| БрМЭЦМі: |
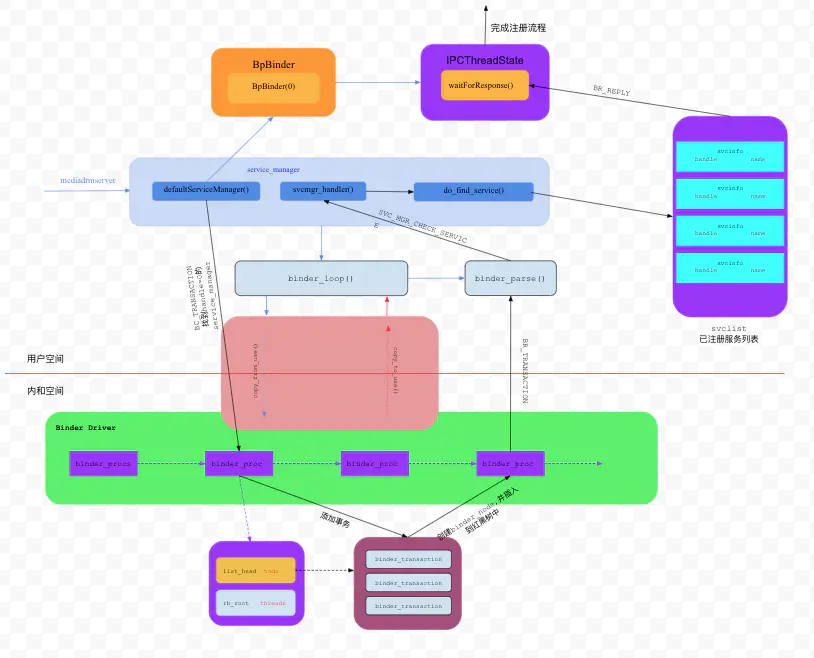
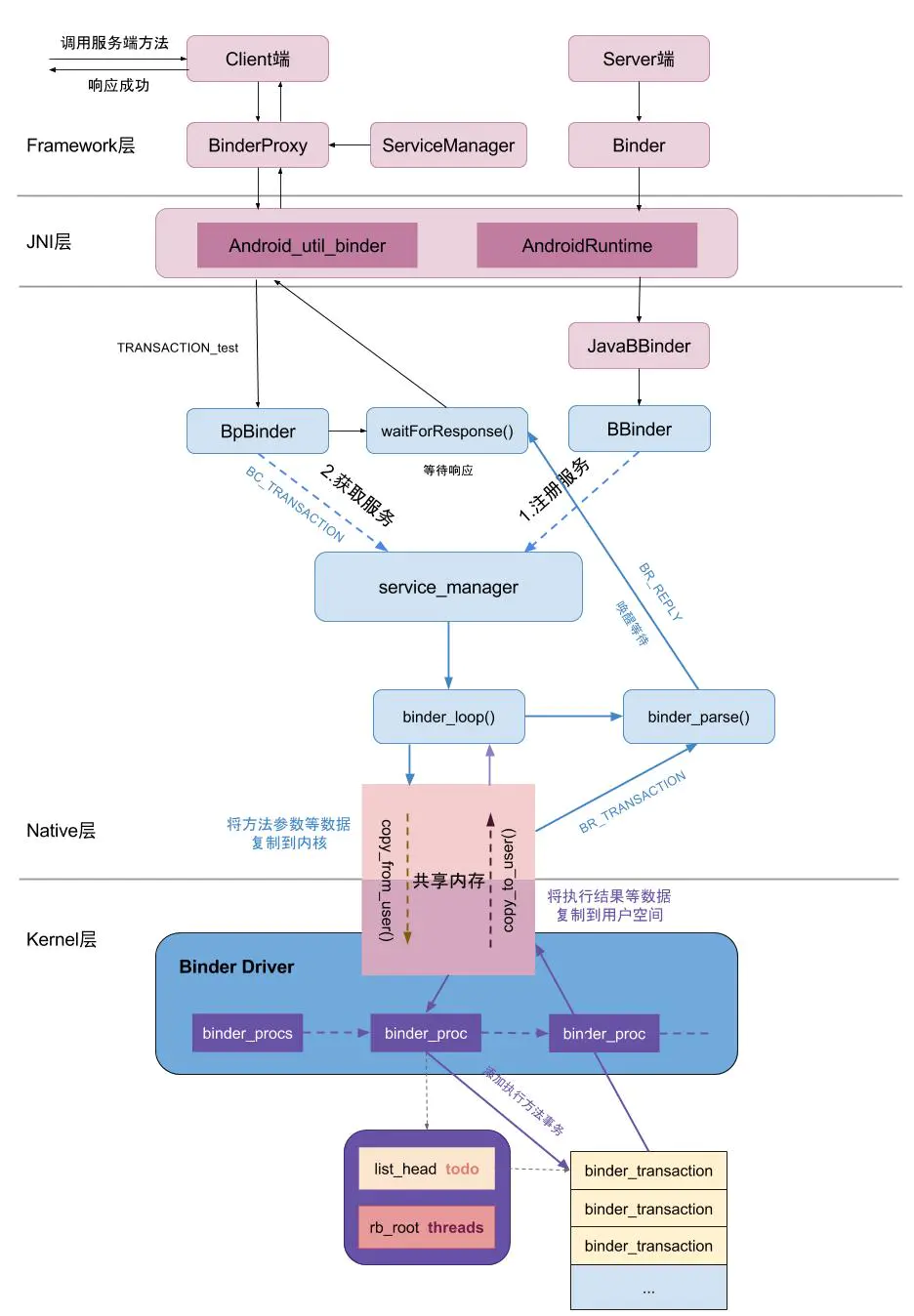
БОЮФжївЊНщЩмСЫBinderМмЙЙЁЂЛљДЁЪ§ОнНсЙЙЁЂBinderЧ§ЖЏЁЂNativeВуМЖЕФBinderНсЙЙЁЂBinderЭЈаХЛњжЦЁЂBinderНјГЬгыЯпГЬЁЂServiceManagerВщевЗўЮёЁЂЭъећЕФЭЈаХСїГЬ
ЕШЯрЙиФкШнЁЃ
БОЮФРДздгкМђЪщЃЌгЩЛ№СњЙћШэМўAnnaБрМЁЂЭЦМіЁЃ |
|
Binder
BinderЪЧЪВУДЃП
BinderЪЧвЛжжНјГЬМфЭЈаХЛњжЦ
ЮЊЪВУДЪЧBinderЃП
BinderМмЙЙ
BinderЭЈаХЛњжЦВЩгУC/SМмЙЙЃЌетКмживЊЃЁЃЁЃЁ
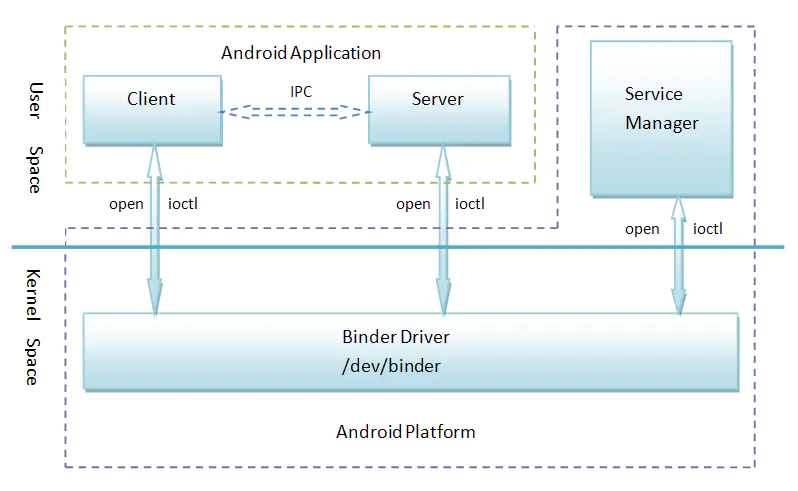
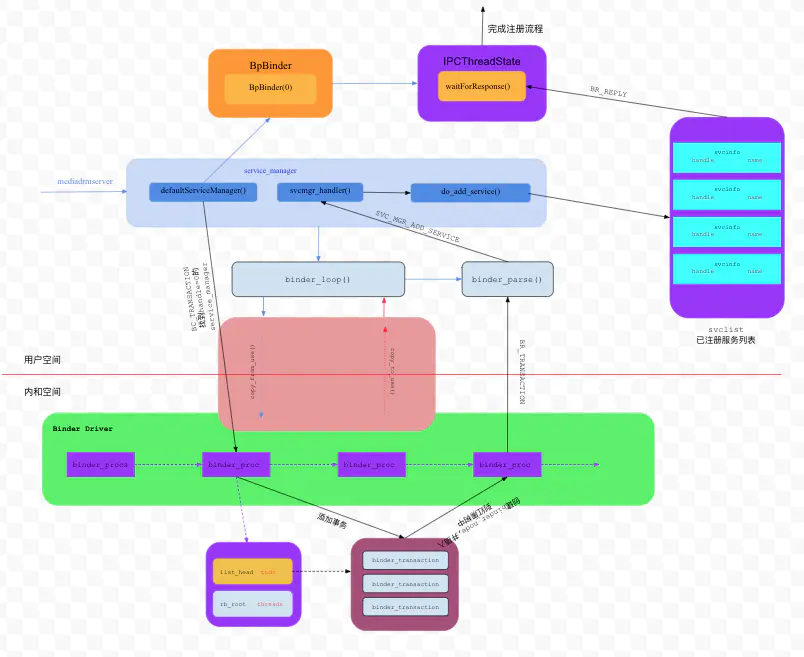
@BinderМмЙЙ|center
BinderПђМмжажївЊЩцМАЕН4ИіНЧЩЋClientЁЂServerЁЂService ManagerМАBinderЧ§ЖЏЃЌЦфжаClientЁЂServerЁЂService
ManagerдЫаадкгУЛЇПеМфЃЌBinderЧ§ЖЏдЫаадкФкКЫПеМф
ClientДњБэПЭЛЇЖЫНјГЬЃЌServerДњБэПЭЛЇЖЫНјГЬЬсЙЉИїжжЗўЮёЃЌШчвєЪгЦЕЕШ
Service ManagerгУРДЙмРэИїжжЯЕЭГЗўЮё
BinderЧ§ЖЏЬсЙЉНјГЬМфЭЈаХЕФФмСІ
гУЛЇПеМфЕФClientЁЂServerЁЂServiceManagerЭЈЙ§openЁЂmmapКЭioctlЕШБъзМЮФМўВйзї(ЯъМћUnixЛЗОГБрГЬ)РДЗУЮЪ/dev/binderЃЌНјЖјЪЕЯжНјГЬМфЭЈаХ
ЛљДЁЪ§ОнНсЙЙ
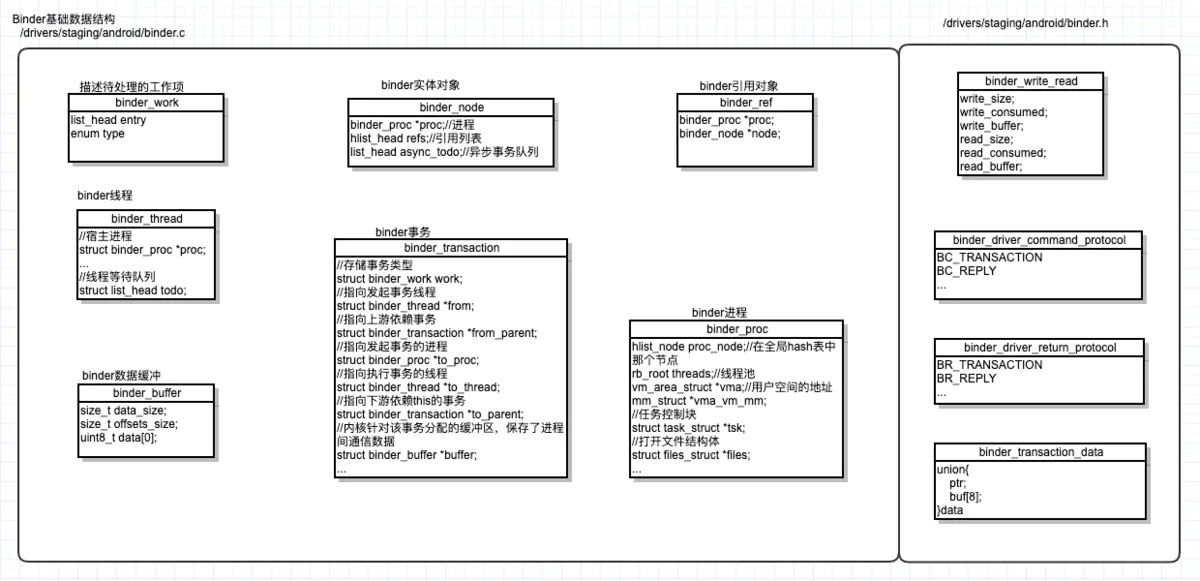
BinderЛљДЁЪ§Он
ЙигкBinderЛљДЁЪ§ОнЃЌМћЩЯЭМ
BinderקƏ

BinderЧ§ЖЏЙЄзїЭМ
/kernel/drivers/staging/android/binder.c
device_initcall(binder_init); |
ЩшБИГѕЪМЛЏЪБКђЛсЕїгУbinder_initНјааbinderЧ§ЖЏГѕЪМЛЏ
/kernel/drivers/staging/android/binder.c
//АѓЖЈbinderЧ§ЖЏВйзїКЏЪ§
static const struct file_operations binder_fops
= {
.owner = THIS_MODULE,
.poll = binder_poll,
.unlocked_ioctl = binder_ioctl,
.compat_ioctl = binder_ioctl,
.mmap = binder_mmap,
.open = binder_open,
.flush = binder_flush,
.release = binder_release,
};
//ДДНЈmiscРраЭЕФЧ§ЖЏ
static struct miscdevice binder_miscdev = {
.minor = MISC_DYNAMIC_MINOR,
.name = "binder",
.fops = &binder_fops//АѓЖЈbinderЧ§ЖЏВйзїКЏЪ§
};
//binderЧ§ЖЏГѕЪМЛЏ
static int __init binder_init(void)
{
int ret;
binder_deferred_workqueue = create_singlethread_workqueue("binder");
if (!binder_deferred_workqueue)
return -ENOMEM;
//ДДНЈФПТМ/binder
binder_debugfs_dir_entry_root = debugfs_create_dir("binder",
NULL);
if (binder_debugfs_dir_entry_root)
//ДДНЈФПТМ/binder/proc
binder_debugfs_dir_entry_proc = debugfs_create_dir("proc",
binder_debugfs_dir_entry_root);
//зЂВсbinderЧ§ЖЏ
ret = misc_register(&binder_miscdev);
//ДДНЈЦфЫћЮФМў
if (binder_debugfs_dir_entry_root) {
//ДДНЈЮФМў/binder/proc/state
debugfs_create_file("state",
S_IRUGO,
binder_debugfs_dir_entry_root,
NULL,
&binder_state_fops);
//ДДНЈЮФМў/binder/proc/stats
