| БрМЭЦМі: |
| БОЮФРДздгкCSDN,жївЊНВСЫЪ§ОнНсЙЙЫуЗЈМАpythonЃЌЦфжагаStack, QueueЁЂСДБэКЭЖржиЪ§зщЁЂЩЂСаБэЁЂЖўВцВщевЪїЁЂКьКкЪїЁЂЭМЕФБэЪОКЭЫбЫїЁЃ |
|
Stack, Queue
StackЪЧКѓНјЯШГі, LIFO, ЖгСаЮЊЯШНјЯШГі, FIFO
дкpythonжаСНеп, ЖМПЩвдМђЕЅЕФгУlistЪЕЯж,
Нј, гУappend()
Гі, StackгУpop(), QueueгУpop(0), popЕФЪБКђзЂвтХаЖЯlen(l)
ЖдгкгХЯШЖгСа, вЊгУЕНЧАУцНВЕНЕФЖб
СДБэКЭЖржиЪ§зщ
етаЉЪ§ОнНсЙЙдкpythonжаОЭУЛгаДцдкЕФМлжЕ, гУlistЖМФмЧсЫЩЪЕЯж
ЩЂСаБэ
ЮЊСЫТњзуЪЕЪБВщбЏЕФашЧѓЖјВњЩњЕФЪ§ОнНсЙЙ, ВщбЏИДдгЖШЕФЦкЭћЪЧO(1), зюВюЮЊO(n)
ЮЪЬтУшЪі, ЖдгкnИі(key, value)Жд, дѕбљДцДЂПЩвддкO(1)ЕФЪБМфИДдгЖШФкЛёШЁЬиЖЈkeyЫљЖдгІЕФvalue. етИіЮЪЬтРя, keyФЌШЯЪЧint, ЕБШЛkeyПЩвдЪЧзжЗћДЎЛђЦфЫћ, ФЧОЭЯыАьЗЈАбkeyзЊЛЛГЩint.
зюМђЕЅЕФЗНЗЈЪЧжБНгбАжЗБэ , ОЭЪЧДДНЈКЭkeyПеМфвЛбљДѓаЁЕФЪ§зщA, АбvalueДцДЂЕНЪ§зщA[key]жа.
етИіЗНЗЈМђЕЅ, ЖдгІkeyПеМфВЛДѓЕФЧщПівВПЩвдгУ, ЕЋЪЧЕБkeyПеМфКмДѓЪБ, етИіЬЋКФФкДцСЫ, ЖјЧвУЛгаБивЊ, БШШчжЛга10ИіЗЖЮЇдк1ЕН1000000ЕФkey, ФувЊЗжХфИіФЧУДДѓЕФЪ§зщ, УїЯдВЛКЯЪЪ
ЩЂСаЗНЗЈ , здШЛЯыЕНЮвУЧгІИУгУвЛИіНЯаЁЕФЪ§зщРДДцДЂ, ФЧУДОЭашвЊАбkeyПеМфЗЖЮЇжаЕФЪ§зжгГЩфЕННЯаЁЫљДцДЂПеМфЩЯРД. етИігГЩфЕФЗНЗЈ, ГЦЮЊЩЂСаКЏЪ§ . ЩЂСаКЏЪ§ЕФбЁдёЪЧКмЙиМќЕФ, ЖјЧветИіУЛгаОјЖдЕФКУЛЕ, УПИіЩЂСаКЏЪ§ЖМгаЫќЕФЪЪгУЗЖЮЇ.
ГЃгУЕФЩЂСаКЏЪ§ШчЯТ, НЋЙиМќзжkгГЩфЕНmИіВл
Г§ЗЈЩЂСаЗЈ, h(k) = k mod m
ГЫЗЈЩЂСаЗЈ, h(k) = |m(KA mod 1)|, 0 ШЋгђЩЂСа, ЯыЗЈОЭЪЧзМБИвЛзщЩЂСаКЏЪ§, УПДЮЪЙгУЪБЫцЛњбЁдёвЛИі, РДПЫЗўЩЂСаКЏЪ§ЕФОжЯоад. БШШчЖЈвхЩЂСаКЏЪ§зщ,h(k) = ((ak+b) mod p)mod m, pЪЧзуЙЛДѓЕФжЪЪ§, ЫцЛњбЁдёВЛЭЌЕФa,bВњЩњВЛЭЌЕФЩЂСаКЏЪ§
ФЧУДАбвЛИіДѓЕФЪ§зжПеМфгГЩфЕНвЛИіНЯаЁЕФЪ§зжПеМфЩЯ, ФЧУДПЯЖЈЛсгажиИД, етЪЧВЛПЩБмУтЕФ, етжжжиИДГЦЮЊХізВ (collision).
гаХізВОЭвЊЯыАьЗЈНтОі, зюМђЕЅЕФЯыЗЈ, ОЭЪЧСДНгЗЈ .
РэЯызДЬЌУПИіВлРяУцжЛЗХвЛИіkey, ФЧУДsearchПЯЖЈЪЧO(1)ЕФ, жБНгОЭевЕН. ЕЋЪЧжиИДЪЧВЛПЩБмУт, ШчЙћгаЖрИіkeyБЛЗжХфЕНЭЌвЛИіВл, дѕУДАь
ФЧУДдкВлжаДцЗХвЛИіkeyЕФСДБэРДДцДЂЖрИіkey, етбљsearchПЯЖЈДѓгкO(1), зюВюЕФЧщПіЮЊO(n). ЦНОљЮЊO(1+a), aЮЊзАдивђзг(load factor), вЛИіВлжаЦНОљДцДЂЕФдЊЫиЪ§.
ЫљвдЮвУЧгІИУОЁСПМѕЩйХізВЕФПЩФмад, зюжБНгЕФЗНЗЈЪЧМѕЩйзАдивђзг
СэвЛжжНтОіХізВЕФЗНЗЈОЭЪЧПЊЗХбАжЗЗЈ , зіЗЈЪЧГіЯжХізВЪБ, ИљОнЙцдђЬНВтСэвЛИіВлДцЗХИУдЊЫи
етИіЗНЗЈЕФКУДІОЭЪЧУЛгагУСДБэ, ВЛгУжИеы, НкЪЁЕФПеМфПЩвдЬсЙЉИќЖрЕФВл, ЛЕДІЪЧЪ§ОнПЩФмЛсвчГі, ЫљвдвЊШЗБЃзАдивђзгВЛФмДѓгк1
ЯждкЕФЮЪЬтОЭЪЧЕБЗЂЩњХізВЪБ, дѕУДбљШЅЬНВтЯТвЛИіВл
ЯпадЬНВт, h(k,i)=(h'(k)+i) mod m,i=0,1,ЁЁЃЌm-1, етИіЗНЗЈЛсгаИіЮЪЬт, вЛДЮМЏШК, СЌајБЛеМгУЕФВлЛсВЛЖЯдіМг, ФЧУДКѓУцеьВтЕФЪБМфЛсБфГЄ
ЖўДЮЬНВт, h(k,i)=(h'(k)+c1*i+c2*i2 ) mod m, етбљВЛгУвЛИіИіСЌајШЅЬНВт, вђЮЊгаИіЦНЗН, ЛсИєЕФдЖаЉ, ЕЋЛЙЪЧЛсгаЖўДЮМЏШК, вђЮЊГѕЪМЬНВтОіЖЈСЫећИіЬНВтађСа
ЫЋжиЙўЯЃ , h(k,i)=(h1(k)+i*h2(k)) mod m, етЪБЯждкзюКУЕФЬНВтЗНЗЈ
ПЊЗХбАжЗЗЈsearchИДдгЖШЮЊO(1/(1-a)), aЮЊзАдивђзг
жЙгкжСЩЦ, гаУЛгавЛжжЗНЗЈПЩвддкзюВюЧщПіЯТвВФмДяЕНO(1), РэТлЩЯЪЧгаЕФ, ЕЋБиаыЪЧЪфШыЪ§ОнЮЊОВЬЌЪ§Он, ЗНЗЈНаperfect hashing, ЭъУРЩЂСа
ЫМТЗвВВЛИДдг, ВЩгУСНМЖhash, вЛМЖРрЫЦгкСДНгЗЈ, ВЩгУШЋгђЩЂСаАбnИіЪфШыЛЎЗжЕНmИіВлФк, ШЛКѓдкУПИіВлФкНјааЖўМЖЩЂСа, ВЂШЗБЃЖўМЖЩЂСаЪЧЮоГхЭЛЕФ.
