| БрМЭЦМі: |
БОЮФИХЪіСЫAUTOSARећЬхЫМТЗЃЌЗжВуЪНЩшМЦЕФећЬхПђМмЃЌзюКѓНВЪіСЫПЊЗЂЙЄОп,ЯЃЭћЖдФњгаЫљАяжњ
БОЮФРДдДгкcsdnЃЌгЩЛ№СњЙћШэМўDeloresБрМЃЌЭЦМі |
|
AUTOSARећЬхЫМТЗИХЪі
вЛЁЂзмЬхИХЪі
AUTOSARЪЧAutomotive Open System ArchitectureЃЈЦћГЕПЊЗХЯЕЭГМмЙЙЃЉЕФЪззжФИЫѕаДЃЌЪЧвЛМвжТСІгкжЦЖЈЦћГЕЕчзгШэМўБъзМЕФСЊУЫЁЃAUTOSARЪЧгЩШЋЧђЦћГЕжЦдьЩЬЁЂВПМўЙЉгІЩЬМАЦфЫћЕчзгЁЂАыЕМЬхКЭШэМўЯЕЭГЙЋЫОСЊКЯНЈСЂЃЌИїГЩдББЃГжПЊЗЂКЯзїЛяАщЙиЯЕЁЃзд2003ФъЦ№ЃЌИїЛяАщЙЋЫОаЏЪжКЯзїЃЌжТСІгкЮЊЦћГЕЙЄвЕПЊЗЂвЛИіПЊЗХЕФЁЂБъзМЛЏЕФШэМўМмЙЙЁЃAUTOSARетИіМмЙЙгаРћгкГЕСОЕчзгЯЕЭГШэМўЕФНЛЛЛгыИќаТЃЌВЂЮЊИпаЇЙмРэгњРДгњИДдгЕФГЕСОЕчзгЁЂШэМўЯЕЭГЬсЙЉСЫвЛИіЛљДЁЁЃДЫЭтЃЌAUTOSARдкШЗБЃВњЦЗМАЗўЮёжЪСПЕФЭЌЪБЃЌЬсИпСЫГЩБОаЇТЪЁЃ
ећГЕШэМўЯЕЭГПЩЭЈЙ§AUTOSARМмЙЙЖдГЕдиЭјТчЁЂЯЕЭГФкДцМАзмЯпЕФеяЖЯЙІФмНјааЩюЖШЙмРэЃЌЫќЕФГіЯжгаРћгкећГЕЕчзгЯЕЭГШэМўЕФИќаТгыНЛЛЛЃЌВЂИФЩЦСЫЯЕЭГЕФПЩППадКЭЮШЖЈадЁЃФПЧАжЇГжAUTOSARБъзМЕФЙЄОпКЭШэМўЙЉгІЩЬЖМвбОЭЦГіСЫЯргІЕФВњЦЗЃЌЬсЙЉашЧѓЙмРэЃЌЯЕЭГУшЪіЃЌШэМўЙЙМўЫуЗЈФЃаЭбщжЄЃЌШэМўЙЙНЈЫуЗЈНЈФЃЃЌШэМўЙЙМўДњТыЩњГЩЃЌRTEЩњГЩЃЌECUХфжУвдМАЛљДЁШэМўКЭВйзїЯЕЭГЕШЗўЮёЃЌАяжњOEMЪЕЯжЮоЗьЕФЯЕЭГШэМўМмЙЙПЊЗЂСїГЬЁЃ
AUTOSARМЦЛЎФПБъжївЊгаШ§ИіЃК
1ЃЉНЈСЂЖРСЂгкгВМўЕФЗжВуШэМўМмЙЙЃЛ
2ЃЉЮЊЪЕЪЉгІгУЬсЙЉЗНЗЈТлЃЌАќРЈжЦЖЈЮоЗьЕФШэМўМмЙЙЖбЕўСїГЬВЂНЋгІгУШэМўећКЯжСECUЃЛ
