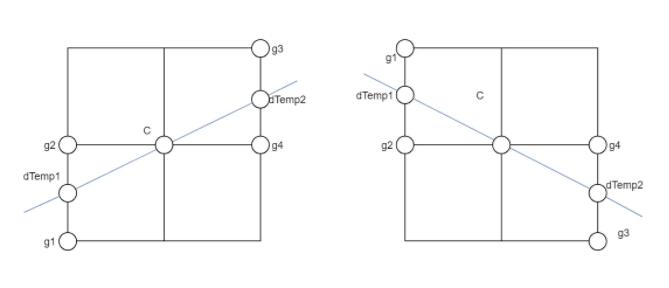
гЩЩЯУцПЩжЊЃЌПЩвдЕУЕНШчЯТаХЯЂЃКg2 = d[i, j-1]ЃЛg4 =
d[i, j+1]ЃЛ
зѓЭМЃКg1 = d[i+1, j-1]ЃЛg3 = d[i-1, j+1]ЃЛ
гвЭМЃКg1 = d[i-1, j-1]ЃЛg3 = d[i+1, j+1]ЁЃ
ЯТУцЕФетСНЗљЭМЃЌПЩФмЛсДјРДРэНтАяжњЃК
ШЛКѓЃЌИљОнвдЩЯаХЯЂЃЌДњТыЪЕЯжШчЯТЃК
def NMS(self,
M, dx, dy):
d = np.copy(M)
W, H = M.shape
NMS = np.copy(d)
NMS[0, :] = NMS[W-1, :] = NMS[:, 0] = NMS[:, H-1]
= 0
for i in range(1, W-1):
for j in range(1, H-1):
# ШчЙћЕБЧАЬнЖШЮЊ0ЃЌИУЕуОЭВЛЪЧБпдЕЕу
if M[i, j] == 0:
NMS[i, j] = 0
else:
gradX = dx[i, j] # ЕБЧАЕу x ЗНЯђЕМЪ§
gradY = dy[i, j] # ЕБЧАЕу y ЗНЯђЕМЪ§
gradTemp = d[i, j] # ЕБЧАЬнЖШЕу
# ШчЙћ y ЗНЯђЬнЖШжЕБШНЯДѓЃЌЫЕУїЕМЪ§ЗНЯђЧїЯђгк y ЗжСП
if np.abs(gradY) > np.abs(gradX):
weight = np.abs(gradX) / np.abs(gradY) # ШЈжи
grad2 = d[i-1, j]
grad4 = d[i+1, j]
# ШчЙћ x, y ЗНЯђЕМЪ§ЗћКХвЛжТ
# ЯёЫиЕуЮЛжУЙиЯЕ
# g1 g2
# c
# g4 g3
if gradX * gradY > 0:
grad1 = d[i-1, j-1]
grad3 = d[i+1, j+1]
# ШчЙћ xЃЌy ЗНЯђЕМЪ§ЗћКХЯрЗД
# ЯёЫиЕуЮЛжУЙиЯЕ
# g2 g1
# c
# g3 g4
else:
grad1 = d[i-1, j+1]
grad3 = d[i+1, j-1]
# ШчЙћ x ЗНЯђЬнЖШжЕБШНЯДѓ
else:
weight = np.abs(gradY) / np.abs(gradX)
grad2 = d[i, j-1]
grad4 = d[i, j+1]
# ШчЙћ x, y ЗНЯђЕМЪ§ЗћКХвЛжТ
# ЯёЫиЕуЮЛжУЙиЯЕ
# g3
# g2 c g4
# g1
if gradX * gradY > 0:
grad1 = d[i+1, j-1]
grad3 = d[i-1, j+1]
# ШчЙћ xЃЌy ЗНЯђЕМЪ§ЗћКХЯрЗД
# ЯёЫиЕуЮЛжУЙиЯЕ
# g1
# g2 c g4
# g3
else:
grad1 = d[i-1, j-1]
grad3 = d[i+1, j+1]
