| 编辑推荐: |
本文主要介绍了基于OPM的无人机集群智能化指挥控制概念模型相关内容。希望对你的学习有帮助。
本文来源于微信公众号武警研究院,由火龙果软件Linda编辑,推荐。 |
|
本文基于对象过程方法论,面向无人机集群作战指挥控制军事需求,针对无人机集群智能化指挥控制流程优化问题,构建了无人机集群智能化指挥控制军事概念模型。以无人机集群作战任务为核心,分析了集群作战智能化指挥控制主要流程,基于OPM建立了集群作战智能化指挥控制概念模型,利用人工智能技术优势加快OODA环循环,推动实现自主高效精准的指挥控制。
1 无人机集群智能化指挥控制流程及建模方法
1.1 无人机集群智能化指挥控制流程
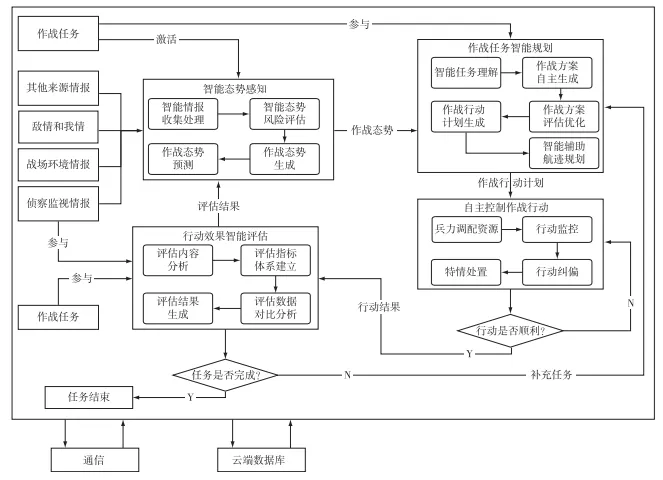
无人机集群智能化指挥控制目的是解析作战任务,制定作战方案计划,实施集群精准控制,以及开展作战效果实时评估,通过创造指控优势实现战场胜势。很多学者对智能化指挥控制开展了研究。李健等提出了陆军智能化作战指挥模式组织功能结构图和工作流程图;梁荣晓等设计提出了联合火力打击智能化规划支撑作战筹划和作战指挥的工作流程;符拯等基于决策循环理论,构建了在线规划功能模型。本文借鉴以上研究理论,设计了无人机集群智能化指挥控制工作流程,如图1所示,主要包括4个关键活动:智能态势感知、作战任务智能规划、自主控制作战行动、行动效果智能评估。
图1 无人机集群智能化指挥控制工作流程
(1)智能态势感知
在智能态势感知阶段,主要任务是完成对无人机集群作战态势的感知。利用深度学习技术、多源情报融合技术等对多源情报进行综合分析处理,完成对战场态势的智能化感知、分析、风险评估和态势预测,进行可视化呈现和上传,为无人机集群作战任务智能规划提供依据。该阶段建模难点主要在于如何实现态势智能感知、预测和生成,以及设计实现模型的动态实时更新。
(2)作战任务智能规划
在作战任务智能规划阶段,主要任务是完成对作战方案的生成和优化。通过智能任务理解过程对作战任务进行解析,生成作战任务清单。利用智能方案生成技术自主生成多套作战方案,通过对方案进行评估、选择和优化,最后生成无人机集群作战行动计划和飞行航线。该阶段建模难点主要在于如何实现作战任务的理解、分解,进而实现“任务-能力-兵力”的科学调配以及方案的生成和优化。
(3)自主控制作战行动
在自主控制作战行动阶段,无人机集群在智能控制算法的运行控制下,自主实现防撞、智能导航飞行、目标识别判断、目标跟踪、目标干扰打击等行动。该阶段分为两种情况:①在任务执行顺利情况下完成作战任务;②在遭受敌方干扰、打击等异常情况下,由集群开展自主决策,调控作战行动,继续执行任务。该阶段建模难点主要在于特情的处置,确保作战任务的顺利实施。
(4)行动效果智能评估
在行动效果智能评估阶段,通过无人机多源侦察情报对行动效果进行评估,并将评估结果融入态势感知中。行动效果评估结果直接影响无人机集群下一步作战行动。如果评估结果为任务未完成,则进入补充任务阶段,根据评估结果启动任务规划,开展下一阶段行动。该阶段建模难点主要在于如何建立评估指标体系以及智能评估方法的选取,实现评估的科学性。