ПЩвджЄУїЕБ, m = n2 ЪБ, ГіЯжГхЭЛЕФИХТЪаЁгк0.5, ЫљвджЛвЊБЃжЄвЛМЖЩЂСаКЏЪ§бЁШЁКЯЪЪ, ПЩвдОљдШЕФАбnИідЊЫиЗжВМЕНmИіВлжа, ВЂБЃжЄВлжаЖўМЖЩЂСаЕФПеМфзуЙЛДѓ, ОЭПЩвдДяЕНаЇЙћ.
дкpythonжа, ЮоашздМКЪЕЯжЩЂСаБэ, гУdictОЭПЩвд
ЖўВцВщевЪї
ЖўВцВщевЪї, вВЪЧвЛжжБугкВщевЕФЪ§ОнНсЙЙ, ШЮвтвЛИіЪїНкЕуЕФзѓзгЪїЖМаЁгкИУНкЕу, гвзгЪїЖМДѓгкИУНкЕу. ЫцЛњЙЙдьЕФЖўВцЪї, РэЯыЪїИпЮЊlogn, ЦфЩЯВйзїЕФЦНОљИДдгЖШЮЊO(logn)
МШШЛЧАУцЕФHashПЩвдЬсЙЉO(1)ЕФsearch, ЮЊЪВУДЛЙашвЊетИіЪ§ОнНсЙЙСЫ, ЫћИќСщЛю, ЫћПЩвдЬсЙЉГ§searchЭтЕФЦфЫћВйзї, ШчMinimum, Maximum, Predecessor, Successor, InsertЕШВйзї.
ЫћПЩвдгУгкзжЕф, ЛђгХЯШЖгСа, ПЩЪЧШчЙћзжЕф, ЮвЪзбЁHash, гХЯШЖгСа, ЮвЪзбЁЖб, УЛгаЯыЕНЗЧвЊгУЖўВцЪїЕФР§зг, ЭљЭљЪЧЖўВцЪїЕФБфжжИќгаЪЕгУМлжЕ.
ЖўВцЪїзюДѓЕФЮЪЬт, ЪЧЙЙдьЫГађВЛФмБЃжЄЪЧЫцЛњЕФ, ОЭЪЧЫЕВЛФмБЃжЄЖўВцЪїЪЧЦНКтЕФ, ВЛЦНКтОЭТщЗГСЫ, МЋЯоЧщПіЪЧИіЕЅСДБэ. ГЃгУЕФвЛжжЦНКтЖўВцЪї, ЮЊКьКкЪї.
BЪївВЪЧЖўВцЪїКмгагУЕФБфжж, ГЃгУгкДДНЈЪ§ОнПтЫїв§, КѓУцЛсОпЬхЬжТл.
ЯТУцИјГіpythonЪЕЯж
1 class Node:
2
3 def __init__(self,data):
4 self.left = None
5 self.right = None
6 self.parent = None
7 self.data = data
8
9 def insert(self, data):
10 # #recursion version
11 # if data < self.data:
12 # if self.left:
13 # self.left.insert(data)
14 # else:
15 # self.left = self.createNode(data)
16 # self.left.parent = self
17 # else:
18 # if self.right:
19 # self.right.insert(data)
20 # else:
21 # self.right = self.createNode(data)
22 # self.right.parent = self
23 #non-recursion version
24 node = self
25 while node:
26 if data < node.data:
27 next = node.left
28 else:
29 next = node.right
30 if next:
31 node = next
32 else:
33 break
34 nn = self.createNode(data)
35 if data < node.data:
36 node.left = nn
37 node.left.parent = node
38 else:
39 node.right = nn
40 node.right.parent = node
41 return nn
42
43 def createNode(self, data):
44 return Node(data)
45
46 def printTree (self):
47 """жаађБщРњ"""
48 if self.left:
49 self.left.printTree()
50 print self.data
51 if self.right:
52 self.right.printTree()
53
54 def maxNode(self):
55 if self.right:
56 return self.right.maxNode()
57 else:
58 return self
59
60 def minNode (self):
61 if self.left:
62 return self.left.maxNode()
63 else:
64 return self
65
66 def lookup(self, data):
67 if self.data == data:
68 return self
69
70 if self.data > data:
71 if self.left:
72 return self.left.lookup(data)
73 else:
74 return None
75 else:
76 if self.right:
77 return self.right.lookup(data)
78 else:
79 return None
80
81 def successor(self):
82 """
83 гагвзгЪїЪБ,КмШнвзРэНт, ШЁгвзгЪїЕФзюаЁжЕ
84 УЛгагвзгЪїЪБ, вВОЭЪЧЫЕИУНкЕуЪЧЕБЧАзгЪїЕФзюДѓНкЕу, ИУНкЕуЕФКѓМЬЮЊАбИУзгЪїзїЮЊзѓзгЪїЕФзюНќЕФИљНкЕу
85 ШчЙћвЊШЁЧАЧ§, ЕРРэвЛбљ
86 """
87 n= self
88 if n.right:
89 return n.right.minNode()
90 else:
91 p = n.parent
92 while p and p.right == n:
93 n = p
94 p = p.parent
95 return p
96
97 def delete(self, root):
98 """
99 ЖдгкУЛгазгЪї,ЛђжЛгавЛИізгЪї, ЖМКмКУДІРэ
100 ШчЙћгаСНИізгЪї, зіЗЈЪЧАбНкЕуКѓМЬНкЕуПНБДЕНЕБЧАНкЕу, ШЛКѓЩОГ§КѓМЬНкЕу
101 етВЛЪЧЮЈвЛЕФзіЗЈ, ЕЋетбљзіЖдЪїдгаЕФЦНКтадЦЦЛЕзюаЁ
102 ЕБrootБЛЩОГ§ЪБ, rootЛсБф, ЫљвдашвЊЗЕЛиаТЕФroot
103 """
104 n= self
105
106 if n.left and n.right:
107 s = n.right.minNode()
108 n.data = s.data
109 root = s.delete(root)
110 return root
111
112 #ЬиЪтДІРэИљНкЕу
113 if not n.parent:
114 if n.left:
115 root = n.left
116 n.left = None
117 root.parent = None
118 elif n.right:
119 root = n.right
120 n.right = None
121 root.parent = None
122 else:
123 root = None
124
125 return root
126
127 if not n.left and not n.right:
128 if n.parent.left == n:
129 n.parent.left = None
130 else:
131 n.parent.right = None
132 else:
133 if n.parent.left == n:
134 n.parent.left = n.left or n.right
135 else:
136 n.parent.right = n.left or n.right
137 n.parent = None
138 return root
139 def buildTree():
140 root = Node(8)
141 root.insert(3)
142 root.insert(10)
143 root.insert(1)
144 root.insert(6)
145 root.insert(4)
146 root.insert(7)
147 root.insert(14)
148 root.insert(13)
149 root.printTree() |
КьКкЪї
ЧАУцЫЕСЫ, ЖўВцВщевЪїзюДѓЕФЮЪЬтОЭЪЧЦНКтад, ЖјКьКкЪїОЭКмКУЕФНтОіСЫетИіЮЪЬт, ЪВУДЪЧКьКкЪї
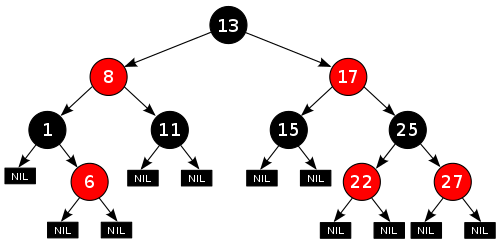
1ЃЉУПИіНсЕувЊУДЪЧКьЕФЃЌвЊУДЪЧКкЕФЁЃ
2ЃЉИљНсЕуЪЧКкЕФЁЃ
3ЃЉУПИівЖНсЕуЃЌМДПеНсЕуЃЈNILЃЉЪЧКкЕФЁЃ
4ЃЉШчЙћвЛИіНсЕуЪЧКьЕФЃЌФЧУДЫќЕФСЉИіЖљзгЖМЪЧКкЕФЁЃ
5ЃЉЖдУПИіНсЕуЃЌДгИУНсЕуЕНЦфзгЫяНсЕуЕФЫљгаТЗОЖЩЯАќКЌЯрЭЌЪ§ФПЕФКкНсЕуЁЃ
ТњзуЩЯУцМИЕуОЭНазіКьКкЪї, ЬЙАзЕФНВ, етИіЪ§ОнНсЙЙецЪЧгаЙЛИДдгЕФ, ЖдгкФмЯыГіетбљЗНЗЈЕФNB, ГчАнжЎЧщШчЬЯЬЯНЫЎ
етИіЪїгаЪВУД, УїЯдОЭЪЧБШНЯЦНКт, вђЮЊИљЕНвЖЕФзюГЄОрРызюЖрЪЧзюЖЬОрРыЕФ2БЖ, ЮЊЪВУД
вђЮЊКкИп(АќКЌЕФКкНкЕуЪ§)ЖМЪЧвЛбљЕФ, ЫљвдзюЖЬТЗОЖОЭЪЧШЋКк, зюГЄТЗОЖЮЊКьКкНЛЬц, ЫљвдзюГЄзюЖрЪЧзюЖЬ2БЖ.