3ЃЉжЦЖЈИїжжГЕСОгІгУНгПкЙцЗЖЃЌзїЮЊгІгУШэМўећКЯБъзМЃЌвдБуШэМўЙЙМўдкВЛЭЌЦћГЕЦНЬЈИДгУЁЃ
ЖўЁЂЗжВуИХЪі
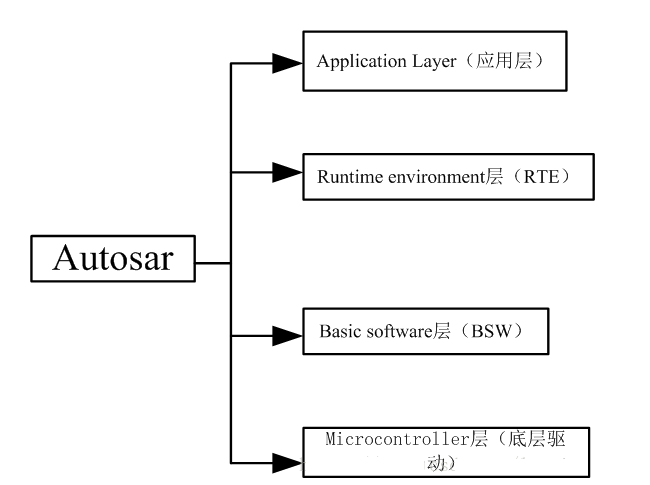
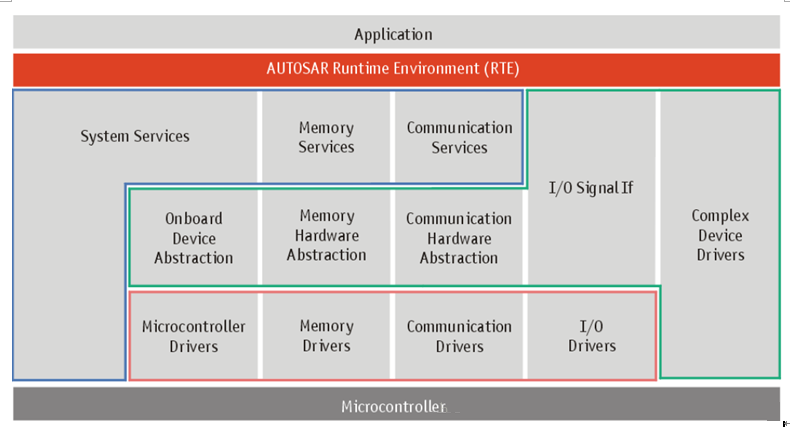
AUTOSARећЬхПђМмЮЊЗжВуЪНЩшМЦЃЌвджаМфМўRTE(Runtime Environment)ЮЊНчЃЌИєРыЩЯВуЕФгІгУВуЃЈApplication LayerЃЉгыЯТВуЕФЛљДЁШэМўЃЈBasic SoftwareЃЉЁЃЭМ1ЪЧAUTOSARЬхЯЕМмЙЙЗжВуБъзМЁЃ
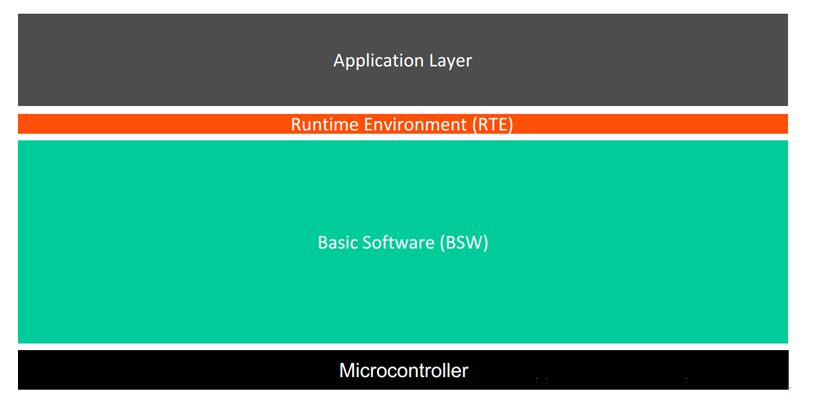
ЭМ 1 AUTOSARЬхЯЕМмЙЙЗжВуБъзМ
1ЁЂ Application LayerЃЈгІгУВуЃЉ
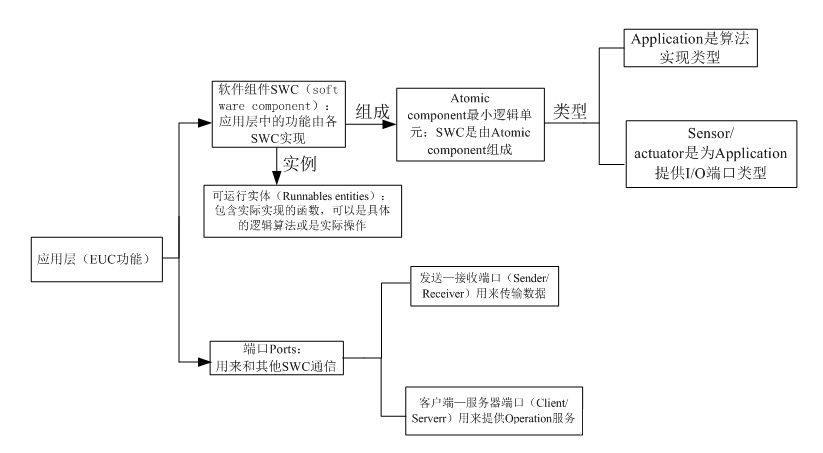
гІгУВужаЕФЙІФмгЩИїШэМўзщМўSWCЃЈsoftware componentЃЉЪЕЯжЃЌзщМўжаЗтзАСЫВПЗжЛђепШЋВПЦћГЕЕчзгЙІФмЃЌАќРЈЖдЦфОпЬхЙІФмЕФЪЕЯжвдМАЖдгІУшЪіЃЌШчПижЦДѓЕЦЃЌПеЕїЕШВПМўЕФдЫзїЃЌЕЋгыЦћГЕгВМўЯЕЭГУЛгаСЌНгЁЃ
1ЃЉ ШэМўзщМўSWCЃЈsoftware componentЃЉ
ШэМўзщМўSWCЃЈsoftware componentЃЉЪЧгЩAtomic componentзюаЁТпМЕЅдЊзщГЩЁЃAtomic componentзюаЁТпМЕЅдЊгаApplicationЁЂSensor/actuatorСНжжРраЭЁЃЦфжаApplicationЪЧЫуЗЈЪЕЯжРраЭЃЌФмдкИїECUЩЯздгЩгГЩфЃЛSensor/actuatorЪЧЮЊApplicationЬсЙЉI/OЖЫПкРраЭЃЌгУгкгыECUАѓЖЈЃЌЕЋВЛПЩЯёApplicationФЧбљФмдкИїECUЩЯздгЩгГЩфЁЃЪ§ИіSWCЕФТпММЏКЯзщКЯГЩCompositionЁЃЭМ2ЪЧSWCзщГЩЪЕР§ЁЃ
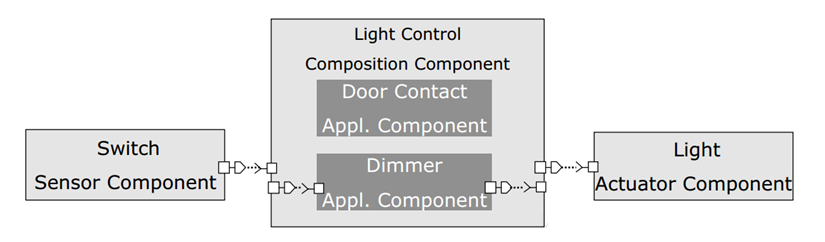
ЭМ 2
2ЃЉЖЫПкPorts
