| 编辑推荐: |
本文主要介绍了电动车窗控制逻辑及防夹系统(Anti-Pinch
System)等方面的内容。希望对你的学习有帮助。
本文来自于知乎,由火龙果软件Linda编辑,推荐。 |
|
目前市面上销售的汽车大多都配置有电动车窗,而且很多车型都具有一键升降功能。由于车窗升降机构都是通过减速器将直流电机速度降低同时增加扭矩来拉动车窗,因此关闭的时候会有夹伤的风险,所以具备该功能的汽车在其车窗控制器或者车身控制器内都会采用一系列参数和算法来实现车窗防夹功能。
一、典型电动车窗结构和防夹简介
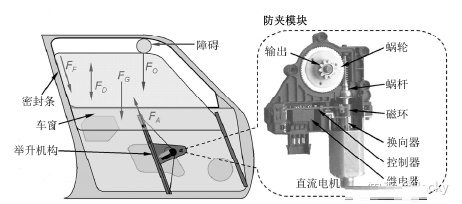
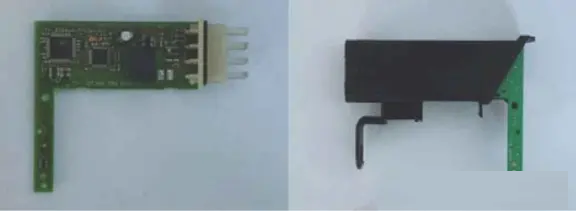
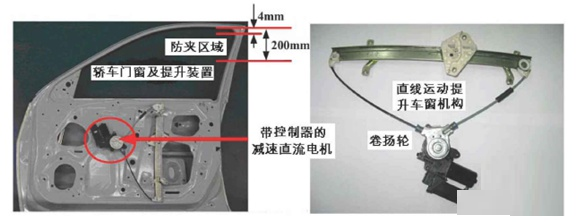
典型的电动车窗结构如上图所示,其中左侧显示了电动车窗的机械结构,并显示了车窗上行中所受到的电机举升力FA,密封条施加的摩擦力FF,自重FG,夹持障碍物时受到的阻力FO(即夹持力),汽车行驶于不规整路面发生颠簸,由于惯性造成的力FD。右侧为一集成了电机和霍尔传感器的防夹模块。除了集成模块,电动车窗上并无其他与升降相关的电子元件,因此防夹判断所用信息全部来自集成模块中传感器的输出信号。
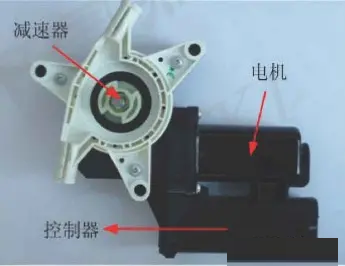
直流电机:直流电机直接关系到电动玻璃升降器的正常工作。它要具有体积小、重量轻、防护等级高、噪声低、电磁干扰小、运行可靠等特点,并要求有良好的耐久性、水密性、耐热、耐腐蚀、耐振动、阻燃等性能。
涡轮涡杆减速器:由于电机的转速过高,不适合直接应用于车窗升降系统,所以需要减速器将电机的转速降到合理的转速。
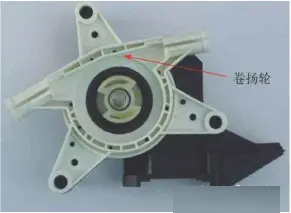
卷扬轮:卷扬轮将旋转运动转变为直线运动,通过钢缆或钢丝与减速器相连,从而带动车窗沿滑道做升降运动。
控制器:控制器通过控制继电器来驱动电机的正反转,从而使车窗上升或下降。
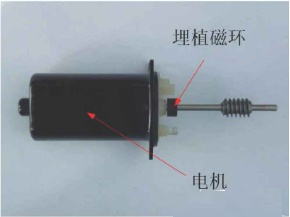
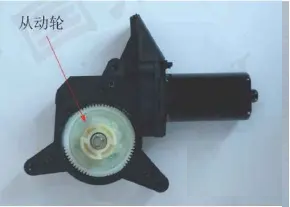
车窗升降系统实物连接如下图所示:
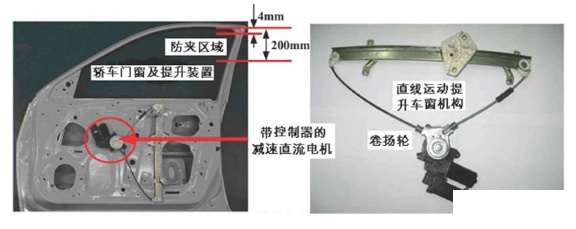
电动车窗防夹功能简介:当前主流的车窗防夹基本原理是在电机轴上安装磁环,在磁环附近安装有带霍尔传感器、MCU的电子模块,电机轴每转动一周,霍尔传感器将产生固定数量的方波,在车窗上升过程中遇到障碍物时,阻力增大,电机转速变小,电流增大,而电动机转速变小会使霍尔信号方波的脉宽增大。
