| 编辑推荐: |
在本文中,我们会介绍CAN FD(CAN Flexible Data-rate)的主要内容,包括:CAN FD框架,开销和效率,示例应用和CSS的CAN FD记录仪案例,以及CAN FD的发展趋势,希望对您的学习有所帮助。
本文来自于虹科车用总线技术
,由火龙果软件Alice编辑、推荐。 |
|
在本文中,我们会介绍CAN FD(CAN Flexible Data-rate)的主要内容,包括:CAN FD框架,开销和效率,示例应用和CSS的CAN FD记录仪案例,以及CAN FD的发展趋势。 CAN FD看起来很复杂,本文旨在提供一个通俗易懂的介绍,以全面了解CAN FD。
为什么会出现CAN FD?
CAN协议自1986年问世以来就很流行:几乎任何移动的机器如今都使用CAN,无论是汽车,卡车,轮船,飞机还是机器人。 但是随着现代科技的兴起,对“传统”的CAN协议( ISO 11898-1:2015 中使用的官方术语)的要求越来越高:
- 汽车功能的高速发展正在推动数据的大爆炸
- 网络越来越受到1Mbit/s带宽的限制
- 为了应对这些情况,OEM创造的复杂且又昂贵的解决方案
具体而言,传统CAN的开销很大(> 50%),因为每个CAN数据帧只能包含8个数据字节。此外,网络速度限制为1 Mbit/s,从而限制了数据生成功能的实现。 CAN FD解决了这些问题,使其具有前瞻性。
什么是CAN FD? CAN FD协议是由Bosch以及行业专家预研开发的,并于2012年发布。通过标准化对其进行了改进,现已纳入ISO 11898-1:2015。原始的Bosch CAN FD版本(非ISO CAN FD)与ISO CAN FD是不兼容。CAN FD具有四个主要优点:
CAN FD每个数据帧最多支持64个数据字节,而传统CAN最多支持8个数据字节。这减少了协议开销,并提高了协议效率。
CAN FD支持双比特率:与传统CAN一样,标称(仲裁)比特率限制为1 Mbit/s,而数据比特率则取决于网络拓扑/收发器。实际上,可以实现高达5 Mbit/s的数据比特率。
CAN FD使用改进的循环冗余校验(CRC)和“受保护的填充位计数器”,从而降低了未被检测到的错误的风险。这在汽车和工业自动化等安全攸关的应用中至关重要。
在一些特定的情况下CAN FD能用在仅使用传统CAN的ECU上,这样就可以逐步引入CAN FD节点,从而为OEM简化程序和降低成本。 实际上,与传统CAN相比,CAN FD可以将网络带宽提高3到8倍,从而为数据的增长提供了一种简单的解决方案。
CAN FD是怎么工作的? CAN FD看起来很简单:加快数据传输速度,并让每个消息的信息量增加,对吗? 但是实际上,并不是那么简单。下面我们概述了CAN FD的解决方案所必须应对的主要挑战。 两个关键的挑战 在查看CAN FD数据帧之前,我们关键是要了解想要维持的传统CAN的两个核心部分:
1、避免关键消息延迟 为什么不简单地将64个字节的数据打包进传统的CAN里面呢? 这样做可以减少开销并简化消息解释。然而,如果比特率不变,这也会占用CAN总线更长时间,从而可能延迟带有关键任务的更高优先级的数据帧。
2、保持CAN线实际上的长度
