| 编辑推荐: |
本文主要介绍了遥控泊车功能(Remote Parking Assist)相关内容。
希望对您的学习有所帮助。
本文来自于微信公众号汽车电子与软件,由火龙果软件Linda编辑、推荐。 |
|
随着城市车辆保有量的持续攀升,车位紧张、空间狭小成为普遍难题,传统人工泊车常因视野受限、空间压迫或环境复杂而困难重重,尤其在地库、斜车位、窄车位等场景中更是挑战重重。为此,自动化、智能化泊车技术应运而生,其中遥控泊车系统(RPA,
Remote Parking Assist)以其“人在车外、车自动泊”的便捷体验,成为智能驾驶技术的重要应用之一。
遥控泊车功能使驾驶员无需坐在车内,即可通过手机App或钥匙在车外控制车辆泊入泊出,大幅提升泊车便利性、安全性和尊贵体验,正逐步走向量产普及阶段。
#01
遥控泊车系统介绍
遥控泊车功能(Remote Parking Assist,简称RPA)是一种高级驾驶辅助功能(ADAS),允许用户在车外通过遥控钥匙或智能手机App,控制车辆自动完成泊车入位或驶离车位的操作。该功能特别适用于空间狭窄、驾驶员上下车受限的场景,提高停车便捷性与安全性。
1.1 关键系统组成
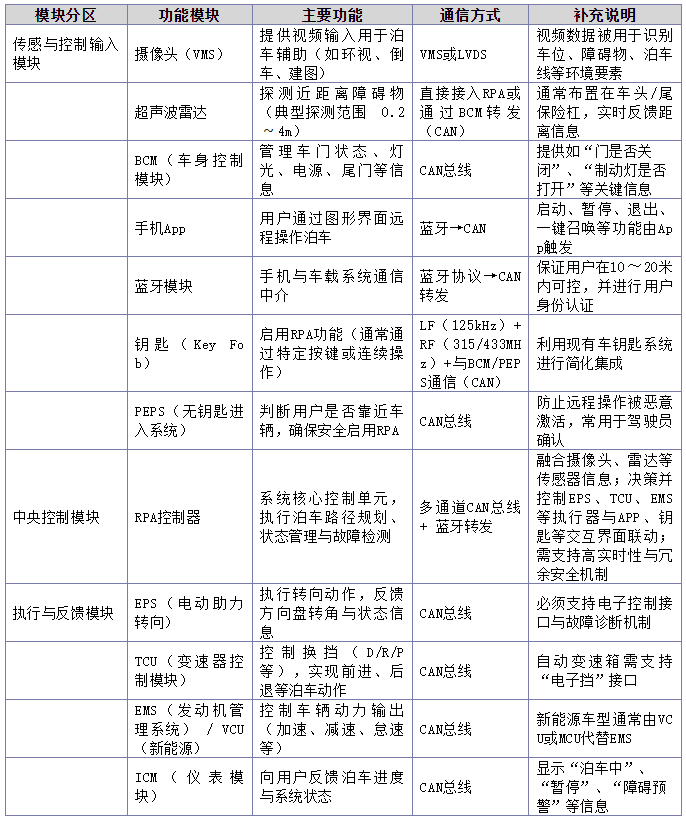
RPA系统由三大模块组成:传感与控制输入模块、RPA控制器、车辆执行与反馈模块:
传感输入端:侧重环境感知、安全状态判定,信息主要通过CAN总线传入RPA控制器;
超声波雷达:用于近距离障碍物探测;
环视摄像头:实现360°可视泊车环境;
毫米波雷达/激光雷达(部分高阶车型):增强空间感知精度;
IMU(惯性测量单元):用于判断车身姿态、转向动态。
RPA控制器:核心计算与决策中心,融合感知、决策、人机交互、通信、控制等功能。
自动泊车算法模块;
路径规划与轨迹跟踪模块;
控制指令下发至转向、制动、电机、换挡等执行器。
执行反馈端:完成实际控制动作并回传执行状态,确保系统闭环与安全性;
电动助力转向(EPS)、电子驻车(EPB)、线控刹车/加速、线控换挡系统等;
实现对车辆低速精准控制。
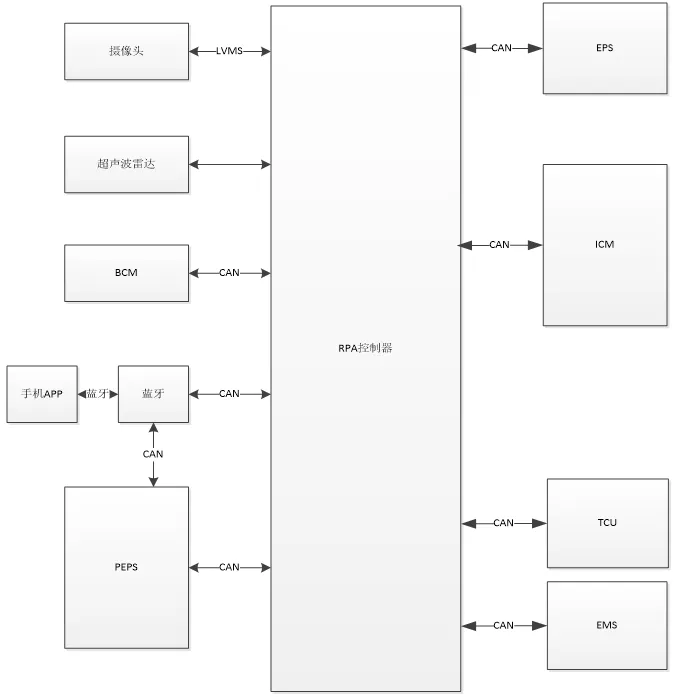
通信协议以CAN总线为主,部分摄像头使用LVDS(或VMS),实现高速图像数据传输:

1.2 遥控泊车控制方式
遥控泊车系统核心特性之一是用户可在车外通过远程终端控制车辆自动泊入车位,遥控泊车系统(Remote
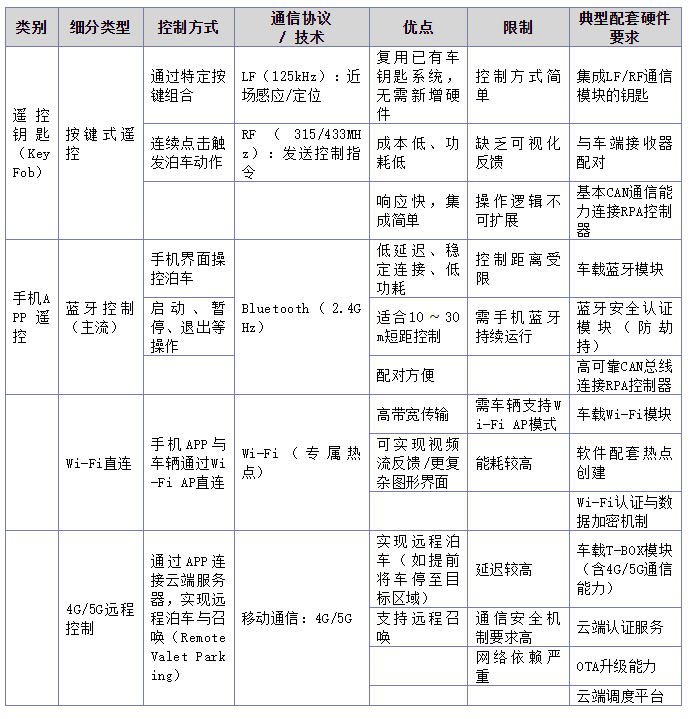
Parking Assist,RPA)通常支持两种主流的控制终端:遥控钥匙(Key Fob)和手机APP。两者分别基于不同的通信机制,与整车系统实现指令交互:
1. 遥控钥匙控制方式
遥控钥匙主要通过现有的车载低频(LF)和射频(RF)通道与整车进行通信,具体包括:
LF(Low Frequency)通信:工作频率一般为125kHz,用于实现车辆近场定位和钥匙识别唤醒功能。
RF(Radio Frequency)通信:常见频率为315MHz或433MHz,用于发送远程控制指令,如启动遥控泊车流程。
具备专用遥控泊车按钮,用户需在车辆周围(通常10米内)按住按钮持续控制;
支持启动车辆并执行前进/后退、微调方向、自动泊车操作;
常见于奔驰、宝马等高端车型中,遥控信号稳定性强。