debugfs_create_file("stats",
S_IRUGO,
binder_debugfs_dir_entry_root,
NULL,
&binder_stats_fops);
//ДДНЈЮФМў/binder/proc/transactions
debugfs_create_file("transactions",
S_IRUGO,
binder_debugfs_dir_entry_root,
NULL,
&binder_transactions_fops);
//ДДНЈЮФМў/binder/proc/transaction_log
debugfs_create_file("transaction_log",
S_IRUGO,
binder_debugfs_dir_entry_root,
&binder_transaction_log,
&binder_transaction_log_fops);
//ДДНЈЮФМў/binder/proc/failed_transaction_log
debugfs_create_file("failed_transaction_log",
S_IRUGO,
binder_debugfs_dir_entry_root,
&binder_transaction_log_failed,
&binder_transaction_log_fops);
}
return ret;
} |
ГѕЪМЛЏжївЊзіСЫСНМўЪТЧщ
ГѕЪМЛЏДцДЂbinderДцДЂаХЯЂЕФФПТМ
ДДНЈbinderЩшБИЃЌВЂАѓЖЈВйзїКЏЪ§Шчbinder_openЁЂbinder_mmapЁЂbinder_ioctlЕШ
ЩшБИЦєЖЏЪБКђЃЌЛсЕїгУbinder_initЃЌжївЊзіСНМўЪТЧщ
1.ДДНЈ/binder/procФПТМЃЌжЎКѓдкетИіФПТМЯТДДНЈstateЁЂstatsЁЂtransactionsЁЂtransaction_logЁЂfailed_transaction_logЮФМўМаЃЌЗжБ№ДцДЂНјГЬЭЈаХЕФИїжжЪ§Он
2.зЂВсЧ§ЖЏЃЌВЂАѓЖЈЮФМўВйзїКЏЪ§binder_openЁЂbinder_mmapЁЂbinder_ioctlЕШЃЌжЎКѓОЭПЩвдЭЈЙ§RPCЛњжЦШЅЗУЮЪbinderЧ§ЖЏ
NativeВуМЖЕФBinderНсЙЙ
@ServerзщМўРрЭМ|center
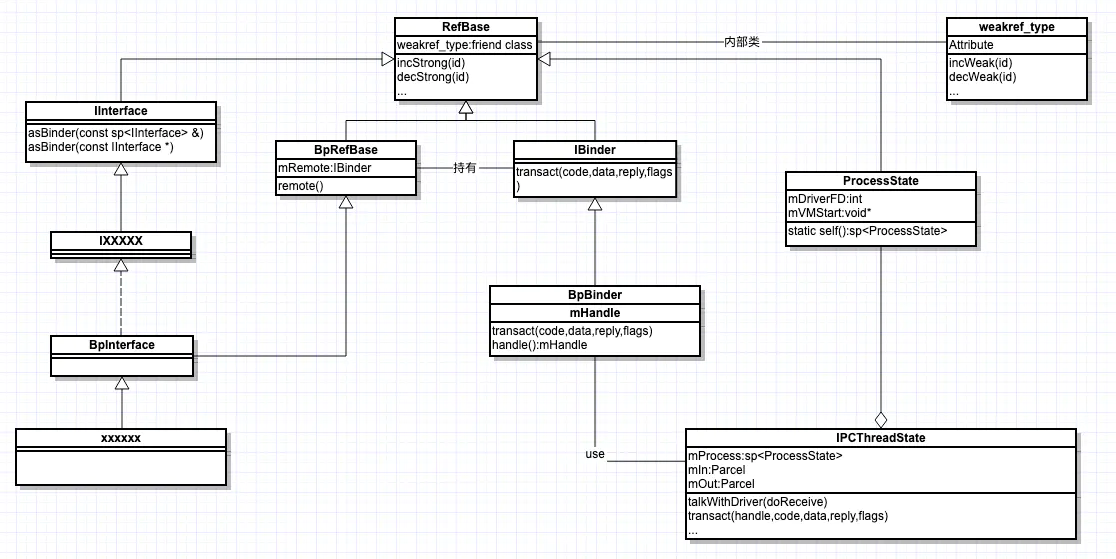
@ClientзщМўРрЭМ|center
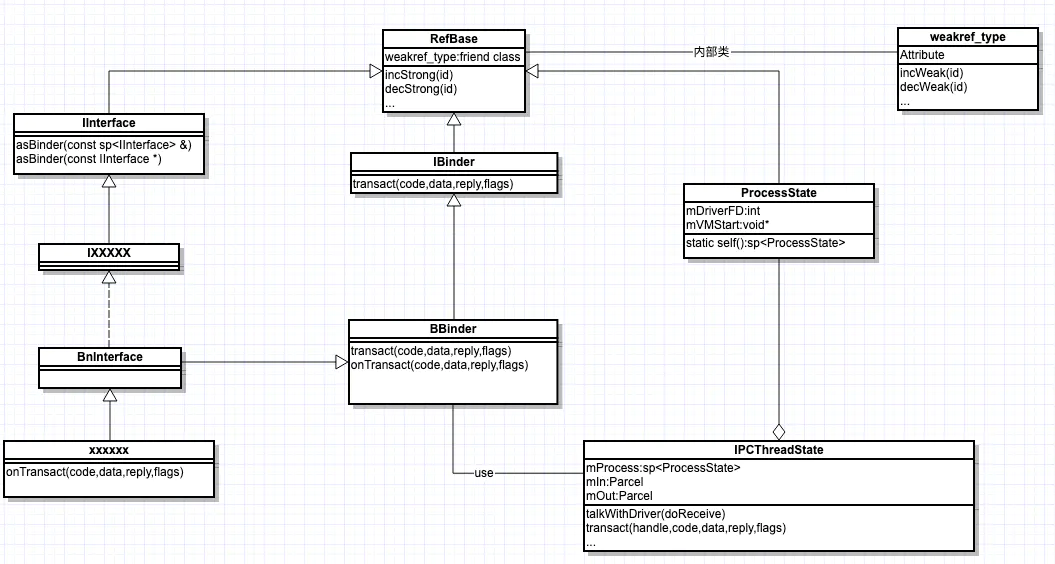
BinderЭЈаХЛњжЦ
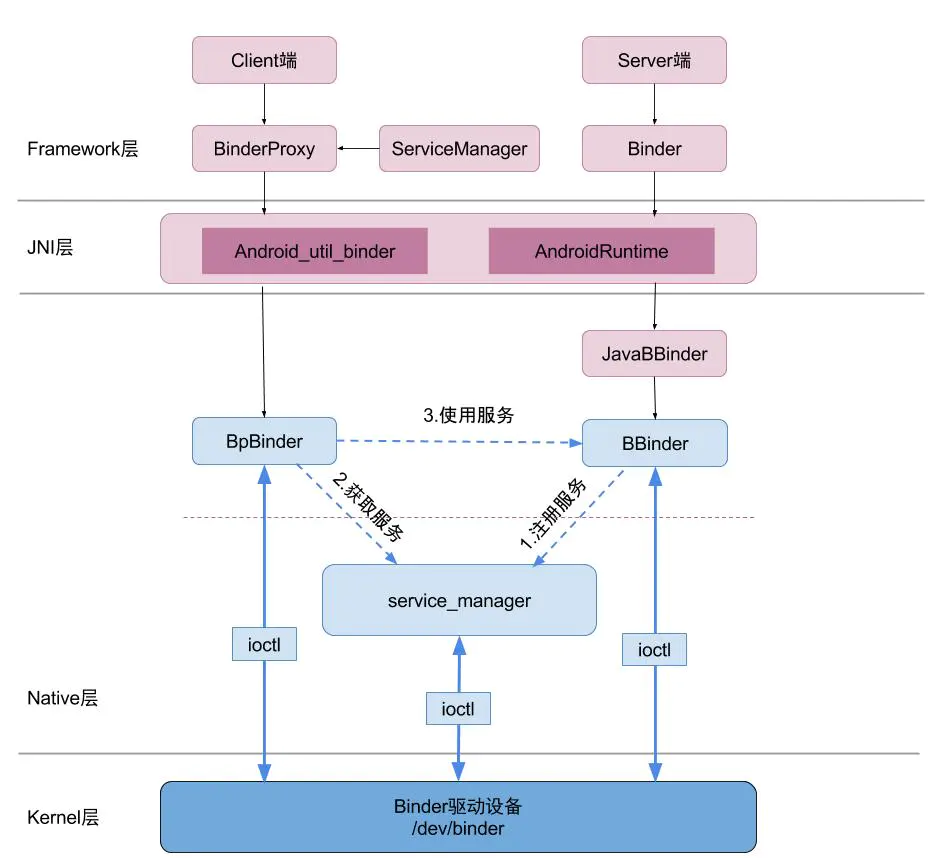
@BinderЗжВу|center
BinderНјГЬгыЯпГЬ
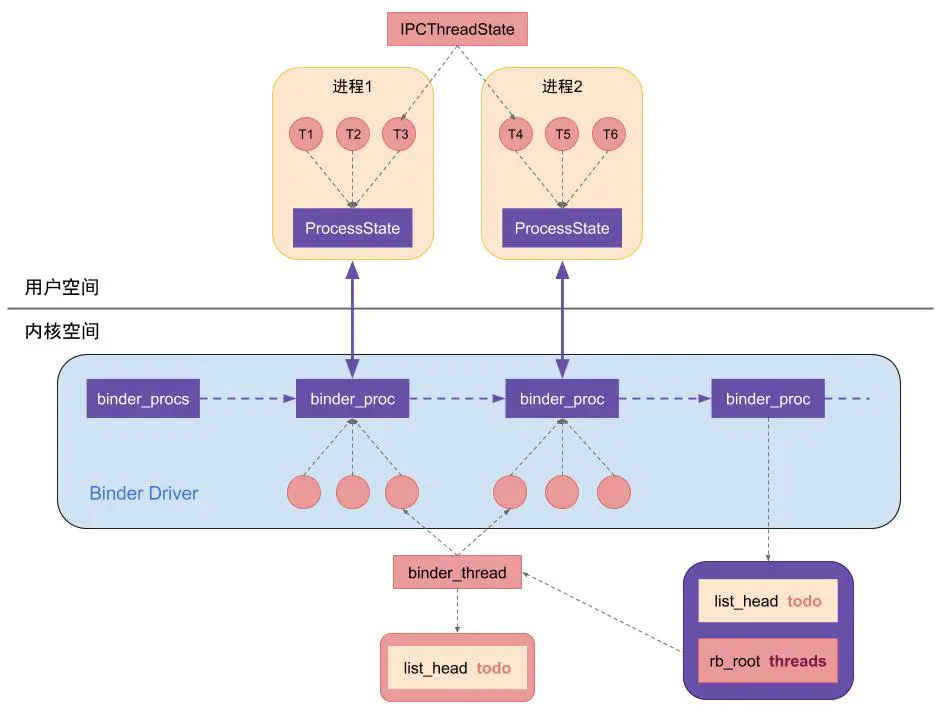
@BinderЧ§ЖЏжаЕФЯпГЬгыгУЛЇПеМфЕФЯпГЬ
ServiceManagerЦєЖЏ
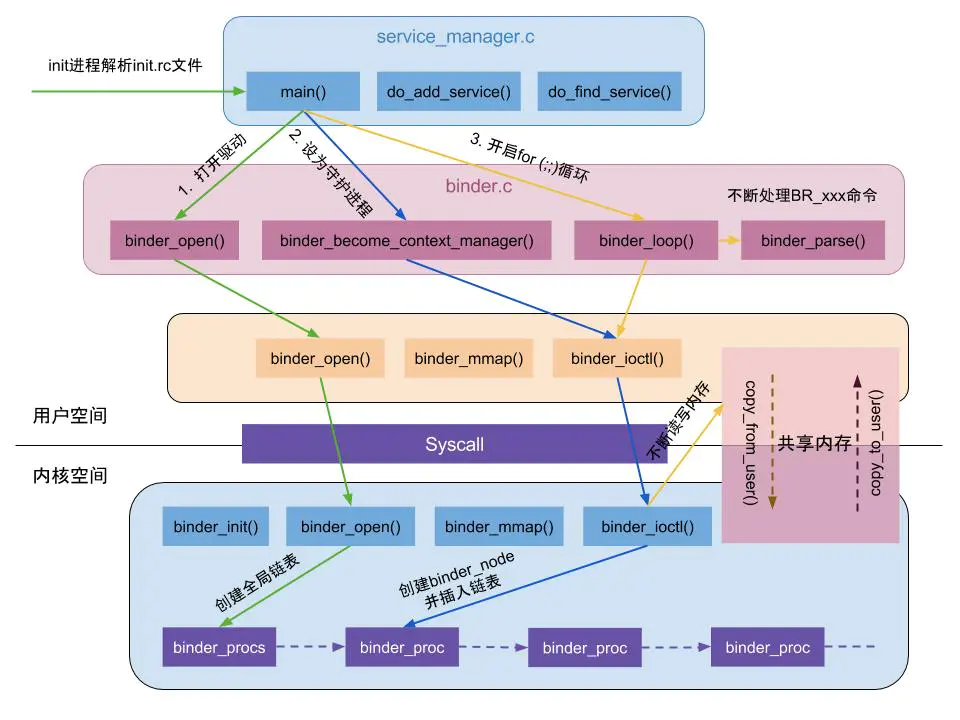
@ServiceManagerЦєЖЏ
дЄБИжЊЪЖВЙГф
ServiceManagerЦєЖЏСїГЬжївЊЗжЮЊШ§ИіСїГЬ
1.вдЯЕЭГЗўЮёаЮЪНЦєЖЏservice_manager,жЎКѓЭЈЙ§дкbinder_openКЏЪ§ДђПЊЧ§ЖЏЩшБИЃЌЧ§ЖЏВуЯргІЕФОЭЛсДДНЈservice_managerЖдгІЕФbinder_procЃЌВЂЧветЪЧИіЬиЪтЕФservice
2.ЕїгУbinder_become_context_managerЭЈЙ§ioctlЕїгУФкКЫжаЕФbinder_ioctl,ОЙ§вЛЯЕСаДІРэКѓЃЌbinderЧ§ЖЏЛсНЋетИіЬиЪтЕФbinder_nodeДцЕНОВЬЌжИеыbinder_context_mgr_node
static struct
binder_node *binder_context_mgr_node;
...
static int binder_ioctl_set_ctx_mgr (struct
file *filp)
{
...
//зЂвтетРяКѓајСНИіВЮЪ§ЖМЪЧ0
binder_context_mgr_node = binder_new_node(proc,
0, 0);
...
}
... |
3.ЕїгУbinder_loopНјШыбЛЗНтЮіЕФЙ§ГЬ
int main(int
argc, char** argv){
...
//НјШыбЛЗЃЌЕШД§ЛђДІРэClientНјГЬЕФЭЈаХЧыЧѓ
binder_loop(bs, svcmgr_handler);
...
} |
етРяжИЖЈбЛЗДІРэКЏЪ§ЮЊsvcmgr_handler,КѓајдйзаЯИЗжЮіетИіКЏЪ§ЃЌЯШПДbinder_loopЪЕЯж
void binder_loop
(struct binder_state *bs, binder_handler func)
{
...
//ЭЈаХЪ§Он
