| БрМЭЦМі: |
| БОЮФРДздгкwww.85kf.comЃЌЪзЯШДјЮвУЧСЫНтСЫЛюЖЏЭМЕФЪЧЪВУДЃЌдѕУДДДНЈЃЌФПЕФЪЧЪВУДЃЌНгзХЯъЯИНщЩмСЫЛюЖЏЭМЗНУцЁЃ |
|
ЛюЖЏЭМ
ЛюЖЏЭМЪЧФмЙЛгУРДДЋДяЯЕЭГЖЏЬЌааЮЊаХЯЂЕФШ§жжSysMLЭМжЎвЛЁЃЛюЖЏЭМПЩвдБэ ЪОИїжжИїбљЕФЛюЖЏЃЌЩѕжСПЩвдУшЪіИДдгЕФааЮЊЁЃЖдЯѓНкЕуПЩвдЭЈЙ§ЛюЖЏЖдЪТМўЁЂФм
СІКЭЪ§ОнЕФСїНЈФЃЃЌЪЙгУПижЦНкЕуПЩвдеЦПиЛюЖЏЕФжДааЁЃЛюЖЏЗжЧјПЩвдЮЊЯЕЭГНсЙЙЗж ХфЯЕЭГааЮЊЁЃ
1ЁЂФПЕФ
ЛюЖЏЭМЪЧвЛжжааЮЊЭМ;ЫќЪЧЯЕЭГЕФвЛжжЖЏЬЌЪгЭМЃЌЫЕУїЫцзХЪБМфЕФЭЦвЦааЮЊКЭЪТ МўЕФЗЂЩњађСаЁЃетгыНсЙЙЭМ(BDDЁЂ[BDКЭВЮЪ§ЭМ)ЯрЖдЃЌНсЙЙЭМЖМЪЧОВЬЌЪгЭМЃЌВЛ
ЛсБэДяШЮКЮЖЏЬЌЕФЪБМфЃЌЛђепЯЕЭГМАЦфЛЗОГЕФБфЛЏЁЃ
ЛюЖЏЭМЁЂађСаЭМКЭзДЬЌЛњЭМЪЧSysMLЬсЙЉЕФжИЖЈЯЕЭГааЮЊЕФШ§жжбЁдёЁЃЫљгаШ§ жжЭМЖМПЩвдБэДяСЌајКЭВЂЗЂЕФааЮЊЃЌвдМАЫцзХЪБМфЕФЭЦвЦЗЂЩњЕФЪТМўЁЃШЛЖјЃЌУПжжЭМ
ЖМгаЦфгХЕуКЭШБЕуЃЌФуашвЊИљОнПДЭМепЕФашЧѓНјаабЁдёЁЃ
ЛюЖЏЭМЬиБ№ЩУГЄЭЈЙ§ааЮЊБэЪОЖдЯѓЁЊЁЊЪТМўЁЂФмСПЛђепЪ§ОнЁЊЁЊЕФСїЖЏЃЌЙизЂЯЕ ЭГВйзїЪБЃЌЖдЯѓЪЧШчКЮдкааЮЊЕФжДааЙ§ГЬжаБЛЗУЮЪКЭаоИФЕФЁЃЫќЕФЙиМќгХЪЦдкгкПЩЖС
ад;ЛюЖЏЭМПЩвдБэДяИДдгЕФПижЦТпМЃЌетвЊБШађСаЭМКЭзДЬЌЛњЭМИќЧПЁЃСэЭтЃЌЛюЖЏЭМ ЪЧЮЈвЛФмЙЛЫЕУїСЌајЯЕЭГааЮЊЕФЭМЁЃ
ЛюЖЏЭМШЗЪЕвВДцдкШБЕуЃЌЫќТдЯдФЃК§ЁЃЛюЖЏЭМЫЕУїжДааЖЏзїЕФЫГађЃЌЫќУЧПЩвдга бЁдёЕиЫЕУїФФжжНсЙЙжДааСЫФФИіЖЏзїЁЃШЛЖјЫќУЧВЂУЛгаЬсЙЉШЮКЮЛњжЦРДЫЕУїФФИіНсЙЙ
ДЅЗЂФФИіЖЏзї(ЯрЖдЖјбдЃЌађСаЭМПЩвдЫЕУїЫљгаШ§жжаХЯЂ)ЁЃ
гЩгкЩЯЪідвђЃЌЕБгыРћвцЯрЙиепазїЖЈвхЮЪЬтПеМфЃЌВЂжИЖЈЯЕЭГЫљашвЊЕФааЮЊ ЪБЃЌНЈФЃепЛсЪЙгУЛюЖЏЭМзїЮЊЗжЮіЙЄОпЁЃЛюЖЏЭМЖдгкЯъЯИЩшМЦЁЊЁЊМДЪЪгУгкЯЕЭГЪЕЯжЕФЁЂУїШЗЕФааЮЊЫЕУїЁЊЁЊВЂВЛЪЧвЛжжЬиБ№гагУЕФЙЄОпЁЃ
2ЁЂКЮЪБДДНЈЛюЖЏЭМ
вђЮЊЛюЖЏЭМзїЮЊвЛжжЗжЮіЙЄОпЮЊгааЇЃЌЫљвддкФуашвЊКЭРћвцЯрЙиепЙЕЭЈЃЌЯывЊ ВЖЛёЯЕЭГМАЦфжДааепЦкЭћЕФааЮЊЪБЃЌЫќЪЧЪзЯШвЊДДНЈЕФааЮЊЭМЁЃФуЛЙЛсЪЙгУЛюЖЏЭМгы
ЭХЖгжаЕФЦфЫћГЩдБЙЕЭЈЃЌвдВЖЛёЯЕЭГФкВПзщГЩВПЗжЦкЭћЕФааЮЊЁЃМђЖјбджЎЃЌДДНЈЛюЖЏ ЭМВЂВЛЛсгыЯЕЭГЩњУќжмЦкЕФЬиЖЈНзЖЮАѓЖЈЁЃ
ФГаЉНЈФЃЗНЗЈЛсвЊЧѓФуДДНЈЛюЖЏЭМзїЮЊЭМаЮЛЏгУР§ЫЕУїЪщ(ЖдгкЕк5еТжаЬжТлЕФ ЮФзжЫЕУїЪщЃЌЛђепЪЧШЁЖјДњжЎЃЌЛђепЪЧзїЮЊВЙГф)ЁЃШчЙћетбљЪЕМљЃЌФЧУДФуОЭЛсдкЮЊ
ЯЕЭГФЃаЭЬэМгаТЕФгУР§ЪБДДНЈЛюЖЏЭМЁЃ
3ЁЂЛюЖЏЭМЭтПђ
ЛюЖЏЭМЕФРраЭЫѕаДЪЧactЁЃЦфжаЮЈвЛдЪаэЪЙгУЕФФЃаЭдЊЫиРраЭЪЧЛюЖЏЁЃЛюЖЏЭМЕФ ЭтПђБэЪОФудкЯЕЭГФЃаЭФГДІЖЈвхЕФЕЅИіЛюЖЏЁЃ
ЛюЖЏБОЩэЪЧвЛжжФЃаЭдЊЫиЁЃЫќЪЧвЛжжааЮЊЁЃЫќвВЪЧвЛжжУќУћПеМфЃЌКЭФЃПщвдМААќ РрЫЦЁЃвђДЫЫќПЩвдАќКЌвЛЯЕСаЯЕЭГВуМЖЙиЯЕжавбОУќУћЕФдЊЫиЁЊЁЊНкЕуКЭБпдЕЁЃФуПЩ
вддкЯрЙиСЊЕФЛюЖЏЭМЕФЭтПђФкЯдЪОФЧаЉАќКЌЕФдЊЫиЁЃ
ФувЊжЊЕРЃЌЛюЖЏКЭЛюЖЏЭМВЂВЛвЛбљЁЃЕБЪЙгУЛюЖЏетИіЪѕгяЕФЪБКђЃЌЮвжИЕФЪЧвЛ ИіФЃаЭдЊЫиЃЌЖјВЛЪЧЯрЙиЕФЭМЁЃЧыЛиЙЫвЛЯТЕк2еТЛљгкФЃаЭЙЄГЬЕФЛљБОИХФюЃКФЃ
аЭЕФЭМгРдЖЖМВЛЪЧФЃаЭБОЩэ;ЫќжЛЪЧФЃаЭЕФвЛжжЪгЭМЁЃдкФуЕФЯЕЭГжаЖЈвхвЛИіЛю ЖЏЃЌЖјВЛАбЫќЯдЪОдкЛюЖЏЭМжаЃЌЪЧЭъШЋУЛгаЮЪЬтЕФЁЃЕЋДѓЖрЪ§ЧщПіЯТЃЌФуЖМЛсЯд
ЪОЫќЁЃ
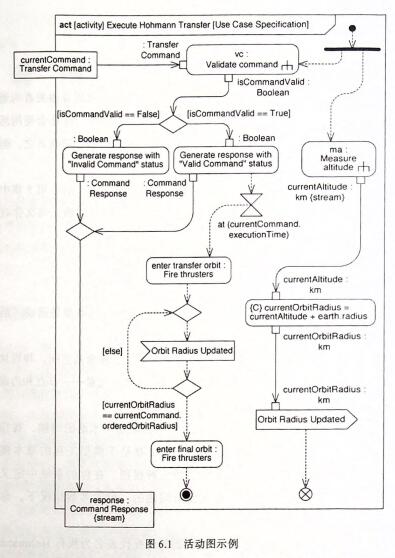
ЭМ6.1жаЕФЭМЭЗВПИцЫпЮвУЧЃЌетИіЛюЖЏЭМЕФЭтПђДњБэУћЮЊжДааHohmannзЊЛЛЕФ ЛюЖЏЃЌЫќДцдкгкФЃаЭВуМЖЙиЯЕжаЕФФГДІЁЃетИіЭМЕФУћГЦЪЧЁАгУР§ЫЕУїЪщЁБЁЃетИіУћГЦ
ДЋДяСЫЭМЕФФПЕФЃКзїЮЊЭЌбљУћГЦЕФгУР§ЕФЭМаЮЛЏЫЕУїЁЃ
 ЁЁ ЁЁ
4ЁЂЙигкСюХЦСїЕФвЛИіДЪ
ЙсДЉБОеТЃЌЮвЖМЛсЪЙгУСюХЦетИіЪѕгяЃЌвђЮЊЛюЖЏЪЧНЈСЂдкСюХЦСїЕФИХФюжЎЩЯЕФЁЃ ВЂЧвЃЌеыЖдЛюЖЏжаИїжжРраЭЕФНкЕуКЭБпдЕЕФЙцдђвВЪЧгУСюХЦСїетИіЪѕгяЫЕУїЕФЁЃ
СюХЦСїЪЧвЛжжГщЯѓЕФИХФюЁЃСюХЦВЛЪЧФЃаЭдЊЫиЃЌФуВЛЛсдкЯЕЭГФЃаЭжаДДНЈЫќУЧЃЌФувВВЛЛсдкЛюЖЏЭМжаЯдЪОЫќУЧЁЃСюХЦЕФЯыЗЈКЭSysMLЙигкЛюЖЏЁЂНкЕуКЭБпдЕЕФЖЈвх
НєУмЯрЙиЁЃФуБиаывРРЕгкФуЕФЯыЯѓРДРэНтЛюЖЏжаЕФСюХЦСїЃЌЖјФЧИіЛюЖЏЛсИјгшИїжжРр аЭНкЕуКЭБпдЕЕФЙцдђЁЃ
ЮвЗЂЯжвЛжжгажњгкРэНтСюХЦИХФюЕФЗНЗЈЃЌОЭЪЧАбСюХЦЕБзїТЂЖЯгЮЯЗПЈЃЌЫќЛсдкЛю ЖЏЭМжЎМфвЦЖЏЃЌПчдНБпдЕЃЌДгвЛИіНкЕуЕНСэвЛИіНкЕуЁЃПЩвдгаЖрИіСюХЦСїЖЏЭЈЙ§ЛюЖЏ
ЕФвЛДЮжДааЁЃУПИіСюХЦЖМЛљгкЦфБОЩэЕФРраЭКЭзДЬЌЃЌЖЈвхЛюЖЏЕФЖЏзїКЭПижЦТпМвдМА дкЛюЖЏжДааЙ§ГЬжаЗЂЩњЕФЪТМўЃЌВЛвРРЕЦфЫћСюХЦНјаавЦЖЏЁЃ(ЧыЯраХЮвЃЌЫљгаетаЉФк
ШнЖМЛсдкКѓајЕФеТНкжаБфЕУИќЧхЮњЁЃ)
СюХЦДњБэЕФЪЧЪВУДФи?Д№АИАќРЈСНИіВПЗжЁЃЪзЯШЃЌгаСНжжРраЭЕФСюХЦЃКЖдЯѓСюХЦ КЭПижЦСюХЦЁЃЮвДгМђЕЅЕФПЊЪМНщЩмЁЃ
ЖдЯѓСюХЦДњБэЕФЪЧдкЛюЖЏжаСїЖЏЕФЪТМўЁЂФмСПЛђепЪ§ОнЕФЪЕР§ЁЃЫќПЩвдДгзмЬхЩЯ ДњБэвЛИіЛюЖЏЕФЪфШЫЛђепЪфГіЃЌВЂЧвПЩвдДњБэЛюЖЏжавЛИіЖЏзїЕФЪфШЫЛђЪфГіЁЃе§ЪНЕФ