每条消息发送更多数据需要更高的速度。那为什么不加速整个CAN消息(而不仅仅是数据段)呢? 这是由于“仲裁”:如果2个以上的节点同时发送数据,则仲裁将决定哪个节点具有优先权。“优胜者”继续发送(无延迟),而其他节点会退出仲裁过程并转变成接收方。 关于“位时间” 在仲裁过程中,“位时间”在每个位之间提供足够的延迟,以允许网络上的每个节点做出反应。为确保在位时间内到达每个节点,以1 Mbit/s的速度运行的CAN网络的最大长度应为40米(实际上为25米)。加快仲裁段的速度会将总线最大长度减少到不合适的长度水平。
另一方面,仲裁段之后有一条“空旷的高速公路”,可在数据传输期间(只有一个节点在驱动总线时)实现高速传输。在ACK时隙之前(当多个节点确认正确接收数据帧时)速度需要降低到标称比特率。 因此,有必要找到一种方法,只在数据传输过程中提高速度。
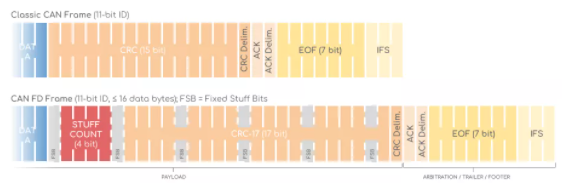
解决方案:CAN FD框架 CAN FD协议引入了经过调整的CAN数据帧,以实现额外的数据字节和灵活的比特率。 下面我们比较一个11位的传统CAN帧与一个11位的CAN FD帧(同时也支持29位):

下面我们一步一步地讨论这些差异: RTR vs. RRS:传统CAN中使用了远程传输请求(RTR)来识别数据帧和相应的远程帧。在CAN FD中,根本不支持远程帧,远程请求替换(RRS)始终是显性(0)。 r0 vs. FDF: 在传统CAN中,r0为保留显性(0),在CAN FD中,称为FDF,为隐性(1)。 在r0/FDF位之后,CAN FD协议增加了“3个新位”。请注意,不具备CAN FD功能的节点在FDF位之后会产生错误帧。 res: 这个新的保留位起着与r0相同的作用——也就是说,将来它可以被设置为隐性(1)来表示一个新的协议。 BRS:比特率开关(BRS)可以为显性(0),这意味着CAN FD数据帧以仲裁速率(即最高1 Mbit/s)发送。将其设置为隐性(1)意味着数据帧的其余部分以更高的比特率(最高5 Mbit/s)发送。 ESI: 错误状态指示器(ESI)位默认为显性(0),即“错误有效”。如果发送器变为“被动错误”,则将隐性(1)表示它处于被动错误模式。

DLC: 像在传统CAN中一样,CAN FD DLC是4位,表示帧中数据字节的数量。上表显示了这两种协议如何始终使用多达8个数据字节的DLC。为了维持4位DLC,CAN FD使用从9到15的其余7个值来表示所使用的数据字节数(12、16、20、24、32、48、64)。
SBC: 填充位计数(SBC)在CRC之前,由3个格雷编码位和一个奇偶校验位组成。随后的固定填充位可以视为第二个奇偶校验位。添加了SBC以提高通信可靠性。 CRC: 传统CAN中的循环冗余校验(CRC)为15位,而在CAN FD中为17位(最多16个数据字节)或21位(20-64个数据字节)。在传统CAN中,CRC中可以包含0到3个填充位,而在CAN FD中,总是有四个固定填充位以提高通信可靠性。 ACK:CAN FD数据帧的数据段(也称为有效负载)停止在ACK位,这也标志着可变比特率的结束。
CAN FD与CAN的开销和数据效率的对比 与传统CAN相比,CAN FD的新增功能增加了很多额外的位,CAN FD如何能高效地减少开销? 答案是:它并没有。请看下面3个数据字节的传统CAN与CAN FD的可视化图。实际上,超过8个数据字节前,CAN FD的效率都不会超过传统CAN。但是,当数据长度向64个数据字节靠拢时,效率是从50%提升至90%。