1.2 模型构建方法及创新性
以色列理工学院的Dori教授在2002年提出了对象过程方法论,即OPM(object-process
methodology)。目前已经有诸多文献对OPM建模的基本元素、连接关系、表现方式等进行了详细的介绍,这里不再赘述。本文主要结合OFUS建模方法阐述无人机集群智能化指挥控制概念建模优势。
Dori教授在2016年提出了运行功能统一规范建模方法,即OFUS(operational-functional
unified specification),如图2所示,包络系统(enveloping system,ES)由系统和环境组成。运行过程是包络系统场景运用的体现,它由一个或多个系统依赖的场景组成。这些场景包括系统内部活动和外部环境活动。系统活动在子系统功能的支撑下得以实现。图3是Dori教授提出的通用任务的OFUS图,该图显示了任务系统除了本身执行一些任务外,还支持任务部队、任务计划或者其他子系统执行作战场景任务。
图2 OFUS建模方法的OPD图
图3 通用任务的OFUS图
无人机集群作战是以任务为核心开展的行动。相比于ER、IDEF、Petri网、SysML、UML等的建模语言和方法,采用基于OPM的OFUS建模方法对无人机集群智能化指挥控制进行概念建模,可以实现在一个连贯、统一和协同的模型中结合作战行动场景的运行,完善系统功能的设计。主要有以下优点:
(1) 统一模型与简化复杂性。采用该建模方法能够将无人机集群作战的智能态势感知、作战任务智能规划、作战行动自主控制、行动效果智能评估等关键环节以及他们之间的交互(过程)集成到同一个模型中,打破传统建模中线性思维和分离局限。此外,通过明确定义集群智能化指挥控制对象和过程以及它们之间的关系,简化系统的复杂性。这种集成化概念建模的创新之处在于它提供了一个统一的框架来描述和分析无人机集群智能化指挥控制的复杂性,从而提高了建模的效率和准确性。
(2) 将功能与程序分开设计。传统建模中,在详细描述和设计无人机集群指挥控制概念模型时,很难将与任务相关的作战任务场景和系统功能区分开来。而该建模方法能够实现无人机集群作战场景和系统功能分开设计,通过定义功能和场景解决了建模过程中程序与功能分不清的问题,使建模人员更专注于集群智能化指挥控制的概念建模。对作战场景进行单独设计也使得集群智能化指挥控制更具有针对性和专业性。此外,还能在设计作战场景的同时完善作战场景支撑功能,从下向上地形成系统功能集,使建模人员更快、更清楚地了解集群智能化指挥控制功能需求。
(3) 模型的检验与优化。OPM能够全面地描述无人机集群智能化指挥控制过程中的各种活动和逻辑关系,在模型构建完成后,可以通过OPCAT软件的推演功能对模型进行推演观察。通过观察模型系统中的实体动态变化、状态转换、过程进度、资源消耗情况、输出结果等,能够直观地发现模型的不合理之处,对模型的系统性和正确性进行检验,从而对模型进行再完善。
2 无人机集群智能化指挥控制概念模型框架
2.1 无人机集群智能化指挥控制概念模型顶层视图