struct binder_write_read bwr;
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
readbuf[0] = BC_ENTER_LOOPER;
binder_write(bs, readbuf, sizeof(uint32_t));
for (;;) {
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (uintptr_t) readbuf;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
...
//НтЮі
res = binder_parse(bs, 0, (uintptr_t) readbuf,
bwr.read_consumed, func);
...
}
}
int binder_write (struct binder_state *bs,
void *data, size_t len)
{
struct binder_write_read bwr;
int res;
bwr.write_size = len;
bwr.write_consumed = 0;
bwr.write_buffer = (uintptr_t) data;
bwr.read_size = 0;
bwr.read_consumed = 0;
bwr.read_buffer = 0;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
...
return res;
} |
ЪзЯШДДНЈвЛИіbinder_write_readНсЙЙЬхЃЌШЛКѓЭЈЙ§binder_writeЯђBinderЧ§ЖЏаДШыУќСюавщBC_ENTER_LOOPERЃЌзЂвтетИіРэЪфГіЛКГхЧјЪЧУЛгаЪ§ОнЕФ,binderЧ§ЖЏОЙ§вЛЯЕСаДІРэНјШыбЛЗзДЬЌЃЌжЎКѓЭЈЙ§вЛИіЫРбЛЗРДВЛЖЯЕФДгBinderЧ§ЖЏЖСШЁЪ§ОнЃЌжЎКѓНЛгЩbinder_parseШЅНтЮіИїжжавщЪ§ОнЃЌКѓајдйЗжЮіЯИНк
BinderЧ§ЖЏЪЧШчКЮДІРэНЛЛЅЯИНкЕФЃЌЮвУЧРДПДЯТbinder_ioctl_write_readЕФЪЕЯж
static int
binder_ioctl_write_read (struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
...
//ДгЮФМўОфБњШЁГіНјГЬаХЯЂ
struct binder_proc *proc = filp->private_data;
//УќСюавщ
unsigned int size = _IOC_SIZE(cmd);
...
struct binder_write_read bwr;
//ШЁГіbwrНјГЬЭЈаХавщдиЬх
if (copy_from_user(&bwr, ubuf, sizeof(bwr)))
{
...
}
//ШчЙћгааДШыЪ§ОнЃЌОЭНЛгЩbinder_thread_writeШЅДІРэЃЌжЎКѓ
//ЭЈЙ§copy_to_userНЋЪ§ОнЗЕЛЙИјгУЛЇПеМф
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread,
bwr.write_buffer,
bwr.write_size,
&bwr.write_consumed);
...
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
...
goto out;
}
}
//ШчЙћгаЪфГіЪ§ОнЃЌдђЕїгУbinder_thread_readНтЮіЃЌ
//жЎКѓХаЖЯНјГЬЕФЪТЮёЖгРяЪЧЗёЮЊПеЃЌШчЙћВЛЮЊПеОЭЕШД§жДаа
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
...
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
//НЋаДГіЪ§ОнЗЕЛЙИјгУЛЇПеМф
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
...
goto out;
}
}
...
out:
return ret;
}
|
жСгкbinder_thread_writeгыbinder_thread_readдђЪЧДІРэУќСюа(binder_driver_command_protocol)гыЗЕЛиавщ(binder_driver_return_protocol
)ЯъМћ/drivers/staging/android/binder.h
ServiceManagerзЂВсЗўЮё
@ServiceЕФзЂВсСїГЬ|center
serviceЕФзЂВсСїГЬШчЩЯЭМЃЌетРявдmedia_serverЕФзЂВсЮЊР§згШЅПДДњТы
/frameworks/av/services/
mediadrm/mediadrmserver.cpp
int main()
{
...