ЫЕЗЈЪЧЃЌвЛИіЖдЯѓСюХЦДњБэФудкФЃаЭВуМЖЙиЯЕжаФГДІДДНЈЕФФЃПщЁЂжЕРраЭЛђепаХКХЕФ ЪЕР§(вдЖЈвхЪТМўЁЂФмMЛђепЪ§ОнЕФРраЭ)ЁЃе§ШчФуПЩФмЦкЭћЕФЃЌЛсгаЖрИіЖдЯѓСюХЦ
СїЖЏЭЈЙ§ЛюЖЏЕФЕЅДЮжДааЁЃ
ПижЦСюХЦЁЁЪВУДЖМВЛДњБэЁЃЮвЪЧЫЕВЛДњБэШЮКЮЮяРэЕФЖЋЮїЁЃЫќУЛгаРраЭ(ФЃ ПщЁЂжЕРраЭЛђепаХКХ)ЁЃПижЦСюХЦжЛБэЪОЛюЖЏЕФФФИіЖЏзїдкЛюЖЏжДааЕФЬиЖЈЪБПЬДІгк
ЦєгУзДЬЌЁЃПЩФмЛсгаЖрИіПижЦСюХЦСїЙ§ЛюЖЏЕФЕЅДЮжДааЁЃФЧбљвтЮЖзХЛюЖЏжаЕФЖрИіЖЏ зїЭЌЪБДІгкЦєгУзДЬЌЁЃ
ЮвжЊЕРЯждкетЛЙЗЧГЃГщЯѓЃЌЕЋдкПЊЪМЕФЪБКђгаСЫетаЉЛљДЁЃЌФуЛсИќКУЕиРэНтБО еТЩдКѓЕФР§згЁЃдкЮвЬжТлФмЙЛГіЯждкЛюЖЏЭМжаИїжждЊЫиЕФЪБКђЃЌОЭЛсИљОнСюХЦСїЫЕ
УїФЧИідЊЫиЕФЙцдђЁЃЙцдђгаКмЖр;ПЊЪМПДЦ№РДЛсШУШЫВЛжЊЫљДыЁЃЕЋЫцзХФуВЛЖЯдФЖС КЭДДНЈЛюЖЏЭМЃЌОЭЛсТ§Т§ДгећЬхЩЯРэНтЙцдђЕФвтвхЃЌФужеПЩвдНтЪЭКЭЫЕУїИДдгЕФ
ЯЕЭГааЮЊЁЃ
5ЁЂЛљБОЖЏзї
ЖЏзїЪЧвЛжжПЩвдДцдкгкЛюЖЏжЎжаЕФНкЕуЃЌЫќЪЧЮЊЛюЖЏЛљБОЕФЙІФмЕЅдЊНЈФЃЕФНк ЕуЁЃвЛИіЖЏзїДњБэФГжжРраЭЕФДІРэЛђепзЊЛЛЃЌЫќЛсдкЯЕЭГВйзїЙ§ГЬжаЛюЖЏБЛжДааЕФЪБКђЗЂЩњЁЃ
ЛљБОЖЏзїЕФБъЪЖЗЈЪЧдВНЧОиаЮЁЃЮвЫЕЁАЛљБОЁБЃЌЪЧвђЮЊгаЖржжЬиЪтРраЭЕФЖЏзїЃЌ УПИіЖМгаЦфздЩэЕФБъЪЖЗЈ(ИќЖрФкШнЧыМћ6.8Нк)ЁЃ
ФуПЩвддкЛюЖЏжаЪфШЫШЮКЮЯывЊЕФааЮЊУшЪіЁЃФуЕФУшЪіЛсЯдЪОЮЊЛюЖЏЭМЩЯдВНЧОиаЮ жаЕФзжЗћДЎЁЃГЃМћЕФЪЧЃЌЯЕЭГНЈФЃепЛсАбЖЏзїаДГЩгУздШЛгябд(ЯёгЂгя)БэЪіЕФЖЏ
ДЪЖЬгяЁЃЭМ6.2ЯдЪОСЫвЛИіЪОР§ЁЃ
 ЁЁ ЁЁ
ОЁЙмSysMLВЛвЊЧѓЃЌЕЋЮвЛЙЪЧНЈвщЃЌКУАбЖЏзїаДГЩвЛИіЖЬгяЃЌгЩгаСІЁЂЮоЦчвхЕФЖЏДЪПЊЪМЁЃСэЭтЃЌФугІИУБмУтАбЖрИіЖЏДЪЗХдквЛИіЖЏзїжа.ЖјгІИУАбЫќЗжНтГЩЖрИіЖЏзїЁЃР§ШчЃЌВЛвЊаДЁАбщжЄВЂБЃДцУќСюЁБЃЌЖјгІИУДДНЈСНИіСЌајЕФЖЏзїЃКЁАбщжЄУќСюЁБКЭЁАБЃДцУќСюЁБЁЃ
ШчЙћВЛЪЙгУздШЛгябдЃЌФуЛЙПЩвдЪЙгУе§ЪНЕФБрГЬгябд(ЯёCЁЂJavaЁЂVerilogЛђепModelica)РДУшЪіЛюЖЏЭМжаЕФЖЏзїЁЃSysMLАбетбљЕФЩљУїНазіВЛЭИУїБэДяЪНЁЃетИіГЦКєВЂВЛживЊЃЌЕЋЪЧФугІИУжЊЕРВЛЭИУїБэДяЪНгаСНИіВПЗжЃКгябдКЭжїЬхЁЃФуЛсЪЙгУЛЈРЈКХРДжИЖЈгябдЃЌЫќЮЛгкжїЬхжЎЧАЁЃЭМ6.3ЯдЪОСЫДјгаВЛЭИУїБэДяЪНЕФЖЏзїЕФР§згЃЌЫќгЩcгябдБраДЁЃ(ЕЋзЂвтЃЌВЛЭИУїБэДяЪНВЂВЛЪЧжЛФмЪЙгУБрГЬгябдЁЃ)
 ЁЁ ЁЁ
ЯЕЭГНЈФЃепКмЩйЛсАбЖЏзїаДГЩВЛЭИУїБэДяЪНЁЃПЊЗЂЭХЖгЛсОГЃдкЛюЖЏЭМжаетУДзіЃЌДДНЈФЧаЉЭМгУгкЙЕЭЈЫћУЧЕФЩшМЦЁЃЕЋЪЧЃЌФЧаЉПЊЗЂЭХЖгЕФРћвцЯрЙиепашвЊжЊЕРШчКЮНтЪЭАќКЌВЛЭИУїБэДяЪНЕФЛюЖЏЭМЁЃ
вЛИігагУЧвгавтвхЕФЛюЖЏзмЪЧЛсАќКЌвЛИівдЩЯЖЏзї(ШчЭМ6.1ЫљЪО)ЁЃФуЛсЪЙгУБпдЕРДСЌНгЛюЖЏжаЕФЖЏзїЃЌБпдЕЛсЖЈвхХХКУађЕФ(гаЪБЪЧВЂЗЂЕФ)ађСаЁЃФЧаЉађСаЛсДгећЬхЩЯУшЪіЛюЖЏЁЃКЭЕк5еТжаЕФЫЕУїЮФзжУшЪівЛбљЃЌКУЕФЛюЖЏЭМБэЪіЧхЮњЁЃ
ФуЪЙгУЛюЖЏЭМБэЪіЕФВЛНіНіЪЧЖЏзїЕФађСа;ЫќЛЙПЩвдБэДяЖдЯѓСїЁЊЁЊзмЬхЩЯРДЫЕОЭЪЧФЧаЉЖЏзїКЭЛюЖЏЕФЪфШЫКЭЪфГіЁЃ(ФуПЩвддкЯТвЛНкжаПДЕНИќЖрЙигкетИіЮЪЬтЕФаХЯЂЁЃ)
6ЁЂЖдЯѓНкЕу
ЖдЯѓНкЕуЪЧСэвЛжжФмЙЛДцдкгкЛюЖЏжЎжаЕФНкЕуЃЌЫќЛсЖдЖдЯѓСюХЦЭЈЙ§ЛюЖЏЕФСїНЈ ФЃ(ЦфжаЖдЯѓСюХЦДњБэЕФЪЧЪТМўЁЂФмСПЛђепЪ§ОнЕФЪЕР§)ЁЃЖдЯѓНкЕуГЃГіЯждкСНИі
ЖЏзїжЎМфЃЌвдБэЪОЕквЛИіЖЏзїЛсВњГіЖдЯѓСюХЦзїЮЊЪфГіЃЌЕкЖўИіЖЏзїЛсНЋетаЉЖдЯѓСю ХЦзїЮЊЪфШЫЁЃ
ЖдЯѓНкЕуЕФБъЪЖЗЈЪЧвЛИіОиаЮЁЃЯдЪОдкЖдЯѓНкЕужаЕФУћГЦзжЗћДЎЛсгЕгаЯТУцЕФИёШыЃК
 ЁЁ ЁЁ
ЖдЯѓНкЕуУћГЦЪЧНЈФЃепЖЈвхЕФЃЌРраЭБиаыгыФудкФЃаЭВуМЖЙиЯЕжаФГДІЖЈвхЕФФЃ ПщЃЌжЕРр?ЛђепаХКХЕФУћГЦЦЅХфЃЌЫќЛсжИЖЈЖдЯѓНкЕуФмЙЛГжгаЕФЖдЯѓСюХЦРраЭЁЃЖржи
адЛсжИЖЈЃЌдкЛюЖЏЕФжДааЙ§ГЬжаЕФЬиЖЈЪБПЬЃЌЖдЯѓНкЕуФмЙЛГжгаЖрЩйИіЖдЯѓСюХЦЁЃШч ЙћдкУћГЦзжЗћДЎжаУЛгаЯдЪОЃЌФЧУДЖдЯѓНкЕуФЌШЯЖржиадЮЊ1..1ЁЃ
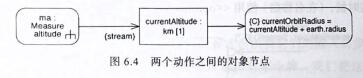
ЭМ6.4жаЕФЛюЖЏЦЌЖЮЯдЪОСЫУћЮЊcurrentAltitudeЕФЖдЯѓНкЕуЁЃЫќГжгаДњБэжЕРраЭ kmЕФЪЕР§ЕФЖдЯѓСюХЦЁЃзжЗћДЎФЉЮВЕФЖржиадБэЪОЃЌЕквЛИіЛюЖЏжЛЛсВњГівЛИіЖдЯѓСю
ХЦзїЮЊЪфГіЃЌЖјЕкЖўИіЖЏзїжЛашвЊвЛИіЖдЯѓСюХЦзїЮЊЪфШЫ(вдБуЦєЖЏ)ЁЃ
 ЁЁ ЁЁ
ЖдЯѓНкЕуСэвЛИігагУЕФЬиадЪЧЃЌЫќПЩвдбЁдёЯдЪОЗжИєПђвЛОЭЯёФЃПщЛђепзщГЩВП ЗжЪєадвЛбљЁЊЁЊРДБэЪОЫќГжгаЕФЖдЯѓСюХЦЕФФкВПЪєадЁЃЕБШЛЃЌжЛгадкжИЖЈЕФРраЭ(ФЃ
ПщЁЂжЕРраЭЛђепаХКХ)еце§гЕгаФкВП
адЕФЪБКђЃЌетВХеце§гагУЁЃдЪМжЕРраЭЃЌЯё km,ИљБООЭВЛашвЊЁЃ
6.1 ЫЈ
ЫЈ(pin)ЪЧвЛжжЬиЪтРраЭЕФЖдЯѓНкЕуЁЃФуЛсАбЫЈИНМгЕНЖЏзїЩЯЃЌБэЪОЖЏзїЕФЪфШы ЛђЪфГіЁЃЫЈЕФБъЪЖЗЈЪЧИНзХдкЖЏзїЭтБпНчЩЯЕФаЁЗНПщЃЌШчЭМ6.5ЫљЪОЁЃ
 ЁЁ ЁЁ