电子模块可通过霍尔信号脉宽或电机电流的变化来判断车窗是否遇到障碍物以及夹物力的大小(一般超过100N被认为遇到障碍物),计算每次上升过程中的累计脉冲数量,可判断电动车窗是否处于防夹区域
(一般离车窗顶端4~200 mm位置),进而最终确定是否需要产生防夹作用 。如果模块判定需要防夹,则发出指令使电机反转,电机下降一段距离后
(一般下降 120 mm左右) 停止。车窗系统连接如下图所示:
二、电动车窗电气控制原理
汽车上的车窗玻璃升降器最初为机械式,通过手动摇窗把手驱动升降器来进行车窗玻璃升降,后来为了方便、安全逐步改为电动车窗,通过操纵车窗升降开关来控制玻璃升降。
最初传统的电动车窗电气原理图见下图。按下车窗升降开关时,电机电流需要通过车窗开关触点,在升降器升到顶或下降到底若未及时松开开关时,电机堵转,通过升降开关的电流突然猛增,会导致开关的提前损毁、开关故障率较高,甚至升降器齿盘切齿。
传统电动车窗电气原理图
后续针对上述缺点,对车窗控制电路进行改进。因车窗玻璃上升到顶时,驾驶员一般会注意到,但车窗玻璃是否已下降到底,驾驶员一般不容易判断,因此增加下行程开关,即在升降器导轨上安装一个行程开关,当升降器降到底时,将该行程开关顶开,立即断开开关和电机电流。
增加下行程开关的电动车窗的车经过一段时间的使用, 有用户反馈升降器不工作,但有时车辆振动后,升降器又恢复工作。经分析发现因电机电流也通过下行程开关,升降器上升到顶时还是存在堵转,电流较大,使用一段时间后该开关触点烧蚀,造成接触不良。为减少用户抱怨,
对该电路又进行一次改进,取消了行程开关,增加一个电流保护器,
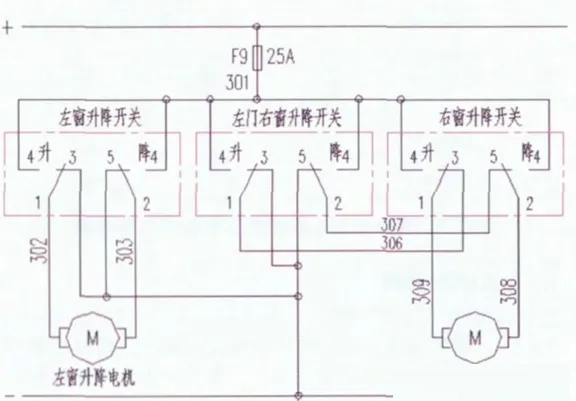
后续随着技术更新,为降低成本,提高稳定性,车窗控制电路采用全部由继电器控制的方案,如下图所示。该方案电气原理简单清楚,图中车窗升降开关只提供控制信号,开关不存在损坏,但升降器电机无过载保护功能。
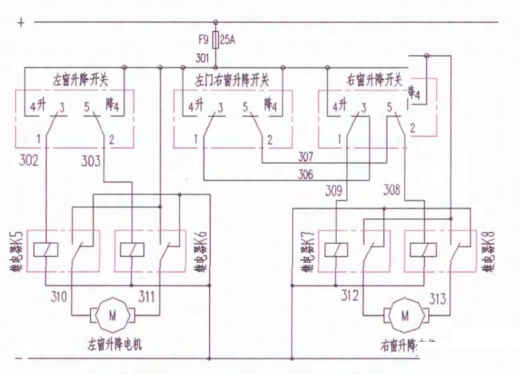
采用继电器控制的电动车窗电气原理图
现在的电动车窗通常是将上述电气控制电路集成到门控制器(TSG)或车身控制器(BCM)中。下图是某车型中BCM电气原理示意图,可以看出BCM除控制车窗玻璃升降、中央门锁外,还有手制动开关、警报开关等,其控制内容较多。
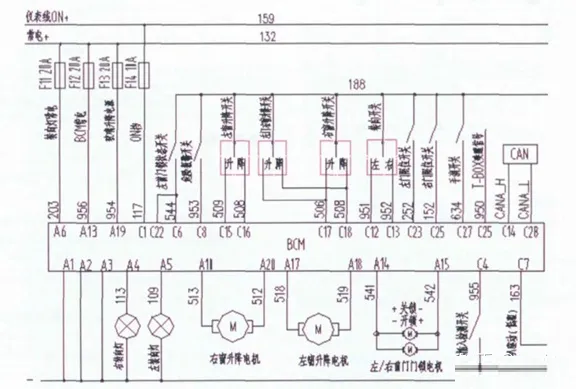
BCM控制的电动车窗电气原理图