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
...
MediaDrmService::instantiate();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
} |
ПЩвдПДЕНвдгУЛЇШЈЯоЦєЖЏmediadrmЗўЮёЃЌЮФМўЮЛгк/system/bin/mediadrmserver
НгЯТРДПДmain_mediadrmserver.cpp
/frameworks/av/services/
mediadrm/mediadrmserver.cpp
int main()
{
...
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
...
MediaDrmService::instantiate();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
} |
main()жажївЊзіСЫСНМўЪТЧщЃК
1.ГѕЪМЛЏMediaDrmService
2.ЯпГЬГиГѕЪМЛЏ
ЯШПДЕквЛИі
/frameworks/av/services/
mediadrm/MediaDrmService.cpp
...
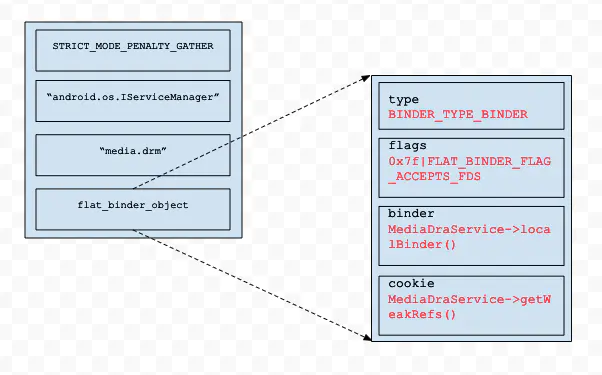
void MediaDrmService::instantiate() {
defaultServiceManager()->addService(
String16("media.drm"), new MediaDrmService());
}
... |
етРяУцжївЊЭЈЙ§defaultServiceManager()ЛёШЁвЛИіBpServiceManagerжИеыШЛКѓЕїгУaddServiceЃЌзЂвтетРяДЋШыЕФСНИіВЮЪ§ЁАmedia.drmЁБКЭвЛИіMediaDrmServiceЖдЯѓ
ServiceManagerДњРэЖдЯѓЕФЛёШЁ
ЯШРДПДdefaultServiceManager()ЕїгУ
/frameworks/native/libs/
binder/Static.cpp
...
sp<IServiceManager> gDefaultServiceManager;
...
/frameworks/native/libs/ binder/ISerivceManager.cpp
...
sp<IServiceManager> defaultServiceManager()
{
if (gDefaultServiceManager != NULL)
return gDefaultServiceManager;
{
...
while (gDefaultServiceManager == NULL) {
gDefaultServiceManager = interface_cast<IServiceManager>(
ProcessState:: self()->getContextObject(NULL));
...
}
}
return gDefaultServiceManager;
}
... |
gDefaultServiceManagerОЭЪЧвЛИіIServiceMangerЕФжИеы
ЪзДЮЛёШЁЪБКђвЛЖЈЪЧЭЈЙ§interface_cast<IServiceManager>(ProcessState::self()
->getContextObject(NULL))етвЛЯЕСаmethodЕїгУЛёШЁЕФЃЌвЛВНВНЗжЮі
ЯШПДProcessState::self()
/frameworks/native/libs/binder/ProcessState
...
sp<ProcessState> ProcessState::self()
{
Mutex::Autolock _l(gProcessMutex);
if (gProcess != NULL) {
return gProcess;
}
//зЂвтетРяЕФЮФМўname
gProcess = new ProcessState("/dev/binder");
return gProcess;
}
...
|
ЮвЖФАыАќРБЬѕЃЌетИіРрЙЙдьвЛЖЈГжгаДђПЊ/dev/binderЕФОфБњЃЌВЛаХФуПДЙЙдьЩљУї
//етРяЪЧcppЙЙдьКЏЪ§аЮЪНЃЌОЭЪЧГЩдББфСПИГжЕ
ProcessState::ProcessState(const char *driver)
: mDriverName(String8(driver))
, mDriverFD(open_driver(driver))
, mVMStart(MAP_FAILED)
, mThreadCountLock(PTHREAD_MUTEX_INITIALIZER)
, mThreadCountDecrement(PTHREAD_COND_INITIALIZER)
, mExecutingThreadsCount(0)
, mMaxThreads(DEFAULT_MAX_BINDER_THREADS)
, mStarvationStartTimeMs(0)
, mManagesContexts(false)
, mBinderContextCheckFunc(NULL)
, mBinderContextUserData(NULL)
, mThreadPoolStarted(false)
, mThreadPoolSeq(1)
{
if (mDriverFD >= 0) {
// mmap the binder, providing a chunk of virtual
address space to receive transactions.
//зЂвтетРяЗжХфЕФBINDER_VM_SIZEЮЊ1016kbЃЌОпЬхМћКъЖЈвхДІ
mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ,
MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
if (mVMStart == MAP_FAILED) {
...
close(mDriverFD);
mDriverFD = -1;
mDriverName.clear();
}
}
...
} |
дйРДПДgetContextObject
sp<IBinder>
ProcessState:: getContextObject (const sp<IBinder>&
/*caller*/)
{
//зЂвтетРяДЋШыЕФжЕЮЊ0
return getStrongProxyForHandle(0);
}
...
sp<IBinder> ProcessState:: getStrongProxyForHandle(int32_t
handle)
{
sp<IBinder> result;
...
handle_entry* e = lookupHandleLocked(handle);
if (e != NULL) {
...
b = BpBinder::create(handle);
e->binder = b;
if (b) e->refs = b->getWeakRefs();
result = b;
}else{
...
}
return result;
} |
getContextObject()ФкВПЪЧЕїгУgetStrongProxyForHandle(0)РДЛёШЁвЛИіIBinderжИеы(етРя0ЦфЪЕОЭЪЧЮЊСЫКѓајВщевжЎЧАServiceManagerЦєЖЏзЂВсФЧИіЬиЪтЕФServiceзщМў)ЃЌПЩвдПДЕНЦфЪЕетРяДДНЈЕФЪЧвЛИіBpBinderЖдЯѓЃЌВЂЧвЫћЕФОфБњжЕЪЧ0
ЮвУЧРДПДBpBinderЕФЯрЙиЕїгУ
frameworks/native/libs/binder/BpBinder.cpp
//handleОфБњжЕ гыbinderЧ§ЖЏжаЕФbinderв§гУЖдЯѓНјааЙиСЊ
BpBinder::BpBinder (int32_t handle, int32_t
trackedUid)
//зЂвтетРяДЋШыЕФЪЧ0
: mHandle(handle)
//зЂвтетИіжЕЮЊ1
, mAlive(1)
, mObitsSent(0)
, mObituaries(NULL)
, mTrackedUid(trackedUid)
{
...
IPCThreadState::self()->incWeakHandle(handle,
this);
}
BpBinder* BpBinder::create(int32_t handle)
{
...
return new BpBinder(handle, trackedUid);
} |
ЛиЕНdefaultServiceManager()ЃЌзюКѓinterface_cast<IServiceManager>(BpBinder(0))ЪЕМЪЩЯзЊЛЛГЩСЫетИіЃЌетИідкФФРяЖЈвхФиЃП
/frameworks/native/include/
binder/IInterface.h
template<typename INTERFACE>
inline sp<INTERFACE> interface_cast (const
sp<IBinder>& obj)
{
return INTERFACE::asInterface(obj);
}
|
ЗЂЯжЫћЪЧИіФкСЊФЃАхКЏЪ§ЃЌЪЕМЪЩЯЕїгУЕФЪЧIServiceManager::asInterface(BpBinder(0))ЃЌФЧУДIServiceManager::asInterfaceдкФФРяЖЈвхФиЃП
/frameworks/native/libs/binder/
IServiceManager.cpp
IMPLEMENT_META_INTERFACE(ServiceManager, "android.os.IServiceManager"); |
ПДЩЯУцетИіКъЖЈвхЃЌЪЕМЪЖЈвхдк
/frameworks/native/include/binder/IInterface.h
#define IMPLEMENT_META_INTERFACE
(INTERFACE, NAME)
const ::android::String16 I ##INTERFACE::descriptor(NAME);
const ::android::String16&
I##INTERFACE::getInterfaceDescriptor() const
{
return I##INTERFACE::descriptor;
}
::android::sp<I##INTERFACE> I##INTERFACE::asInterface(
const ::android::sp<:: android::IBinder>&
obj)
{
::android::sp<I## INTERFACE> intr;
if (obj != NULL) {
intr = static_cast<I##INTERFACE*>(
obj->queryLocalInterface(
I##INTERFACE::descriptor).get());
if (intr == NULL) {
intr = new Bp##INTERFACE(obj);
}
}
return intr;
}
I##INTERFACE::I##INTERFACE() { }
I##INTERFACE::~I##INTERFACE() { } |
ДјШызЊЛЛЯТЃЌЗЂЯжЮвУЧФУЕНЕФЦфЪЕОЭЪЧвЛИіBpServiceManager
НгЯТРДЮвУЧРДПДКѓајЕФЕїгУ
BpServiceManager#addService
virtual status_t
addService (const String16& name, const
sp<IBinder>& service,bool allowIsolated,
int dumpsysPriority) {
//етРяdataБэЪОвЊаДШыЕФЪ§ОнЃЌreplyБэЪОЗЕЛиЕФЪ§Он
Parcel data, reply;
//ДцДЂУшЪіЗћ"android.os.IServiceManager"
data.writeInterfaceToken (IServiceManager::getInterfaceDescriptor());
//ДцДЂЗўЮёУћзж"media.drm"
data.writeString16(name);
//ДцДЂЗўЮёMediaDrmService
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
data.writeInt32(dumpsysPriority);
status_t err = remote()-> transact(ADD_SERVICE_TRANSACTION,
data, &reply);
return err == NO_ERROR ? reply.readExceptionCode()
: err;
} |
етРяЪЕМЪЩЯАбЩЯвЛВНДЋШыЕФЪ§ОнЭЈЙ§ParcelДцЦ№РДЃЌШЛКѓЕїгУremote()ЛёШЁвЛИіBpBinderШЛКѓЕїгУЦфtransactЃЌДЋШыЕФcodeЮЊADD_SERVICE_TRANSACTIONЃЌОЙ§АќзАКѓdataжаЕФЪ§ОнГЄетбљзг
@ParcelЪ§ОнЗтзА|center
МЧЯТРДЮвУЧШЅПДBpBinder#transact
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel*
reply, uint32_t flags)
{
// Once a binder has died, it will never come
back to life.
//ЙЙдьжаmAlive=1ЃЌЫљвдетРяЛсзпНјif
if (mAlive) {
//етРяЕїгУЕФЪЧIPCThreadState#transact
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
} |
ЧАУцServiceManagerДњРэЖдЯѓЛёШЁBpBinderЪБКђЃЌmHandleЮЊ0ЃЌcodeЮЊADD_SERVICE_TRANSACTIONЃЌdataДцДЂbinderаХЯЂЃЌreplyДцДЂвЊЗЕЛиЕФаХЯЂЃЌflagsВщПДmethodЖЈвхФЌШЯВЮЪ§ЮЊ0
НгЯТРДЗжЮіIPCThreadState#transact
/frameworks/native/libs/binder/IPCThreadState.cpp
status_t IPCThreadState::
transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err;
//дЪаэЗЕЛижааЏДјЮФМўУшЪіЗћ
flags |= TF_ACCEPT_FDS;
...