该方案无需增加额外通信通道或硬件,具备集成度高、响应快速、功耗低等优点,适用于传统车辆电子架构。但由于功能受限,通常仅支持基本的泊车启动、暂停、退出等操作,缺乏可视化反馈与高级控制逻辑扩展能力。
2. 手机APP控制方式
手机APP作为更灵活、智能的遥控终端,正逐渐成为遥控泊车系统的主流控制方案。APP可通过以下三种通信方式与车载系统连接:
通过蓝牙或4G/5G车载通信模块连接车辆;
可实时显示车辆泊车路径、状态信息;
支持触控滑动或虚拟按键操作,部分车型支持语音控制;
用户需保持与车辆的蓝牙连接或网络通信畅通。
蓝牙(Bluetooth):目前最常见的短距离通信方式,通常控制距离为10~30米。手机与车载蓝牙模块配对后,能够低延迟地发送泊车指令,具有功耗低、连接稳定、部署成本低等优点;
Wi-Fi直连:适用于需要更高带宽传输的场景,如视频画面反馈或地图渲染。车端需支持创建专属AP(Access
Point)模式,与APP建立一对一的数据链路。
4G/5G蜂窝通信:实现真正意义上的远程泊车控制(Remote Valet Parking),用户可在远离车辆的情况下完成泊车。该方式通常应用于高级别自动驾驶系统,需配套T-BOX、云端服务与安全验证体系,但也面临通信延迟、网络覆盖与数据安全等挑战。