ФуПЩвдбЁдёдкЗНПщФкВПЯдЪОвЛИіМ§ЭЗЃЌвджИЖЈЫЈДњБэЕФЪЧЪфШЫЛЙЪЧЪфГіЁЃЕЋШчЙћ ФугУБпдЕАбСНИіЫЈСЌНгдквЛЦ№ЃЌФЧУДетОЭЪЧЖргрЕФЃЌЖјДѓЖрЪ§ЪБКђФуЖМЛсетУДзіЁЃЫЈ
ЕФУћГЦзжЗћДЎИёЪНКЭЖдЯѓНкЕувЛбљЃЌЕЋЫќЛсЯдЪОдкЫЈЕФИННќЃЌЖјВЛЪЧЯдЪОдкЫЈжа(д вђЯдЖјвзМћ)ЁЃ
ЭМ6.5жаЕФЛюЖЏЦЌЖЮЪЧЭМ6.4жаЫљЯдЪОЕФЭЌвЛИіФЃаЭЕФСэвЛжжЪгЭМЁЃЫЈЕФвтвхКЭ ЖдЯѓНкЕувЛбљ;ЫЈжЛЪЧФуПЩвдИљОнОпЬхЧщПібЁдёЕФСэвЛжжБъЪЖЗЈЃЌвдТњзуПДЭМепЕФЬиЪташЧѓЁЃУПжжЗНЪНЖМгагХЕуКЭШБЕуЁЃ
ЖдЯѓНкЕуБъЪЖЗЈПЩвдЯдЪОЗжИєПђЃЌвдБэЪОЫќЫљГжгаЕФЖдЯѓСюХЦЕФФкВПЪєадЁЃШЛ ЖјЃЌЫќвЊБШЫЈБъЪЖЗЈеМОнЛюЖЏЭМжаИќЖрПеМфЁЃЫЈБъЪЖЗЈЮоЗЈЯдЪОЗжИєПђЃЌЕЋетжжБъЪЖ
ЗЈИќНкЪЁПеМфЁЃзїЮЊЙцдђЃЌЮвНЈвщбЁдёЫЈБъЪЖЗЈзїЮЊФЌШЯЕФбЁЯюЃЌжЛгадквЛаЉВЛГЃМћ ЕФГЁКЯЃЌЕБФуашвЊЯдЪОЖдЯѓСюХЦЕФФкВПЪєадЕФЪБКђЃЌВХЪЙгУЖдЯѓНкЕуБъЪЖЗЈЁЃ
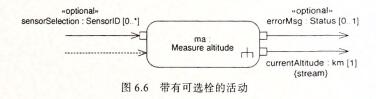
ЭМ6.6ЯдЪОСЫЪфШЫЫЈКЭЪфГіЫЈЕФР§згЃЌУПИіЫЈЖМгЕгаЯТЯоЮЊСуЕФЖржиадЁЃетЪЧФу ЖдгЕгаПЩбЁЪфШЫЛђЪфГіЕФЖЏзїНЈФЃЕФЗНЪНЁЃДјгаПЩбЁЪфШЫЫЈЕФЖЏзїЩѕжСПЩвддкУЛгаШЮ
КЮЖдЯѓСюХЦЮЛгкФЧИіЫЈжаЕФЪБКђЦєЖЏЁЃДјгаПЩбЁЪфГіЫЈЕФЖЏзїПЩвджДааЃЌВЂЧвдкФЧИі ЫЈжаПЩФмВЛВњГіШЮКЮЖдЯѓСюХЦЁЃОЁЙмФЧЪЧШпгрЕФЃЌЕЋSysMLвЊЧѓФуЃЌЕБЫЈЕФЖржиад
ЯТЯоЪЧСуЕФЪБКђЃЌ(дкУћГЦЧА)ЪЙгУ <optional>дЊРраЭЁЃ
 ЁЁ ЁЁ
6.2ЛюЖЏВЮЪ§
ЛюЖЏВЮЪ§ЪЧСэвЛжжЬиЪтРраЭЕФЖдЯѓНкЕуЁЃФуЛсАбЫќИНМгЕНЛюЖЏЭМЕФЭтПђЩЯЃЌДгзм ЬхЩЯБэЪОЛюЖЏЕФвЛжжЪфШЫЛђепЪфГіЁЃЛюЖЏВЮЪ§ЕФБъЪЖЗЈЪЧКсПчдкЛюЖЏЭМЭтПђЩЯЕФОи
аЮЃЌШчЭМ6.7ЫљЪОЁЃЛюЖЏВЮЪ§ЕФУћГЦзжЗћДЎЕФИёЪНКЭЖдЯѓНкЕу(вдМАЫЈ)ЯрЭЌЁЃ
SysMLВЛЛсжИЖЈФуБиаыдкЭМЭтПђЕФЪВУДЕиЗНЗХжУЛюЖЏВЮЪ§ЁЃШЛЖјЃЌвЛжждМЖЈЫзГЩ ЕФНЈФЃЗНЗЈЪЧАбЪфШЫЛюЖЏВЮЪ§ЗХдкЭтПђЕФЖЅВПЛђепзѓБпЃЌЪфГіЛюЖЏВЮЪ§ЗХдкЕзВПЛђеп
гвБпЁЃЪТЪЕЩЯЃЌЮЈвЛФмЙЛИцЫпЮвУЧЧјБ№ЕФОіЖЈадЗНЪНЃЌОЭЪЧСЌНгдкЛюЖЏВЮЪ§ЩЯЕФБпдЕ ЕФЗНЯђЁЃ
КЭЫЈРрЫЦЃЌЛюЖЏВЮЪ§ФмЙЛгЕгаЕФЕЭЖржиадЪЧ0ЁЃзмЕФРДЫЕЃЌетЪЧФуШчКЮЮЊЛюЖЏНЈСЂвЛжжПЩбЁВЮЪ§ЕФФЃаЭЕФЗНЪНЁЃЖдгкДјгаПЩбЁЪфШЫЛюЖЏВЮЪ§ЕФЛюЖЏ(Р§ШчЃК
sensorSelection),МДБудкФЧИіВЮЪ§жаУЛгаШЮКЮЖдЯѓСюХЦЃЌЫќвВПЩвдЦєЖЏЁЃДјгаПЩбЁЪф ГіЛюЖЏВЮЪ§ЕФЛюЖЏ(Р§ШчЃКerrorMsg)ПЩвджДааЃЌВЂПЩФмВЛЛсЭЈЙ§ФЧИіВЮЪ§ЯђДЅЗЂЛю
ЖЏЕФПЭЛЇЖЫЗЕГіиШЮКЮЖдЯѓЁЃКЭЫЈвЛбљЃЌЕБЛюЖЏВЮЪ§ЕФЕЭЖржиадЪЧСуЕФЪБКђЃЌSysML вЊЧѓФудкЦфжЎЧА(УћГЦЧАУц)в§гУ
<optional>дЊРраЭЁЃ
 ЁЁ ЁЁ
ЭЈЙ§ЭМ6.6КЭЭМ6.7жаЕФР§згЃЌФуПЩФмЛсЭЦЖЯГіЃЌдкЫЈКЭЛюЖЏжЎМфПЩФмЛсгаЙиСЊЁЃ 6.8НкЛсЬжТлФЧжжЙиСЊЕФЯИНкЁЃ
6.3СїгыЗЧСї
ФЌШЯЧщПіЯТЃЌЖЏзїКЭЛюЖЏжЛгадкжДааЕФЪБКђВХЛсЯћЗбЫќУЧЕФЪфШыЖдЯѓСюХЦЁЃРр ЫЦЕиЃЌжЛгадкЭъГЩжДааЕФЪБКђЃЌЫќУЧВХЛсНЛИЖЪфГіЖдЯѓСюХЦЁЃЮвУЧАбетНазіЗЧСї
(nonstreaming)ЕФааЮЊЁЃ
ШЛЖјЃЌФуЫљЩшМЦГіРДЕФЯЕЭГааЮЊВЛЛсзмЪЧШчДЫЃЌгаЪБЫќУЧЩѕжСЛсдкааЮЊГжајжДаа ЕФЪБКђНгЪмЪфШЫКЭВњЩњЪфГіЁЃЮвУЧАбетНазіСї(streaming)ааЮЊЁЃФуПЩвддкЫЈЛђепЛю
ЖЏВЮЪ§ЕФУћГЦзжЗћДЎКѓУцжИЖЈ[stream],ДгЖјЮЊСїааЮЊНЈФЃЁЃ
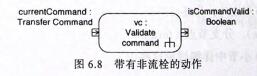
ШУЮвУЧЪзЯШПДвЛЯТЗЧСїЕФЧщПіЁЃЭМ6.8ЯдЪОСЫвЛИіЖЏзїЃЌЫќДјгавЛИіЗЧСї ЕФЪфШЫЫЈвдМАвЛИіЗЧСїЕФЪфГіЫЈЁЃЕБРраЭЮЊДЋЪфУќСюЕФЖдЯѓСюХЦЕНДяЪфШЫЫЈ
currentCommandЕФЪБКђЃЌЖЏзїvcОЭЛсПЊЪМжДааЃЌВЂЯћЗбФЧИіЖдЯѓСюХЦЁЃШчЙћдкvc ЛЙдкжДааЕФЪБКђЃЌгжгавЛИіДЋЪфУќСюЕФЪЕР§ЕНДяЪфШЫЫЈЃЌФЧУДжБЕНvcЭъГЩШЛКѓдйДЮ
ЦєЖЏЕФЪБКђЃЌЕкЖўИіЪЕР§ВХЛсБЛЯћЗбЁЃ
 ЁЁ ЁЁ
ЕБvcжДааЕФЪБКђЃЌЫќЛсдкФкВПЩњГЩРраЭЮЊBooleanЕФЖдЯѓСюХЦЃЌЕЋЪЧдкvcЭъГЩжДаажЎЧАЃЌФЧИіЖдЯѓСюХЦЖМВЛЛсБЛЗЂЫЭЕНЪфГіЫЈisCommandValidЩЯЁЃФЧбљЃЌдкvcЭъГЩжЎЧАЃЌШЮКЮИњЫцvc
(ВЂвдФЧИіBooleanжЕзїЮЊЪфШЫ)ЕФЖЏзїЖМВЛЛсПЊЪМжДааЁЃ
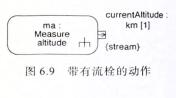
ФЧЪЧЗЧСїЕФЧщПіЁЃЯждкШУЮвУЧПДвЛЯТСїЕФЧщПіЁЃЭМ6.9ЯдЪОСЫвЛИіЖЏзїma,ЫќгЕгаСїЪфГіЫЈcurrentAltitudeЁЃЕБmaжДааЕФЪБКђЃЌЫќЛсдкФкВПЩњГЩвЛИіРраЭЮЊkmЕФЖдЯѓСюХЦЁЃФЧИіЖдЯѓСюХЦЛсЗЂЫЭЕНЪфГіЫЈЩЯЃЌМДБуmaе§дкжДааЁЃетбљЃЌИњЫцma
(ВЂвЊЧѓkmжЕзїЮЊЪфШЫ)ЕФЖЏзїЖМПЩвдПЊЪМжДааЃЌМДБуmaШдШЛдкГжајжДаа(ВЂПЩФмВњЩњЦфЫћЖд ЯѓСюХЦ)ЁЃетЪЧЮЊСНИіЛђЖрИіВЂааЖЏзїНЈФЃЕФвЛжжЗНЪНЁЃСїдкЖЏзїЕФЪфШЫЖЫгазХРрЫЦЕФвтвхЁЃЕНДяСїЪфШЫЫЈЕФЖдЯѓСюХЦЛсТэЩЯЮЊЖЏзїЫљ
гУЃЌМДБуЫќгЩгкжЎЧАЕНДяЕФЖдЯѓСюХЦвбОПЊЪМжДаа
 ЁЁ ЁЁ
СїКЭЗЧСїдкЛюЖЏВЮЪ§ЕФЧщОГЯТКЭдкЫЈЕФЧщПіЯТгазХЭЌбљЕФвтвхЃЌжЛЪЧгІгУИјЛюЖЏ ЕФЙцдђгаЫљВЛЭЌЁЃСїЫЈКЭЛюЖЏВЮЪ§ШУФуПЩвдЖдГжајЕФЯЕЭГааЮЊНЈФЃЁЃ
7ЁЂБп