采用OFUS建模方法,结合通用任务的OFUS图和无人机集群作战有关流程,对无人机集群智能化指挥控制进行概念建模。通过智能态势感知、作战任务智能规划、自主控制作战行动、行动效果智能评估等智能化过程实现集群作战的态势分析、作战方案生成、作战行动控制、作战结果评估,缩短OODA环循环时间,提高指挥控制效率。
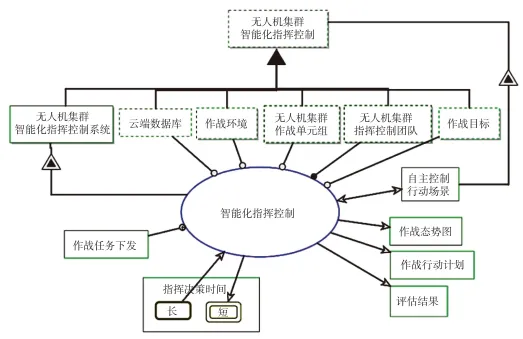
如图4所示,无人机集群智能化指挥控制概念模型顶层视图主要由物理实体(无人机集群作战单元组、无人机集群指挥控制团队、作战环境、作战目标)、过程执行(智能化指挥控制)、信息实体(作战态势图、云端数据库、作战行动计划、评估结果)构成。无人机集群指挥控制团队通过代理连接与智能化指挥控制过程相连,表示该过程由该团队组织实施。作战环境作战目标、云端数据库通过工具连接与智能化指挥控制过程相连,表示执行该过程需要以上实体对象的参与。作战任务下发通过触发连接与智能化指挥控制过程相连,表示该过程由作战任务激活。作战态势图、评估结果和作战行动计划通过结果连接与智能化指挥控制过程相连,表示该过程生成战场态势图、评估结果和作战行动计划。自主控制作战场景通过影响连接与智能化指挥控制过程相连,表示它们之间相互影响。作战决策时间有状态“长”和“短”,并通过消耗/结果连接与智能化指挥控制过程相连,表示通过该过程运作,缩短了作战指挥决策时间,提高集群作战指挥控制效率。
图4 概念模型顶层视图
2.2 无人机集群智能化指挥控制概念模型SD1级视图
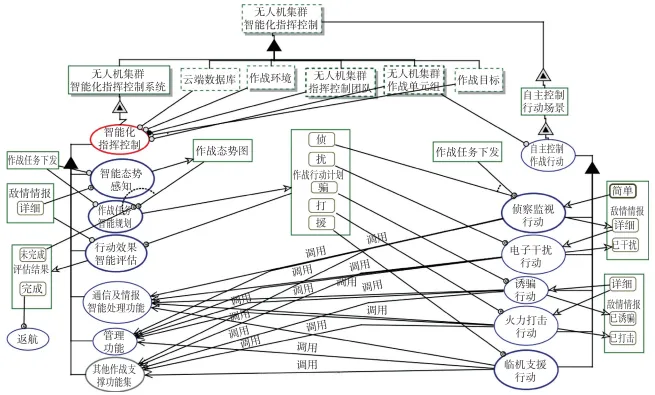
无人机集群智能化指挥控制整个过程由多个子过程组成,将其分解细化以体现其内部和外部的关联。如图5所示,下发的作战任务激活无人机集群侦察监视行动,并对敌展开侦察监视,将敌情情报状态由简单(战前拥有的基础情报)转变为详细(敌方详细部署、装备参数、活动情况等情报)。详细状态的敌情触发智能态势感知过程更新作战态势图,随着集群侦察情报的实时上传,作战态势图实时更新,并引发作战行动计划的修正,直至任务完成。行动效果智能评估过程根据作战行动计划生成评估指标体系,并通过多源侦察情报完成评估活动。如果评估结果为完成则集群返航,否则触发新一轮的作战任务智能规划,继续执行任务。各个自主控制作战行动场景的行动过程都会伴随着敌情情报状态转变,比如火力打击行动将敌情情报状态由详细转变为已打击,表示火力打击行动已执行完毕。而云端数据库、作战环境、无人机集群指挥控制团队、无人机集群作战单元组、作战目标则参与到各个过程中,助推各个过程和功能顺利实现。
图5 概念模型SD1视图
2.3 无人机集群智能化指挥控制概念模型SD2级视图
多位学者在智能态势感知、作战任务规划、作战任务评估等领域开展了深入的研究。王明程等为提高安全风险监测预警能力提出了基于多模态大数据的国家安全风险态势感知模型;杜伟伟等总结提出了战术级任务规划的方法框架,重点阐述了战术级任务规划主要实现方法;李江涛等研究提出了联合作战方案仿真实验评估框架工作流程和数据流转框架,为组织实施仿真实验活动和构建开发仿真实验系统提供理论和方法。本文在以上研究的基础上,结合无人机集群智能化指挥控制流程,构建其智能态势感知、作战任务智能规划、行动效果智能评估SD2级概念模型。