//ЗтзАBC_TRANSACTIONЭЈаХЧыЧѓ
err = writeTransactionData (BC_TRANSACTION,
flags, handle, code, data, NULL);
...
//ЭЌВНorвьВНЃЌетРяЪЧЭЌВНЕїгУ
if ((flags & TF_ONE_WAY) == 0) {
...
if (reply) {
//ߐBinderקƏǀֹBC_TRANSACTION
err = waitForResponse(reply);
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
...
}
...
}else{
err = waitForResponse(NULL, NULL);
}
return err;
} |
ЩЯУцЪзЯШНЋflagsгыTF_ACCEPT_FDSзіЛђВйзїЃЌБэЪОНгЪеЮФМўУшЪіЗћ
жЎКѓЕїгУwriteTransactionDataНЋЪ§ОнЗтзАГЩвЛИіBC_TRANSACTIONУќСюавщ,етРяЪЧЭЌВНЕїгУЧаашвЊЗЕЛиЃЌЫљвджДааЕНЕФЪЧwaitForResponse(reply)ЃЌНгЯТРДЗжБ№РДПДwriteTransactionDataЁЂwaitForResponseЕФЪЕЯж
status_t IPCThreadState::
writeTransactionData (int32_t cmd, uint32_t
binderFlags,
int32_t handle, uint32_t code, const Parcel&
data, status_t* statusBuffer)
{
//ЖдгІФкКЫжавЊЧѓioаЏДјbinder_transaction_dataНсЙЙЬх
binder_transaction_data tr;
tr.target.ptr = 0; /* Don't pass uninitialized
stack data to a remote process */
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = d ata.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
} else if (statusBuffer) {
tr.flags |= TF_STATUS_CODE;
*statusBuffer = err;
tr.data_size = sizeof(status_t);
tr.data.ptr.buffer = reinterpret_cast<uintptr_t>
(statusBuffer);
tr.offsets_size = 0;
tr.data.ptr.offsets = 0;
} else {
return (mLastError = err);
}
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
} |
етРяжївЊЪЧДДНЈвЛИіbinder_transaction_dataЃЌГѕЦфЪМЛЏКѓНЋвЊДЋЪфЕФЪ§ОнаДШыЕНmOutЛКГхЧјжаЃЌзюжеећИіЪ§ОнГЄетбљзг
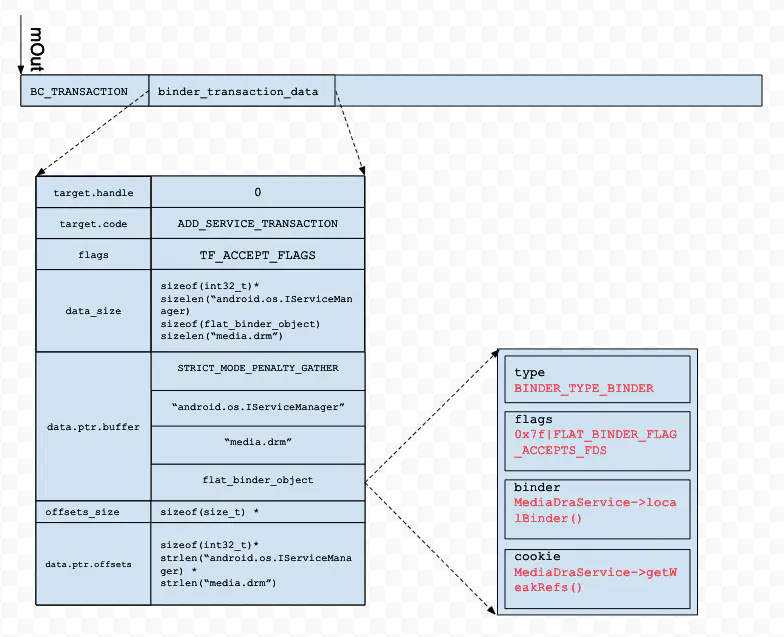
@writeTransactionData|center
Ъ§ОнЗтзАЭъГЩвдКѓЃЌЮвУЧРДПДwaitForResponseЕФЪЕЯж
status_t IPCThreadState::
waitForResponse (Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;
...
//ДгЪфГіЛКГхЧјШЁГіЗЕЛиавщУќСю
cmd = (uint32_t)mIn.readInt32();
...
}
...
return err;
}
|
етРяПЩвдЪЧвЛИіЫРбЛЗЃЌВЛЖЯЕФЭЈЙ§talkWithDriverШЅИњbinderЧ§ЖЏЭЈаХЃЌШЛКѓДгЪфГіЛКГхЧјжаШЁГіЗЕЛиавщШЛКѓДІРэЗЕЛиавщЃЌетРяЯШВЛПДОпЬхЕФавщДІРэЃЌЯШРДПДtalkWithDriverЕФЪЕЯж
//ФЌШЯdoReceive
= true
status_t IPCThreadState:: talkWithDriver(bool
doReceive)
{
...
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >=
mIn.dataSize();
// We don't want to write anything if we are
still reading
// from data left in the input buffer and the
caller
// has requested to read the next data.
const size_t outAvail = (!doReceive || needRead)
? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
...
// Return immediately if there is nothing to
do.
if ((bwr.write_size == 0) && (bwr.read_size
== 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do{
...
//етРяЭЈЙ§ioЯыЧ§ЖЏаДШывЛИіbinder_write_readНсЙЙЬх
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ,
&bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
} while (err == -EINTR);
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else {
mOut.setDataSize(0);
processPostWriteDerefs();
}
}
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
...
return NO_ERROR;
}
return err;
} |
етРяжївЊЭЈЙ§ioПижЦУќСюЯђBinderЧ§ЖЏаДШывЛИіtypeЮЊBINDER_WRITE_READЃЌdataЮЊbinder_write_readЃЌЦфЪфГіЛКГхЧјЮЊЧАУцmOutжааДШыЕФЪ§Он
НгЯТРДЕФВйзїОЭзЊЕНBinderЧ§ЖЏжаНјааСЫЃЌашвЊМЧзЁЃЌClinetНјГЬДЫЪБжДааЕНЕФЮЛжУ
/platform/drivers/staging/
android/binder.c
static long binder_ioctl (struct file *filp,
unsigned int cmd,
unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
...
//етРяИљОнНјГЬевЕНЖдгІЕФthreadЃЌШчЙћУЛевЕНОЭДДНЈвЛИі
thread = binder_get_thread(proc);
...
switch (cmd) {
case BINDER_WRITE_READ:
ret = binder_ioctl_write_read (filp, cmd, arg,
thread);
if (ret)
goto err;
break;
...
}
|
BinderЧ§ЖЏжаЖдгІЕФbinder_ioctl()ЛсЕїгУЃЌжЎКѓЛсДІРэcmdЮЊBINDER_WRITE_READЕФЗжжЇЃЌжЎКѓЛсЕїгУЕНbinder_ioctl_write_read()
static int
binder_ioctl_write_read (struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
//ДгЮФМўУшЪіЗћжаШЁГіНјГЬЕижЗ
struct binder_proc *proc = filp->private_data;
//cmdаХЯЂ
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
//cmdаЃбщ
if (size != sizeof (struct binder_write_read))
{
ret = -EINVAL;
goto out;
}
//ДггУЛЇПеМфжаШЁГіbinder_write_readНсЙЙЬх
if (copy_from_user(&bwr, ubuf, sizeof(bwr)))
{
ret = -EFAULT;
goto out;
}
...
//ЪфГіЛКГхЧјгаЪ§ОнОЭДІРэЪфГіЛКГхЧј
if (bwr.write_size > 0) {
//етРяЪЧеце§ДІРэЪфГіЛКГхЪ§ОнЕФfunc
ret = binder_thread_write(proc, thread,
bwr.write_buffer,
bwr.write_size,
&bwr.write_consumed);
trace_binder_write_done(ret);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
//ЪфШыЛКГхЧјгаЪ§ОнОЭДІРэЪфШыЛКГхЧј
if (bwr.read_size > 0) {
//етРяЪЧеце§ДІРэЪфГіЛКГхЪ§ОнЕФfunc
ret = binder_thread_read (proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
trace_binder_read_done(ret);
//ШчЙћНјГЬtodoЖгРяВЛЮЊПеЃЌЫЕУїгаЪТЮёе§дкДІРэЃЌашвЊЕШД§ДІРэ
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
...
//НЋЪ§ОнcopyЛигУЛЇПеМф
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
{
ret = -EFAULT;
goto out;
}
out:
return ret;
} |
ЧАУцЕїгУПЩжЊЃЌЪфГіЛКГхЧјЪЧгаЪ§ОнЃЌЪфШыЛКГхЧјЪЧУЛгаЪ§ОнЕФЃЌЫљвдЩЯУцЗНЗЈжДааСїГЬгІИУЪЧЃЌЯШЕїгУbinder_thread_writeШЅДІРэЪфГіЛКГхЧј
static int
binder_thread_write (struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *buffer = (void __user *) (uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error
== BR_OK) {
//ИљОнcmdШЁГіЯћЗбЕФЪ§ОнЦЋвЦЕижЗ
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
...
switch (cmd) {
...
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
binder_transaction(proc, thread, &tr, cmd
== BC_REPLY);
break;
...
}
*consumed = ptr - buffer;
}
return 0;
} |
етРяЪЧШЁГіcmdЃЌШЛКѓДІРэBC_TRANSACTIONЪБКђЃЌдйНВbinder_transaction_dataШЁГіЃЌжЎКѓНЛгЩbinder_transactionШЅДІРэ
binder_transactionБШНЯГЄЃЌЦфЪЕжївЊЗжЮЊШ§ИіВПЗж
1.ГѕЪМЛЏФПБъЯпГЬНјГЬ
2.ЗтзАЗЕЛиЪ§Онbinder_transaction_data
3.ЮЊbinder_transaction_dataЗжХфКЯЪЪЕФЯпГЬorНјГЬ
static void
binder_transaction (struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
struct binder_transaction *t;
struct binder_work *tcomplete;
binder_size_t *offp, *off_end;
binder_size_t off_min;
struct binder_proc *target_proc;
struct binder_thread *target_thread = NULL;
struct binder_node *target_node = NULL;
struct list_head *target_list;
wait_queue_head_t *target_wait;
struct binder_transaction *in_reply_to = NULL;
...
uint32_t return_error;
...
//ШчЙћЪЧreplyзпifЗжжЇЃЌЗёдђзпelseЗжжЇЃЌетРязпelse
if (reply) {
...
}else{
//ИљОнОфБњевЖдгІЕФbinder_refЁЂbinder_node
if (tr->target.handle) {
struct binder_ref *ref;
ref = binder_get_ref(proc, tr->target.handle);
...
else{
//handle=0ЃЌдђашвЊевжИЯђservice_managerЕФbinder_node
target_node = binder_context_mgr_node;
...
}
...
//ИљОнbinder_nodeевЕНЖдгІЕФНјГЬbinder_procЃЌетРявВОЭЪЧservice_manager
target_proc = target_node->proc;
...