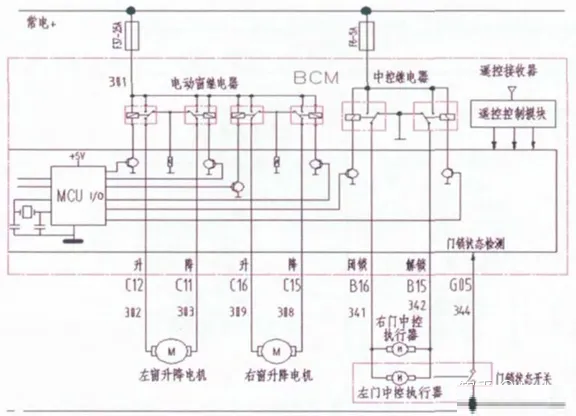
BCM内部采用继电器控制的电动车窗、中控锁控制简图
三、车窗控制器数据通讯原理(以新途安为例)
该车型具有一定的代表性,其升降器及中控锁是采用前CAN后LIN控制。前CAN后LIN控制是指驾驶员侧及前排乘客侧车门控制单元通过舒适系统CAN总线与BCM车身控制单元连接,左后车门控制单元通过LIN总线与驾驶员侧车门控制单元连接,右后车门控制单元通过LIN总线与前排乘客侧车门控制单元连接。
升降器的数据总线连接如下图所示。接通点火开关,按下驾驶员侧车门上的电动车窗升降器开关E40时,开关信号给驾驶员侧车门控制单元J386,J386收到开关信号以后,控制本车门的车窗升降。
按驾驶员侧车门上的前排乘客侧电动车窗升降器开关E81,开关信号给J386,J386接收到开关信号后,通过CAN数据线将此信号传输给BCM和前排乘客侧车门控制单元J387,J387接收到此信号后控制电动车窗的升降。
按下驾驶员侧车门上的左后电动车窗升降器开关E53,开关信号给J386,J386接收到开关信号后,通过LIN数据线将此信号传输给左后车门控制单元J388,J388接收到此信号后控制电动车窗的升降。
按下驾驶员侧车门上的右后电动车窗升降器开关E55,开关信号给J386,J386接收到开关信号后,通过CAN数据线将此信号传输给BCM和前排乘客侧车门控制单元J387,J387接收到此信号后通过LIN数据线将此信号传输给右后车门控制单元,右后车门控制单元收到此信号后,控制电动车窗的升降。
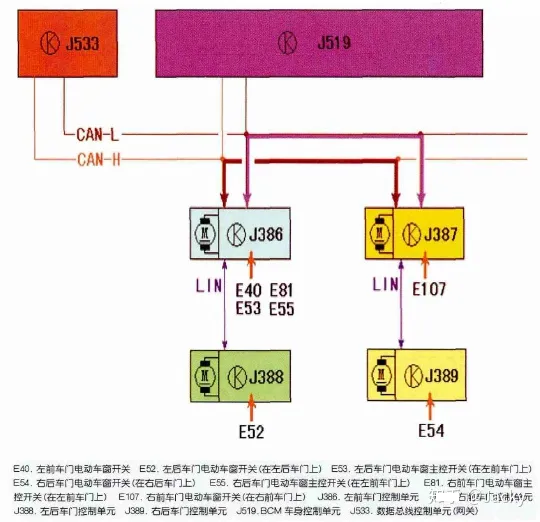
新途安车型舒适系统数据总线连接原理
钥匙锁止:使用钥匙锁止操作时,门锁单元(锁块)F220给驾驶员侧车门控制单元J386提供锁止信号。在J386的内部会执行一次数据传送检查,以确定锁止操作是否能被执行(如驾驶员车门是否已关闭)。
如果确认驾驶员车门已关闭,J386将锁止信息传送至自已的锁止单元F220(锁块)锁上驾驶员车门,同时信号通过数据总线CAN传送至BCM车身控制单元和前排乘客侧车门控制单元,以便执行锁止操作。
前排乘客侧车门控制单元收到锁止信息,控制锁止单元(锁块)锁止。BCM车身控制单元激活后行李舱盖及油箱盖电机并锁止,断开车内照明灯并激活防盗系统。如果钥匙保持在锁芯的锁止位置,车窗或天窗处于打开状态,会被自动关闭。
左后车门的锁止信息是由J386通过LIN数据线将锁止信息到传递到J388,J388收锁止信息后,控制本车门的锁止单元(锁块)将车门锁止。右后车门的锁止与左后车门的锁止过程类似。