ПЩвджЄУїКьКкЪїЕФИпЖШжСЖрЮЊ2lg(n+1), ЪїЕФВйзїИДдгЖШЭъШЋШЁОігкЪїИп, етОЭКмКУЕФНтОіСЫЖўВцЪїЕФВЛЦНКтЮЪЬт.
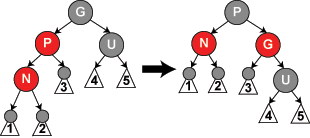
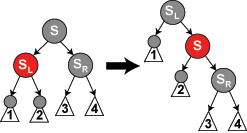
КьКкЪїБШНЯгаЬиЩЋЕФВйзїЮЊа§зЊ(pivot) ,
КьКкЪїЕФВхШыВйзї
ЖдгкКьКкЪїЕФВхШы, ФЌШЯВхШыНкЕуЮЊКьНкЕу, БиаыЪЧКьЕФ, ИљЪЧКкЕФ, ШчЙћВхКкЕФ, ОЭКЭЖўВцЪїУЛгаЧјБ№СЫ. ЖјЧвВхКьЕФВЛЛсДђЦЦКкИпЯрЭЌЙцдђ5), жЛЛсДђЦЦЙцдђ2), 4), ЫљвджЛашвЊеыЖдетСНИіЙцдђНјааrebalance. ХзПЊrebalanceВЛЬИ, КьКкЪїЕФВхШыВйзїКЭЖўВцЪїЯрЭЌЕФ, ЕЋЪЧЙиМќОЭЪЧВхЭъКѓЕФrebalanceЙ§ГЬРДБЃжЄКьКкЪїЕФЙцдђ.
rebalanceЕФЙ§ГЬЪЧБШНЯИДдгЕФ, ВЛЙ§ЮвУЧПЩвдcase by caseЕФЗжЮі, змЕФРДЫЕжЛгаСНжжВйзї, а§зЊ КЭБфЩЋ , ВЂЧвжЛгаГіЯжСЌајСНИіКкЩЋНкЕуЪБВХашвЊа§зЊ.
1) ВхШыЕФЪЧИљНсЕу,жБНгАбДЫНсЕуБфЮЊКкЩЋ
2) ВхШыЕФНсЕуЕФИИНсЕуЪЧКкЩЋ, КмКУЪВУДвВВЛгУзі
3) ЕБЧАНсЕуЕФИИНсЕуЪЧКьЩЋЧвзцИИНсЕуЕФСэвЛИізгНсЕуЃЈЪхЪхНсЕуЃЉЪЧКьЩЋ
ИИНкЕуКьЩЋ, ДђЦЦСЫЙцдђ4), ЖјЧвПЩвдЭЦЖЯзцИИПЯЖЈЪЧКкЕФ, ВЂЧвЪхЪхНсЕуЪЧКьЩЋ, ЫЕУїетИізгЪїЪЧЦНКтЕФ(КкКьЯрМф), ВЛашвЊа§зЊ.
МШШЛВЛа§зЊОЭБфЩЋ, ИИНкЕуКЭЪхЪхНкЕуБфКкЃЌзцИИНсЕуБфКьЃЌФЧетбљзцИИНкЕуОЭгаПЩФмЮЅЗДЙцдђ, ЫљвдМЬајЖдзцИИНкЕуНјааrebalance
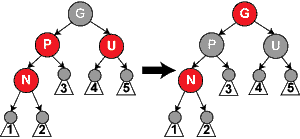
4)ЕБЧАНкЕуЕФИИНкЕуЪЧКьЩЋ,ЪхЪхНкЕуЪЧКкЩЋ
етжжЧщПіБШНЯИДдг, вђЮЊзцИИПЯЖЈЪЧКкЕФ, ЪхЪхНкЕувВЪЧКкЕФ, ЫљвдГіЯжСЌајСНИіКкЩЋНкЕу, ЪїВЛЦНКт, ПЯЖЈашвЊа§зЊ, дѕУДИіа§зЊЗЈ
ЪзЯШвЊПДЪхЪхНкЕуЪЧзцИИНкЕуЕФзѓНкЕу, ЛЙЪЧгвНкЕу, етИіОіЖЈСЫа§зЊЕФЗНЯђ, ЮвУЧжЛашвЊЬжТлЦфжавЛжжЧщПі, СэвЛжжЧщПіОЭЪЧЭљЯрЗДЕФЗНЯђа§зЊОЭПЩвдСЫ
ЮвУЧОЭЬжТлвЛЯТЪхЪхНкЕуЪЧзцИИНкЕуЕФгвНкЕуЕФЧщПі, ОЭЪЧИИНкЕуЮЊзцИИНкЕуЕФзѓНкЕу, етЖљИљОнЕБЧАНкЕуЮЛжУгжЗжЮЊСНжжЧщПі,
a)ЕБЧАНкЕуЮЊИИНкЕуЕФгвНкЕу, вдИИНкЕузѓа§, ВЂАбИИНкЕузїЮЊЕБЧАНкЕу
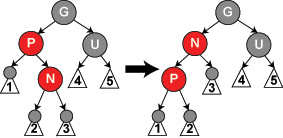
b)ЕБЧАНкЕуЮЊИИНкЕуЕФзѓНкЕу, вдзцИИНкЕугва§, ВЂИФБфИИНкЕу, зцИИНкЕубеЩЋ
ДѓМвЯывЛЯТ, етжжЧщПіЯТа§зЊЕФФПЕФЪЧвђЮЊдкзцИИНкЕуЕФгвзгЪїЩЯСЌајГіЯжСНИіКкНкЕу, ЫљвдЮвУЧзюжеашвЊЭЈЙ§вЛДЮгва§РДдіМггвзгЪїЕФИпЖШ, ОЭШчb)ЧщПіЫљЪО, ЭЈЙ§вЛДЮгва§, ВЂИФЩЋ, ДяЕНСЫЛжИДКьКкЪїЕФЫљгаЙцдђ.
ЕЋЖдгкa), ФуПЩвдЪдзХжБНггва§, ФуУЛЗЈИФЩЋРДТњзуКьКкЪїЕФЙцдђ, ЫљвдвЊЯШЭЈЙ§вЛДЮзѓа§РДДяЕНb), НјЖјНјаагва§, Ыљвдa)жЛЪЧвЛИіжаМфВНжш.
КУСЫ, етБпЗжЮіЭъЪхЪхНкЕуЪЧзцИИНкЕуЕФгвНкЕуЕФЧщПі, ЖдгкЪхЪхНкЕуЪЧзцИИНкЕуЕФзѓНкЕуЕФЧщПі, РрЫЦЯыЯывВФмУїАз.