ЛюЖЏПЩвдАќКЌСНжжвЛАуРраЭЕФдЊЫиЃКНкЕуКЭБпЁЃЩЯвЛНкНщЩмСЫСНжжНкЕуЃКЖЏзїКЭ ЖдЯѓНкЕуЁЃБОНкЛсНщЩмСНжжБпЃЌФуПЩвдЪЙгУЫќУЧРДСЌНгНкЕуЃЌДгЖјдкЛюЖЏжааЮГЩгаађ
ЕФађСаЃКЖдЯѓСїКЭПижЦСїЁЃ
7.1ЖдЯѓСї
ЖдЯѓСїЪЧвЛжжБпЃЌЫќЛсДЋЪфЖдЯѓСюХЦЁЃЪЙгУЖдЯѓСїЃЌПЩвдБэЪОЪТМўЁЂФмСПЛђеп Ъ§ОнЕФЪЕР§ЭЈЙ§ЛюЖЏЃЌдкЯЕЭГВйзїЙ§ГЬжаЛюЖЏжДааЕФЪБКђЃЌДгвЛИіНкЕуЯђСэвЛИіНк
ЕуСїЖЏЁЃ
ЖдЯѓСїЕФБъЪЖЗЈЪЧДјгаМ§ЭЗЕФЪЕЯпЁЃЖдЯѓСївЛАуЛсАбСНИіЖдЯѓНкЕуСЌНгдквЛЦ№ЁЃ
ЕЋЪЧЃЌГ§СЫЖдЯѓНкЕужЎЭтЃЌФуЛЙПЩвддкЖдЯѓСїЕФвЛЖЫгЕгаОіЖЈНкЕу(decision node)ЁЂ КЯВЂНкЕу(merge
node)ЁЂЗжжЇНкЕу(fork node)КЭећКЯНкЕу(join node),РДжИЪОЖдЯѓ СюХЦЕФСїЁЃЮвЛсдк6.9аЁНкжаЯъЯИЬжТлетаЉФкШнЁЃ
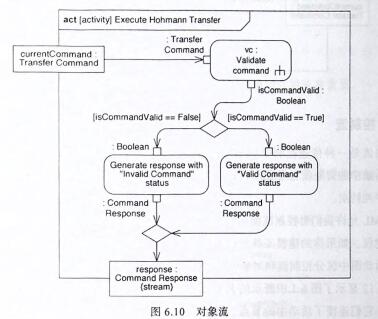
ЭМ6.10ЯдЪОСЫжЎЧАдкЭМ6.1жаЯдЪОЕФДѓаЭЛюЖЏЭМЕФНкбЁВПЗжЁЃетИіВПЗжЯдЪОСЫЦп ИіЖдЯѓСїЕФЪОР§ЁЃЫќУЧБэЪОетИіЛюЖЏВПЗжжаЕФЖЏзїашвЊЖдЯѓзїЮЊЪфШЫЃЌВЂЧвЛсВњГіЖд
ЯѓзїЮЊЪфГіЁЃ
 ЁЁ ЁЁ
ФуБиаыШЗБЃЖдЯѓСїСНЖЫЕФЖдЯѓНкЕугЕгаМцШнЕФРраЭЃЌдкЮВЖЫзїЮЊЪфГіВњЩњЕФЖдЯѓ СюХЦБиаыПЩвдзїЮЊМ§ЭЗЖЫЕФЪфШЫБЛНгЪмЁЃФуПЩвдвдЯТУцСНжжЗНЪНжЎвЛРДТњзуетжждМЪјЃК
ЁѕРраЭПЩвдЪЧЯрЭЌЕФ(ШчЭМ6.10ЫљЪО)
ЁѕЩЯгЮЕФРраЭПЩвдЪЧЯТгЮРраЭЕФзгРраЭ(ШчЭМ6.11ЫљЪО)
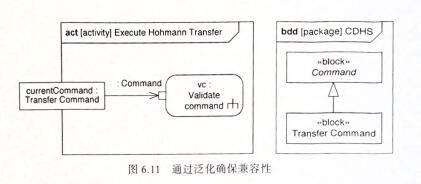
ЭМ6.11жаЕФЛюЖЏЭМЦЌЖЮЯдЪОСЫЭМ6.10жаЯдЪОЕФааЮЊЕФБфжжЁЃTransfer Command
ЪЧCommandЕФзгРраЭ(е§ШчЫќУЧжЎМфЕФЗКЛЏЙиЯЕЫљДЋДяЕФЃЌФЧжжЙиЯЕЯдЪОдкBDD жа)ЁЃЖјЗКЛЏЙиЯЕБэЪОгаПЩжУЛЛад(втЮЖзХдкашвЊГЌРрЕФЕиЗНЃЌзгРрЖМЛсБЛНгЪм)ЁЃ
ЖЏзїvcашвЊCommandРраЭЕФЪфШыЁЃвђДЫЫќЛсНгЪмЫќЫљгаЕФзгРраЭЃЌАќРЈTransfer CommandЕФЪЕР§ЁЃ
 ЁЁ ЁЁ
етЪЧеыЖдГщЯѓЩшМЦЕФР§зг(Р§ШчЃКCommand)ЁЃФугІИУЖдетжжЪЕМљИаОѕСМКУЃЌЫќ дкФуЕФЯЕЭГЩшМЦжаДДНЈСЫПЩРЉеЙадЃЌЖдгкЩњУќжмЦкжаЩдКѓВЛПЩБмУтЕФБфИќРДЫЕЃЌФЧЛс
аЁЛЏГЩБОЁЃ
7.2ПижЦСї
ПижЦСїЪЧвЛжжДЋЕнПижЦСюХЦЕФБпЁЃПижЦСюХЦЕФЕНДяПЩвд)ЃЌЁЎиЖЏЕШД§ЫќЕФЖЏзїЁЃвђ ДЫЃЌЕБЛюЖЏжаЕФЖдЯѓСїздЩэЮоЗЈДЋДяађСаЕФЪБКђ.ФуЛсЪЙгУПижЦСїРДБэЪОвЛЯЕСаЖЏзї
жЎМфЕФађСадМЪјЁЃ
SysMLдЪаэЮвУЧЖдПижЦСїЪЙгУСНжжБъЪЖЗЈЃКДјгаМ§ЭЗЕФащЯп.ЛђепДјгаМ§ЭЗЕФЪЕ ЯпЁЃЮвНЈвщЃЌШчЙћФуЕФНЈФЃЙЄОпжЇГжащЯпЕФБъЪЖЗЈЃЌФЧУДОЭЪЙгУЫќЃКФЧбљЃЌПДЭМепКм
ШнвздкЛюЖЏЭМжаЧјЗжПижЦСїКЭЖдЯѓСїЁЃ
ЭМ6.12ЯдЪОСЫЭМ6.1жаЫљЪОЕФДѓаЭЛюЖЏЭМЕФвЛВПЗжЁЃетИіВПЗжЯдЪОСЫ 7ИіПижЦСї ЕФЪОР§ЃЌЫќУЧСЌНгСЫЛюЖЏжаЕФНкЕуЃЌвдЖЈвхЫќУЧжЎМфХХађЕФађСаЃКФЧаЉНкЕужаЃЌгаЫФ
ИіЪЧЖЏзїЃКСНИіЕїгУааЮЊЖЏзїЁЂвЛИіЕШД§ЪБМфЖЏзївдМАвЛИіНгЪмЪТМўЖЏзї(6.8НкЛс ЯъЯИЬжТлЬиЖЈЕФЖЏзїРраЭ)ЁЃЕБвЛИіЖЏзїЭъГЩЪБЃЌЫќОЭЛсдкЪфГіЕФПижЦСїжаЬсЙЉПижЦ
СюХЦЃЌФЧЛсЦєЖЏађСажаЕФЯТвЛИіЖЏзїЁЃ
 ЁЁ ЁЁ
8ЁЂдйДЮВћЪіЖЏзї
МШШЛФувбОбОНтСЫЖдЯѓНкЕуКЭБпЃЌШУЮвУЧПДЯТЃЌЙигкЖЏзїФуЛЙашвЊжЊЕРФФаЉФк ШнЁЃШУЮвУЧПДЯТЖЏзїЪВУДЪБКђПЊЪМЃЌВЂЬжТлЫФжжЬиБ№РраЭЕФЖЏзїЃКЕїгУааЮЊЖЏзїЁЂЗЂ
ЫЭаХКХЖЏзїЁЂНгЪмМўЖЏзївдМАЕШД§ЪБМфЖЏзїЁЃ
8.1ЖЏзїКЮЪБПЊЪМ
ЮЊСЫе§ШЗЕиНтЪЭВЂДДНЈЛюЖЏЭМЃЌжЊЕРЖЏзїЪВУДЪБКђЛсПЊЪМЗЧГЃживЊЁЃвЛИіЖЏзїЯы вЊЦєЖЏ.ашвЊТњзувЛИіЬѕМўЁЃ
ЁѕгЕмоЖЏзїЕФЛюЖЏе§дкжДааЁЃ
ЁѕдкЫљгЪфШЫЕФПижЦСїЩЯЖМгаПижЦСюХЦЕНДяЁЃ
ЁѕдкЫљгаЪфШыЕФЖдЯѓСїЩЯЖМгазуЙЛЪ§СПЕФЖдЯѓСюХЦЕНДяЃЌвдТњзуЯргІЪфШЫЫЈЕФ ЕЭЖржиадЁЃ
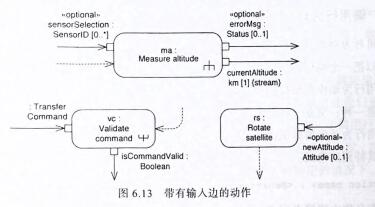
ШУЮвУЧдкМИИіЪОР§ЖЏзїЕФЧщОГжаПДПДетаЉЙцдђЃЌШчЭМ6.13ЫљЪОЁЃ
 ЁЁ ЁЁ
ЖЏзїm aгЕгавЛИіЪфШЫЕФПижЦСїКЭвЛИіЪфШЫЕФЖдЯѓСїЁЃЖдЯѓСїИНзХдкЪфШЫЫЈ sensorSelectionЩЯЃЌЫќЕФЕЭЖржиадЪЧСуЁЃвђДЫетИіЖЏзїдкЪфШЫЕФПижЦСїЩЯгаПижЦСю
ХЦЕФЪБКђОЭЦєЖЏЃЌВЛЙмдкЫЈsensorSelectionЩЯЪЧЗёгаЖдЯѓСюХЦЁЃ
ЖЏзїvcгЕгавЛИіЪфШЫЕФПижЦСїКЭвЛИіЪфШЫЕФЖдЯѓСїЁЃЖдЯѓСїИНзХдквЛИіЪфШыЫЈ ЩЯЃЌЖјЫќашвЊTransfer
CommandРраЭЕФЖдЯѓСюХЦЁЃдкетИіЫЈЩЯУЛгаЯдВЛШЮКЮЖржиадЁЃ вђДЫЫќЕФЖржиадЪЧФЌШЯЕФ1..1ЁЃетвтЮЖзХЃЌЕБвЛИіПижЦСюХЦКЭвЛИіЖдЯѓСюХЦЗжБ№ЕНДя
ЯргІЕФЪфШЫБпЪБЃЌетИіЖЏзїОЭЛсЦєЖЏЁЃетаЉСюХЦВЛашвЊ(вВВЛЬЋПЩФм)ЭЌЪБЕНДяЁЃШЛЖјЃЌЯывЊШУЖЏзїЦєЖЏЃЌСНИіСюХЦЖМБиаыГіЯждкЪфШЫБпЩЯЁЃ
ЖЏзїrsгЕгавЛИіЪфШЫЕФЖдЯѓСїЃЌЫќИНзХдкЪфШЫЫЈnewAttitudeЩЯЁЃетИіЪфШыЫЈЪЧ ПЩбЁЕФЃЌЫќЕФаЁЖржиадЪЧСуЁЃетИіЖЏзїВЛашвЊШЮКЮСюХЦ(ШЮКЮРраЭ)ОЭФмЦєЖЏЁЃдк
етжжЧщПіЯТЃЌжЛвЊТњзуШ§жжЬѕМўжаЕФЕквЛИі;жЛвЊгЕгаЫќЕФЛюЖЏПЊЪМжДааЃЌетИіЖЏзї ОЭЛсЦєЖЏЁЃ