智能态势感知过程如图6所示,在多源情报和战场环境数据库的参与下,无人机集群侦获的详细敌情触发智能态势感知过程。该过程可以划分为5个阶段:一是情报收集及数据标准化处理,该阶段将有关无人机集群作战的敌情、我情、战场环境数据全部做标准化处理,生成人工智能可以直接处理的标准化数据集;二是数据智能融合共享,将处理后的标准化数据进行初步融合、关联、分析,生成集群作战态势数据集,并将态势数据分享、储存,同步更新云端数据库;三是态势智能理解,对集群作战态势数据进行风险评估、威胁排序、战场静态、动态情况分析和综合分析研判,生成时-空-频-能-网的五维态势图;四是态势智能预测,在战场五维态势图的参与下,在多种智能预测技术支撑下,进行集群作战态势预测,为无人机集群作战指挥控制提供未来视角;五是人机交互,实现态势图、数据、图表等的可视化和推送,生成无人机集群指挥需要的作战态势图。这些过程在左侧智能功能区的支撑下自主开展态势收集、分析、理解、评估、预测、可视化等工作,实现态势的智能感知。
图6 智能态势感知过程
作战任务智能规划过程主要目的是明确作战目标、生成作战行动计划和集群作战任务航线。整个过程细化为任务理解、方案生成、方案优化、计划生成、航迹规划5个子过程,如图7,在作战态势图或评估结果的触发下将无人机集群作战任务分解成元任务集,通过与作战任务数据库中集群任务字典比对分析,生成无人机集群作战任务清单。任务清单触发方案生成子过程,生成多个作战方案。作战方案评估优化子过程评选出最合适的作战方案并对其进行集群作战时间、空间、力量、航线等方面的优化,生成优化后的方案,增强作战方案的针对性和可行性。最后,计划生成过程和智能辅助航迹规划过程生成作战行动计划和无人机集群作战航迹。
图7 作战任务智能规划过程
行动效果智能评估过程主要目的是对无人机集群作战任务的完成度进行评估,为下一步行动提供判断依据。整个过程可以划分为数据标准化处理,建立评估指标体系以及评估判定三个阶段,如图8所示,作战行动计划触发数据预处理过程,将集群侦获的实时敌情处理成人工智能技术能够直接处理的标准化数据,同时方便后续对数据进行结果判定。根据标准化数据的内容,在智能评估技术方法数据库和评估指标体系表的参与下进行智能评估方法的选取和对应指标体系的建立。在完成评估体系的权重赋值后,通过作战目标标准化数据表与评估指标体系权重系数表的比对分析,生成无人机集群作战判定分值(取百分制,90分以上判定为完成),给出评估结果。
图8 行动效果智能评估过程
3 模型推演与验证
3.1 模型推演机理
OPCAT软件具有模型推演功能,可检验模型的逻辑性。图9(a)和(b)为启动推演前后状态,对比推演前后状态,除输入、输出以外的实体对象皆变为实心,表示实体对象运行正常。观察图9(c)和(d),输入逐渐变淡,输出逐渐变为实心,同时,正在运行的过程为实心,而箭头中间的红点表示该过程的产出,该现象表示过程、对象、链接运行正常,即模型符合逻辑。如果启动推演后,没有红点的流动或对象、过程底色不变,则表示模型某处逻辑不通畅或设计不合理。通过观察模型的运行状态,可以帮助建模人员快速找到逻辑设计的错误之处,从而完善和优化模型。