КьКкЪїЕФЩОГ§Вйзї
ЛиЯывЛЯТЧАУцЖўВцЪїЕФЩОГ§ВйзїЃЌ ШчЙћашвЊЩОГ§ЕФНкЕугаСНИіЖљзгЃЌФЧУДЮЪЬтПЩвдБЛзЊЛЏГЩЩОГ§СэвЛИіжЛгавЛИіЖљзгЕФНкЕуЕФЮЪЬт ЃЈетРяЕФЖљзгЃЌЮЊЗЧвЖзгНкЕуЕФЖљзгЃЌКьКкЪїжаleafНкЕуЖМЪЧNullНкЕуЃЉЁЃЮЊЪВУДЃПвђЮЊетЖљЕФЩОГ§ВйзїЙ§ГЬЃЌ ЪЧевЕНИУНкЕуЕФКѓМЬЃЌ copyЕНЕБЧАНкЕуЃЌ ШЛКѓЩОГ§КѓМЬЃЈгвзгЪїжазюаЁНкЕуЃЉЃЌДЫЪБЕФКѓМЬНкЕузюЖржЛгавЛИіЖљзгЃЈВЂЧвЪЧгвЖљзгЃЉЃЌЗёдђОЭВЛЪЧКѓМЬЁЃ
ЫљвдЮЪЬтМђЛЏЮЊЃЌЮвУЧжЛашвЊЬжТлЩОГ§жЛгавЛИіЖљзгЕФНкЕу (ШчЙћЫќСНИіЖљзгЖМЮЊПеЃЌМДОљЮЊвЖзгЃЌЮвУЧШЮвтНЋЦфжавЛИіПДзїЫќЕФЖљзг)ЃЌЕНетЖљЮвУЧОЭАбвЛИіПДЫЦИДдгЕФЮЪЬтзЊЛЏЮЊЯрЖдМђЕЅЕФЮЪЬтЁЃ
дкЩОГ§етИіНкЕуЪБЃЌИљОнбеЩЋВЛЭЌЃЌЗжЮЊ3жжЧщПіЃЌ
1ЃЉИУНкЕуЮЊКьЩЋЃЌетжжЧщПівЛЖЈУЛгаЖљзгЃЌжБНгЩОГ§УЛгаШЮКЮгАЯь
2ЃЉИУНкЕуЮЊКкЩЋЃЌШчЙћгаЖљзгвЛЖЈЪЧгаЧвжЛгавЛИіКьЩЋЕФЖљзгЃЌетИівВКУАьЃЌАбКьЩЋЕФЖљзгЬцЛЛИФНкЕуЃЌ ВЂИФЮЊКкЩЋЁЃ
3ЃЉИУНкЕуЮЊКкЩЋЃЌЧвУЛгаЖљзгЃЌМДжЛгаСНИівЖзгЃЌетИіЮЪЬтОЭБШНЯИДдгСЫЃЌФужБНгЩОГ§етИіНкЕуЃЌ ЦЦЛЕСЫЙцдђ5ЃЉЃЌетИіЗжжЇУїЯдБШЦфЫћКкИпЩй1.
ЯждкОЭЖдЩЯУцЧщПі3ЃЉОпЬхЗжЮіЃЌЫМТЗЪЧЪВУДЃЌУїЯджБНгДгИУНкЕуЩЯУЛЗЈНтОіЮЪЬтЃЌЫћБЛИЩЕєСЫЃЌЫћвВУЛгаЖљзгЃЌФЧОЭевЫћИИЧзЃЌажЕмАЩЃЌзмвЊгаШЫИКд№ЕФТ№ЃЌ ШчЙћЫћУЛгаИИЧзСЫЃЌЙТЖљЃЌ ЫћОЭЪЧИљНкЕуЃЌ ЫћБЛИЩЕєЃЌ ЪїЖМУЛСЫЃЌЕБШЛВЛгУзіЩЖСЫЁЃЖјЧвШчЙћгаИИЧзЃЌЫћОЭвЛЖЈгаажЕмЃЌВЛСїаажЛЩњвЛИіЁЃ
ФЧУДОЭАбЫћЕФИИНкЕуЃЌажЕмНкЕувЛЦ№ПМТЧНјРДЃЌаЮГЩвЛИізгЪїРДНтОіетИіЮЪЬтЁЃдѕУДНтОіЃП ФЧУДЮвОЭРДЬИЬИЮвЕФРэНт,
ШСЭтБиЯШАВФкЃЌЕквЛВНЮвУЧЪзЯШБЃжЄетИізгЪїФкВПЪЧТњзуКьКкЪїЙцдђЕФ(ЮвУЧМйЩшБЛЩОГ§ЕФНкЕудкзѓзгЪї, дкгвзгЪївЛбљДІРэ, жЛЪЧа§зЊЗНЯђЯрЗД)
ЯждкЕФЧщПіЪББЛЩОГ§згЪїЕФКкИпБШЫћЕФажЕмзгЪїКкИпЩй1, дѕУДАь
a)зюМђЕЅЕФЪЧ, АбажЕмНкЕуИФКь, етбљШУЫћЕФКкИпвВМѕ1
етжжИФЗЈБиаыТњзуЕФЬѕМўЪЧ, ажЕмНкЕуЪзЯШЪЧКкЕФ, ЖјЧвЫћЕФзгНкЕувВЖМЪЧКкЕФ(Case 2 ), етбљПЩвджБНгАбажЕмНкЕугЩКкИФКь, дкВЛЦЦЛЕЦфЫћЙцдђЕФЧАЬсЯТ, ЪЙСНИізгЪїКкИпЯрЭЌ.
ЕЋЪЧФуВЛФмБЃжЄетжжcaseвЛЖЈГіЯж, ЦфЫћЧщПіШчЯТ,
b)ажЕмНкЕуЪЧКьЕФ, етжжЧщПіЯТ, ажЕмНкЕувЛЖЈЪЧСНИіКкЩЋзгНкЕу(Case1 ). етжжЧщПіЯТ, ЭЈЙ§ЖдИИНкЕуЕФвЛДЮзѓа§ВЂИФЩЋ, ОЭФмЙЛТњзу(Case 2)ЕФЬѕМў.
c)ажЕмНкЕуЪЧКкЕФ, ЕЋажЕмНкЕуЕФзгНкЕужСЩйгавЛИіЪЧКьЩЋЕФ. етбљФувВУЛЗЈжБНгИФажЕмНкЕуЕФбеЩЋ, ИФСЫОЭКЭКьзгНкЕуУЌЖмСЫ.
c1)ШчЙћажЕмНкЕуЕФгвЖљзгSR ЪЧКьЩЋЕФ(Case4 ), зіЗЈЪЧАбИИНкЕузівЛДЮзѓа§, ВЂАбИИНкЕуКЭЖМИФГЩSR КкЩЋ , етбљзѓгвзгЪїЕФКкИпОЭЯрЭЌСЫ.
c2)ШчЙћажЕмНкЕужЛгазѓЖљзгSL ЪЧКьЩЋЕФ(Case3 ), ЮоЗЈжБНгАДc1ДІРэ, вђЮЊЭЈЙ§зѓа§АбгвзгЪїХВСЫвЛИіКкНкЕу, ЕНзѓзгЪї, ЕЋгвзгЪїУЛгаПЩвдИФКкЕФКьНкЕу, ЕМжТгвзгЪїКкИпЩй1.
ЫљвдашвЊЭЈЙ§ЖдажЕмНкЕуSНјаавЛДЮгва§, ВЂИФЩЋ, ОЭПЩвдТњзу(Case 4 )ЕФЬѕМў.
ЕкЖўВН, ЯждкзгЪїФкВПКкИпвбОЦНКт, ЕЋЖдгкећИіКьКкЪїЖјбд, КкИпЪЧЗёЦНКт
ПЩвдПДЕНЖдгкc)Жјбд, згЪїФкЕФКкИпВЛдіВЛМѕ, ЖдШЋОжУЛгагАЯь
ЕЋЖдгкa)b)Жјбд, ЮЊСЫЦНКтФкВПКкИп, згЪїЕФКкИпећИіМѕЩй1 (Case 2 )
ШчЙћзгЪїЕФИљНсЕуЮЊКь, АбЫќБфКкОЭПЩвдНтОіетИіЮЪЬт(КьКкЪїжа, НкЕуБфКкБШНЯЗНБужЛашПМТЧКкИп, БфКьБШНЯТщЗГ)
ШчЙћзгЪїИљНкЕуЮЊКк, етОЭЯрЕБгк, АбЮвУЧИеНтОіЕФЮЪЬт(згЪїКкИпЩй1), ЭљЩЯ(ГЏИљНкЕуЗНЯђ)ЬсЩ§СЫвЛВу, ЕнЙщШЅНтОі. ШчЙћетИіЮЪЬтвЛжБЮоЗЈНтОі, зюжеЛсЬсЩ§ЕНИљНкЕуЕФЮЛжУ, етЪБетИіЮЪЬтОЭВЛгУНтОіСЫ, ЯрЕБгкАбећИіКьКкЪїЕФКкИпЖММѕСЫ1, етбљвВЦНКтСЫ.
гаСЫЩЯУцЕФРэНтдйШЅПДWikiЛђЫуЗЈЕМТлОпЬхЕФЫуЗЈОЭБШНЯШнвзСЫ, ИіЖљОѕЕУЫќУЧЖдгкЩОГ§НтЪЭЕФВЛЙЛЧхГў, ЖјЧвЭМЛЕФБШНЯШУШЫРЇЛѓ, БШШчФуПДПД(Case1 )ЕФЭМ, ЖдгкзѓЭМЪЧЩОГ§КѓЕФЧщПі, вЊзЊЛЏЮЊгвЭМ, ФуПДПДзѓЭМгаКкИпВЛЦНКтТ№, УїЯдЪЧЦНКтЕФТ№, ФЧЛЙзіЪВУД ЖдгкNЖјбд, вЊУДЪЧвЖНкЕу, вЊУДЪЧвЛПУзгЪї, ЫћЕФКкИпгІИУКЭ3,4,5,6НкЕу(ЛђзгЪї)вЛжТЕФ, ФуЫЕетИіЭМЛЕФЙжВЛЙж, ЮѓЕМадКмЧП, жЛФмДѓИХЪОвт, ВЛЙ§ДѓМвЖМгУетИіЭМ, ЮввВОЭВЛИФСЫ.