//ШчЙћЪЧЭЌВНЧыЧѓЃЌГЂЪдбАеввЛИідкЕШД§ЦфЫћЪТЮяжДааЕФЯпГЬЃЌtipsгХЛЏЕїЖШ
if (!(tr->flags & TF_ONE_WAY) &&
thread->transaction_stack) {
struct binder_transaction *tmp;
tmp = thread->transaction_stack;
...
//евЕНвЛИіЕШД§Б№ЕФЪТЮёЭъГЩЕФвРРЕЯпГЬ
while (tmp) {
if (tmp->from && tmp->from->proc
== target_proc)
target_thread = tmp->from;
tmp = tmp->from_parent;
}
}
}
//гаПеЯаЯпГЬОЭЪЧгУПеЯаЯпГЬЕФЕШД§ЖгСаЃЌЗёдђЪЙгУНјГЬЕФЪТЮяЖгСа
if (target_thread) {
e->to_thread = target_thread->pid;
target_list = &target_thread->todo;
target_wait = &target_thread->wait;
} else {
target_list = &target_proc->todo;
target_wait = &target_proc->wait;
}
...
//ДДНЈbinder_transactionНсЙЙЬхЃЌBINDER_WORK_TRANSACTION
//гУгкЯђФПБъНјГЬЗЂЫЭЪ§Он
t = kzalloc(sizeof(*t), GFP_KERNEL);
...
binder_stats_created(BINDER_STAT_TRANSACTION);
...
//ДДНЈbinder_workНсЙЙЬх, BINDER_STAT_TRANSACTION_COMPLETE
//БугкЯђдДНјГЬЗЕЛиЪ§ОнДІРэНсЙћ
tcomplete = kzalloc(sizeof (*tcomplete), GFP_KERNEL);
...
binder_stats_created (BINDER_STAT_TRANSACTION_COMPLETE);
...
//ГѕЪМЛЏt
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;
else
t->from = NULL;
t->sender_euid = task_euid(proc->tsk);
//ФПБъНјГЬ
t->to_proc = target_proc;
//ФПБъЯпГЬ
t->to_thread = target_thread;
//code ADD_SERVICE_TRANSACTION
t->code = tr->code;
//flag = TF_ACCEPT_FLAGS
t->flags = tr->flags;
//гХЯШМЖ
t->priority = task_nice(current);
...
//ЛКГхЧј
t->buffer = binder_alloc_buf(target_proc,
tr->data_size,
tr->offsets_size, !reply && (t->flags
& TF_ONE_WAY));
...
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id;
t->buffer->transaction = t;
t->buffer->target_node = target_node;
...
//ЮЊtЗжХфФкКЫЛКГхЧј
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);
offp = (binder_size_t *)(t->buffer->data
+
ALIGN(tr->data_size, sizeof(void *)));
//Ъ§Онcopy
if (copy_from_user(t->buffer->data, (const
void __user *)(uintptr_t)
tr->data.ptr.buffer, tr->data_size)) {
...
goto err_copy_data_failed;
}
if (copy_from_user(offp, (const void __user
*)(uintptr_t)
tr->data.ptr.offsets, tr->offsets_size))
{
...
goto err_copy_data_failed;
}
...
//ДІРэBinderЧыЧѓЃЌФкКЫжаКмЖрЖМЪЧЕижЗЦ№жЙЮЛжУВйзї
off_end = (void *)offp + tr->offsets_size;
off_min = 0;
for (; offp < off_end; offp++) {
struct flat_binder_object *fp;
...
//ЧАУцДцДЂЕФMediaDrmServiceаХЯЂ
fp = (struct flat_binder_object *) (t->buffer->data
+ *offp);
off_min = *offp + sizeof (struct flat_binder_object);
switch(fp->type){
case BINDER_TYPE_BINDER:
case BINDER_TYPE_WEAK_BINDER: {
struct binder_ref *ref;
struct binder_node *node =
binder_get_node(proc, fp->binder);
//ШчЙћЪЧЪзДЮОЭДДНЈаТЕФbinder_node
if (node == NULL) {
node = binder_new_node (proc, fp->binder,
fp->cookie);
...
//ЩшЖЈЯпГЬгХЯШМЖ
node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
//ЩшжУЪЧЗёНгЪеЮФМўУшЪіЗћ
node->accept_fds = !!(fp->flags &
FLAT_BINDER_FLAG_ACCEPTS_FDS);
}
...
//ШчЙћЪЧЪзДЮОЭДДНЈЖдгІЕФbinder_refЖдЯѓ
ref = binder_get_ref_for_node(target_proc, node);
if (ref == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_get_ref_for_node_failed;
}
//аоИФflat_binder_objec.type
if (fp->type == BINDER_TYPE_BINDER)
fp->type = BINDER_TYPE_HANDLE;
else
fp->type = BINDER_TYPE_WEAK_HANDLE;
//ЩшжУОфБњ
fp->handle = ref->desc;
//діМгbinder_refЕФв§гУМЦЪ§
binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE,
&thread->todo);
...
}break;
...
}
}
//ЗжХфЪТЮёtЕФвЊНјШыФЧИіеЛ
if (reply) {
...
binder_pop_transaction (target_thread, in_reply_to);
} else if (!(t->flags & TF_ONE_WAY))
{
...
t->need_reply = 1;
t->from_parent = thread->transaction_stack;
thread->transaction_stack = t;
} else {
...
if (target_node->has_async_transaction) {
target_list = &target_node->async_todo;
target_wait = NULL;
} else
target_node->has_async_transaction = 1;
}
//НЋbinder_transaction_dataжИеыtЕФРраЭаоИФЮЊBINDER_WORK_TRANSACTION
t->work.type = BINDER_WORK_TRANSACTION;
//ЬэМгЕНtarget_listЖгСаЮВВП
list_add_tail(&t->work.entry, target_list);
//НЋbinder_workжИеыtcomplete.typeжУЮЊ BINDER_WORK_TRANSACTION_COMPLETE
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
list_add_tail (&tcomplete->entry, &thread->todo);
//етРягаСНИіжДааЗжжЇ
//1.ДІРэРраЭЮЊBINDER_WORK_TRANSACTIONЕФ binder_transaction_data
//2.ДІРэРраЭЮЊBINDER_WORK_TRANSACTION_COMPLETE ЕФbinder_work
if (target_wait)
wake_up_interruptible(target_wait);
return;
...
} |
ОЙ§ЩЯУцfuncвдКѓЃЌbinderЧ§ЖЏжаОЭЛсЮЊMediaDrmServiceДДНЈЖдгІЕФbinder_nodeВЂМгШыЕНећИіBinderЪЕЬхЖдЯѓЕФКьКкЪїжаЃЌНгзХЛсЗжБ№ЯђClientНјГЬЁЂServiceManagerЗЂЫЭвЛИіBINDER_WORK_TRANSACTION_COMPLETEЕФbinder_workМАBINDER_WORK_TRANSACTIONЕФbinder_transaction
жСДЫЃЌдДЯпГЬthreadЁЂtarget_procЛђепtarget_threadЛсВЂЗЂЕФШЅжДааИїздtodoЖгСажаЕФШЮЮё
ЯШРДПДдДЯпГЬ,ЛиЕНbinder_ioctl_write_readжаЃЌНгЯТРДвЊДІРэЪфШыЛКГхЧјЃЌЖдгІЕФЕїгУbinder_thread_read
static int
binder_thread_read (struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
void __user *buffer = (void __user *) (uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
...
//ЯпГЬЛНаб
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//МьВщЙЄзїЖгСаЃЌВЂНЋД§ДІРэЯюИГжЕИјw
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread-> todo,
struct binder_work,
entry);
} else if (!list_empty(&proc->todo) &&
wait_for_proc_work) {
w = list_first_entry (&proc->todo, struct
binder_work,
entry);
} else {
/* no data added */
if (ptr - buffer == 4 &&
!(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN))
goto retry;
break;
}
switch (w->type) {
...
case BINDER_WORK_TRANSACTION_COMPLETE: {
cmd = BR_TRANSACTION_COMPLETE;
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
...
//ЩОГ§binder_workЃЌВЂЪЭЗХзЪдД
list_del(&w->entry);
kfree(w);
binder_stats_deleted (BINDER_STAT_TRANSACTION_COMPLETE);
} break;
}
done:
*consumed = ptr - buffer;
...
return 0;
} |
етРяЗЕЛивЛИіBR_TRANSACTION_COMPLETEавщЃЌжЎКѓЛсОЙ§вЛаЉСаЕїгУЛсЛиЕНIPCThreadState#waitForResponseжа
status_t IPCThreadState::waitForResponse
(Parcel *reply, status_t *acquireResult)
{
...
uint32_t cmd;
int32_t err;
while (1) {
...
cmd = (uint32_t)mIn.readInt32();
...
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
}
...
}
finish:
...
return error;
} |
IPCThreadState::waitForResponseЖдгкBR_TRANSACTION_COMPLETEДІРэБШНЯМђЕЅЃЌОЭжБНгЗЕЛиСЫ
ЮвУЧРДПДЯТtarget_procМДServiceManagerЪЧдѕУДНгЪеДІРэBINDER_WORK_TRANSACTIONРраЭЕФbinder_transactionЕФЃЌМйЩшServiceManagerжЎЧАУЛгаЭЈаХЃЌФЧУДЫћОЭдкBinderЧ§ЖЏжавЛжБЕШД§ЪТЮёЕФЕНРДЃЌЯждкгаЪТЮёСЫФЧУДЖдгІЕФОЭЛсЕїгУbinder_read_thread
static int
binder_thread_read (struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
void __user *buffer = (void __user *) (uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
...
//ЯпГЬЛНаб
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//МьВщЙЄзїЖгСаЃЌВЂНЋД§ДІРэЯюИГжЕИјw
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread->todo, struct
binder_work,
entry);
} else if (!list_empty (&proc->todo) &&
wait_for_proc_work) {
w = list_first_entry (&proc->todo, struct
binder_work,
entry);
} else {
/* no data added */
if (ptr - buffer == 4 &&
!(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN))
goto retry;
break;
}
...
switch (w->type) {
case BINDER_WORK_TRANSACTION: {
t = container_of (w, struct binder_transaction,
work);
} break;
...
}
//ЗЕЛиавщЕФДІРэЃЌЯждкtarget_nodeжИЯђЕФЪЧbinder_context_mgr_node
if (t->buffer->target_node) {
struct binder_node *target_node = t->buffer->target_node;
tr.target.ptr = target_node->ptr;
tr.cookie = target_node->cookie;
//БЃДцдБОЕФЯпГЬгХЯШМЖЃЌБугкКѓајЛжИД
t->saved_priority = task_nice(current);
//аоИФbinderЧ§ЖЏжаЖдгІprocЕФЯпГЬгХЯШМЖЃЈФЃФтClientНјГЬЕФЯпГЬгХЯШМЖЃЉ
if (t->priority < target_node->min_priority
&&
!(t->flags & TF_ONE_WAY))
binder_set_nice(t->priority);
else if (!(t->flags & TF_ONE_WAY) ||
t->saved_priority > target_node->min_priority)
binder_set_nice(target_node->min_priority);
cmd = BR_TRANSACTION;
} else {
...