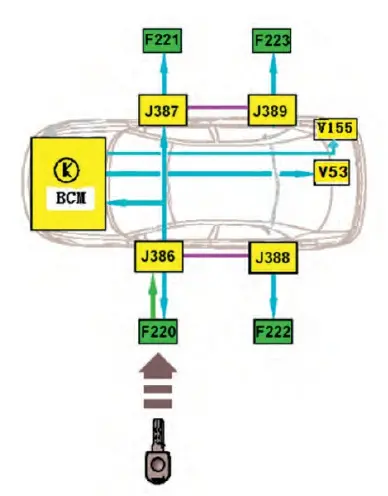
钥匙锁止操作
遥控锁止:使用遥控锁止操作时,BCM车身控制单元内部会执行一次数据传送检查,以确定锁止操作是否能被执行(如驾驶员车门是否已关闭、点火开关S触点是否断开),如果确认驾驶员车门已关闭且S触点已断开,BCM将锁止信息通过CAN数据线传送至驾驶员侧及前排乘客侧车门控制单元,以便执行锁止操作。
驾驶员侧及前排乘客侧车门控制单元收到锁止信息,控制锁止单元(锁块)锁止。BCM车身控制单元激活后行李箱盖及油箱盖电机,并锁止,同时断开车内照明灯并激活防盗系统。
左后车门的锁止信息是由J386通过LIN数据线将锁止信息传递到J388,J388收到锁止信息后,控制本车门的锁止单元(锁块)将车门锁止。右后车门的锁止与左后车门的锁止过程类似。
如果持续按住遥控按键保持在锁止位置,车窗或天窗处于打开状态,会被自动关闭。
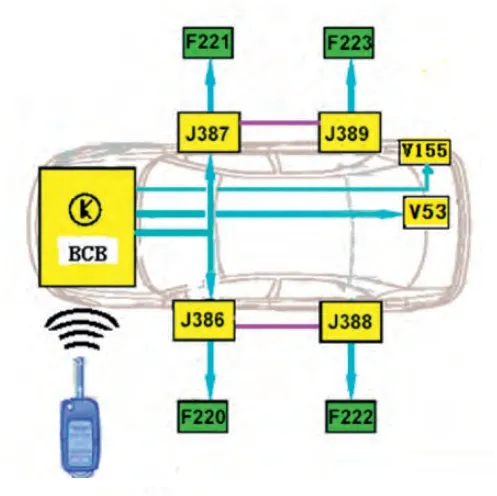
遥控锁止操作
中控锁止:使用车门饰板上的中控锁开关锁止操作时,中控锁开关E308将锁止信号传到驾驶员侧车门控制单元J386,在车门控制单元的内部会执行一次数据传送检查,以确定锁止操作是否能被执行(所有车门是否已关闭)。如有任何车门没有关闭,车门控制单元不会发出锁止命令,只有所有车门关闭,确定锁止操作能被执行,所有车门锁止单元(锁块)锁止。BCM车身控制单元同时激活后行李舱盖及油箱盖电机,并锁止。
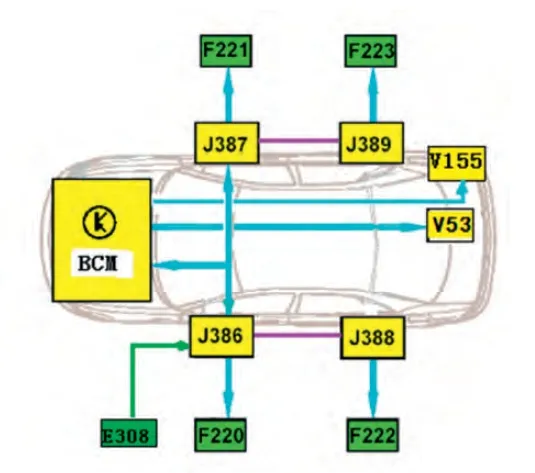
中控锁开关锁止操作
四、电动车窗防夹系统(Anti-Pinch System)
车窗防夹是汽车人性化的一个重要组成部分,其主要的功能是在车窗上升夹持到障碍物后,可以识别出车窗处于夹持状态,并令车窗回退释放夹持物,防止电机长时间堵转导致烧毁以及防止车辆乘员被夹伤。系统进行防夹判断(区分车窗正常运行状态和夹持状态)的参数的选取对于状态识别的准确性起着关键作用,对于不同型号的车窗,选取的参数一般不同。新安装的带防夹功能的车窗控制器需要通过一定的方法获得适合当前车窗的防夹参数,通常将该过程称为控制器与车窗的匹配。
目前欧洲和美国的通用标准都要求带有自动上升功能的车窗在发生夹持时,能够回退以解除夹持,并且最大夹持力不能超过
100N。
下图为车窗防夹区示意,仅在该区域内,防夹功能才会启动,以防止车窗触顶回退,保证正常关窗。在美国以及欧洲的安全性法规中,防夹区为车窗顶部密封条下沿4mm~200mm