НЈФЃепдкЛцжЦЛюЖЏЭМЕФЪБКђЃЌГЃМћЕФДэЮѓЪЧЯђвЛИіЖЏзїЛцжЦЖрИіЪфШЫБпЃЌвдБэ ДяЭЈЯђФЧИіЖЏзїЕФВЛЭЌТЗОЖЁЃЫћУЧДэЮѓЕиЯраХЖрЬѕЪфШЫБпжЎМфЮЊЁАЛђЁБдЫЫуЁЃе§ШчФу
'ЯждкЫљжЊЕРЕФЃЌетЦфЪЕЪЧЁАгыЁБдЫЫуЁЃЫљвдЧызЂвтдкФуЯђМКЕФЛюЖЏЭМжаВщеветбљЕФДэ Юѓ;етЪЧКмШнвзЗИЕФДэЮѓЁЃШчЙћФуашвЊЖдЭЈЯђЬиЖЈЖЏзїЕФПЩбЁТЗОЖНЈФЃЃЌОЭБиаыдкЛю
ЖЏжЎЧАВхШЫвЛИіКЯВЂНкЕу(ИќЖрФкШнЛсдк6.9.4НкжаЬжТл)ЁЃ
ФуЛЙвЊжЊЕРЃЌЖЏзїПЩвдВЛашвЊШЮКЮЪфШЫБпЁЃдкФЧжжЧщПіЯТЃЌФуБэДяЕФЪЧЖЏзїВЛЛс ЕШД§ШЮКЮЪфШЫСюХЦ;ЫќЛсдкЛюЖЏЦєЖЏЕФЪБКђЦєЖЏЁЃШчЙћдкЛюЖЏжагаЖрИіУЛгаШЮКЮЪфШы
БпЕФЖЏзїЃЌФЧУДОЭЛсЭЌЪБЦєЖЏЁЃ
8.2ЕїгУааЮЊЖЏзї
ЕїгУааЮЊЖЏзїЪЧвЛжжЬиЖЈЕФЖЏзїЃЌЫќЛсдкЦєгУЕФЪБКђДЅЗЂСэвЛжжааЮЊЁЃЕїгУааЮЊ ЖЏзїПЩвдАбвЛИіИпВуДЮЕФааЮЊЗжНтГЩвЛЯЕСаЕЭВуДЮЕФааЮЊЁЃ
ЕїгУааЮЊЖЏзїЛсИљОнИеИеЬжТлЕФЯрЭЌЙцдђЦєЖЏЁЃЫќЫљЕїгУЕФааЮЊПЩвдЪЧвдЯТШ§жж жаЕФШЮвтвЛжжЃКНЛЛЅЁЂзДЬЌЛњЛђепЦфЫћЛюЖЏЁЃ
ЕїгУааЮЊЖЏзїЕФБъЪЖЗЈКЭЖЏзїЕФБъЪЖЗЈЯрЭЌЁЊЁЊдВНЧОиаЮЁЊЁЊжЛЪЧЦфжаЕФУћГЦзж ЗћДЎгаЦфЬиБ№ЕФИёЪНЃК
 ЁЁ ЁЁ
ЖЏзїУћГЦгЩНЈФЃепЖЈвхЁЃааЮЊУћГЦБиаыКЭФудкФЃаЭВуМЖЙиЯЕжаФГДІЖЈвхЕФНЛЛЅЁЂ зДЬЌЛњЛђепЛюЖЏЕФУћГЦЦЅХфЁЃ
ЭМ6.13жаЫљЪОЕФШ§жжЖЏзїЖМЪЧЕїгУааЮЊЖЏзїЁЃФуЛсЗЂЯжMeasure altitudeЁЂ Validate
CommandвдМАRotate satelliteЪЧдкЯЕЭГФЃаЭжаЖЈвхЕФШ§жжааЮЊЕФУћГЦЃЌЫљвд ФуПЩвдзіГіЩЯЪіНсТлЁЃЕїгУааЮЊЖЏзї(ЯёmaКЭvc)ЕФгвЯТНЧГіЯжЗжжЇЗћКХЃЌБэЪОБЛ
ЕїгУЕФааЮЊ(Measure altitudeЁЂValidate Command)ЪЧвЛжжЛюЖЏЁЃУЛгаФЧжжЗћКХЕФЕї
гУааЮЊЖЏзї(Яёrs)ЪЧФЃК§ЕФ;БЛЕїгУЕФааЮЊ(Rotate satellite)ПЩФмЪЧвЛжжНЛЛЅЃЌвВ ПЩФмЪЧвЛжжзДЬЌЛњЁЃОЁЙметУДЫЕЃЌЕЋЪЧНЈФЃепКмЩйЪЙгУЕїгУааЮЊЖЏзїРДДЅЗЂзДЬЌЛњЁЃ
ЭМ6.14ЯдЪОСЫУћЮЊopen telemetry streamЕФЕїгУааЮЊЖЏзїР§згЃЌЫќЛсДЅЗЂааЮЊ
Stream telemetry dataЁЃЗжжЇЗћКХБэЪОStream telemetry dataЪЧвЛжжЛюЖЏЁЃетжжЕїгУаа
ЮЊЖЏзїгавЛИіУћЮЊframeЕФЪфГіЫЈЃЌГжгаРраЭЮЊTransfer FrameЕФЖдЯѓСюХЦЁЃвђЮЊет ИіЫЈЪЧвЛжжСїЫЈ(streaming
pin)ЃЌвђДЫЖдЯѓСюХЦПЩвдДгЕїгУЕФЛюЖЏжаГіЯжЃЌВЂЮЊетИіЫЈЫљгУ Иј1ЁЂгЮЖЏзїЯћЗб МДБуЪЧдкStream
telemetry dataе§дкжДааЕФЪБКђЁЃвђДЫЃЌетИіЖЏзїПЩвддквЛДЮжДааЕФЙ§ГЬжаВњЩњЖрИіРраЭЮЊTransfer
FrameЕФЖдЯѓСюХЦЁЃ
 ЁЁ ЁЁ
ЕБЕїгУааЮЊЖЏзїДЅЗЂСэвЛИіЛюЖЏЕФЪБКђЃЌЕїгУааЮЊЖЏзїЕФЫЈБиаыгыЫљЕїгУЛюЖЏЕФЛюЖЏВЮЪ§ЦЅХфЁЃЭМ6.15ЯдЪОСЫ
Stream telemetry dataЛюЖЏЕФЖЈвхЃЌЫќгЕгавЛИіЪфГіЕФЛюЖЏВЮЪ§ЃЌгыЭМ6.14жаЯдЪОЕФЪфГіЫЈЯрЦЅХфЁЃвЛЕЉетИіЛюЖЏБЛДЅЗЂЃЌЫќОЭЛсГжајЕиАбРраЭЮЊSource
PacketЕФЖдЯѓСюХЦДгЖрИіЪ§ОндДзЊЛЛЕНРраЭЮЊTransfer FrameЕФЕЅИіЖдЯѓСюХЦСїжаЁЃЕБУПИіЖдЯѓСюХЦЕНДяЪфГіЛюЖЏВЮЪ§frameЕФЪБКђЃЌОЭЛсТэЩЯБЛДЋЕнЕНЕїгУааЮЊЖЏзїopen
telemetry streamЯргІЕФЪфГіЫЈЩЯЁЃ
ФуПЩвдЪЙгУЕїгУааЮЊЖЏзїНјаажиЙЙЃЌАбГіЯждкЖрИіЕиЗНЕФЭЈгУЙІФмПщГщШЁГіРДЃЌдкЕЅЖРЕФааЮЊжаЖЈвхЫќЃЌШЛКѓФужЛашвЊЖрДЮЕїгУЫќЁЃетжжЩшМЦЪЕМљЛсШУЮвУЧИќвзгкжигУФЧаЉЭЈгУЕФЕЭВуДЮааЮЊЁЃР§ШчЃЌStream
telemetry dataЛюЖЏАќКЌШ§ИіЕїгУааЮЊЖЏзїЃЌЫќУЧЖМЛсДЅЗЂCreate virtual channel
frameааЮЊЁЃФЧИіааЮЊжЛЖЈвхСЫвЛДЮ(дкФЃаЭВуМЖЙиЯЕжаЕФФГДІЖЈвхЮЊЛюЖЏ)ЃЌЖјдкетРяжДааСЫЖрДЮЁЃ(дкетжжЬиЖЈЕФЧщПіЯТЃЌФЧШ§ДЮЕЅЖРЕФжДааВЂааЗЂЩњЁЃ)
8.3ЗЂЫЭаХКХЖЏзї
ЮЊСЫТњзуПЩЩьЫѕадКЭадФмЕФвЊЧѓЃЌЯЕЭГЙЄГЬЪІОГЃЛсЩшМЦЗжВМЪНКЭВЂЗЂЕФЯЕЭГЁЃ
етбљЕФЯЕЭГЛсЪЙгУВЂЗЂЛњжЦРДДЋЕнЪТМўЁЂФмСПКЭЪ§ОнЃЌВЂЭЌВНФЧаЉвдВЂааЕФЗНЪНВйзїЕФИїжжЖЏзїЁЃФуПЩвдЪЙгУЗЂЫЭаХКХЖЏзїКЭНгЪмЪТМўЖЏзїЃЌдкЛюЖЏЭМЩЯЮЊетжжРраЭЕФЯЕЭГааЮЊНЈФЃЁЃ
ЗЂЫЭаХКХЛюЖЏЪЧвЛжжЬиЖЈРраЭЕФЖЏзїЃЌЦєгУЕФЪБКђЛсвьВНЕиЩњГЩаХКХЪЕР§ЃЌВЂАбЫќЗЂЫЭЕНФПЕФЕиЁЃЗЂЫЭаХКХЖЏзїЛсИљОн6.8.1НкжаЬжТлЕФЭЌбљЙцдђЦєЖЏЁЃ
 ЁЁ ЁЁ
ЗЂЫЭаХКХЖЏзїЕФБъЪЖЗЈЪЧаЮзДРрЫЦгкТЗБъЕФЮхБпаЮ(ШчЭМ6.16ЛюЖЏЭМжаЯТАыВПЗж ЫљЪОдкЗЂЫЭаХКХЖЏзї(Р§ШчЃК
Orbit Radius Updated)ФкВПЯдЪОЕФзжЗћДЎБиаыгыдк ФЃаЭВуМЖЙиЯЕФГДІЖЈвхЕФаХКХЕФУћГЦЯрЦЅХфЁЃ
ШУЮвУЧЛиЙЫвЛЯТЕк3еТжаЕФФкШнЃЌЦфжаЬсЕНаХКХЪЧвЛжжФЃаЭдЊЫиЁЃКЭФЃПщвЛ бљЃЌаХКХПЩвдгЕгаЪєадЁЃФЧаЉЪєадвЛАуЛсДњБэаХКХЪЕР§ДгЗЂЫЭЗНЕНФПБъЗНДЋЕнЕФЪ§
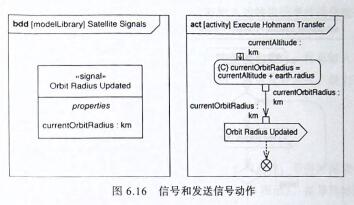
ОнЁЃЭМ6.16жаЕФBDDЯдЪОСЫ Orbit Radius UpdatedаХКХЁЃетИіаХКХгЕгавЛИіЪєадЃК
currentOrbitRadius,ЫќЕФРраЭЪЧkmЁЃвђДЫетИіаХКХЕФЪЕР§ПЩвдаЏДјДгЗЂЫЭЗНЕНФПБъ ЗНЕФвЛИіkmжЕЁЃ
 ЁЁ ЁЁ
ЭМ6.16жаЕФЛюЖЏЭМЯдЪОСЫЭМ6.1жаЫљЪОЕФExecute Hohmann TransferЛюЖЏ