通过手机APP遥控,用户可在界面中实现包括泊车路径显示、障碍物预警、泊车模式选择、一键召唤、车位记忆与自动回退等功能,显著提升交互体验与系统智能化水平。同时,APP平台支持OTA在线更新,便于后续功能扩展与持续优化。
RPA系统不仅提升智能化体验,更在实际使用中带来显著便利,具体优点如下:
< 
#02状态机及典型用例介绍
2.1 状态机介绍
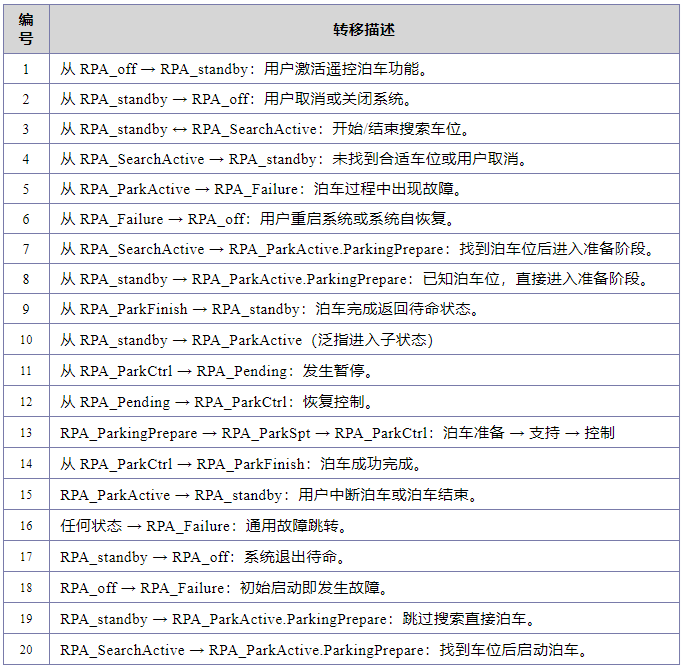
如图展示了遥控泊车系统(RPA,Remote Parking Assist)的状态机模型(State
Machine Model),具体描述了系统在不同状态之间如何转换,以实现完整的遥控泊车过程。
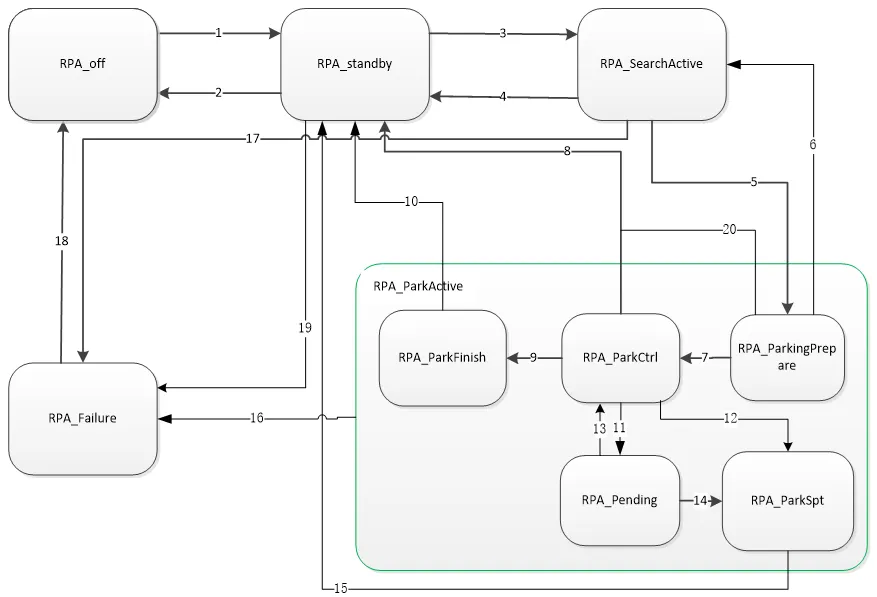
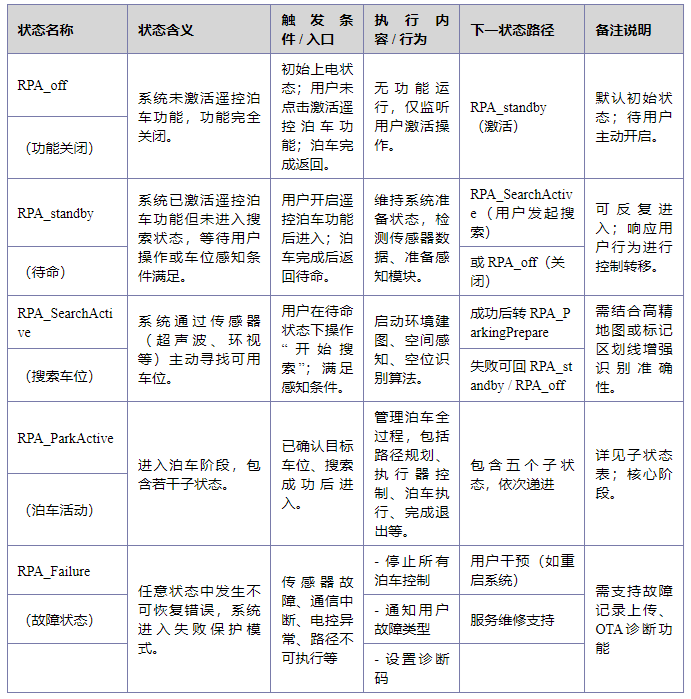
该状态机主要包括以下五个主状态:
RPA_off(关闭状态)
RPA_standby(待命状态)
RPA_SearchActive(搜索泊车位状态)
RPA_ParkActive(泊车活动状态,包含子状态)
RPA_Failure(故障状态)
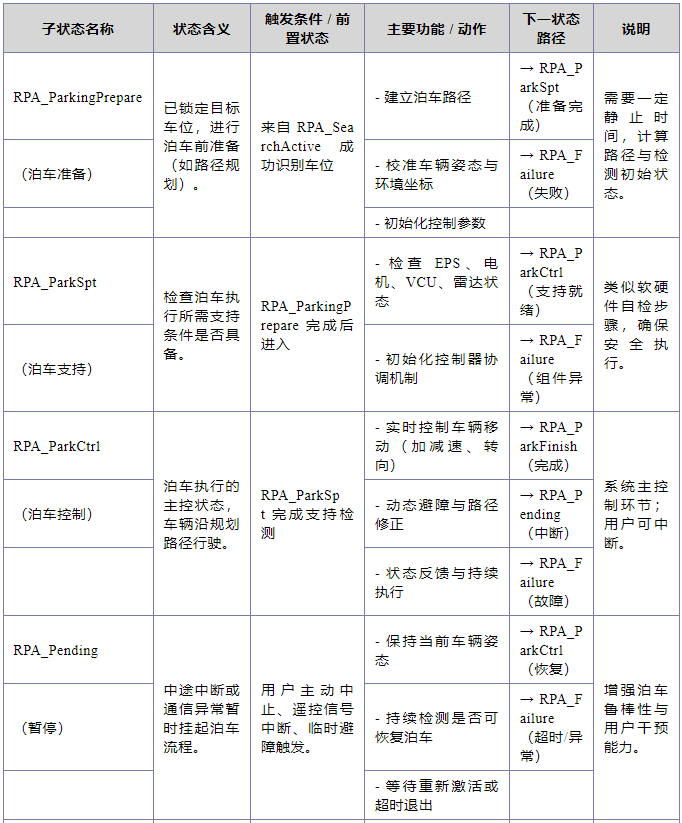
其中RPA_ParkActive包含五个子状态,用绿色边框包裹:
RPA_ParkingPrepare(泊车准备)
RPA_ParkSpt(泊车支持)
RPA_ParkCtrl(泊车控制)
RPA_Pending(暂停状态)
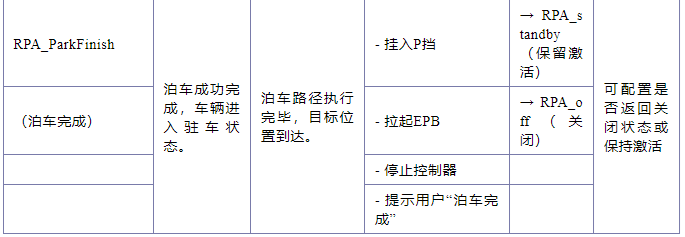
RPA_ParkFinish(泊车完成)
状态转移说明
2.2 Typical Use Cases典型用例
遥控泊车使用场景通常如下:
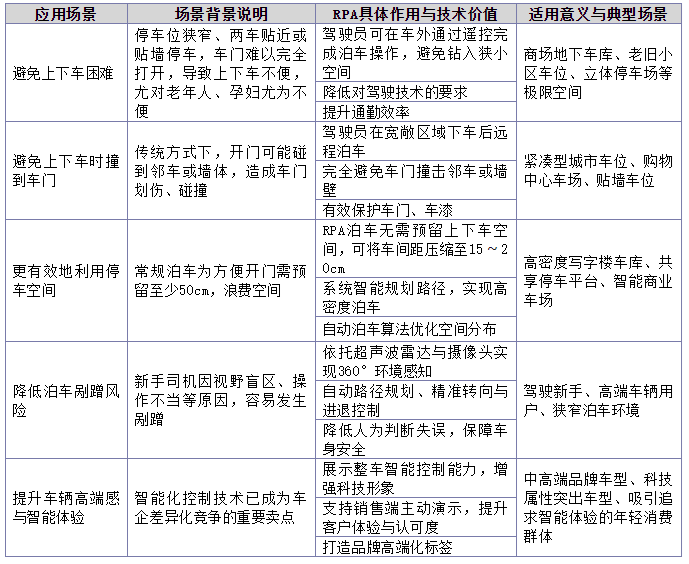
在狭小地库或紧邻柱体的车位中,由于车门开启空间有限,驾驶员往往难以正常上下车。此时,遥控泊车功能可让用户在车外完成泊车操作,轻松应对空间受限的停车难题。