# РћгУ grad1-grad4 ЖдЬнЖШНјааВхжЕ
gradTemp1 = weight * grad1 + (1 - weight) *
grad2
gradTemp2 = weight * grad3 + (1 - weight) *
grad4
# ЕБЧАЯёЫиЕФЬнЖШЪЧОжВПЕФзюДѓжЕЃЌПЩФмЪЧБпдЕЕу
if gradTemp >= gradTemp1 and gradTemp >=
gradTemp2:
NMS[i, j] = gradTemp
else:
# ВЛПЩФмЪЧБпдЕЕу
NMS[i, j] = 0
return NMS |
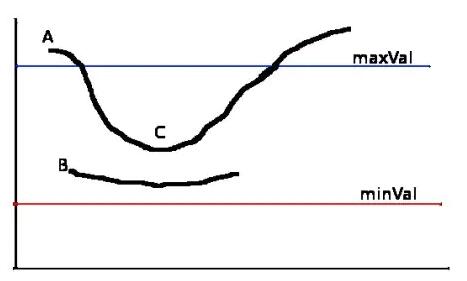
ЫЋуажЕбЁШЁ
етИіНзЖЮОіЖЈФФаЉБпдЕЪЧеце§ЕФБпдЕЃЌФФаЉБпдЕВЛЪЧеце§ЕФБпдЕЁЃЮЊДЫЃЌашвЊЩшжУСНИіуажЕЃЌminVal
КЭ maxValЁЃЬнЖШДѓгк maxVal ЕФШЮКЮБпдЕПЯЖЈЪЧецБпдЕЃЌЖј minVal вдЯТЕФБпдЕПЯЖЈЪЧЗЧБпдЕЃЌвђДЫБЛЖЊЦњЁЃЮЛгкетСНИіуажЕжЎМфЕФБпдЕЛсЛљгкЦфСЌЭЈадЖјЗжРрЮЊБпдЕЛђЗЧБпдЕЃЌШчЙћЫќУЧСЌНгЕНЁАПЩППБпдЕЁБЯёЫиЃЌдђЫќУЧБЛЪгЮЊБпдЕЕФвЛВПЗжЁЃЗёдђЃЌвВЛсБЛЖЊЦњЁЃ
ДњТыШчЯТЫљЪОЃК
def double_threshold(self,
NMS):
W, H = NMS.shape
DT = np.zeros([W, H])
# ЖЈвхИпЕЭуажЕ
TL = 0.1 * np.max(NMS)
TH = 0.3 * np.max(NMS)
for i in range(1, W-1):
for j in range(1, H-1):
# ЫЋуажЕбЁШЁ
if (NMS[i, j] < TL):
DT[i, j] = 0
elif (NMS[i, j] > TH):
DT[i, j] = 1
# СЌНг
elif (NMS[i-1, j-1:j+1] < TH).any() or (NMS[i+1,
j-1:j+1].any()
or (NMS[i, [j-1, j+1]] < TH).any()):
DT[i, j] = 1
return DT |
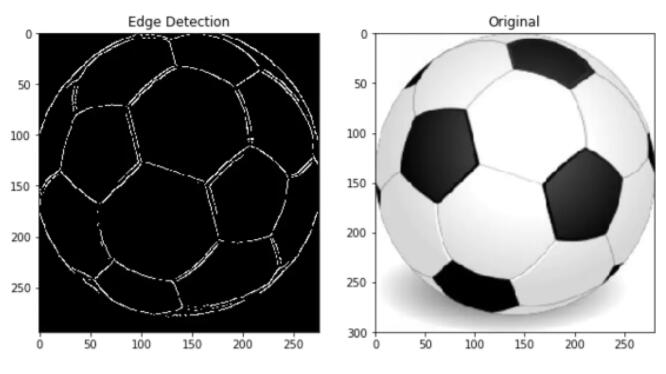
БпдЕМьВтНсЙћ
ОЙ§вдЩЯ 5 ИіЙ§ГЬЃЌПЩвдЕУЕНШчЯТНсЙћЃК
НЋЦфгы OpenCVЃЌskimage ЫуЗЈНјааЖдБШЃК
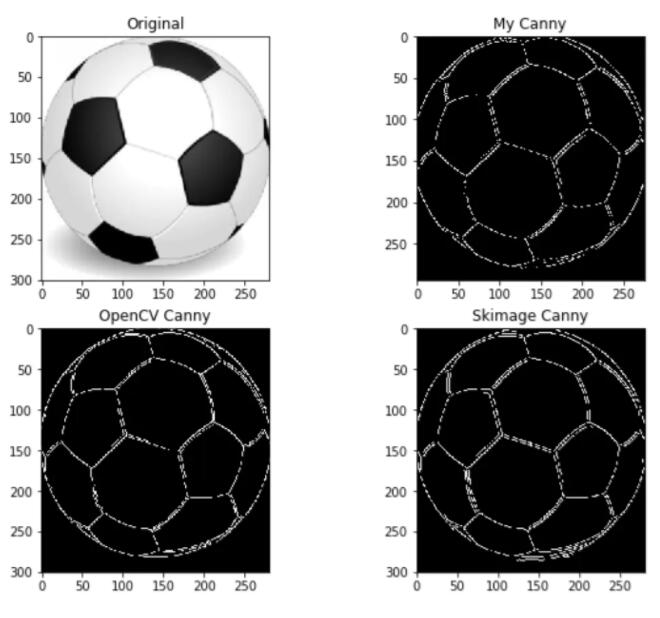
ЮвИіШЫИаОѕ OpenCV ЕФНсЙћЪЧзюКУЕФЃЌЦфДЮЪЧ Skimage ЕФНсЙћЁЃздМКЕФЫуЗЈНсЙћгааЉЕиЗНЛЙЪЧТљДжВкЕФЁЃ
|