处,即图中的标准防夹区。从车窗顶部到距离车窗顶部4mm的范围以及从距离车窗顶部到车窗底部的范围称作非防夹区域,即无防夹功能的区域。该区域内即使车窗上升时遇到障碍物,电机也不会反转,以保证车窗遇到车窗顶部的玻璃导轨胶条时会停止而不是反转。
非防夹区域以外的区域称作防夹区域,该区域车窗上升时遇到障碍物时,系统会采取防夹措施,电机反转一段距离后(如120mm-150mm)停止,以确保不会夹伤人体,如手、手臂等。同时也起到自保护作用,不会因过载而损伤电机。
车窗防夹区示意图
系统刚度:车窗上升时抵抗阻力的能力。
刚度计算公式Q=F/L:L为单位长度,F为车窗所遇阻力。
刚度的人性化含义:车窗防夹系统不能只注重防夹功能,还要从人性化的角度出发为使用者考虑。如果车窗在把人的手、头或其他部位夹疼甚至夹伤才采取防夹措施,那么防夹功能也就失去了本身的意义。比如有两个车窗防夹系统,当防夹力设定为80N时,一个系统的刚度为10N/mm,另一个系统的刚度为80N/mm,那么第一个系统在车窗夹到障碍物后又继续上升8mm才采取防夹措施,而第二个系统在车窗夹到障碍物后只上升1mm就采取防夹措施。可见虽然两个系统同样具有防夹功能,前者有可能对障碍物造成伤害。
系统灵敏度:系统的灵敏度表示车窗防夹系统对夹力检测的快慢程度。如果系统的灵敏度过高,那么系统对诸如用硬物敲击车窗所造成的短暂夹力,即伪夹力造成误判的可能性就会增大。
刚度与误防夹:误防夹是系统把非防夹力视为防夹力而采取防夹措施的行为,使系统造成误防夹的原因主要是伪夹力。伪夹力持续时间很短,夹力通常大于防夹力,对于刚度高的系统,系统的灵敏度也高,所以系统对时间短的伪夹力也能够检测得到,如果伪夹力的值大于防夹力,就会把伪夹力误判为防夹力而采取防夹措施,所以系统刚度越高,产生误防夹的可能性也越大。
1、常见防夹方法介绍
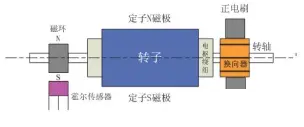
利用霍尔传感器的信号检测电机转速。由于霍尔脉冲信号的脉宽会随着电机转速的下降而增大,当检测到电机转速降低到一定程度时,即认为发生了夹持。
电机装置如下图所示,在转轴上安装磁环,靠近该磁环的霍尔元件装在控制器的板上,电机转子转动周,霍尔传感器产生一个周波的方波脉冲信号,利用内部时钟模块的输入捕捉功能捕捉信号个数,从而确定车窗玻璃的位置。
采用电机电流信号进行夹持识别。省去防夹模块中的霍尔传感器,通过在电机电路中串入采样电阻,可以通过采集电阻两端的电压间接获得电机的电枢电流。对电机的物理模型进行分析可知,车窗的受力近似与电机电流的大小成线性关系。在此基础上,上述方法通过检测电机电流曲线在一段时间内的积分值是否超过设定的阈值,以判断车窗是否发生了夹持。同时利用电流幅值的大小进行冗余判断,减小因为干扰发生误判断的可能。