ЖЫПкPortsЪЧгУРДКЭЦфЫћSWCЭЈаХЁЃЭЈаХФкШнЗжЮЊData elementsгыoperationsЁЃЦфжаЃЌData elementsгУSender/ReceiverЭЈаХЗНЪНЃЛoperationsгУClient/ServerЭЈаХЗНЪНЁЃЭМ3ЪЧЭЈаХЗНЪН
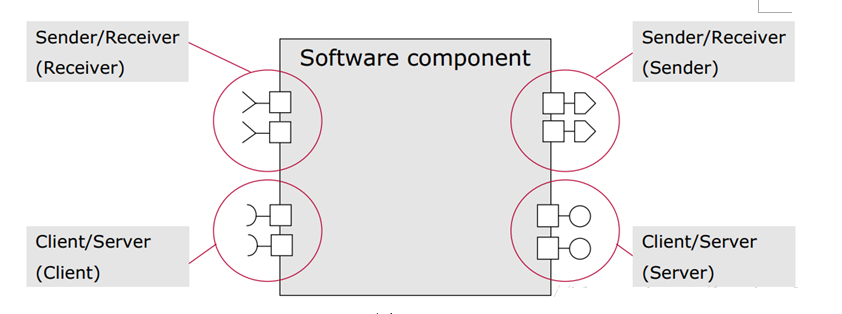
ЭМ3
ЗЂЫЭЁЊНгЪеЖЫПкЃЈSender/ReceiverЃЉгУРДДЋЪфЪ§ОнЃЌОпгавЛИіЭЈаХЖЫПкПЩвдАќКЌЖржжЪ§ОнРраЭЬиЕуЁЃЕЋШчЙћвЛИіЪ§ОнРраЭвЊЭЈЙ§змЯпДЋЪфЃЌФЧУДЫќБиаыгывЛИіаХКХЖдгІЦ№РДЃЌЪ§ОнРраЭМШПЩвдЪЧМђЕЅЕФЪ§ОнРраЭ(integer, float)ЃЌвВПЩвдЪЧИДдгРраЭ(array, record)ЁЃЭЈаХЗНЪН:1:nЛђn:1
ЭМ 4
ПЭЛЇЖЫЁЊЗўЮёЦїЖЫПкЃЈClient/ServerrЃЉгУРДЬсЙЉOperationЗўЮёЃЌОпгавЛИіПЭЛЇЖЫЁЊЗўЮёЦїЖЫПкПЩвдАќКЌЖржжOperationКЭЭЌВНЛђЪЧвьВНЭЈаХЬиЕуЃЌвЛИіПЭЛЇЖЫЁЊЗўЮёЦїЖЫПкПЩвдАќКЌЖржжOperationsВйзїЃЌOperationsВйзївВПЩБЛЕЅИіЕїгУЁЃЭЈаХЗНЪН:1:nЛђn:1ЁЃ 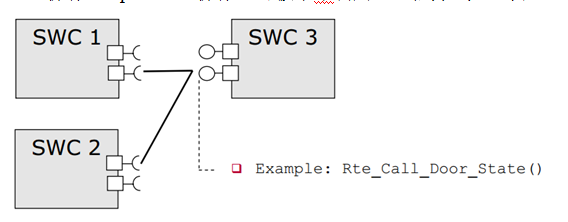
ЭМ 5
3ЃЉПЩдЫааЪЕЬхЃЈRunnables entitiesЃЉ
ПЩдЫааЪЕЬхЃЈRunnablesentitiesЃЉЃЌМђГЦRunnablesЁЃПЩдЫааЪЕЬхАќКЌЪЕМЪЪЕЯжЕФКЏЪ§ЃЌПЩвдЪЧОпЬхЕФТпМЫуЗЈЛђЪЧЪЕМЪВйзїЁЃПЩдЫааЪЕЬхгЩRTEжмЦкадЛђЪЧЪТМўДЅЗЂЕїгУЃЌШчЕБНгЪеЕНЪ§ОнЁЃ
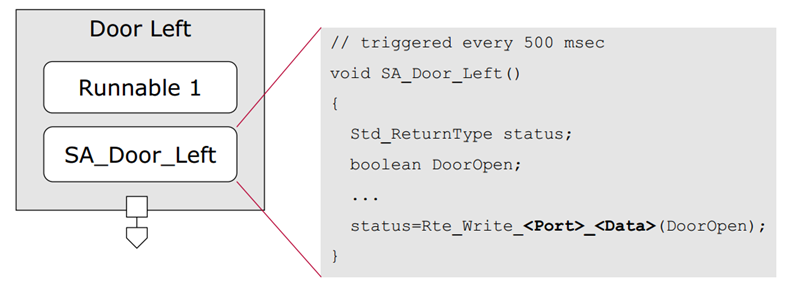
ЭМ 6
2ЁЂRuntime environmentВу ЃЈRTEЃЉ
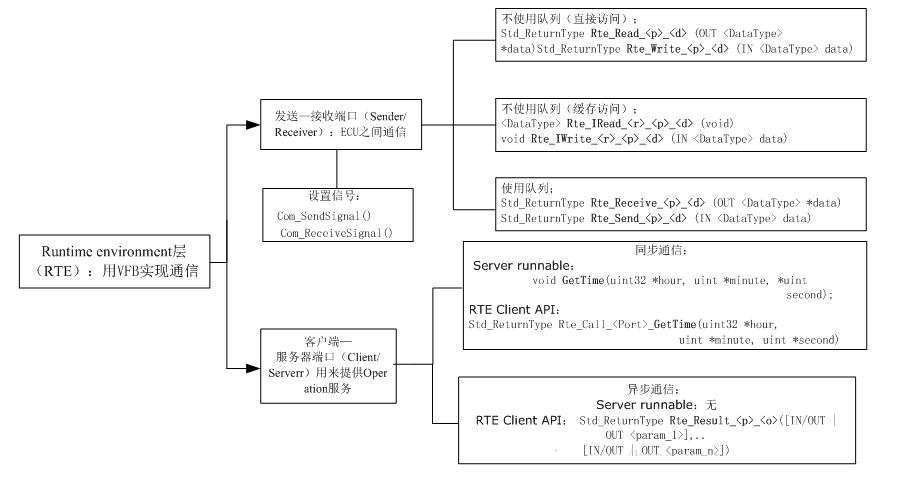