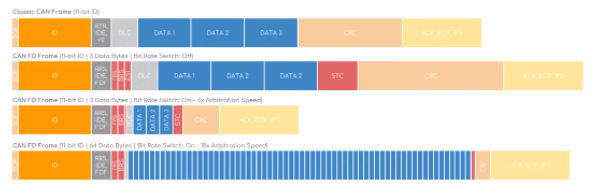
对速度的需要:采取开启比特率转换(BRS) 如上图可知,CAN FD以常规速度发送64个数据字节将阻塞CAN总线,降低实时性能。 为了解决这个问题,可以启用比特率切换,允许更高的速率(例如5 Mbit/s的数据段波特率对比仲裁段的1 Mbit/s)发送有效载荷。上面我们以图解方式可视化了3个数据字节和64个数据字节方案的效果。 注意,较高的速度适用于以BRS位开始并以CRC分隔符结束的数据帧部分。 此外,当今大多数车辆使用0.25-0.5 Mbit/s,这意味着以5 Mbit/s的速度,CAN FD将是有效载荷传输速度的10倍。
关于传统CAN和CAN FD节点的结合 如前所述,传统CAN和CAN FD节点可以在某些条件下混合使用。这样就可以逐步向CAN FD迁移,而不必一次切换每个ECU。
存在两种情况: 100%CAN FD系统:在这里,CAN FD控制器可以自由混合传统CAN和CAN FD数据帧。 一些遗留节点是传统CAN:在此,CAN FD控制器可以切换到经典CAN通信,以避免与经典CAN节点通信参加错误帧。另外,在刷写ECU时,传统的CAN节点可能会关闭以允许暂时转换为CAN FD通信。
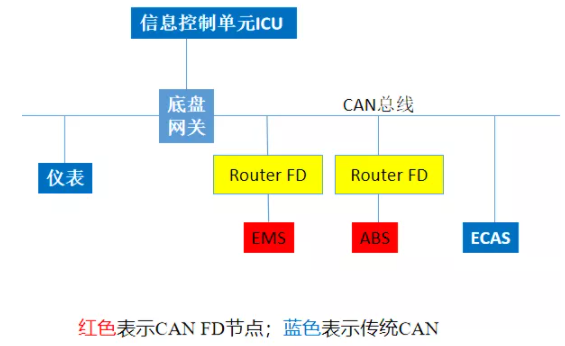
解决CAN和CAN FD网络共存问题最简单的就是加一个支持CAN FD的网关,如 PCAN-Router FD 。
CAN FD最大的比特率是多少? CAN FD的一个令人困惑的方面是有效负载阶段的最大比特率,因为不同的文章提到了不同的级别。 有人指出,实际应用中可以达到8 Mbit/s,理论上可以达到15 Mbit/s。其他则规定最高为12 Mbit/s。此外,戴姆勒指出,超过5 Mbit/s的速度是值得怀疑的,既没有标准,又因为低成本的汽车以太网(10 BASE-T1)有望限制对CAN FD的更高需求。那么什么是正确的呢? 这得看情况,从ISO 11898-2(收发器芯片标准)来看,它指定了两个对称参数集。推荐使用那些具有改进的对称参数,通常宣传为5mbit/s的收发器。可达到的数据相位比特率取决于许多因素。最重要的一项是所需的温度范围。刷写ECU时不需要保持低温状态。这意味着对于刷写ECU,可能会达到12Mbit/s。另一个重要的比特率限制是由所选的拓扑引起的。对比长分支甚至星形的混合拓扑,短分支的总线拓扑可以显著提高比特率。对于-40摄氏度至+125摄氏度的温度范围,大多数多分支总线线路网络被限制为2Mbit/s。CiA在CiA 601-3网络设计建议中提供了适当的经验法则。这包括在数据阶段设置采样点的建议。
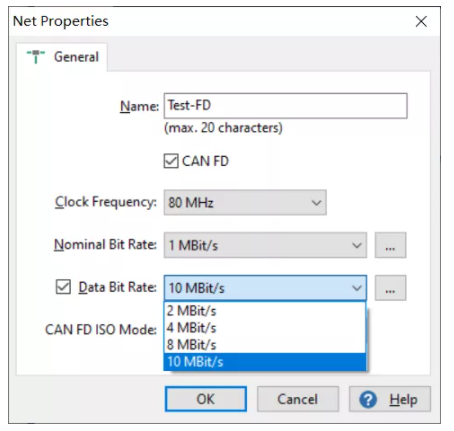
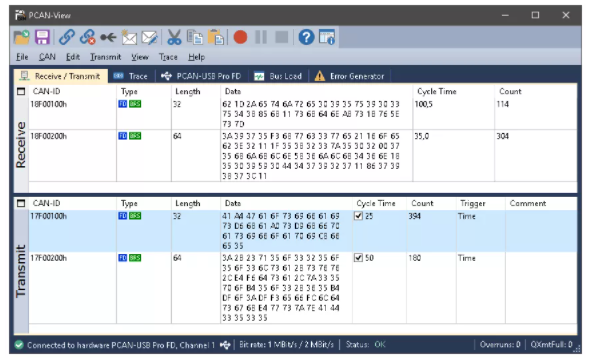
注:图片来自 PCAN 软件中CAN FD波特率设置的界面
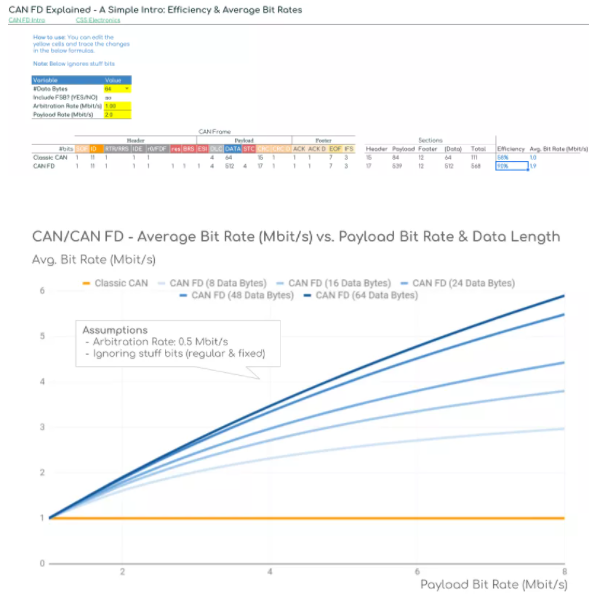
CAN FD计算器工具:效率和比特率 要详细了解CAN FD效率和平均比特率,我们建议您查一下我们的CAN FD计算器(可向虹科咨询索要CAN FD计算器)。 这个CAN FD计算器是一个在线可编辑的表格,可以根据用户输入不同的报文内容进行CAN和CAN FD的效率对比,同时会提供相应的直观效率曲线。