电流识别夹持的改进方法,当车窗电机的供电来源是发电机时,直流上会叠加有交流成分,称为纹波电流。直流稳压电源一般是由交流电源经整流稳压等环节而形成的,这就不可避免地在直流量中多少带有一些交流成份,这种叠加在直流稳压量上的交流分量就称之为纹波。在电机的两极电压波动较小(12V±0.2V)的情况下,通过对纹波进行计数,可以获取车窗的位置,以此判断车窗是否处于防夹区内,结合纹波电流的频率与直流电流幅值识别夹持的发生。
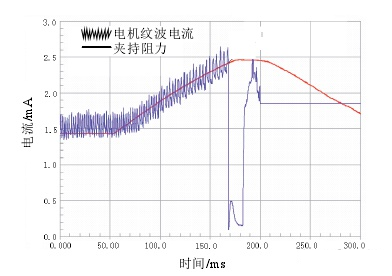
纹波电流识别夹持曲线
目前主流方法是结合霍尔信号和电流信号进行防夹判断。使用霍尔信号的脉冲个数描述车窗的位置,以此确定车窗是否处于防夹区内;通过比较当前电机电流与所设定电流阈值的大小,判断车窗是否受力过大,最终完成夹持识别。
下图为利用“电流-霍尔脉冲”方法进行防夹判断的整体方案示意。
首先建立车窗的位置坐标系,以下止点,即车窗向下运动所能达到的极限作为位置的零点,此即车窗底部。相应的上止点则为车窗高度,即车窗顶部,以Ha表示。由于电机每转一圈,霍尔传感器会输出固定个数的霍尔脉冲,可以以车窗处于下止点时为一变量p的零点,当车窗上升时,以传感器发出的脉冲高电平个数增大p,当车窗下降时,类似的减小p,则p的数值可以衡量车窗相对于下止点的距离,将其定义为车窗的位置。若车窗由下止点无中断到达上止点,则此时的脉冲个数可以代表车窗的最大行程,将其赋给Ha并记录下来,通过比较实时的p值与Ha,即可知道车窗是否处于防夹区。Ha即为防夹参数中的位置参数。
利用电流传感器输出的电机电流i反映车窗运行过程中的受力。可以设定i的上限阈值Ia,Ia即为防夹参数中的电流参数。
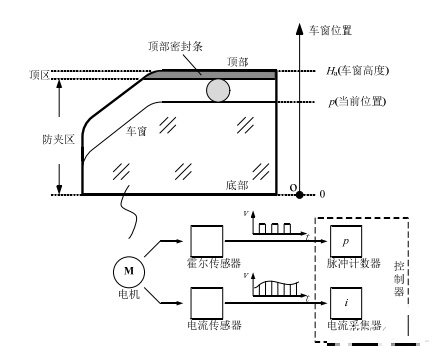
“电流-霍尔脉冲”防夹方法示意图
2、车窗防夹数据信息修复
受到温湿度的变化及沙尘、振动等对车窗的影响,车窗状态信息可能会出现不规则的变化。高低温主要影响整个传动系统以及电机本身的干摩擦和粘滞摩擦的大小,要在具体计算中进行运算补偿,实际上就是加一个固定偏置,这个偏置一般在低温情况下是正的,在高温情况下是负的,但在更准确和高级的控制系统里,这个补偿可能是非线性的函数。
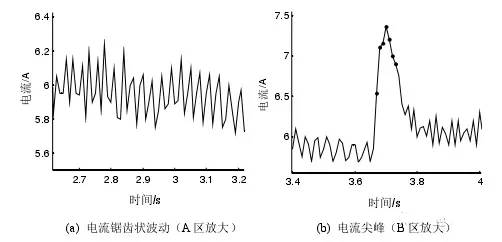