жаМфМўВПЗжИјгІгУВуЬсЙЉСЫЭЈаХЪжЖЮЃЌетРяЕФЭЈаХЪЧвЛжжЙувхЕФЭЈбЖЃЌПЩвдРэНтГЩНгПкЃЌгІгУВугыЦфЫћШэМўЬхЕФаХЯЂНЛЛЅгаСНжжЃЌЕквЛжжЪЧгІгУВужаЕФВЛЭЌФЃПщжЎМфЕФаХЯЂНЛЛЅЃЛЕкЖўжжЪЧгІгУВуФЃПщЭЌЛљДЁШэМўжЎМфЕФаХЯЂНЛЛЅЁЃЖјRTEОЭЪЧетаЉНЛЛЅЪЙгУЕФНгПкЕФМЏЩЂЕиЃЌЫќЛузмСЫЫљгаашвЊКЭШэМўЬхЭтВПНЛЛЅЕФНгПкЁЃДгФГжжвтвхЩЯРДПДЃЌЩшМЦЗћКЯAUTOSARЕФЯЕЭГЦфЪЕОЭЪЧЩшМЦRTEЁЃ
SW-CжЎМфЕФЭЈаХЪЧЕїгУRTE APIКЏЪ§ЖјЗЧжБНгЪЕЯжЕФЃЌЖМдкRTEЕФЙмРэКЭПижЦжЎЯТЁЃУПИіAPIзёбЭГвЛЕФУќУћЙцдђЧвжЛКЭШэМўзщМўздЩэЕФУшЪігаЙиЁЃОпЬхЭЈаХЪЕЯжШЁОігкЯЕЭГЩшМЦКЭХфжУЃЌЖМгЩЙЄОпЙЉгІЩЬЬсЙЉЕФRTE GeneratorздЖЏЩњГЩЕФЁЃ
дкЩшМЦПЊЗЂНзЖЮжаЃЌШэМўзщМўЭЈаХВуУцв§ШыСЫвЛИіаТЕФИХФюЃЌащФтЙІФмзмЯпVFBЃЈVirtual Functional BusЃЉЁЃЫќЪЧЖдAUTOSARЫљгаЭЈаХЛњжЦЕФГщЯѓЃЌРћгУVFBЃЌПЊЗЂЙЄГЬЪІНЋШэМўзщМўЕФЭЈаХЯИНкГщЯѓЃЌжЛашвЊЭЈЙ§AUTOSARЫљЖЈвхЕФНгПкНјааУшЪіЃЌМДФмЙЛЪЕЯжШэМўзщМўгыЦфЫћзщМўвдМАгВМўжЎМфЕФЭЈаХЃЌЩѕжСECUФкВПЛђепЪЧгыЦфЫћECUжЎМфЕФЪ§ОнДЋЪфЁЃ 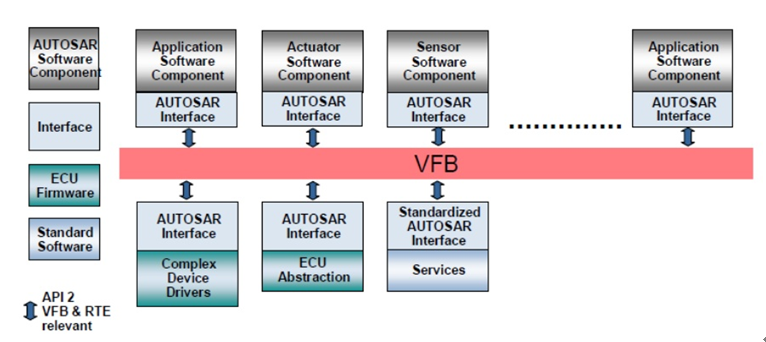
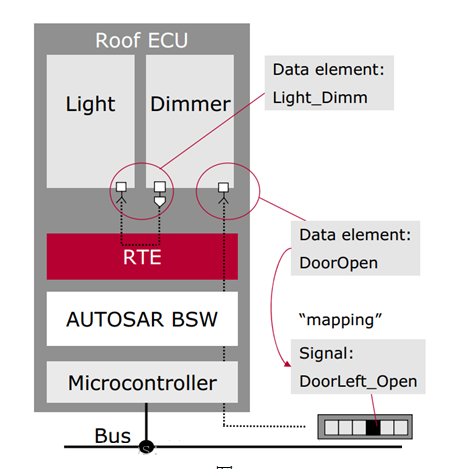
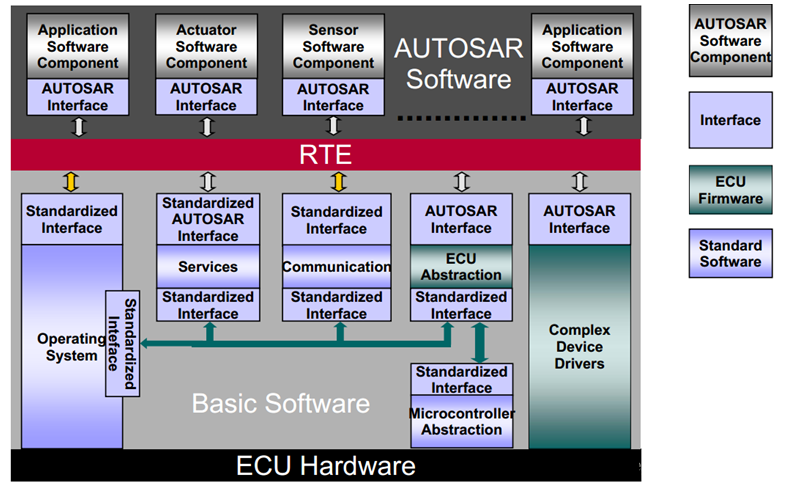
ЭМ 7
ДгЭМжаПЩвдПДЕНЃЌгаШ§жжНгПкУшЪіЃЌЮвУЧЯШДгЖЈвхЕФНЧЖШРДПДетШ§жжНгПкгаЪВУДВЛЭЌЁЃ
1. StandardizedInterfaceЃЈБъзМНгПкЃЉЃКБъзМНгПкЪЧдкAUTOSARБъзМжаБЛБъзМЛЏЕФНгПкЃЌЕЋЪЧВЂУЛгаЪЙгУAUTOSARНгПкММЪѕЃЌБъзМНгПкЭЈГЃБЛгУдкФГИіECUФкВПЕФШэМўФЃПщжЎМфЕФЭЈбЖЃЌВЛФмгУгкЭјТчЭЈбЖЁЃ