CAN FD的应用场景介绍 简而言之,CAN FD以更快的速度处理更多的数据。这对于一些日益相关的用例是至关重要的: 电动汽车 电动汽车和混合动力汽车使用要求更高比特率的新动力总成概念。新的控制单元涉及到DC / DC逆变器、电池、充电器以及增程器等,从而增加了复杂性。到2025年,预计所需的比特率将超过CAN,随着电动汽车的爆炸性增长,这可能是最先应用CAN FD的领域。
ECU刷写 车载软件变得越来越复杂。因此,通过例如OBD2端口执行ECU固件更新需要花几个小时。使用CAN FD,可以使此类过程的速度提高4倍以上。该用例一直是汽车OEM需求CAN FD的原始驱动因素之一。
机器人 几个应用程序依赖于时间同步行为。例如多轴机器人手臂。此类设备通常使用CANopen,并且每个控制器都需要与时间同步发送多个CAN帧(PDO)(不会受到较高优先级帧的干扰。通过转换为CAN FD,原有多帧的数据可以通过单帧发送,从而提高效率。
ADAS和安全驾驶 乘用车和商用车中越来越多地采用高级驾驶员辅助系统(ADAS)。这给经典CAN的总线负载带来了压力,而ADAS是提高安全性的关键。在这里,CAN FD将在不久的将来成为增强安全驾驶的关键。

客车和货车 客车和货车使用较长的CAN总线(10-20米)。因此通常它们基于低速比特率(根据J1939-14,为250 kbit/s或500 kbit/s)。在这里,即将到来的J1939 FD 协议有望在商用车功能方面实现重大改进,其中包括例如 ADAS。
加密CAN总线 如最近的CAN黑客攻击所示,传统CAN容易受到攻击。如果黑客可以访问CAN总线(例如无线),则可以关闭关键功能。通过安全车载通信(SecOC)模块进行的CAN FD身份验证可能是密钥推出的关键。
CSS记录CAN FD数据应用案例 随着CAN FD的兴起,将有几种记录CAN FD数据的使用案例:
记录汽车数据 随着新车的推出,CAN FD数据记录仪将成为记录汽车OBD2数据的关键

重型车队远程信息处理 兼容J1939灵活数据速率的IoT CAN FD记录仪将是未来重型远程信息处理的关键
预见性维护 随着CANopen FD的推出,新的工业机械将需要CAN FD物联网记录仪,以帮助预测和避免故障
车辆或者机器的“黑匣子” 一个CAN FD记录仪可以作为一个“黑匣子”,例如新的原型车辆,为诊断和研发提供数据 CAN FD的趋势
- CAN FD预计在未来几年将取代传统CAN:
- 首批支持CAN FD的汽车将于2019/20年上市
- 最初推出可能会使用2Mbit/s,然后逐渐过渡到5Mbit/s的数据比特率
- CANopen FD已通过CiA 1301 1.0进行了修改
- J1939-22使用CAN FD数据帧
- CAN仍是一项成长中的技术,最近主要归功于CAN FD
- 预计将来,CAN FD将用于大多数新的开发项目中
CAN FD对比于其他产品 当然,没有带宽和有效负载要求的传统应用程序仍将使用经典CAN。此外,CAN社区已经在开发下一代CAN数据链路层,支持高达2048字节的有效负载。这种方法可以视为10 Mbit/s以太网的替代方法。因此,仍然需要确定CAN FD在未来将扮演什么样的角色,但它肯定会不断成长和发展的,同时也相信CAN FD的未来是光明的。 |






 订阅
订阅