图9 模型推演过程
3.2 想定设计及推演过程
为了验证本文提出的无人机集群智能化指挥控制概念模型的可行性和合理性,以干扰岛礁雷达作战为例进行推演验证。作战想定设计如下:假设红方部队已经封锁某岛礁,计划对岛礁敌军进行轰炸,需要无人机集群部队对敌方警戒雷达、导弹制导雷达进行干扰。根据前期侦察情报,敌方雷达频率未知,警戒雷达部署在岛礁制高点轮流开机。
利用OPCAT4.2软件按照无人机集群智能化指挥控制模型进行推演,部分推演过程截图如图9,推演结果如图10。整个模型共运行了70步,从“对岛礁雷达干扰任务”下发开始,第3步对敌我态势进行智能分析,生成作战态势图,第11步开始智能态势理解,经过对无人机集群作战任务关键词提取、作战环境特征提取,与集群任务数据库和任务字典智能匹配后,第15步生成作战任务清单,包括:(1)对敌方雷达进行干扰;(2)对敌方雷达进行侦察;(3)获取敌方雷达警戒盲区;(4)侦察敌方守岛部队情况;(5)对敌方导弹制导雷达进行诱骗。
图10 生命周期表
生成的作战任务清单同步触发作战方案自主生成过程,对作战任务优先级进行排序,任务优先级顺序如下:5-2-3-4-1。经过“任务-能力-兵力-编组”智能匹配,产生兵力需求表(1个雷达侦察子群、1个诱饵无人机子群、1个光电侦察子群)。最后,经兵力冲突检测和行动序列规划,在第24步生成多个作战方案。
多个作战方案在第25步智能推演评估过程评选出最优方案,经过对敌方防御缺陷智能分析和针对性对策分析,根据分析结果进行“作战时间-作战频谱-集群运用-作战空间”的优化,随后在第33步生成作战行动计划,最后,利用智能航迹规划功能生成集群作战航迹。
作战行动计划在第34步触发自主侦察监视行动,无人机集群按照作战计划在智能算法控制下自主开展行动,使用诱饵无人机子群诱骗敌方导弹制导雷达开机,雷达侦察子群趁机对敌方雷达作战频率、作战样式、位置等参数进行侦察、记录、上传,光电侦察子群对敌方守岛部队活动情况进行侦察监视和上报。
第35步智能态势感知过程对上报的详细敌情智能分析后更新作战态势,进而生成无人机集群干扰作战方案,经过评估优化后生成集群干扰作战行动计划。第67步干扰子群开启自主作战行动,同时侦察监视行动继续开展敌方雷达盲区的探测,并将数据实时上报,上报的数据不断经过智能感知、方案生成、优化、航迹生成等过程,实时更新集群行动计划和飞行航迹,进而对敌方雷达进行持续干扰。侦察监视行动将实施干扰后敌方雷达频率活动、部署变化、信号强弱等情况上传,第69步进行行动效果智能评估,生成评估结果。
对推演结果进行分析,整个推演过程中,各实体对象全程存在,各个过程运行顺畅,正常产生预期结果。证明无人机集群智能化指挥控制概念模型建模逻辑合理可行。
4 结束语
本文围绕无人机集群智能化指挥控制概念模型的构建,研究提出了集群智能化指挥控制流程,结合OPM、OFUS建模方法的优势,采用OFUS建模方法构建了无人机集群智能化指挥控制概念模型,最后结合作战任务场景对构建的模型进行了推演验证,验证了模型合理可行。
|






 订阅
订阅