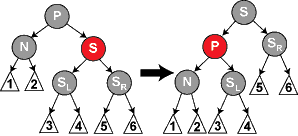
1ЃЉажЕмS ЪЧКьЩЋЁЃ
дкетжжЧщПіЯТЮвУЧдкNЕФИИЧзЩЯзізѓа§зЊ ЃЌАбКьЩЋажЕмзЊЛЛГЩNЕФзцИИЁЃЮвУЧНгзХЖдЕї N ЕФИИЧзКЭзцИИЕФбеЩЋЁЃ
2ЃЉажЕмS КЭ S ЕФЖљзгЖМЪЧКкЩЋЕФ
ЯТУцСНжжЧщПіЕФЧјБ№НіНіЪЧзгЪїИљНкЕуЕФбеЩЋВЛЭЌ, ЩЯУцвбОНтЪЭЙ§СЫ.
дкетжжЧщПіЯТЃЌЮвУЧМђЕЅЕФжиЛц S ЮЊКьЩЋЁЃНсЙћЪЧЭЈЙ§SЕФЫљгаТЗОЖЃЌЫќУЧОЭЪЧвдЧАВЛ ЭЈЙ§ N ЕФФЧаЉТЗОЖЃЌЖМЩйСЫвЛИіКкЩЋНкЕуЁЃвђЮЊЩОГ§ N ЕФГѕЪМЕФИИЧзЪЙЭЈЙ§ N ЕФЫљгаТЗОЖЩйСЫвЛИіКкЩЋНкЕуЃЌетЪЙЪТЧщЖМЦНКтСЫЦ№РДЁЃЕЋЪЧЃЌЭЈЙ§ P ЕФЫљгаТЗОЖЯждкБШВЛЭЈЙ§ P ЕФТЗОЖЩйСЫвЛИіКкЩЋНкЕуЃЌЫљвдШдШЛЮЅЗДЪєад4ЁЃвЊаое§етИіЮЪЬтЃЌЮвУЧвЊДгЧщПі 1 ПЊЪМЃЌдк P ЩЯзіжиаТЦНКтДІРэЁЃ
S КЭ S ЕФЖљзгЖМЪЧКкЩЋЃЌЕЋЪЧ N ЕФИИЧзЪЧКьЩЋЁЃдкетжжЧщПіЯТЃЌЮвУЧМђЕЅЕФНЛЛЛ N ЕФажЕмКЭИИЧзЕФбеЩЋЁЃетВЛгАЯьВЛЭЈЙ§ N ЕФТЗОЖЕФКкЩЋНкЕуЕФЪ§ФПЃЌЕЋЪЧЫќдкЭЈЙ§ N ЕФТЗОЖЩЯЖдКкЩЋНкЕуЪ§ФПдіМгСЫвЛЃЌЬэВЙСЫдкетаЉТЗОЖЩЯЩОГ§ЕФКкЩЋНкЕуЁЃ
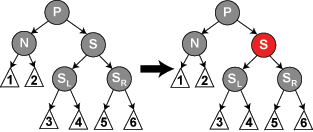
3ЃЉS ЪЧКкЩЋЃЌS ЕФзѓЖљзгЪЧКьЩЋЃЌS ЕФгвЖљзгЪЧКкЩЋЃЌЖј N ЪЧЫќИИЧзЕФзѓЖљзгЁЃдкетжжЧщПіЯТЮвУЧдк S ЩЯзігва§зЊЃЌетбљ S ЕФзѓЖљзгГЩЮЊ S ЕФИИЧзКЭ N ЕФаТажЕмЁЃЮвУЧНгзХНЛЛЛ S КЭЫќЕФаТИИЧзЕФбеЩЋЁЃ
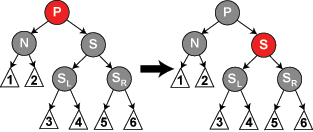
4ЃЉS ЪЧКкЩЋЃЌS ЕФгвЖљзгЪЧКьЩЋЃЌЖј N ЪЧЫќИИЧзЕФзѓЖљзгЁЃдкетжжЧщПіЯТЮвУЧдк N ЕФИИЧзЩЯзізѓа§зЊЃЌетбљ S ГЩЮЊ N ЕФИИЧзКЭ S ЕФгвЖљзгЕФИИЧзЁЃЮвУЧНгзХНЛЛЛ N ЕФИИЧзКЭ S ЕФбеЩЋЃЌВЂЪЙ S ЕФгвЖљзгЮЊКкЩЋЁЃ
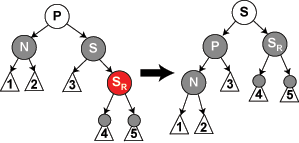
ЯТУцИјГіКьКкЪїЕФpythonЪЕЯж, ЩОГ§УЛаД, вдКѓгаПеВЙ
1 class RBTreeNode(Node):
2 """ red-black tree node"""
3 def __init__(self, data):
4 Node.__init__(self, data)
5 self.color = 'red'
6
7 def createNode(self, data):
8 return RBTreeNode(data)
9
10 def pivotLeft(self):
11 """ """
12 p = self.parent
13 l = self.left
14 r = self.right
15 #if has right child, save the left child of it
16 if r:
17 rl= r.left
18 else:
19 return
20 #after left pivot, r become new root of the child tree, so update r.parent
21 if p:
22 if p.left == self:
23 p.left = r
24 else:
25 p.right = r
26 r.parent = p
27 else:
28 r.parent = None
29 # update r.left, r.right not change
30 r.left = self
31 #update self.parent and self.right, left not change
32 self.parent = r
33 self.right = rl
34
35 return self, r
36 def pivotRight(self):
37 """ same logic with pivotLeft, just exchange the r and l"""
38 p = self.parent
39 l = self.left
40 r = self.right
41 if l:
42 lr= l.right
43 else:
44 return
45 if p:
46 if p.left == self:
47 p.left = l
48 else:
49 p.right = l
50 l.parent = p
51 else:
52 l.parent = None
53 l.right = self
54 self.parent = l
55 self.left = lr
56 return self, l
57
58 def insert(self, data):
59 """"""
60 n = Node.insert(self, data)
61 print n.data
62 #rebalance for insert
63 n.rebalance()
64
65 def rebalance(self):
66 """"""
67 n = self
68 p = n.parent
69 if not p:
70 n.black()
71 return
72 g = p.parent
73 #parent is black, no problem
74 if p and p.isBlack(): return
75
76 u = g.getOtherChild(p)
77 #p is red, u is red, then g must be black
78 if p.isRed()and u and u.isRed():
79 p.black()
80 u.black()
81 g.red()
82 g.rebalance()
83
84 #p is red, but u isn't red, black or leaf
85 if p.isRed():
86 if n.isRight() and p.isLeft():
87 print 'nr, pl'
88 p.pivotLeft()
89 n, p = p, n
90 if n.isLeft() and p.isLeft():
91 print 'nl, pl'
92 p.black()
93 g.red()
94 g.pivotRight()
95 return
96
97 if n.isLeft() and p.isRight():
98 print 'nl, pr'
99 p.pivotRight()
100 n, p = p, n
101 if n.isRight() and p.isRight():
102 print 'nr, pr'
103 p.black()
104 g.red()
105 g.pivotLeft()
106 return
107
108
109 def isLeft(self):
110 n = self
111 p = self.parent
112 if p and n == p.left:
113 return True
114 else:
115 return False
116 def isRight(self):
117 n = self
118 p = self.parent
119 if p and n == p.right:
120 return True
121 else:
122 return False
123 def isBlack(self):
124 if self.color == 'black':
125 return True
126 else:
127 return False
128 def isRed(self):
129 if self.color == 'red':
130 return True
131 else:
132 return False
133 def black(self):
134 self.color = 'black'
135 def red(self):
136 self.color = 'red'
137
138 def getOtherChild(self,child):
139 """ Give one child, and return other child"""
140 if self.left == child:
141 return self.right
142 else:
143 return self.left
144
145 def Print(self, indent):
146 for i in range(indent):
147 print " ",
148 print "%s (%s)" % (self.data, self.color)
149 if not self.left:
150 for i in range(indent+1):
151 print " ",
152 print "None(Black)"
153 else:
154 self.left.Print(indent+1)
155 if not self.right:
156 for i in range(indent+1):
157 print " ",
158 print "None(Black)"
159 else:
160 self.right.Print(indent+1)
161
162 class RBTree:
163 """ red-black tree"""
164 def __init__(self):
165 self.root = None
166
167 def insert(self, data):
168 if self.root:
169 self.root.insert(data)
170 self.updateRoot()
171 else:
172 self.root = RBTreeNode(data)
173 self.root.color = 'black'
174
175 def updateRoot(self):
176 """Update root node when root changes"""
177 n = self.root.parent
178 while n:
179 if n.parent:
180 n = n.parent
181 else:
182 break
183 if n:
184 self.root = n
185
186 def Print(self):
187 if self.root == None:
188 print "Empty"
189 else:
190 self.root.Print(1)
191 def buildRBTree():
192 tree = RBTree()
193 for i in range(10):
194 tree.insert(i)
195 tree.Print() |
ЭМ
ЭМЕФБэЪОКЭЫбЫї
ЭМ,G=(V,E) ,ЕФБэЪОСНжжЗНЗЈ, СкНгБэКЭСкНгОиеѓ. СНепИїгаРћБз, ЖМПЩвдЪЪгУгкгаЯђЭМ, ЮоЯђЭМ, МгШЈЭМ
СкНгБэ , зюГЃгУЕФБэЪОЗНЗЈ, ЪЪгУгкЯЁЪшЭМЛђБШНЯаЁЕФЭМ, ПеМфИДдгЖШЮЊ(V+E), гХЕуЪЧМђЕЅ,ПеМфКФЗбаЁ, ШБЕуОЭЪЧШЗЖЈБпЪЧЗёДцдкаЇТЪЕЭ
СкНгОиеѓ , гУгкГэУмЭМЛђашвЊбИЫйХаЖЯСНЕуМфБпДцдкЕФГЁОА, ПеМфИДдгЖШЮЊ(V2 ), гХЕуЪЧХаЖЯБпДцдкЮЪЬтПь, ШБЕуОЭЪЧПеМфКФЗбБШНЯДѓ, ЪЧвЛжжгУПеМфЛЛЪБМфЕФЗНЗЈ. гааЉЖдПеМфЕФгХЛЏ, БШШчЖдгкЮоЯђЭМ, ОиеѓЪЧЖдГЦЕФ, ЫљвджЛашвЊДцДЂвЛАы. ЖдгкЗЧМгШЈЭМ, УПИіБпжЛашвЊгУ1bitДцДЂ.