2. StandardizedAUTOSAR InterfaceЃЈБъзМAUTOSARНгПкЃЉЃКБъзМAUTOSARНгПкЪЧдкAUTOSARБъзМжаЪЙгУAUTOSARНгПкММЪѕБъзМЛЏЕФНгПкЃЌетбљЕФНгПкЕФгяЗЈКЭгявхЖМБЛЙцЖЈКУСЫЃЌетбљЕФНгПкЭЈГЃЪЙгУдкAUTOSARЗўЮёжаЃЌетбљЕФНгПкЪЧЛљДЁШэМўЗўЮёЬсЙЉИјгІгУГЬађЕФЁЃ
3. AUTOSARInterfaceЃЈAUTOSARНгПкЃЉЃКAUTOSARНгПкЖЈвхСЫШэМўФЃПщКЭBSWФЃПщЃЈНіНіЪЧIOГщЯѓКЭИДдгЧ§ЖЏЃЉжЎМфНЛЛЅЕФЗНЪНЃЌAUTOSARНгПкЪЧвдportЕФаЮЪНГіЯжЕФЃЌAUTOSARНЋECUФкВПЕФЭЈбЖКЭЭјТчЭЈбЖЪЙгУЕФНгПкНјааСЫЭГвЛЁЃ
ДгЩЯБпЕФЖЈвхжаЮвУЧПЩвдПДГіВЛЭЌЕФНгПкЪЙгУЕФГЁОАВЛЭЌЃЌМАВЛЭЌЕФФЃПщНЛЛЅЛсЪЙгУЕНВЛЭЌЕФНгПкЁЃГ§СЫНЋНгПкЙщРрвдЭтЃЌетбљЖЈвхОПОЙгаЪВУДЪЕМЪЕФвтвхФиЃПДгЪЕМЪЪЙгУЕФНЧЖШРДПДЃЌЕквЛКЭЕкЖўРрНгПкЖМЪЧгяЗЈгявхБъзМЛЏЕФНгПкЃЌМДНгПкКЏЪ§ЕФЪ§СПЁЂКЏЪ§ЕФУћзжЁЂКЏЪ§ВЮЪ§УћзжМАЪ§СПЁЂКЏЪ§ЕФЙІФмЁЂКЏЪ§ЕФЗЕЛижЕЖМвбОдкБъзМРяБпЖЈвхКУСЫЁЃВЛЭЌЕФЙЋЫОЕФШэМўдкЪЕЪЉетаЉНгПкЕФЪБКђЫфШЛФкШнЫуЗЈВЛЭЌЃЌЕЋЪЧЫќУЧГЄЯрКЭЙІФмЪЧвЛжТЕФЃЌНгПкЖЈвхдкAUTOSARЙцЗЖЮФЕЕРяБпЪЧПЩвдВщЕУЕНЕФЁЃЕкШ§РрНгПкФиЃЌAUTOSARНіНіЙцЖЈСЫМђЕЅЕФУќУћЙцдђЃЌетРрНгПкИпЖШЕФКЭгІгУЯрЙиЃЌБШШчBCUПижЦДѓЕЦДђПЊЕФНгПкПЩвдЪЧRte_Call_RPort_BeamLight_SetDigOutвВПЩвдЪЧRte_Call_RPort_HeaderLight_OutputЃЌЙЋЫОПЩвдздМКЖЈвхЃЌгжБШШчвЧБэЯывЊДгCANзмЯпЩЯЛёЕУГЕЫйЃЌИФНгПкПЩвдЪЧRte_IRead_RE_Test_RPort_Speed_uint8вВПЩвдЪЧRte_IRead_Test_RE_RPort_Spd_uint8ЃЌетаЉНгПкБиаыЭЈЙ§RTEНЛЛЅЁЃ