}
//ПНБДcodeгыflagsЃЌ
//зЂВсЗўЮёЙ§ГЬжаетРяЪЧ ADD_SERVICE_TRANSACTIONЁЂTF_ACCEPT_FDS
tr.code = t->code;
tr.flags = t->flags;
if (t->from) {
struct task_struct *sender = t->from->proc->tsk;
tr.sender_pid = task_tgid_nr_ns(sender,
task_active_pid_ns(current));
} else {
...
}
//BinderЧ§ЖЏГЬађЗжХфИјНјГЬЕФФкКЫЛКГхЧјЭЌЪБЃЌ
//гГЩфСЫгУЛЇЕФФкКЫЕижЗЁЂгУЛЇПеМфЕижЗ
tr.data_size = t->buffer->data_size;
tr.offsets_size = t->buffer->offsets_size;
tr.data.ptr.buffer = (binder_uintptr_t)(
(uintptr_t)t->buffer->data +
proc->user_buffer_offset);
//жБНгВйзїoffsets
tr.data.ptr.offsets = tr.data.ptr.buffer +
ALIGN(t->buffer->data_size,
sizeof(void *));
//ЬсЙЉвЛИіЗЕЛиавщЪ§ОнЕФЛКГхЧј
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
if (copy_to_user(ptr, &tr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
...
list_del(&t->work.entry);
t->buffer->allow_user_free = 1;
//cmd = BR_TRANSACTION && ВЛЪЧе§дкДІРэвьВНЭЈаХЧыЧѓ
//ОЭашвЊЕШД§ИУЭЌВННјГЬЭЈаХЭъвдКѓдйНјааЯТвЛВНЕФВйзї
if (cmd == BR_TRANSACTION && !(t->flags
& TF_ONE_WAY)) {
t->to_parent = thread->transaction_stack;
t->to_thread = thread;
thread->transaction_stack = t;
} else {
t->buffer->transaction = NULL;
kfree(t);
binder_stats_deleted(BINDER_STAT_TRANSACTION);
}
break;
}
...
return 0
} |
етРяЪЕМЪЩЯЪЧЗЕЛивЛИіBR_TRANSACTIONавщЃЌВЂЧвНЋжЎЧАЭЈЙ§binder_transactionДЋЪфЕФЪ§ОнЗтзАЕНbinder_transaction_dataжаЃЌгЩгкдкservice_managerЦєЖЏжаЃЌНјШыbinder_loopЪБКђжИЖЈЕФКЏЪ§в§гУЮЊsvcmgr_handler,binder_loopжаЛсбЛЗЭЈЙ§ioctlПижЦУќСюШЅгыФкКЫНЛЛЅЪ§ОнЃЌbinder_parseгУгкНтЮіЪ§Он
platform/frameworks/native/cmds
/servicemanager/binder.c
int binder_parse (struct binder_state *bs, struct
binder_io *bio,
uintptr_t ptr, size_t size, binder_handler func)
{
int r = 1;
uintptr_t end = ptr + (uintptr_t) size;
while (ptr < end) {
uint32_t cmd = *(uint32_t *) ptr;
ptr += sizeof(uint32_t);
...
case BR_TRANSACTION: {
struct binder_transaction_data *txn =
(struct binder_transaction_data *) ptr;
...
if (func) {
unsigned rdata[256/4];
struct binder_io msg;
struct binder_io reply;
int res;
bio_init(&reply, rdata, sizeof(rdata), 4);
bio_init_from_txn(&msg, txn);
//ЕїгУsvcmgr_handlerШЅДІРэ
res = func(bs, txn, &msg, &reply);
if (txn->flags & TF_ONE_WAY) {
binder_free_buffer(bs, txn->data.ptr.buffer);
} else {
//ЗЕЛизЂВсЕФНсЙћИјbinderЧ§ЖЏ
binder_send_reply(bs, &reply,
txn->data.ptr.buffer, res);
}
}
break;
}
}
|
етЦфжагаШ§ИіНсЙЙЬхbinder_ioжївЊДцДЂЪ§ОнДЋЪфЃЌЖЈвхШчЯТ:
struct binder_io
{
char *data; /* pointer to read/write from */
binder_size_t *offs; /* array of offsets */
size_t data_avail; /* bytes available in data
buffer */
size_t offs_avail; /* entries available in offsets
array */
char *data0; /* start of data buffer */
binder_size_t *offs0; /* start of offsets buffer
*/
uint32_t flags;
uint32_t unused;
}; |
binder_parseжаЯШЭЈЙ§bio_initШЅГѕЪМЛЏreplyЃЌШЛКѓЭЈЙ§bio_init_from_txnШЅГѕЪМЛЏmsgЃЌОЭЪЧЪ§ОнЖдЦыЕФЙ§ГЬМАflagЩшжУЃЌетРяВЛдйЯИЪі
ЮвУЧжиЕуЙизЂfunc,вВОЭЪЧsvcmgr_handlerЃЌЯШРДЛиЙЫЧАУцЪ§ОнФЧеХЭМ
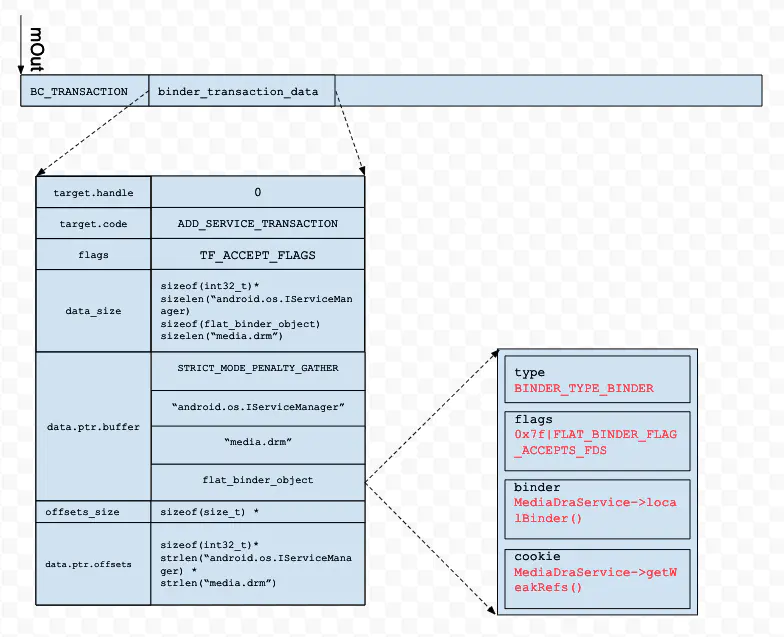
@writeTransactionData|center
НгЯТРДдйРДПДsvvmgr_handlerЕФЪЕЯж
uint16_t svcmgr_id[]
= {
'a','n','d','r','o', 'i','d','.','o','s','.',
'I','S','e', 'r','v','i', 'c','e','M', 'a','n','a','g','e','r'
};
...
int svcmgr_handler(struct binder_state *bs,
struct binder_transaction_data *txn,
struct binder_io *msg,
struct binder_io *reply)
{
struct svcinfo *si;
uint16_t *s;
size_t len;
uint32_t handle;
uint32_t strict_policy;
int allow_isolated;
...
strict_policy = bio_get_uint32(msg);
s = bio_get_string16(msg, &len);
...
//svcmgr_idаЃбщ,ЪЧЗёЮЊЁАandroid.os.IServiceManagerЁБ
if ((len != (sizeof(svcmgr_id) / 2)) ||
memcmp(svcmgr_id, s, sizeof(svcmgr_id))) {
fprintf(stderr,"invalid id %s\n",
str8(s, len));
return -1;
}
...
switch(txn->code) {
...
//УЖОйжЕЖдгІADD_SERVICE_TRANSACTION
case SVC_MGR_ADD_SERVICE:
s = bio_get_string16(msg, &len);
if (s == NULL) {
return -1;
}
//ШЁГіbinder_в§гУЖдЯѓЕФОфБњжЕ
handle = bio_get_ref(msg);
allow_isolated = bio_get_uint32(msg) ? 1 : 0;
dumpsys_priority = bio_get_uint32(msg);
if (do_add_service(bs, s, len, handle,
txn->sender_euid, allow_isolated, dumpsys_priority,
txn->sender_pid))
return -1;
break;
}
...
bio_put_uint32(reply, 0);
return 0;
}
|
ДгmsgжаШЁГіЖдгІЕФServiceЕФhandleЁЂnameЃЌШЛКѓЕїгУdo_add__serviceШЅжДааКѓајЕФВйзї
ПДdo_add_serviceжЎЧАЮвУЧЯШРДПДвЛИіНсЙЙЬхsvcinfo
struct svcinfo
{
//жИЯђЯТвЛИів§гУ
struct svcinfo *next;
//ОфБњжЕ
uint32_t handle;
//ЫРЭіДњРэЭЈжЊ
struct binder_death death;
int allow_isolated;
uint32_t dumpsys_priority;
size_t len;
//ЗўЮёУћГЦ
uint16_t name[0];
}; |
дкServiceManagerжаУПвЛИіЗўЮёЖдгІвЛИіsvcinfoНсЙЙЬх
НгЯТРДЮвУЧПДdo_add_serviceЕФЪЕЯж
int do_add_service
(struct binder_state *bs, const uint16_t *s,
size_t len, uint32_t handle, uid_t uid, int
allow_isolated,
uint32_t dumpsys_priority, pid_t spid) {
//ДцДЂвЊзЂВсЕФЗўЮёаХЯЂ
struct svcinfo *si;
...
//МьВщШЈЯо
if (!svc_can_register(s, len, spid, uid)) {
ALOGE("add_service('%s',%x) uid=%d - PERMISSION
DENIED\n",
str8(s, len), handle, uid);
return -1;
}
/ЯШШЅеветИіЗўЮё
si = find_svc(s, len);
if (si) {
if (si->handle) {
...
svcinfo_death(bs, si);
}
si->handle = handle;
} else {
//зЂВсЗўЮё
si = malloc(sizeof(*si) + (len + 1) * sizeof(uint16_t));
...