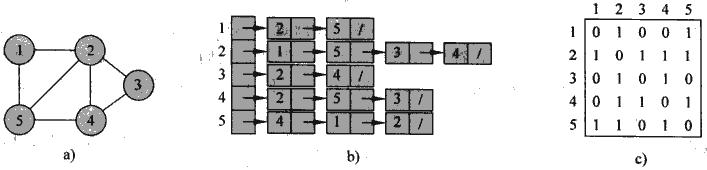
ФЧУДгУpythonдѕУДБэЪОЭМ, УЛгагябджБНггаЭМетбљЕФЪ§ОнНсЙЙ, ВЛЙ§ЖдгкpythonЖјбд, ЭЈЙ§зжЕфМгЩЯlistПЩвдКмШнвзЕФБэЪОЭМ(http://www.python.org/doc/essays/graphs.html), Р§згШчЯТ
1 #A -> B
2 #A -> C
3 #B -> C
4 #B -> D
5 #C -> D
6 #D -> C
7 #E -> F
8 #F -> C
9 graph = {'A': ['B', 'C'],
10 'B': ['C', 'D'],
11 'C': ['D'],
12 'D': ['C'],
13 'E': ['F'],
14 'F': ['C']} |
ЭМЕФЫбЫїЗНЗЈ ЗжЙуЖШгХЯШ КЭЩюЖШгХЯШ СНжж, етЪЧзюЛљБОЕФЭМЫуЗЈ, вВЪЧЭМЫуЗЈЕФКЫаФ. ЦфЫћЕФЭМЫуЗЈвЛАуЖМЪЧЛљгкЭМЫбЫїЫуЗЈЛђЪЧЫќЕФРЉГф.
ЙуЖШгХЯШЫбЫї (breadth-first search)
ЙуЖШгХЯШЪЧзюМђЕЅЕФЭМЫбЫїЫуЗЈжЎвЛ, вВЪЧаэЖрживЊЕФЭМЫуЗЈЕФдаЭ. дкPrimзюаЁЩњГЩЪїЫуЗЈКЭDijkstraЕЅдДзюЖЬТЗОЖЫуЗЈжа, ЖМВЩгУСЫРрЫЦЕФЫМЯы.
ЙЫУћЫМвх, ИјЖЈвЛИідДЖЅЕуs, ЙуЖШгХЯШЫуЗЈЛсбиЦфЙуЖШЗНЯђЯђЭтРЉеЙ, МДЯШЗЂЯжКЭsОрРыЮЊkЕФЫљгаЖЅЕу, ШЛКѓВХЗЂЯжКЭsОрРыЮЊk+1ЕФЫљгаЖЅЕу.
ЯдШЛетбљЕФЫбЫїЗНЪН, АДееНкЕуБЛЗЂЯжЕФЫГађ, зюжеЛсЩњГЩвЛПУЪї, ГЦжЎЮЊЙуЖШгХЯШЪї , УПИіНкЕужСЖрБЛЗЂЯжвЛДЮ(ЕквЛДЮ, КѓУцдйБщРњЕНОЭВЛЫуСЫ), НіЕБНкЕуБЛЗЂЯжЪБ, ЫћЕФЧАЧїНкЕуЮЊЫћЕФИИНкЕу, ЫљвдЙуЖШгХЯШЪїгжаЮЪНЛЏЕФГЦЮЊИУЭМЕФЧАЧїзгЭМ .
ЮвУЧЛЙПЩвджЄУї, дкЙуЖШгХЯШЪї, ШЮвтНкЕуЕНдДЖЅЕуsЕФОрРы(ЪїИп)ЮЊЫћУЧжЎМфЕФзюЖЬОрРы .
етИіКмШнвзжЄУї, МйЩшдкЙуЖШгХЯШЪїЩЯИУНкЕуnЕНsЕФОрРыЮЊk, ЖјnЕНsЕФзюЖЬОрРыЮЊk-1.
гЩгкЪЧЙуЖШгХЯШЫбЫї, БиаывЊЯШЗЂЯжКЭsОрРыЮЊk-1ЕФЫљгаЖЅЕу, ШЛКѓВХЛсШЅЗЂЯжКЭsОрРыЮЊkЕФЖЅЕу, ЫљвдВњЩњУЌЖм, дкЙуЖШгХЯШЪїЩЯОрРыгІИУЪЧk-1, ЖјВЛПЩФмЪЧk, ДгЖјЕУжЄетОЭЪЧзюЖЬОрРы.
ЫљвдЙуЖШгХЯШЫуЗЈПЩгУгкЧѓЭМжаСНЕуМф(a,b)ЕФЮоШЈзюЖЬТЗОЖ. ЗНЗЈЪзЯШвдaЮЊдДЧѓЧАЧїзгЭМ(МДЙуЖШгХЯШЪї), ШЛКѓдкЪїжаевЕНb, ВЛЖЯЧѓЦфЧАЧї, ЕНaЮЊжЙ, жаМфОЙ§ЕФНкЕуОЭЪЧЦфзюЖЬТЗОЖ. ШчЙћЮоЗЈДяЕНa, дђa,bМфВЛПЩДя.
ЪЕЯжШчЯТ, дкЪЕЯжBFSЫуЗЈЪБ, ЮвУЧашвЊгУЕНqueueЪ§ОнНсЙЙ, РДДцЗХШдашМЬајЫбЫїЕФНкЕу...