在密封条出现老化,有异物卡入导槽的使用条件下,通过临时延长历史数组的长度M的办法,记录车窗由底部上升至顶部的启停过程。完整的状态序列如下图所示。可见车窗位置随时间的变化较为规律,但是电流呈现出不规则的波动。
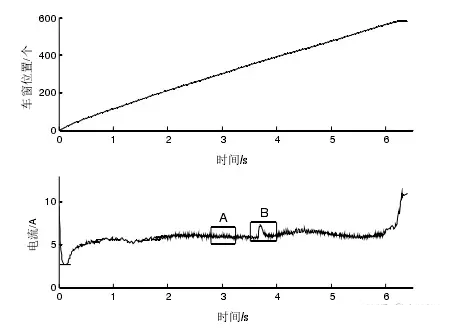
车窗上升全过程状态信息图
将信息图局部进行放大,可见电流存在如下图 (a)所示的锯齿状波动和如下图(b)所示的尖峰两种不规则的情况,黑点标示了形成尖峰的主要电流采样点。其中,锯齿状波动的幅度较小,且伴随车窗运行的全过程,主要由车窗运行中与密封条接触面的摩擦力变化、电源系统的波动及车窗本身的制造误差带来;尖峰数据则多为窗框存在异物或摩擦条发生较大变形,或汽车发生剧烈颠簸的情况下产生。
针对电流锯齿状波动,通常采用移动平均的方法获得其平滑轨迹。
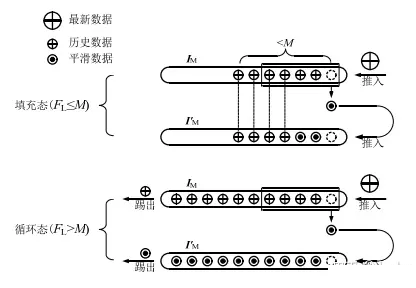
历史数组的实时平滑
针对电流尖峰,通常采用尖峰剔除的方式进行处理。具体操作为通过合理取定累积阶段的采样点个数λ,认为Dk反映了i(tk)的偏离值
dk在统计上的合理变化范围,将其定义为累积偏差,并取aDk做为dk的合理上限,其中 a>1。当dk满足式dk>aDk所示时,认为此时的i(tk)可能为一尖峰数据,此时可以进行尖峰剔除。
出现的尖峰数据剔除后,需要对缺失的数据进行修补,以保持数据记录的连贯性。为保留更多信息量以及提高实时性,进行修补计算的数据基础为原始电流信息IM而非平滑电流信息
I’M。为减小计算量,同时充分利用数据的短期变化趋势,这里采用二次指数平滑的方式进行预测,并用预测结果作为修复值。
通过在采集过程中不断的对电流信息进行平滑以及剔除尖峰,可以解决电流主要的两种不规则波动。采用实时修复方法之后,在车窗运行条件不变的情况下,获取的电流信息如下图所示。
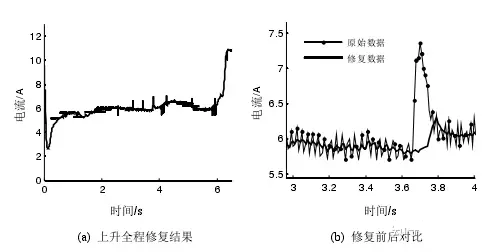
电流信息修复效果
3、防夹功能稳定性保持
在车窗使用过程中,防夹功能的长期稳定运行一直是防夹技术研究的重要内容,匹配过程进行大量实验收集基础数据也是为了保证这一点。但是由于导致车窗系统变化的因素较为复杂,匹配之后,车窗仍然会出现防夹参数失效导致的车窗功能故障。
目前通用的方式是通过预估车窗可能的工作环境,提前获取到在车窗各种工况下工作时,正常实现防夹功能的防夹参数,作为经验表提前写入控制器的方法。在此基础上,利用与车辆总线的通讯获取其他传感器信息,控制器据此判断车窗工况并由经验表提取相应的阈值,实现控制器参数对环境的适应。作为典型的防夹功能维护方法,该方法准备周期长,效果则取决于实验数据量以及其他传感器信号的准确性。