si->handle = handle;
si->len = len;
memcpy(si->name, s, (len + 1) * sizeof(uint16_t));
si->name[len] = '\0';
si->death.func = (void*) svcinfo_death;
si->death.ptr = si;
si->allow_isolated = allow_isolated;
si->dumpsys_priority = dumpsys_priority;
//АѓЖЈЕНsvclistжа
si->next = svclist;
svclist = si;
}
//діМгв§гУЃЌБмУтБЛЯњЛй
binder_acquire(bs, handle);
//АѓЖЈЫРЭіЭЈжЊ
binder_link_to_death (bs, handle, &si->death);
return 0;
} |
етРяЯШМьВщServiceЪЧЗёгазЂВсШЈЯо(ВЛЭЌАцБОФкКЫМгЙЬЕїгУВЛЭЌЃЌИааЫШЄПЩвдВщПДselinux)ЃЌШЛКѓЯШШЅГЂЪдВщеветИіЗўЮёДцдкВЛЃЌШчЙћВЛДцдкОЭЗжХфвЛИіаТЕФstruct
svcinfoЃЌВЂНЋЦфЙвЕНsvclistжаЃЌгЩДЫПЩМћдкservice_managerжаЪЧЮЌЛЄетвЛИіЫљгаServiceзщМўаХЯЂЕФsvclistЕФ
ЛиЕНbinder_parseжа,НгЯТРДЛсЕїгУbinder_send_replyЯђBinderЧ§ЖЏЗЂЫЭвЛИіBC_REPLY
|
void binder_send_reply (struct binder_state *bs,
struct binder_io *reply,
binder_uintptr_t buffer_to_free,
int status)
{
//ФфУћНсЙЙЬх
struct {
uint32_t cmd_free;
binder_uintptr_t buffer;
uint32_t cmd_reply;
struct binder_transaction_data txn;
} __attribute__((packed)) data;
data.cmd_free = BC_FREE_BUFFER;
data.buffer = buffer_to_free;
data.cmd_reply = BC_REPLY;
data.txn.target.ptr = 0;
data.txn.cookie = 0;
data.txn.code = 0;
if (status) {
//ЭЈаХжаВњЩњСЫДэЮѓ
data.txn.flags = TF_STATUS_CODE;
data.txn.data_size = sizeof(int);
data.txn.offsets_size = 0;
data.txn.data.ptr.buffer = (uintptr_t)&status;
data.txn.data.ptr.offsets = 0;
} else {
//ГЩЙІДІРэЕФвЛДЮЭЈаХЧыЧѓ
data.txn.flags = 0;
data.txn.data_size = reply->data - reply->data0;
data.txn.offsets_size = ((char*) reply->offs)
- ((char*) reply->offs0);
data.txn.data.ptr.buffer = (uintptr_t)reply->data0;
data.txn.data.ptr.offsets = (uintptr_t)reply->offs0;
}
//ЯђBinderЧ§ЖЏаДШыЪ§Он
binder_write(bs, &data, sizeof(data));
} |
етРяЛсНЋНјГЬЭЈаХНсЙћаДШыЕНФфУћstruct dataжаЃЌШЛКѓЕїгУbinder_writeШЅЯђФкКЫаДШыBC_FREE_BUFFER\BC_REPLYУќСюавщ
| int binder_write (struct
binder_state *bs, void *data, size_t len)
{
struct binder_write_read bwr;
int res;
bwr.write_size = len;
bwr.write_consumed = 0;
bwr.write_buffer = (uintptr_t) data;
bwr.read_size = 0;
bwr.read_consumed = 0;
bwr.read_buffer = 0;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) {
fprintf (stderr,"binder_write: ioctl failed
(%s)\n",
strerror(errno));
}
return res;
} |
binder_writeЪЕМЪЩЯЛЙЪЧЭЈЙ§IOПижЦУќСюаДШывЛИіbinder_write_readНсЙЙЬхЃЌзЂвтетИіНсЙЙЬхЪфШыЛКГхЧјЪЧУЛгаЪ§ОнЕФЃЌвВОЭЪЧЫЕВЛашвЊДІРэЗЕЛиавщ
ТдЙ§ИїжжЕїгУЮвУЧРДПДФкКЫжаbinder_thread_writeЖдгкBC_FREE_BUFFER\BC_REPLYЕФДІРэ
| platform/drivers/staging/android/binder.c
static int binder_thread_write (struct binder_proc
*proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *buffer = (void __user *) (uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread-> return_error
== BR_OK) {
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
...
switch (cmd) {
...
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
binder_transaction(proc, thread, &tr, cmd
== BC_REPLY);
break;
}
...
} |
BC_FREE_BUFFERжївЊЪЧзівЛаЉзЪдДЪЭЗХЕФВйзїЃЌИааЫШЄПЩвдздМКПДетРяВЛдйЯИПД
жиЕуПДBC_REPLY,ВщПДbinder_transactionЕФДІРэ
| static void binder_transaction(struct
binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
...
struct binder_transaction *t;
struct binder_work *tcomplete;
binder_size_t *offp, *off_end;
binder_size_t off_min;
struct binder_proc *target_proc;
struct binder_thread *target_thread = NULL;
struct binder_node *target_node = NULL;
struct list_head *target_list;
wait_queue_head_t *target_wait;
struct binder_transaction *in_reply_to = NULL;
struct binder_transaction_log_entry *e;
uint32_t return_error;
...
if (reply) {
//бАевЧыЧѓЭЈаХЕФthread
//ДгжЎЧАЕФthreadжаШЁГіЭЈаХЕФbinder_transaction_data
in_reply_to = thread->transaction_stack;
if (in_reply_to == NULL) {
...
return_error = BR_FAILED_REPLY;
goto err_empty_call_stack;
}
//ЛжИДЯпГЬгХЯШМЖ
binder_set_nice(in_reply_to->saved_priority);
if (in_reply_to->to_thread != thread) {
...
return_error = BR_FAILED_REPLY;
in_reply_to = NULL;
goto err_bad_call_stack;
}
thread->transaction_stack = in_reply_to->to_parent;
target_thread = in_reply_to->from;
if (target_thread == NULL) {
return_error = BR_DEAD_REPLY;
goto err_dead_binder;
}
if (target_thread->transaction_stack != in_reply_to)
{
...
return_error = BR_FAILED_REPLY;
in_reply_to = NULL;
target_thread = NULL;
goto err_dead_binder;
}
//ФПБъНјГЬ
target_proc = target_thread->proc;
}else{
...
}
//гаПеЯаЯпГЬОЭЪЧгУПеМфЯпГЬЕФЕШД§ЖгСаЃЌЗёдђЪЙгУНјГЬЕФ
if (target_thread) {
...
target_list = &target_thread->todo;
target_wait = &target_thread->wait;
} else {
...
}
...
//ДДНЈbinder_transactionНсЙЙЬхЃЌBINDER_WORK_TRANSACTION
t = kzalloc(sizeof(*t), GFP_KERNEL);
...
//ДДНЈbinder_workНсЙЙЬх,BINDER_STAT_TRANSACTION_COMPLETE
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
...
//ЗжХфЪТЮёtЕФвЊНјШыФЧИіеЛ
if (reply) {
BUG_ON(t->buffer->async_transaction !=
0);
//НЋЪТЮёЕЏГіtodoеЛ
binder_pop_transaction(target_thread, in_reply_to);
} else if (!(t->flags & TF_ONE_WAY))
{
...
}else{
...
}
//НЋbinder_transaction_dataжИеыtЕФРраЭаоИФЮЊBINDER_WORK_TRANSACTION
t->work.type = BINDER_WORK_TRANSACTION;
//ЬэМгЕНtarget_listЖгСаЮВВП
list_add_tail(&t->work.entry, target_list);
//НЋbinder_workжИеыtcomplete.typeжУЮЊBINDER_WORK_TRANSACTION_COMPLETE
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
list_add_tail(&tcomplete->entry, &thread->todo);
//етРягаСНИіжДааЗжжЇ
//1.ДІРэРраЭЮЊBINDER_WORK_TRANSACTIONЕФbinder_transaction_data
//2.ДІРэРраЭЮЊBINDER_WORK_TRANSACTION_COMPLETEЕФbinder_work
if (target_wait)
wake_up_interruptible(target_wait);
return;
...
}
|
етРяИњжЛАЎШЅФФЕїгУВЛЭЌЕФЕиЗНдкгкзпЕФЪЧifЗжжЇЃЌашвЊВщевЕНжЎЧАЭЈаХЕФФПБъЯпГЬМАНјГЬЃЌШЛКѓНЋЩЯДЮЭЈаХЕФbinder_transactionЕЏеЛЃЌШЛКѓЛиЯыжЎЧАЭЈаХЕФНјГЬЗЂЫЭвЛИіtypeЮЊBINDER_WORK_TRANSACTIONЕФbinder_workЃЌжЎЧАФЧИіНјГЬЖдгІЕФbinder_thread_readДІРэШчЯТ:
| static int binder_thread_read(struct
binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
...
//ЯпГЬЛНаб
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//МьВщЙЄзїЖгСаЃЌВЂНЋД§ДІРэЯюИГжЕИјw
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread->todo, struct
binder_work,
entry);
} else if (!list_empty(&proc->todo) &&
wait_for_proc_work) {
w = list_first_entry(&proc->todo, struct
binder_work,
entry);
} else {
...
}
...
switch (w->type) {
case BINDER_WORK_TRANSACTION: {
t = container_of(w, struct binder_transaction,
work);
} break;
...
}
//ЗЕЛиавщЕФДІРэЃЌЯждкtarget_nodeжИЯђЕФЪЧbinder_context_mgr_node
if (t->buffer->target_node) {
...
}else{
tr.target.ptr = 0;
tr.cookie = 0;
cmd = BR_REPLY;
}
//BinderЧ§ЖЏГЬађЗжХфИјНјГЬЕФФкКЫЛКГхЧјЭЌЪБЃЌгГЩфСЫгУЛЇЕФФкКЫЕижЗЁЂгУЛЇПеМфЕижЗ
tr.data_size = t->buffer->data_size;
tr.offsets_size = t->buffer->offsets_size;
tr.data.ptr.buffer = (binder_uintptr_t)(
(uintptr_t)t->buffer->data +
proc->user_buffer_offset);
//жБНгВйзїoffsets
tr.data.ptr.offsets = tr.data.ptr.buffer +
ALIGN(t->buffer->data_size,
sizeof(void *));
//ЬсЙЉвЛИіЗЕЛиавщЪ§ОнЕФЛКГхЧј
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
if (copy_to_user(ptr, &tr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
...
//cmd = BR_TRANSACTION && ВЛЪЧе§дкДІРэвьВНЭЈаХЧыЧѓ
//ОЭашвЊЕШД§ИУЭЌВННјГЬЭЈаХЭъвдКѓдйНјааЯТвЛВНЕФВйзї
if (cmd == BR_TRANSACTION && !(t->flags
& TF_ONE_WAY)) {
...
} else {
t->buffer->transaction = NULL;
kfree(t);
binder_stats_deleted(BINDER_STAT_TRANSACTION);
}
break;
}
...
} |
етРяОЭЛсЗтзАвЛИіBR_REPLYЗЕЛиавщЃЌШЛКѓЗЕЛиЕНIPCThreadState::waitForResponseжа
НгЯТРДПДIPCThreadState::waitForResponseЖдгкBR_REPLYЕФДІРэ
| status_t IPCThreadState::waitForResponse(Parcel
*reply, status_t *acquireResult)
{
uint32_t cmd;
...
while (1) {
...
cmd = (uint32_t)mIn.readInt32();
...
switch (cmd) {
case BR_REPLY:
{
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
...
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
//жижУParcelЖдЯѓФкВПЪ§ОнЛКГхЧјЃЌВЂжИЖЈЪЭЗХКЏЪ§ЮЊfreeBuffer
reply->ipcSetDataReference(
reinterpret_cast
<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast
<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t),
freeBuffer, this);
} else {
...
} else {
...
}
}
goto finish;
...
}
}
...
}
|
ЪЕМЪЩЯЛсЕїгУreply->ipcSetDataReferenceШЅжижУЪ§ОнЛКГхЧјЃЌетРяВЛдйЯИЪіЃЌећИіServiceзЂВсОЭДѓжТЭъГЩСЫЃЌКѓајЛЙгаBinderЯпГЬЕФЦєЖЏИааЫШЄПЩвдздааВщПД
ServiceManagerВщевЗўЮё
@ServiceЕФВщевСїГЬ|center
ЭъећЕФЭЈаХСїГЬ
@ЭъећЕФЭЈаХСїГЬ
|