1 def BFS(graph, start):
2 parent = {start:None}
3 dist = {start:0}
4 queue = [start]
5
6 while queue:
7 v = queue.pop(0)
8 print v
9 e = graph[v]
10 for n in e:
11 if not parent.get(n) and not dist.get(n):
12 parent[n] = v
13 dist[n]= dist[v]+1
14 queue.append(n)
15 print n, parent[n], dist[n]
16 return parent
17
18 def shortestPath(parent, start, end):
19 if start == end:
20 print start
21 return
22 p = parent.get(end)
23 if not p:
24 print 'no path'
25 return
26 shortestPath(parent, start, p)
27 print end
28 if __name__ == "__main__":
29 graph = {'A': ['B', 'C','E'],
30 'B': ['A','C', 'D'],
31 'C': ['D'],
32 'D': ['C'],
33 'E': ['F','D'],
34 'F': ['C']}
35 p = BFS(graph,'A')
36 shortestPath(p, 'A', 'F') |
ЩюЖШгХЯШЫбЫї (Depth-first search)
ЩюЖШгХЯШЫбЫїЫљзёбЕФЫбЫїВпТдЪЧОЁПЩФмЁАЩюЁБЕиЫбЫїЭМЁЃдкЩюЖШгХЯШЫбЫїжаЃЌЖдгкзюаТЗЂЯжЕФЖЅЕуЃЌШчЙћЫќЛЙгавдДЫЮЊЦ№ЕуЖјЮДЬНВтЕНЕФБпЃЌОЭбиДЫБпМЬајККЯТШЅЁЃЕБНсЕуvЕФЫљгаБпЖММКБЛЬНбАЙ§ЃЌЫбЫїНЋЛиЫн ЕНЗЂЯжНсЕуvгаФЧЬѕБпЕФЪМНсЕуЁЃетвЛЙ§ГЬвЛжБНјааЕНвбЗЂЯжДгдДНсЕуПЩДяЕФЫљгаНсЕуЮЊжЙЁЃ
ЩюЖШгХЯШЫбЫїЫљвЊЛиД№ЕФЛљБОЮЪЬтЪЧ"What parts of the graph are reachable from a given vertex ", етЦфЪЕОЭЪЧРњЪЗгЦОУЕФУдЙЌЮЪЬт, дкШыПкЕуЪЧЗёПЩвдДяЕНГіПкЕу, етОЭЪЧЩюЖШгХЯШзюЛљБОЕФгІгУ. ПЦбЇРДдДгкЩњЛю, "Everybody knows that all you need to explore a labyrinth is a ball of string and a piece of chalk.", ЖдгкУдЙЌЮвУЧБиаыгаЗлБЪКЭЯпЭХ , ЗлБЪЪЧгУРДБъМЧзпЙ§ЕФТЗ, ЗРжЙЯнШыcycle, ЯпЭХЪЧгУРДзМШЗЕФЛиЫнЕНЩЯвЛИіТЗПк.
ФЧУДдѕУДгУГЬађРДФЃФтЗлБЪКЭЯпЭХРДЪЕЯжЩюЖШгХЯШЫбЫї, ЗлБЪКмШнвзНтОі, ЖдУПИіНкЕугУ0/1РДБэЪОЪЧЗёвбЗУЮЪ. ЖјЯпЭХОЭашвЊгУstackРДБэЪО, pushОЭЪЧunwind, popОЭЪЧrewind, ЪЧВЛЪЧКмгавтЫМ. ЛљгкетИіЫМТЗШЮКЮУдЙЌЖМЪЧПЩНтЕФ. ЖјЭљЭљstackвВЪЧгУвўаЮЕФЗНЪНРДЪЕЯжЕФ, ЭЈЙ§КЏЪ§ЕнЙщ. ЮвЯТУцЕФЪЕЯжМДИјГіСЫЕнЙщКЏЪ§ЕФЪЕЯж, вВИјГіСЫжБНггУstackЕФЪЕЯж, ИќЧхЮњЕФПДГіchalkЕФЪЙгУЗНЪН.
1 pre = {}
2 post = {}
3 clock = 1
4 stack = []
5 def DFS(graph):
6 global pre
7 for v in graph.keys():
8 if not pre.get(v):
9 visit_stack(graph, v)
10
11 def visit(graph, v):
12 global pre
13 global post
14 global clock
15 pre[v] = clock
16 clock = clock + 1
17 print v, pre[v]
18 edges = graph[v]
19 for e in edges:
20 if not pre.get(e):
21 visit(graph, e)
22 post[v] = clock
23 clock = clock + 1
24 print v, pre[v], post[v]
25
26 def visit_stack(graph, v):
27 """
28 use stack to replace recursion
29 """
30 global pre
31 global post
32 global clock
33 global stack
34 stack.append(v)
35 while stack:
36 print stack
37 next = stack.pop()
38 print 'pop:', next
39 while next:
40 if not pre.get(next):
41 pre[next] = clock
42 clock = clock + 1
43 print next, pre[next]
44 edges = graph.get(next)
45 vec = get_white_v(edges)
46 if vec:
47 print 'push:', next
48 stack.append(next)
49 else:
50 post[next] = clock
51 clock = clock + 1
52 print next, pre[next], post[next]
53 next = vec
54
55 def get_white_v(edges):
56 global pre
57 for e in edges:
58 if not pre.get(e):
59 return e
60 return None |
вРОнЩюЖШгХЯШЫбЫїПЩвдЛёЕУгаЙиЭМЕФНсЙЙЕФДѓСПаХЯЂЁЃЩюЖШгХЯШЫбЫїЫљвЊНтОіЕФЛљБОЮЪЬтЪЧПЩДяадЮЪЬт, МДСЌЭЈадЮЪЬт, ЭЈЙ§етИіЫуЗЈ, ЮвУЧПЩвдЧсЫЩЕФевЕНЫљгаСЌЭЈзгЭМ , ЖдгкУПИізгЭМПЩвдЩњГЩвЛИіЩюЖШгХЯШЪї, ДгЖјЩюЖШгХЯШЫбЫїзюжеВњЩњЕФЪЧЩюЖШгХЯШЩСж .
Г§ДЫжЎЭт, ЩюЖШгХЯШЫбЫїЛЙФмЕУЕНЕФКмживЊЕФаХЯЂЪЧ, for each node, we will note down the times of two important events, the moment of first discovery (corresponding to previsit ) and that of final departure (postvisit ). МДдкЕквЛДЮЗЂЯжИУНкЕу, КЭЭъГЩИУНкЕуЫљгаЯрСкНкЕуБщРњЪБ, МЧЯТСНИіЪБМфДС(ШчЯТЭМ).
ШЛКѓЛљгкprevisitКЭpostvisit, ОЭгавЛаЉгаШЄЕФЭЦТл,
1. згЪїЕФдДЕувЛЖЈЪЧprevisitзюаЁ, ЖјpostvisitзюДѓ, вђЮЊЪЧЕнЙщ, зюЯШПЊЪМЕФзюКѓЭъГЩ.
2. ЖдгкСНИіНкЕуu,v, ШчЙћДцдкКѓвсКЭзцЯШЕФЙиЯЕ, ФЧУДзцЯШЧјМф(pre(u),post(u))БиЖЈАќКЌКѓвсЧјМф(pre(v),post(v)). ШчЙћu,vСНИіЧјМфУЛгаАќКЌЙиЯЕ(ЭъШЋЗжРыЕФ), ФЧОЭвЛЖЈВЛДцдкКѓвсзцЯШЙиЯЕ.
3. ЭМжаЕФБпгЩДЫвВПЩвдЗжЮЊМИРр,
ЪїжІ (tree)ЃЌЪЧЩюЖШгХЯШЩСжжаЕФБпЃЌШчЙћНсЕуvЪЧдкЬНбАБп(u,v)ЪБЕквЛДЮБЛЗЂЯжЃЌФЧУДБп(u,v)ОЭЪЧвЛИіЪїжІЁЃ
ЗДЯђБп (back)ЃЌЪЧЩюЖШгХЯШЪїжаСЌНсНсЕуuЕНЫќЕФзцЯШvЕФФЧаЉБпЃЌЛЗвВБЛШЯЮЊЪЧЗДЯђБпЁЃ
е§ЯђБп (forward)ЃЌЪЧжИЩюЖШгХЯШЪїжаСЌНгЖЅЕуuЕНЫќЕФКѓвсЕФЗЧЪїжІЕФБпЁЃ
НЛВцБп (cross)ЃЌЪЧжИЫљгаЦфЫћРраЭЕФБп, МДСНИіНкЕуЕФЧјМфЭъШЋЗжРы.
етбљОЭПЩвдв§ГіЩюЖШгХЯШЫбЫїЕФЕкЖўИігІгУ, гаЯђЮоЛЗЭМ(Directed acyclic graphs, Dags)ЕФЭиЦЫХХађЮЪЬт
Dags are good for modeling relations like causalities(вђЙћЙиЯЕ), hierarchies(ВуМЖЙиЯЕ), and temporal dependencies(ЪБМфвРРЕЙиЯЕ).
етИідкШеГЃЩњЛюжаОГЃЛсХіЕНетбљЕФЧщПі, вЛЖбЪТЧщжЎМфгавђЙћ, ЪБМфЙиЯЕ, ЯШзіЫ, КѓзіЫ, етИіОЭЪЧЕфаЭЕФЭиЦЫХХађЮЪЬт.