《车窗防夹控制器的自匹配与自学习-何虎》提到的自学习方案根据参数自动生成的方法,设计合理的自学习条件,当车窗完成符合条件的动作时,控制器即对过程中所获得的特征数据进行处理,生成新的防夹参数。通过多次自学习,累积防夹参数的历史数据,形成车窗自学习经验集。由经验计算自学习结果的合理范围,可以防止错误的学习结果。通过持续的电流自学习,不断更新位置和电流阈值,始终保持阈值相对于基础位置和电流有一合适的裕量,即可一直保持位置和电流阈值的适用。
自学习验证——位置参数更新验证
车窗位置记录的偏差主要是由于用户操作所引起,因此设计了一些可能的用户对车窗的典型操作,如表5-3所示。
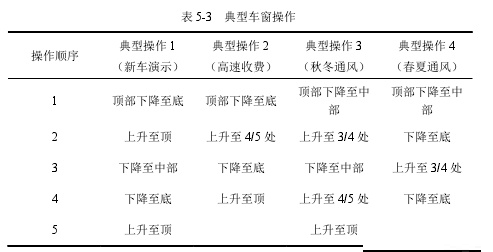
在一次或多次操作后,执行一次自动下降至底,然后自动上升至顶的车窗动作,形成一合理的自学习过程。连续进行多次试验,采集车窗高度自学习数据。
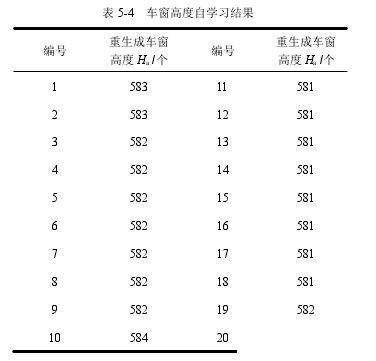
通过表5.4可见,车窗高度Ha数据变化不大,这说明到底标定对用户操作所造成的位置偏差进行了很好的修正,在此基础上,由于正常的系统误差导致车窗高度Ha有在使用中存在较小变化,一般来说,密封条宽度W多在20~40霍尔脉冲之间,大于Ha的短期变动。
自学习验证——电流参数更新验证
随着车窗的使用,电流信息呈现增大的趋势。这与机械结构磨损和摩擦条老化导致阻力增大的分析相吻合。对相应的电流曲线,采用自动匹配中的防夹参数生成方法,计算出各自当前的电流阈值Ia以及车窗平稳运行于防夹区内电流的最大值IX,数据对比结果如表5-5
所示。
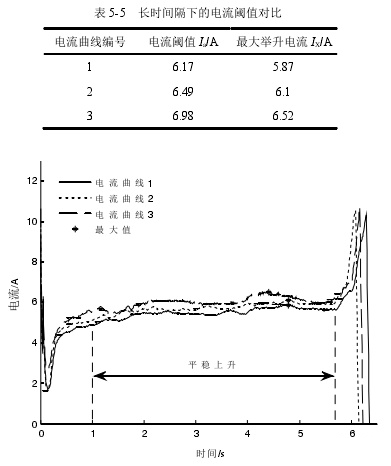
可见,在车窗电流处于曲线1的状态下完成匹配后,若不进行自学习过程,则当车窗系统变化至电流为曲线3的状态时,由于正常上升过程中的最大值6.52A已经超过了车窗处于曲线1状态时的电流阈值6.17A,因此将出现上升中的夹持误识别,即无障碍上升自动回退。同理,若车窗由曲线2时的状态变化至曲线3时的状态,使用原有阈值进行车窗状态区分也将导致车窗的误动作。
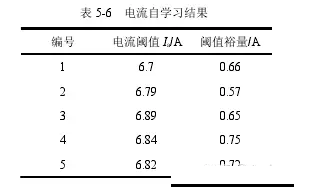
如表5-6所示为在一天内对车窗进行5次电流自学习的结果,可见在电流阈值有一定波动的情况下,始终保持了合适的裕量。裕量指阈值与该次车窗平稳上升段电流均值之间的差值。在持续的自学习情况下,电流阈值将会保持和基础电流相同的变化趋势,如此即可保持防夹参数的稳定,避免误动作的出现。
|







 订阅
订阅