ЕФвЛВПЗжЃЌетВПЗжжиЕудкгкЗЂЫЭаХКХЖЏзїЁЃЕБетИіЗЂЫЭаХКХЖЏзїЦєЖЏЕФЪБКђвЛ вВОЭЪЧдкЪфШЫЫЈжагаЪфШЫЕФЖдЯѓСюХЦЕНДяЪБЁЊЁЊЫќОЭЛсвьВНЕиЩњГЩOrbit
Radius UpdatedаХКХЕФЪЕР§ЃЌАбcurrentOrbitRadiusжЕДЋЫЭИјЕШД§ЫќЕФФПБъЗНЁЃвђЮЊЗЂЫЭ
аХКХЖЏзїЪЧвьВНЕФЃЌЫљвдВЛЛсЕШД§РДздФПБъЗНЕФЛигІ;ЫќЛсСЂМДЭъГЩЃЌВЂдкЪфГі БпЬсЙЉвЛИіПижЦСюХЦЁЃУПЕБаТЕФЖдЯѓСюХЦЕНДяЦфЪфШыЫЈЕФЪБКђЃЌЗЂЫЭаХКХЖЏзїЖМ
ЛсЦєЖЏЁЃ
8.4НгЪмЪТМўЖЏзї
НгЪмЪТМўЖЏзїдквьВНааЮЊжаЪЧЗЂЫЭаХКХЖЏзїЕФКУДюЕЕ;НгЪмЪТМўЖЏзїЪЧдкЛюЖЏжа ЪЙгУЕФдЊЫиЃЌЫќБэЪОЛюЖЏдкМЬајжДаажЎЧАЃЌБиаыЕШД§ЗЂЩњвЛИівьВНЕФЪТМўЁЃвЛАуЧщПі
ЯТЃЌетИівьВНЪТМўЪЧНгЪеаХКХЪЕР§ЁЃ
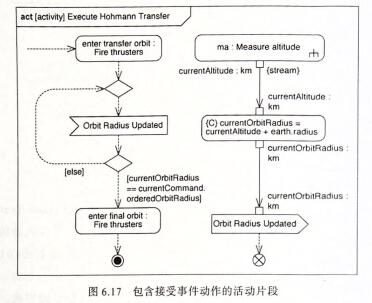
НгЪмЪТМўЖЏзїЕФБъЪЖЗЈЪЧвЛИіЮхБпаЮЃЌПДЦ№РДЯёЪЧвЛИіОиаЮЕФвЛБпгавЛИіШ§НЧаЮ ЕФВл(ШчЭМ6.17жаЛюЖЏЭМЕФзѓжаВПЫљЪО)ЁЃЯдЪОдкНгЪмЪТМўЖЏзїжаЕФзжЗћДЎ(Р§ШчЃК
Orbit Radius Updated)ЭЈГЃЛсгыФудкФЃаЭВуМЖЙиЯЕФГДІЖЈвхЕФаХКХУћГЦЯрЦЅХфЃЌБэЪО НгЪмЪТМўЖЏзїЛсЕШД§ФЧИіаХКХЕФЪЕР§ЃЌЖјИУЪЕР§ЛсвьВНЕНДяЁЃЫќЕНДяЃЌНгЪмЪТМўЖЏзї
ОЭЛсЭъГЩЃЌПижЦСїЛсЧАНјЕНЛюЖЏжаЕФЯТвЛИіНкЕуЁЃ
 ЁЁ ЁЁ
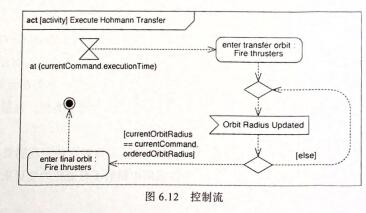
ЭМ6.17ЯдЪОСЫЭМ6.1жаЫљЪОЕФExecute Hohmann TransferЛюЖЏЕФвЛВПЗжЁЃетИіВП
ЗжЙизЂЗЂЩњдкСНИіВЂааПижЦСїжЎМфЃЌЙсДЉИУЛюЖЏЕФвьВНЭЈаХЁЃВЂЗЂЕФСїЛсЗжБ№ЖРздНј ааЃЌЕЋгаЪБЫќУЧдкааЮЊЕФЬиЖЈЪБМфЕуБиаыЪЧвьВНЕФЁЃ
дкетИіР§згжаЃЌЕБПижЦСюХЦЕНДяНгЪмЪТМўЖЏзїЕФЪфШЫПижЦСїЪБЃЌЫќОЭЛсЦєЖЏЃЌЖј ФЧЪЧдкenter transfer
orbitЖЏзїЭъГЩжЎКѓВХЛсЗЂЩњЕФЪТЧщЁЃШчЙћгвВрЕФЗЂЫЭаХКХЖЏзї вбОЩњГЩСЫвЛИіOrbit Radius
UpdatedаХКХЪЕР§ЃЌФЧУДНгЪмЪТМўЖЏзїЛсСЂМДЭъГЩЃЌВЂ дкЫќЕФЪфГіПижЦСїжаЬсЙЉПижЦСюХЦЃЌШЛКѓжДааЛсНјааЕНЯТвЛИіНкЕуЁЃ
СэвЛЗНУцЃЌШчЙћгвВрЕФЗЂЫЭаХКХЖЏзїВЂУЛгаЩњГЩOrbit Radius UpdatedаХКХЪЕ Р§ЃЌФЧУДНгЪмЪТМўЖЏзїОЭЛсЕШД§Orbit
Radius UpdatedаХКХЪЕР§;Execute Hohmann TransferЖЏзїдкИУаХКХЪЕР§ЩњГЩжЎЧАЖМЮоЗЈНјааЕНenter
final orbitЖЏзїЁЃ
КЭЦфЫћРраЭЕФЖЏзївЛбљЃЌНгЪмЪТМўЖЏзїВЂВЛашвЊШЮКЮЪфШыБпЁЃЖј6.8.1НкжаЕФЙц дђЩљУїЃЌЖдгкУЛгаЪфШЫБпЕФЖЏзїРДЫЕЃЌжЛвЊЛюЖЏПЊЪМжДааЃЌЫќОЭЛсЦєЖЏЁЃдкетЗНУцНг
ЪмЪТМўЖЏзївВВЛР§ЭтЃЌжЛвЊЛюЖЏПЊЪМжДааЃЌУЛгаЪфШЫБпЕФНгЪмЪТМўЖЏзїОЭЛсЦєЖЏЃЌВЂ ПЊЪММрЬ§аХКХЪЕР§ЁЃ
ШЛЖјЃЌетРягавЛЕуЧјБ№ЃКМДБудкЕквЛИіаХКХЪЕР§ЕНДяжЎКѓЃЌУЛгаЪфШЫБпЕФНгЪмЪТ МўЖЏзївВЛсБЃГжгааЇЃЌЫќЛсМЬајМрЬ§ЦфЫћаХКХЪЕР§ЁЃЭЈЙ§етжжЗНЪНЃЌЮвУЧПЩвдЮЊГжај
ЯьгІвьВНЪТМўЕФЯЕЭГааЮЊНЈФЃЁЃ
8.5ЕШД§ЪБМфЖЏзї
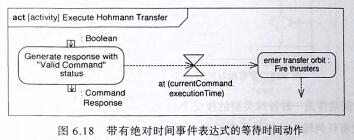
ЕШД§ЪБМфЪТМўЗЂЩњЕФНгЪмЪТМўЖЏзївВНазіЕШД§ЪБМфЖЏзїЁЃЕШД§ЪБМфЖЏзїЕФБъЪЖЗЈ ЪЧвЛИіЩГТЉаЮзДЕФЗћКХЃЌЯТУцгаЪБМфБэДяЪН(ШчЭМ6.18ЫљЪО)ЁЃдкЕШД§ЪБМфЖЏзїКЭЦф
ЫћНгЪмЪТМўЖЏзїжЎМфЃЌЧјБ№НідкгкБъЪЖЗЈКЭЪТМўЕФРраЭВЛЭЌ;дкЩЯвЛНкжаа№ЪіЕФЦфЫћ вЛЧаЖМЖдЕШД§ЪБМфЖЏзїЪЪгУЁЃ
 ЁЁ ЁЁ
ЩГТЉЯТУцЕФЪБМфБэДяЪНПЩвджИЖЈОјЖдЪБМфЪТМўЃЌвВПЩвджИЖЈЯрЖдЪБМфЪТМўЁЃОј ЖдЪБМфЪТМўБэДяЪНвдЙиМќзжatПЊЪМЁЊЁЊР§ШчЃКat
( 1430 GMT)Лђat ( 14 NOV 2106, 1200 CST)Лђat ( transferStartTime)ЁЃЯрЖдЪБМфЪТМўБэДяЪНвдЙиМќзжafterПЊЪМЃЌ
Р§ШчЃКafter ( 30 days)Лђ aftw ( 50ms)Лђ after (timerCount)ЁЃ
ЭМ6.18жаЯдЪОЕФЛюЖЏЦЌЖЮЪЧЭМ6.1жаЯдЪОЕФExecute Hohmann TransferЛюЖЏЕФ
вЛВПЗжЁЃетИіВПЗжзЈзЂгкЛюЖЏжаЕФЕШД§ЪБМфЖЏзїЃЌЫќЛсЕШД§вЛИіОјЖдЪБМфЪТМўвьВНЗЂ ЩњЁЃЪБМфЪТМўЕФЬиЖЈжЕЛсЗХжУдкexecutionTimeжЕЪєаджаЁЃдкЪБМфБэДяЪНжаЪЙгУЕуБъ
ЪЖЗЈБэЪОexecutionTimeжЕЪєадЧЖШЫдкcurrentCommandЖдЯѓжаЁЃ
ЕБПижЦСюХЦЕНДяетИіЕШД§ЪБМфЖЏзїЕФЪфШЫПижЦСї(ЩЯгЮЖЏзїЭъГЩЃЌЩњГЩСЫгааЇЕФ УќСюЯьгІ)ЃЌЫќОЭЛсЦєЖЏЁЃШчЙћОјЖдЪБМфЪТМў(гЩexecutionTimeжИЖЈ)вбОЗЂЩњЃЌФЧ
УДЕШД§ЪБМфЖЏзїОЭЛсСЂПЬЭъГЩЃЌВЂдкЦфЪфГіПижЦСїжаЬсЙЉПижЦСюХЦЁЃетбљжДааЙ§ГЬОЭ ЛсЧАНјЕНЯТвЛИіНкЕуЁЃШчЙћexecutionTimeЛЙУЛгаГіЯжЃЌФЧУДЕШД§ЪБМфЖЏзїОЭЛсЕШД§ЪБМфЪТМўЕФЗЂЩњЁЃExecute
Hohmann TransferЛюЖЏдкФЧИіЪБПЬЗЂЩњжЎЧАЃЌЖМЮоЗЈЧАНј ЕН enter transfer
orbit ЖЏзїЁЃ
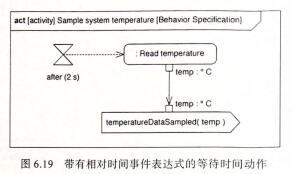
ШчЙћЕШД§ЪБМфЖЏзїгЕгаЯрЖдЪБМфЪТМўБэДяЪН(ШчЭМ6.19ЫљЪО)ФЧУДвЛЕЉЕШД§ЪБМф ЖЏзїЦєЖЏЃЌЪБМфЪТМўЕФЪБжгОЭЛсПЊЪММЦЪБЁЃвђЮЊетРяЯдЪОЕФЕШД§ЪБМфЖЏзїУЛгаШЮКЮЪф
ШЫБпЃЌЫљвддкSample system temperatureПЊЪМжДааЕФЪБКђЃЌЫќОЭЛсЦєЖЏЁЃСНУыжЎКѓЃЌ