ЯТУцЕФЭМПЩвдИјГівЛИіДЉвТЗўЕФР§зг,
ЭиЦЫХХађЕФЪЕЯжКмМђЕЅ, гаСНжжЫМТЗ,
1. ЖдЭМЭъГЩЩюЖШгХЯШЫбЫї, ШЛКѓАДНкЕуЕФpostvisitЕнМѕХХСаОЭЕУЕНСЫЭиЦЫХХађ.
2. ЕкЖўжжЫМТЗВЛвРРЕгкpostvisit, ЪзЯШбЁдёвЛИіЮоЧАЧ§ЕФЖЅЕуЃЈМДШыЖШЮЊ0ЕФЖЅЕуЃЌЭМжажСЩйгІгавЛИіетбљЕФЖЅЕуЃЌЗёдђПЯЖЈДцдкЛиТЗЃЉЃЌШЛКѓДгЭМжавЦШЅИУЖЅЕувдМАгЩЫћЗЂГіЕФЫљгагаЯђБпЃЌШчЙћЭМжаЛЙДцдкЮоЧАЧ§ЕФЖЅЕуЃЌдђжиИДЩЯЪіВйзїЃЌжБЕНВйзїЮоЗЈНјааЁЃШчЙћЭМВЛЮЊПеЃЌЫЕУїЭМжаДцдкЛиТЗЃЌЮоЗЈНјааЭиЦЫХХађЃЛЗёдђвЦГіЕФЖЅЕуЕФЫГађОЭЪЧЖдИУЭМЕФвЛИіЭиЦЫХХађЁЃ
ЧАУцЬжТлЕФЮоЯђЭМЕФСЌЭЈад, ЖдгкгаЯђЭМЕФСЌЭЈадЮЪЬт, ИќМгИДдгвЛЕу, ЖдгкгаЯђЭМБиаыЛЅЯрПЩДя, ВХШЯЮЊЪЧСЌЭЈЕФ.
дкгаЯђЭМGжаЃЌШчЙћШЮвтСНИіВЛЭЌЕФЖЅЕуЯрЛЅПЩДя ЃЌдђГЦИУгаЯђЭМЪЧЧПСЌЭЈ ЕФЁЃгаЯђЭМGЕФМЋДѓЧПСЌЭЈзгЭМГЦЮЊGЕФЧПСЌЭЈЗжжЇ ЁЃ
АбгаЯђЭМЗжНтЮЊЧПСЌЭЈЗжжЇЪЧЩюЖШгХЯШЫбЫїЕФвЛИіОЕфгІгУЪЕР§. КмЖргаЙигаЯђЭМЕФЫуЗЈЖМДгЗжНтВНжшПЊЪМЃЌетжжЗжНтПЩАбдЪМЕФЮЪЬтЗжГЩЪ§ИізгЮЪЬтЃЌЦфжаУПИізгзгЮЪЬтЖдгІвЛИіЧПСЌЭЈЗжжЇЁЃЙЙдьЧПСЌЭЈЗжжЇжЎМфЕФСЊЯЕвВОЭАбзгЮЪЬтЕФНтОіЗНЗЈСЊЯЕдквЛЦ№ЃЌЮвУЧПЩвдгУвЛжжГЦжЎЮЊЗжжЇЭМЕФЭМРДБэЪОетжжЙЙдь, ЖјЗжжЇЭМвЛЖЈЪЧdags.
ЭЈЙ§ЩюЖШгХЯШЫбЫїРДАбгаЯђЭМЗжНтЮЊЧПСЌЭЈЗжжЇЕФЗНЗЈвВКмМђЕЅ,
procedure Strongly_Connected_Components(G);
begin
1.ЕїгУDFS(G)вдМЦЫуГіУПИіНсЕуuЕФЭъГЩЪБПЬpost[u];
2.МЦЫуГіGT ;
3.ЕїгУDFS(GT )ЃЌЕЋдкDFSЕФжїбЛЗРяАДеыpost[u]ЕнМѕЕФЫГађПМТЧИїНсЕу(КЭЕквЛаажавЛбљМЦЫу);
4.ЪфГіЕк3ВНжаВњЩњЕФЩюЖШгХЯШЩСжжаУППУЪїЕФНсЕуЃЌзїЮЊИїздЖРСЂЕФЧПСЌЭЈжЇЁЃ
end;
ЮЊЪВУДетбљОЭПЩвдевЕНЧПСЌЭЈЗжжЇ, ДгЩЯУцЕФЭМПЩжЊ, ЭМгызЊжУЭМЕФЧПСЌЭЈЗжжЇЪЧвЛбљЕФ. ЯШЖдGЭъГЩDFS, ШЛКѓАДpostЕнМѕЕФЫГађ,
ЯждкЛљгкЗжжЇЭМРДПМТЧ, ЗжжЇЭМЪЧdag, ЫљвдЦфЪЕЧѓЧПСЌЭЈЗжжЇКЭЭиЦЫХХађЕФЫМТЗгааЉЯрЫЦ, ЯШDFS(G), ВЂАДpostЕнМѕЕФХХађ, ЦфЪЕОЭЪЧАбЗжжЇ(component)НјааСЫЭиЦЫХХађ, ШчЙћЮвУЧФмЙЛевЕНЕквЛИіЧПСЌЭЈЗжжЇ, АбЫќЩОГ§, дйМЬајЭљЯТвЛИіИіПЩвдевГіЫљгаЕФЧПСЌЭЈЗжжЇ.
ЮЊЪВУДвЊАДЭиЦЫХХађЕФЫГађев, вђЮЊЗжжЇЭМРяУцpostзюДѓЕФФЧИіЗжжЇ, жЛгаГіЖШЮоШыЖШ, ЕБШЁЭМЕФзЊжУЭМЪБ, ОЭБфГЩСЫУЛгаГіЖШ, ЫљвдЖдзЊжУЭМНјааЩюЖШгХЯШЫбЫїВЛЛсевЕНЦфЫћЗжжЇЕФНкЕу, ПЩвдзМШЗЕФевГіЪєгкЕквЛИіЧПСЌЭЈЗжжЇЕФЫљгаНкЕу. ЫљвдЩЯУцЫуЗЈжа, ЖдзЊжУЭМАДpostЕнМѕНјааЩюЖШгХЯШЫбЫїОЭПЩвдАДЗжжЇЭМЕФЭиЦЫЫГађевГіЫљгаЧПСЌЭЈЗжжЇ.
1 def transpose(graph):
2 """
3 create transposed graph
4 """
5 t_graph = {}
6
7 for key, edges in graph.items():
8 for edge in edges:
9 if not t_graph.get(edge):
10 t_graph[edge] = [key]
11 else:
12 t_graph[edge].append(key)
13 #print t_graph
14 return t_graph
15 def SCC(graph):
16 """
17 Strongly_Connected_Components
18 """
19 global post
20 global pre
21 global clock
22 DFS(graph)
23 p = post.items()
24 p.sort(key=lambda x:x[1],reverse=True)
25 print p
26 t_graph = transpose(graph)
27 post = {}
28 pre = {}
29 clock = 1
30 for v,num in p:
31 if not pre.get(v):
32 print v, '=========================='
33 visit(t_graph, v) |
ЙуЖШКЭЩюЖШгХЯШЫбЫїЕФЧјБ№
ЖдгкетСНжжЫуЗЈЛљБОЕФФПЕФЖМЪЧвЊБщРњЫљгаНкЕувЛДЮ, ЫљвдЪБМфИДдгЖШЪЧвЛжТЕФO(V+E)
СНепдкЪЕЯжЩЯЮЈвЛЕФЧјБ№ЪЧ, BFSЪЙгУQueue, ЖјDFSЪЙгУStack, етОЭЪЧСНепЫљгаЧјБ№ЕФИљдД, QueueЕФЯШНјЯШГіЬиадШЗБЃСЫжЛгаЩЯвЛВуЕФЫљгаНкЕуЖМБЛЗУЮЪЙ§, ВХЛсПЊЪМЗУЮЪЯТВуНкЕу, ДгЖјБЃжЄСЫЙуЖШгХЯШ, ЖјStackЕФЯШНјКѓГіЕФЬиад, ЛсДгвЖНкЕуВЛЖЯЛиЫн, ДгЖјДяЕНЩюЖШгХЯШ.
СНепгІгУГЁОАВЛЭЌ, BFSБШНЯМђЕЅ, жївЊгУгкЧѓзюЖЬТЗОЖ, DFSИДдгаЉ, жївЊгУгкgraph decomposition, МДдѕбљАбвЛИіЭМЗжНтГЩЯрЛЅСЌЭЈЕФзгЭМ, ЦфжаАќКЌСЫгаЯђЭМЕФЭиЦЫХХађЮЪЬт. |