ЭМ 8
3ЁЂBasic softwareВуЃЈBSWЃЉ
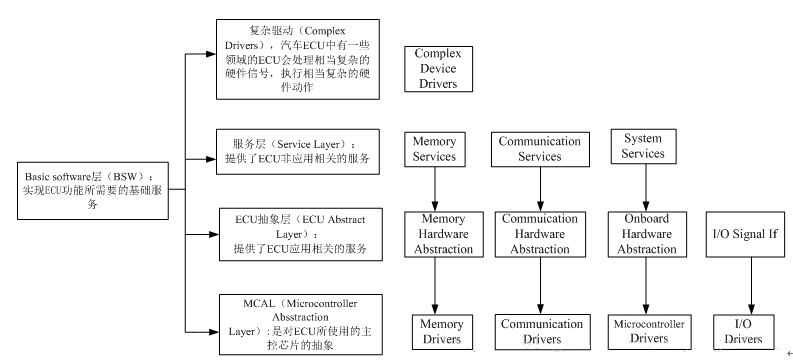
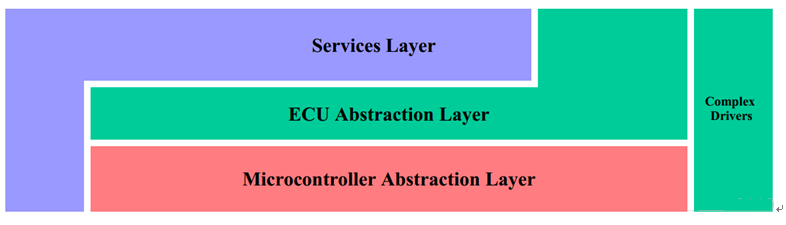
ЫфШЛЦћГЕжагаИїжжВЛЭЌЕФECUЃЌЫќУЧОпгаИїжжИїбљЕФЙІФмЃЌЕЋЪЧЪЕЯжетаЉЙІФмЫљашвЊЕФЛљДЁЗўЮёЪЧПЩвдГщЯѓГіРДЕФЃЌБШШчIOВйзїЃЌADВйзїЃЌеяЖЯЃЌCANЭЈбЖЃЌВйзїЯЕЭГЕШЃЌЮоЗЧОЭЪЧВЛЭЌЕФECUЙІФмЃЌЫљВйзїЕФIOЁЂADДњБэВЛЭЌЕФКЌвхЃЌЫљНгЪеЗЂЫЭЕФCANЯћЯЂДњБэВЛЭЌЕФКЌвхЃЌВйзїЯЕЭГЕїЖШЕФШЮЮёжмЦкгХЯШМЖВЛЭЌЁЃетаЉПЩвдБЛГщЯѓГіРДЕФЛљДЁЗўЮёБЛГЦЮЊЛљДЁШэМўЁЃИљОнВЛЭЌЕФЙІФмЖдЛљДЁШэМўМЬајПЩвдЯИЗжГЩЫФВПЗжЃЌЗжБ№ЮЊЗўЮёВуЃЈService LayerЃЉЃЌECUГщЯѓВуЃЈECUAbstract LayerЃЉЃЌИДдгЧ§ЖЏЃЈComplexDriverЃЉКЭMCALЃЈMicrocontroller Absstraction LayerЃЉЃЌЫФВПЗжжЎМфЕФЛЅЯрвРРЕГЬЖШВЛОЁЯрЭЌЁЃ
ЗўЮёВуЃЈService LayerЃЉЃЌетвЛВуЛљДЁШэМўЬсЙЉСЫЦћГЕECUЗЧгІгУЯрЙиЕФЗўЮёЃЌАќРЈOSЃЌЭјТчЭЈбЖЃЌФкДцЙмРэЃЈNVRAMЃЉЃЌеяЖЯЃЈUDSЃЌЙЪеЯЙмРэЕШЃЉЃЌECUзДЬЌЙмРэФЃПщЕШЃЌЫќУЧЖдECUЕФгІгУВуЙІФмЬсЙЉИЈжњжЇГжЃЌетвЛВуШэМўдкВЛЭЌСьгђЕФECUжавВЗЧГЃЯрЫЦЃЌР§ШчВЛЭЌЕФECUжаЕФOSЕФШЮЮёжмЦкКЭгХЯШМЖВЛЭЌЃЌВЛЭЌЕФECUжаЕФNVRAMЕФЗжЧјВЛЭЌЃЌДцДЂЕФФкШнВЛЭЌЁЃ
ECUГщЯѓВуЃЈECU Abstract LayerЃЉЃЌетвЛВуШэМўЬсЙЉСЫECUгІгУЯрЙиЕФЗўЮёЃЌЫќЪЧЖдвЛИіECUЕФГщЯѓЃЌЫќАќРЈСЫЫљгаЕФECUЕФЪфШыЪфГіЃЌБШШчADЃЌDIOЃЌPWMЕШЃЌетвЛВуШэМўжБНгЪЕЯжСЫECUЕФгІгУВуЙІФмЃЌПЩвдЖСШЁДЋИаЦїзДЬЌЃЌПЩвдПижЦжДааЦїЪфГіЃЌВЛЭЌСьгђЕФECUЛсгаКмДѓЕФВЛЭЌЁЃ