ЯрЖдЪБМфЪТМўЗЂЩњЃЌЕШД§ЪБМфЖЏзїЛсдкЦфЪфГіПижЦСїжаЬсЙЉПижЦСюХЦЃЌЦєЖЏЯТгЮЕФЕї гУааЮЊЖЏзїЃЌЖјЫќЛсЕїгУRead
temperatureааЮЊЁЃ
 ЁЁ ЁЁ
ЕШД§ЪБМфЖЏзїЪЧвЛжжЬиЪтРраЭЕФНгЪмЪТМўЖЏзїЁЃМДБудкЫљашвЊЕФЪТМўЕквЛДЮЗЂЩњ жЎКѓЃЌвВУЛгаШЮКЮЪфШЫБпЕФНгЪмЪТМўЖЏзїЛЙЛсБЃГжгааЇЁЃвђДЫЃЌдкЭМ6.19жаЯдЪОЕФ
ЕШД§ЪБМфЖЏзїЛсМЬајУПСНУыЪфГівЛИіПижЦСюХЦ(ВЂДЅЗЂRead temperatureааЮЊ)ЃЌжБЕН Sample
system temperatureЛюЖЏжежЙЁЃетИіР§згЫЕУїСЫШчКЮЮЊГжајЕФжмЦкадааЮЊНЈФЃЁЃ
9ЁЂПижЦНкЕу
БОеТвбОЬжТлСЫФмЙЛдкЛюЖЏжаДцдкЕФСНжжРраЭНкЕуЃКЖЏзїНкЕуКЭЖдЯѓНкЕуЁЃЯждк ШУЮвУЧПДЯТКѓвЛжжНкЕуЃКПижЦНкЕуЁЃЪЙгУПижЦНкЕуЃЌПЩвдв§ЕМЛюЖЏбизХТЗОЖжДаа,
ЖјВЛжЛЪЧМђЕЅЕФађСаЖЏзїЁЃПижЦНкЕуМШПЩвджИв§ЛюЖЏжаПижЦСюХЦЕФСїЃЌвВПЩвджИв§Лю ЖЏжаЖдЯѓСюХЦЕФСїЁЃ
ПижЦНкЕуга7жжРраЭЃКГѕЪМНкЕуЁЂЛюЖЏжеНкЕуЁЂСїжеНкЕуЁЂОіЖЈНкЕуЁЂКЯВЂ НкЕуЁЂЗжжЇНкЕуКЭМЏКЯНкЕуЁЃЕБШЛЃЌПЩвдЪЙгУетаЉНкЕуЕФзщКЯЃЌдкЛюЖЏжаЖЈвхШЮвтИД
дгЕФПижЦТпМЃЌвдТњзуЯЕЭГЙІФмашЧѓЁЃ
ШУЮвУЧРДПДЯТУПжжНкЕуЪЧШчКЮЙЄзїЕФЁЃ
9.1ГѕЪМНкЕу
ГѕЪМНкЕуБъМЧЛюЖЏЕФЦ№ЕуЁЃе§ЪНЕФЫЕЗЈЪЧЃЌЫќБъМЧСЫЛюЖЏжаЕФвЛИіЮЛжУЃЌПижЦСюХЦ ЕФСїЛсДгФЧРяПЊЪМЁЃГѕЪМНкЕуЕФБъЪЖЗЈЪЧjаЁЕФЪЕаФдВаЮЃЌЫќвЛАужЛгавЛИіЪфГіПижЦСїЁЃ
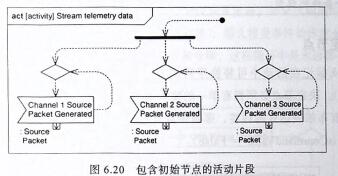
ЭМ6.20жаЯдЪОЕФЛюЖЏЦЌЖЮЪЧжЎЧАдкЭМ6.15жаЯдЪОЕФЛюЖЏStream telemetry data
ЕФвЛВПЗжЁЃетИіЦЌЖЮЙизЂШ§ИіВЂЗЂЕФЛюЖЏађСаЕФЦєЖЏЃЌЫќУЧЖМДгЭМЖЅВПЕФГѕЪМНкЕуПЊ ЪМЁЃЕБStream telemetry
dataЛюЖЏПЊЪМЕФЪБКђЃЌЛсдкетИіГѕЪМНкЕуЩЯЗХжУвЛИіПижЦСю ХЦЁЃЫќЛсТэЩЯАбЪфГіПижЦСїзЊЛЛЮЊЗжжЇНкЕуЃЌШЛКѓЛюЖЏЛсМЬајжДааЁЃ(6.9.5НкЛсЯъЯИ
ЬжТлЗжжЇНкЕуЁЃ)
 ЁЁ ЁЁ
вВПЩФмЖдЯѓСюХЦСїБОЩэОЭзувддкЛюЖЏжаЖЈвхе§ШЗЕФЖЏзїађСаЁЃЖдЯѓСюХЦвЛАуЛсДгЪфШЫ ЕФЛюЖЏВЮЪ§(дкЛюЖЏЭМЕФЭтПђЩЯ)ПЊЪМЁЃдкетбљЕФЧщПіЯТЃЌФуВЛашвЊдкЛюЖЏжагаГѕЪМНкЕуЁЃ
9.2СїжеНкЕуКЭЛюЖЏжеНкЕу
СїжеНкЕуКЭЛюЖЏжеНкЕуЪЧБъМЧПижЦСюХЦСїНсЪјЕФПижЦНкЕуЁЃШЛЖјЃЌЖўепжЎМф гаУїЯдЕФЧјБ№ЃКЕБПижЦСюХЦЕНДяСїжеНкЕуЕФЪБКђЃЌФЧИіСюХЦЛсБЛЯњЛйЃЌвдДЫБъМЧЕЅ
ЖРвЛИіПижЦСїЕФНсЪјЁЃЖјЕБПижЦСюХЦЕНДяЛюЖЏжеНкЕуЕФЪБКђЃЌећИіЛюЖЏЖМЛсНсЪјЃЌ вдДЫБъМЧЫљгаПижЦСїЕФНсЪј(ВЛЙмЫќУЧЕБЧАЪЧЗёЛЙдкжДаажа)ЁЃ
СїжеНкЕуЕФБъЪЖЗЈЪЧАќКЌXЕФдВаЮЁЃЛюЖЏжеНкЕуЕФБъЪЖЗЈЪЧАќКЌаЁЕФЪЕаФдВ аЮЕФдВаЮЁЃ(жЎЧАеЙЯжЕФ)ЭМ6.17ЯдЪОСЫетСНжжНкЕуЕФР§згЁЃ
ЭМ6.17жаЯдЪОЕФСНИіЖЏзїађСаЛсВЂаажДааЁЃЕїгУааЮЊЖЏзїmaЛсдкЦфЪфГіЫЈЩЯвдСїЕФаЮЪНГжајЪфГіЖдЯѓСюХЦЃЌmaЯТгЮЕФСНИіЖЏзїПЩФмЛсвђДЫжДааЖрДЮЁЃУПДЮЗЂЫЭаХ
КХЖЏзїЭъГЩЕФЪБКђЃЌОЭЛсГіЯжвЛИіПижЦСюХЦЃЌЕНДяСїжеНкЕуЃЌВЂБЛЯњЛйЁЃЛюЖЏжа ЦфЫћСюХЦЖМВЛЛсЪмЕНгАЯьЁЃExecute
Hohmann TransferЛюЖЏЛсМЬајЃЌжБЕНenter final orbitЖЏзїЭъГЩЃЌВЂЪфГівЛИіПижЦСюХЦЃЌЫќЛсЕНДяЛюЖЏжеНкЕуЁЃФЧЪБЃЌећИіЛюЖЏЖМ
ЛсжежЙ(МДБуЛюЖЏmaЛЙдкЪфГіЖдЯѓСюХЦ)ЁЃ
9.3ОіЖЈНкЕу
ОіЖЈНкЕуБъМЧдкЛюЖЏжаПЩЬцЛЛађСаЕФПЊЪМЁЃЦфБъЪЖЗЈЪЧвЛИіПеаФЕФСтаЮ(Шч ЭМ6.21ЫљЪО)ЁЃОіЖЈНкЕуБиаыгЕгаЕЅвЛЕФЪфШыБпЃЌвЛАугЕгаСНИіЛђЖрИіЪфГіБпЁЃУПИі
ЪфГіБпЛсДјгаВМЖћБэДяЪНЕФБъЧЉЃЌФЧНазіМрЬ§ЃЌЯдЪОЮЊЗНРЈКХжаМфЕФзжЗћДЎ(Р§ШчЃЌ ЭМ6.21 жаЕФ isCommandValid
== False)ЁЃ
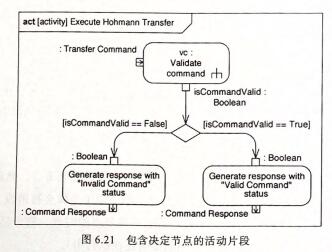 ЁЁ ЁЁ
ЕБвЛИіСюХЦЁЊЁЊПЩФмЪЧЖдЯѓСюХЦЃЌвВПЩФмЪЧПижЦСюХЦЁЊЁЊЕНДяОіЖЈНкЕуЕФЪБКђ, ЪфГіБпЕФМрЬ§ЛсБЛЙРжЕЁЃСюХЦЛсЬсЙЉИјФЧЪБМрЬ§ЙРжЕЮЊецЕФЪфГіБпЁЃ
Фугад№ШЮШЗБЃЪфГіБпЩЯЕФЯЕСаМрЬ§ЭъећЧвЖРСЂЃЌДгЖјШЗБЃУПДЮСюХЦЕНДяЕФЪБКђ,жЛгавЛИіМрЬ§ЕФжЕЛсЪЧецЁЃSysMLдЪаэФуЪЙгУelseзїЮЊ(Жр)вЛИіЪфГіБпЕФМрЬ§ЃЌвд
ШЗБЃТњзуЁАЭъећЁБЕФБъзМЁЃ(ШчЙћЫљгаЦфЫћМрЬ§ЕФЙРжЕЖМЪЧМйЃЌФЧУДelseЕФЙРжЕОЭЪЧецЁЃ)
9.4КЯВЂНкЕу
КЯВЂНкЕуБъМЧЛюЖЏжаПЩбЁађСаЕФНсЮВЁЃЦфБъЪЖЗЈКЭОіЖЈНкЕуЯрЭЌЃКПеаФСтаЮЁЃФу ПЩвдЭЈЙ§ЪфШЫБпКЭЪфГіБпЕФЪ§СПРДЧјЗжЫќУЧ;КЯВЂНкЕугЕгаСНЬѕЛђЖрЬѕЪфШЫБпЃЌЖјжЛ
гЕгавЛИіЪфГіБпЁЃЕБвЛИіСюХЦЁЊЁЊПЩФмЪЧЖдЯѓСюХЦЃЌвВПЩФмЪЧПижЦСюХЦЁЊЁЊЭЈЙ§ШЮвт вЛЬѕЪфШыБпЕНДяКЯВЂНкЕуЃЌСюХЦТэЩЯОЭЛсЬсЙЉИјЪфГіБпЁЃ
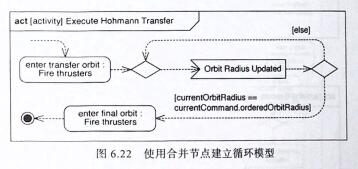
ГЃМћЕФЧщПіЪЧЃЌКЯВЂНкЕуКЭОіЖЈНкЕузщКЯЪЙгУЃЌдкЛюЖЏжаЖдбЛЗНЈФЃ(ШчЭМ6.22 ЫљЪО)ЁЃЪТЪЕЩЯЃЌКЯВЂНкЕуЖдгкНЈСЂбЛЗФЃаЭРДЫЕЗЧГЃживЊЁЃШчЙћетЗљЭМжаЕФКЯВЂНкЕу
БЛЩОГ§(ЫќЕФСНЬѕЪфШыБпжБНггыНгЪмЪТМўЖЏзїСЌНг)ЃЌФЧУДНгЪмЪТМўЖЏзїОЭгРдЖЖМВЛЛсЦє ЖЏЁЃЮЊСЫПЊЪМЃЌЫќашвЊдкУПЬѕЪфШЫБпЩЯЖМгаПижЦСюХЦЃЌетдкбЛЗжаЪЧгРдЖЖМВЛЛсЗЂЩњЕФЁЃ