当车辆两侧被邻车紧贴停放时,开启车门容易发生刮蹭,既影响出行也可能损伤车漆。通过遥控泊车,车主可提前下车,再控制车辆完成泊入,避免车门与邻车接触,有效降低剐蹭风险。

在高端住宅区或写字楼地下车库等场所,遥控泊车不仅提升了泊车便利性,更展现出智能科技带来的尊贵感,让用户在日常用车中感受到更高品质的智能体验。

在自动取车或召唤车辆的场景下,用户可在指定位置一键唤车,车辆自动驶出车位前往用户所在位置,省去步行至车位的麻烦,进一步提升用车效率和便利性。

如下为典型用例介绍:
垂直遥控泊入
在垂直车位中,用户启用系统后确认目标车位,挂P挡、拉EPB后下车,在车外通过App或钥匙遥控指令完成泊入。适用于写字楼、住宅小区常见的正向停车位。
水平遥控泊入
水平(平行)车位泊入要求系统具备较强的轨迹规划与车位识别能力,流程同上,适用于城市道路沿线或狭小地库边侧车位。
斜车位遥控泊入
系统需识别不规则角度的车位并计算轨迹,应用较多于商场或复合式停车场。
遥控泊出(垂直/水平/斜)
当车辆被困于两车之间或车主难以进车时,RPA系统可在车外遥控指令下自动驶出车位,提升日常使用灵活性。


#03
总 结
遥控泊车作为智能驾驶的重要组成部分,正在改变用户泊车习惯,让泊车不再是令人头疼的技术活。它不仅提升了车辆使用的便利性,更代表着智能交通发展的关键一步。随着技术不断演进,未来RPA功能将在更多车型中实现普及,带来更安全、智能、便捷的泊车体验。 | 






 订阅
订阅