MCALЃЈMicrocontroller Absstraction LayerЃЉЃЌетвЛВуШэМўЪЧЖдECUЫљЪЙгУЕФжїПиаОЦЌЕФГщЯѓЃЌЫќИњаОЦЌЕФЪЕЯжНєУмЯрЙиЃЌЪЧECUШэМўЕФзюЕзВуВПЗжЃЌжБНгКЭжїПиаОЦЌМАЭтЩшаОЦЌНјааНЛЛЅЃЌЫќЕФзїгУЪЧНЋаОЦЌЬсЙЉЕФЙІФмГщЯѓГЩНгПкЃЌШЛКѓАбетаЉНгПкЬсЙЉИјЩЯБпЕФЗўЮёВу/ECUГщЯѓВуЪЙгУЁЃ
ИДдгЧ§ЖЏЃЈComplex DriversЃЉЃЌЦћГЕECUжагавЛаЉСьгђЕФECUЛсДІРэЯрЕБИДдгЕФгВМўаХКХЃЌжДааЯрЕБИДдгЕФгВМўЖЏзїЃЌР§ШчЗЂЖЏЛњПижЦЃЌABSЕШЃЌетаЉЙІФмЯрЙиЕФШэМўКмФбГщЯѓГіРДЪЪгУгкЫљгаЕФЦћГЕECUЃЌЫќЪЧИњECUЕФгІгУвдМАECUЫљЪЙгУЕФгВМўНєУмЯрЙиЕФЃЌЪєгкAUTOSARЙЙМмжадкВЛЭЌЕФECUЩЯЮоЗЈвЦжВЕФВПЗжЁЃ
ЭМ 9
ЭМ10ЪЧBSWВужаИїИізгФЃПщЫЕУїЁЃ
ЭМ 10
4ЁЂMicrocontrollerВу
ЕзВуЧ§ЖЏВуЪЧгЩаОЦЌЩњВњГЇМвЬсЙЉЁЃ
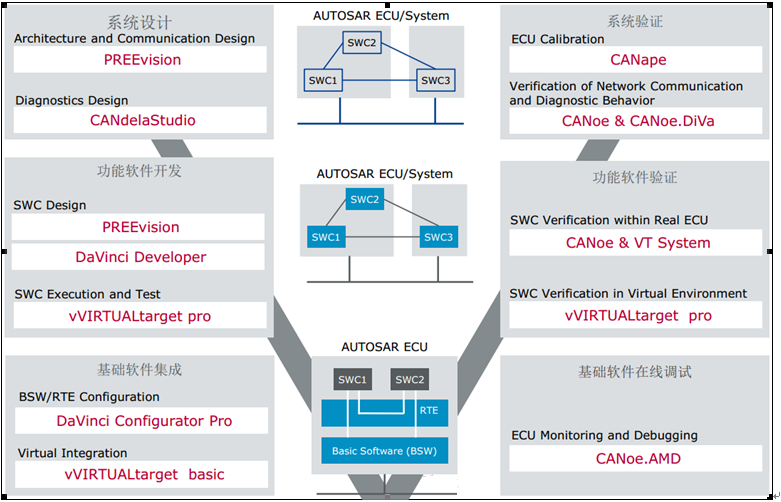
Ш§ЁЂПЊЗЂЙЄОп
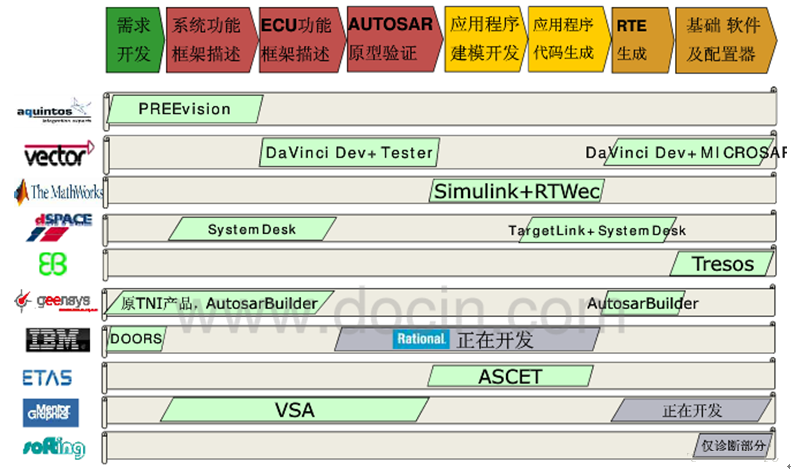
ЩЯЭМЪЧAutoSarПЊЗЂСїГЬНзЖЮМАИїИіНзЖЮПЩвдЪЙгУЕФПЊЗЂЙЄОпЁЃДгЭјЩЯЕїбаЧщПіРДПДЃЌVectorКЭEBЙЋЫОгаећЬзЕФПЊЗЂЙЄОпСДЁЃЦфжаЃЌVectorжаЕФDaVinciDeveloperКЭDaVinci ConfiguratorProПЊЗЂЙЄОпЪЙгУНЯЮЊЦеБщЃЌНЈвщВЩгУVectorЙЋЫОПЊЗЂЙЄОпСДЁЃ
ДгПЊЗЂСїГЬЩЯПДЃЌИїИіПЊЗЂНзЖЮЗжБ№ЖМгаИїздЕФПЊЗЂЙЄОпЃК
1ЃЉ ЯЕЭГЩшМЦНзЖЮМДашЧѓПЊЗЂгыЯЕЭГЙІФмЩшМЦЃЌВЩгУPREEvisionПЊЗЂЙЄОпЃЈМлИёзЩбЏЮДЛигЪМўЃЉЃЛ