 ЁЁ ЁЁ
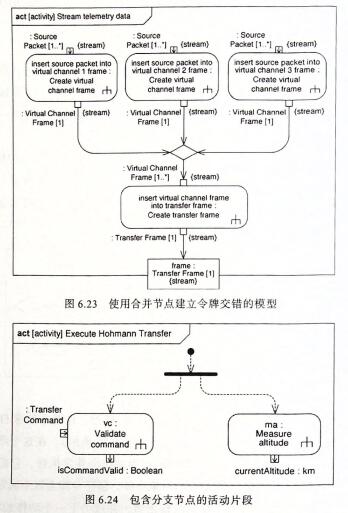
ФуЛЙПЩвдЪЙгУКЯВЂНкЕуРДНЈСЂСюХЦНЛДэЧщПіЕФФЃаЭЃЌетаЉСюХЦРДздЖрИіВЂЗЂЕФ РДдДЃЌФуашвЊАбЫќУЧКЯВЂЕНЕЅвЛЕФЪфГіСїжа(ШчЭМ6.23ЫљЪО)ЁЃдкетИіЛюЖЏжа?ДЅЗЂ
Create virtual channel frameЛюЖЏЕФШ§ИіЕїгУааЮЊЖЏзїЛсВЂЗЂжДааЁЃЫќУЧЛсвдБЫДЫЖР
СЂЕиЪфГіРраЭЮЊVirtual Channel FrameЕФЖдЯѓСюХЦЃЌФЧаЉСюХЦЛсвдВЛШЗЖЈЕФЫГађЕНДя КЯВЂНкЕуЁЃУПИіСюХЦЕНДяКѓЛсТэЩЯЬсЙЉИјЪфГіБпЃЌВЂГЩЮЊЯТвЛИіЖЏзїЕФЪфШыЁЃШЛКѓЃЌ
ФЧИіЖЏзїЛсЪфГіРраЭЮЊTransfer FrameЕФЕЅИіЖдЯѓСюХЦСїЁЃ
9.5 ЗжжЇНкЕу
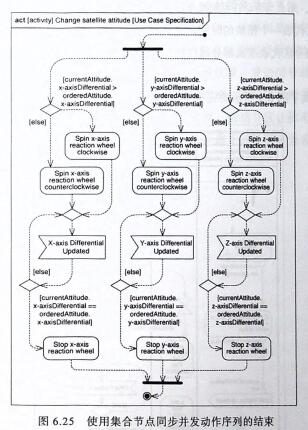
ЗжжЇНкЕуБъМЧЛюЖЏжаВЂЗЂађСаЕФЦ№ЕуЁЃЗжжЇНкЕуЕФБъЪЖЗЈЪЧвЛЬѕЯпЖЮ(ЗНЯђ Ыцвт)ЃЌЫќБиаыгЕгавЛЬѕЪфШЫБпКЭСНЬѕЛђЖрЬѕЪфГіБп(ШчЭМ6.24ЫљЪО)ЁЃЕБвЛИіСю
ХЦЁЊЁЊПЩФмЪЧЖдЯѓСюХЦЃЌвВПЩФмЪЧПижЦСюХЦЁЊЁЊЕНДяЗжжЇНкЕуЕФЪБКђЃЌЫќЛсБЛИДжЦЕНЫљгаЪфГіБпЩЯЁЃдЪМСюХЦЕФУПИіИББОЖМДњБэЖРСЂЁЂВЂЗЂЁЂбизХИїздТЗОЖЧАНјЕФПижЦСїЁЃ
 ЁЁ ЁЁ
ЭМ6.24жаЯдВЛЕФЛюЖЏЦЌЖЮЪЧжЎЧАЭМ6.1жаЫљЪОЕФExecute Hohmann TransferЛюЖЏЕФвЛ
ВПЗжЁЃетИіВПЗжЙизЂЛюЖЏжаЕФЗжжЇНкЕуЁЃПижЦСюХЦЕНДяЗжжЇНкЕуКѓЛсБЛИДжЦЕНСНЬѕЪфГі БпЩЯЁЃШЛКѓФЧСНИіИББОЛсЯђЧАжДааЕНИїздЕФЯТгЮЛюЖЏvcКЭmaЩЯЁЃЖЏзїmaЛсТэЩЯЦєЖЏЃЌ
ЫќВЛЛсЕШД§ШЮКЮЦфЫћЪфШЫЁЃЖјЖЏзїvcЛсдкРраЭЮЊTransfer CommandЕФЖдЯѓСюХЦЕНДяЦф ЪфШЫЫЈЕФЪБКђЦєЖЏЁЃЦєЖЏЕФЪБМфТњзувЛЖЈЬѕМўЪБЃЌСНИіЖЏзїПЩФмдквЛЖЮЪБМфФкВЂаажДааЁЃ
ЙигкВЂЗЂКмживЊЕФвЛЕуЪЧЃЌВЂЗЂЖЏзїЭъГЩЕФЫГађЪЧВЛШЗЖЈЕФЁЃФуЮоЗЈЪТЯШжЊЕРЃЌдкЯЕЭГВйзїЬиЖЈЕФExecute
Hohraann TransferЛюЖЏжаЃЌvcКЭmaФФвЛИіЛсЪзЯШЭъГЩЁЃ ИќзМШЗЕФЫЕЗЈЪЧЃЌФФИіЯШЭъГЩУЛЪВУДЙиЯЕЃЌжЛгадкЫќУЧБЫДЫжЎМфУЛгавРРЕЙиЯЕЕФЪБ
КђЃЌФуВХФмАбЖЏзїНЈСЂЮЊВЂЗЂЕФФЃаЭЁЃ
9.6МЏКЯНкЕу
МЏКЯНкЕуБъiМКЛюЖЏжаВЂЗЂађСаЕФНсЪјЁЃМЏКЯНкЕуЕФБъЪЖЗЈКЭЗжжЇНкЕувЛбљЃКвЛЬѕ ЯпЖЮЁЃФуПЩвдЭЈЙ§ЪфШЫЁЂЪфГіБпЕФЪ§СПРДЧјЗжЫќУЧ;МЏКЯНкЕувЛАугЕгаСНЬѕЛђЖрЬѕЪф
ШЫБпЃЌЖјжЛгавЛЬѕЪфГіБп(ШчЭМ6.25жаЛюЖЏЭМЕФЕзВПЫљЪО)ЁЃ
 ЁЁ ЁЁ
ФуПЩвдЪЙгУМЏКЯНкЕуЮЊЛюЖЏжаВЂЗЂЖЏзїађСаЕФЭЌВНЕуНЈФЃЁЃЕБСюХЦЕНДяУПЬѕЪфШы БпЕФЪБКђЃЌОЭЛсгаЕЅИіСюХЦЬсЙЉИјЪфГіБпЁЃВЂЗЂађСаНсЪјЃЌвЛЬѕПижЦСїЛсЭЈЙ§МЏКЯНк
ЕуЫљБъМЧЕФЕуЃЌМЬајжДааЁЃ
10ЁЂЛюЖЏЗжЧјЃКАбааЮЊЗжХфИјНсЙЙ
ЛюЖЏЭМВЛНіПЩвдДЋДяЛюЖЏжаЖЏзїЕФЫГађЃЌЖјЧвЛЙПЩвдДЋДяжДааУПИіЖЏзїЕФНсЙЙЁЃ ФуПЩвдЪЙгУЛюЖЏЗжЧјРДБэЪОЁЃЛюЖЏЗжЧјЕФБъЪЖЗЈЪЧвЛИіДѓОиаЮ(АќКЌвЛИіЛђЖрИіНк
Еу)ЃЌдквЛЖЫгаЭЗВПФкШн;ЭЗВПФкШнЛсжИЖЈЛюЖЏЗжЧјДњБэЪВУДЁЃЛюЖЏЗжЧјЕФЗНЯђПЩФм ЪЧЫЎЦНЕФЃЌвВПЩФмЪЧДЙжБЕФЃЌЕЋЪЧФГаЉНЈФЃЙЄОпПЩФмжЛжЇГжЦфжавЛжжЗНЯђЁЃ
ЛюЖЏЗжЧјГЃМћЕФЧщПіЯТЛсДњБэДцдкгкЯЕЭГФЃаЭФГДІЕФвЛИіФЃПщЛђепвЛИізщГЩВПЗж ЪєадЁЃдкЛюЖЏЗжЧјжаЗХжУвЛИіЖЏзїБэЪОИУЖЏзїБЛЗжХфИјвЛИіУћГЦгЩЭЗИч;ОіЖЈЕФЙЙ,ЃКШчЙћ
жЛЪЧМђЕЅЕиЗХжУЃЌФЧУДЕБЛюЖЏдкЯЕЭГВйзїЙ§ГЬжажДааЕФЪБКђЃЌНсЙЙОЭЛсИКд№жДааФЧИіЖЏзїЁЃ
ЕБЛюЖЏЗжЧјДњБэвЛИіФЃПщЕФЪБКђЃЌЫќБэЪОФЧИіФЃПщЕФЫљгаЪЕР§ЖМФмЙЛжДааЦфжаАќКЌ ЕФЖЏзїЁЃЕБЛюЖЏЗжЧјДњБэзщГЩВПЗжЪєадЕФЪБКђЃЌФЧУДжЛЪЧФЧИізщГЩВПЗжЧќадЛсИКд№жДаа
ЫљАќКЌЕФЖЏзїЁЃ
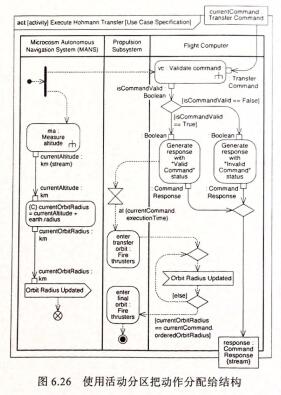
ЭМ6.26ЬсЙЉСЫЭМ6.1ЫљЪОЕФЭъећExecute Hohmann TransferЛюЖЏЕФСэвЛжжЪгЭМЁЃ
 ЁЁ ЁЁ
етРяЯдЪОЕФЖЏзїКЭжЎЧАЭъШЋвЛбљЁЃЕЋЪЧЃЌетИіЪгЭМЛЙЯдЪОСЫШ§ИіЛюЖЏЗжЧјЃЌБэЪОФЧ аЉЖЏзїБЛЗжХфИјЯЕЭГФЃаЭЕФШ§ИіВЛЭЌЕФФЃПщЃКMicrocosm
Autonomous Navigation System ( MANS)ЁЂPropulsion Subsystem
КЭ Flight ComputerЁЃетИіЪгЭМБэЯжЕФ Execute Hohmann TransferИќШнвзРэНтЁЊЁЊетжжБэЪіАбааЮЊгыНсЙЙЯрСЌНгЁЃ
аЁНс
ЛюЖЏЭМЪЧвЛжжЧПДѓЕФаХЯЂЙЕЭЈУННщЃЌФуПЩвдЫцзХЪБМфЕФЭЦвЦЪЙгУЫќгыРћвцЯрЙиеп ЙЕЭЈЯЕЭГЕФааЮЊЁЃЕБФуашвЊЯдЪОГжајЕФЯЕЭГааЮЊЃЌВЂЧвашвЊЙизЂЪТМўЁЂФмСПКЭЪ§ОнЕФ
СїдквЛЯЕСаЖЏзїжЎМфЕФСїЖЏ(ПЩФмЪЧДЎааЛђепВЂаа)ЪБЃЌетжжЭМЪЧКмКУЕФбЁдёЁЃЛюЖЏ ЭМЕФжиДѓгХЪЦдкгкЫќЕФПЩЖСадЃЌМДБуЫљЯдЪОЕФааЮЊгЕгаИДдгЕФПижЦТпМЁЃ
ФуПЩвддкЛюЖЏжаДДНЈЕїгУааЮЊЖЏзїРДЮЊааЮЊЗжНтНЈФЃЁЃЗЂЫЭаХКХЖЏзїКЭНгЪмЪТМў
ЖЏзїШУФуПЩвдЮЊЗжВМЪНЯЕЭГжаНсЙЙжЎМфЕФвьВНЭЈаХНЈФЃЁЃФуПЩвдЪЙгУЕШД§ЪБМфЖЏзїЮЊ жмЦкадЗЂЩњЕФааЮЊЛђепдкЬиЖЈЪБМфЕуЗЂЩњЕФааЮЊНЈФЃЁЃЛюЖЏЗжЧјШУФуПЩвдЮЊЛюЖЏжаЕФ
ЖЏзїЗжХфжАд№ЃЌвджИЖЈЯЕЭГжаЕФНсЙЙЁЃЫљгаетаЉЬиадЖМШУЛюЖЏЭМГЩЮЊБэДяЯЕЭГааЮЊЕФ ЁЊжжвтвхЗсИЛЕФУННщЁЃ
|