2ЃЉ SWCЙІФмШэМўПЊЗЂНзЖЮМДECUЙІФмУшЪіЃЌВЩгУDaVinciDeveloperПЊЗЂЙЄЃЛЃЈМлИёзЩбЏЮДЛигЪМўЃЉЃЛ
3ЃЉ BSWЛљДЁШэМўМАRTEЩшМЦЃЌВЩгУDaVinciConfigurator ProПЊЙЄОпЃЈМлИёзЩбЏЮДЛигЪМўЃЉЃЛ
4ЃЉ ЭЗЮФМўКЭCДњТыВЩгУMATLABЁЄSimulinkЙЄОпздЖЏЩњГЩЁЃЃЈЕСАцЃЉ
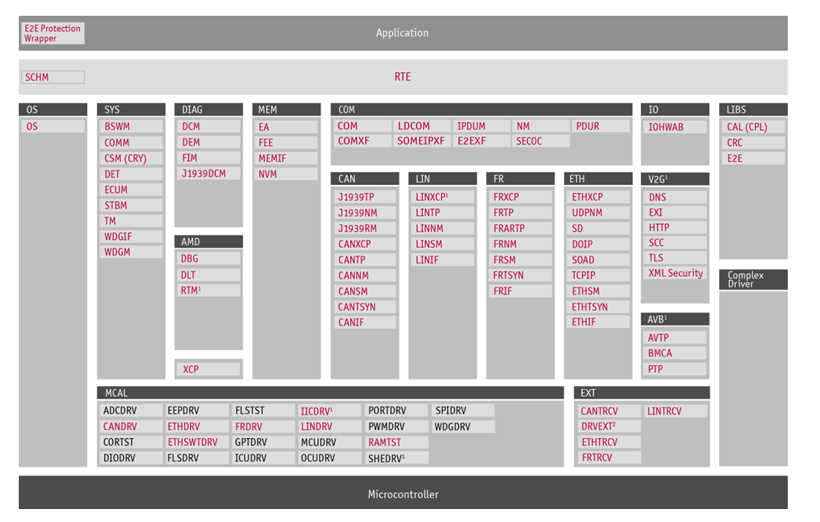
ЩЯЭМеЙЪОVectorЙЋЫОПЊЗЂAutoSarЪБЫљгУЕФЙІФмзщМўЃЌЦфжаКьЩЋзжЬхЪЧVectorЙЄОпСДжаздДјзщМўЁЃИљОнашвЊЃЌднЖЈашвЊOSЁЂSYSЁЂDIAGЁЂMEMЁЂCOMЁЂCANЁЂFRЁЂETHЁЂMCALзщМўЃЌМлИёдкзЩбЏЕБжаЁЃ
КкЩЋзжЬхЪЧЕзВугВМўЙЉгІЩЬЬсЙЉЁЃЯжвбзЩбЏЕНЃЌШ№ШјЙЉгІЩЬЕзВуЧ§ЖЏЪлМл$20KЁЃ
ЫФЁЂПЊЗЂСїГЬ
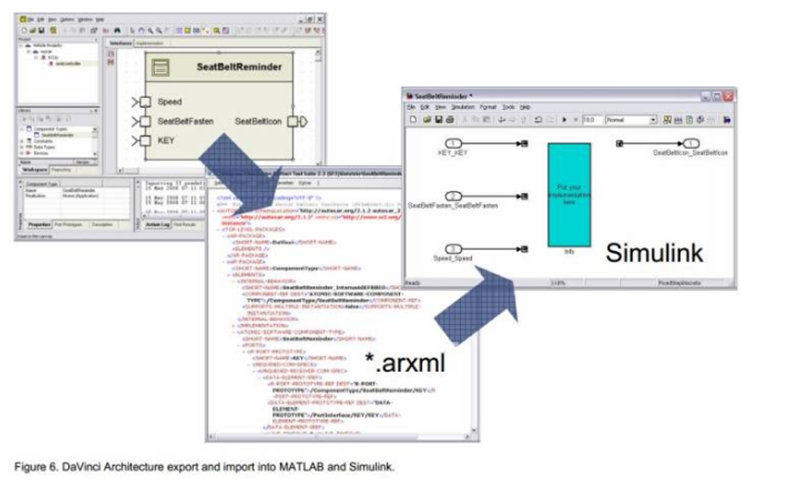
MATLABЁЄSimulinkКЭReal-TimeWorkshop Embedded CoderЩњГЩAUTOSARБъзМЕФДњТыЪЧЭИУїКЭжБЙлЕФЙ§ГЬЃЌЫќжЇГжСНжжВЛЭЌЕФЙЄзїСїГЬЃКздЩЯЖјЯТКЭздЯТЖјЩЯЁЃЮвУЧВЩгУздЩЯЖјЯТПЊЗЂЗНЪНЁЃ
здЩЯЖјЯТЃЌДгМмЙЙФЃаЭЕНAutosar SCЁЃдкздЩЯЖјЯТЕФПЊЗЂСїГЬжаЃЌЯЕЭГЙЄГЬЪІЪЙгУМмЙЙЩњГЩЙЄОпЃЈШчdavinci tool suiteЃЉРДЩшМЦећГЕECUЭјТчЁЃЕБШЛЃЌЙЄГЬЪІвВПЩвдЪЙгУЦфЫћЕФМмЙЙЩшМЦЙЄОпЁЃМмЙЙШэМўЛсЪфГівЛИіXMLРДУшЪіЖдгІЕФзщМўЃЌИУЮФМўРяАќКЌСЫзщМўЕФвЛаЉБивЊаХЯЂБШШчЃКrunnablesЃЌНгПкЃЌЪ§ОнРраЭЕШЕШЁЃMatlabШэМўПЩвдРћгУМмЙЙШэМўЩњГЩЕФXMLЮФМўздЖЏДДНЈSimulinkМмЙЙФЃаЭЃЌРяУцАќКЌСЫНгПкФЃПщвдМАЯргІЕФAutosarЯрЙиЩшжУЁЃжЎКѓЯЕЭГЙЄГЬЪІОЭПЩвддкИУПђМмФЃаЭЕФЛљДЁЩЯЃЌЭъЩЦФкВПЕФПижЦФЃПщЁЃ
|








