| 编辑推荐: |
本文详细介绍了AUTOSAR开发实战:自适应巡航控制系统 相关内容。 希望对您的学习有所帮助。
本文来自于微信公众号汽车嵌入式学堂,由火龙果软件Linda编辑、推荐。 |
|
一、ACC简介
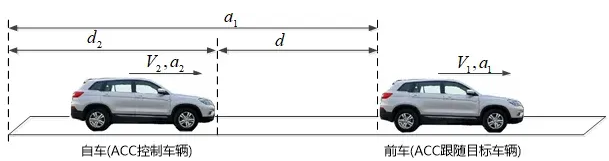
自动驾驶的自适应巡航控制系统(Adaptive Cruise Control, ACC)。这个系统通过集成多种传感器,如雷达和摄像头,检测前方车辆的速度和距离,并根据这些信息调整车辆的速度,以保持与前车的安全距离。此外,ACC还是一种可以高效缓解驾驶疲劳,提高道路车辆行驶安全性的主动安全技术。作为新一代辅助驾驶系统,它可以减轻长期的驾驶负担,还能有效减少错误驾驶和疲劳驾驶引发的交通安全事故,并在现有交通基础设施上增大道路交通通行能力,减少燃油消耗和废气排放。
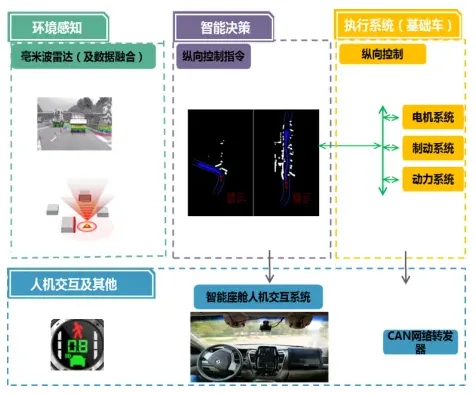
ACC系统主要由环境感知、控制决策、底层执行和人机交互四部分组成。其中,环境感知由毫米波雷达和摄像头组成,通过数据融合,感知周边障碍物信息,如相对速度、纵向距离、横向距离、目标加速度以及置信率等;控制决策是根据感知信息,决策所需要的控制指令;底层执行部分包括驱动和制动系统,根据控制指令协同控制车辆的行驶;人机交互是根据不同驾驶员的驾驶需求调节所需的巡航车速或安全车距。
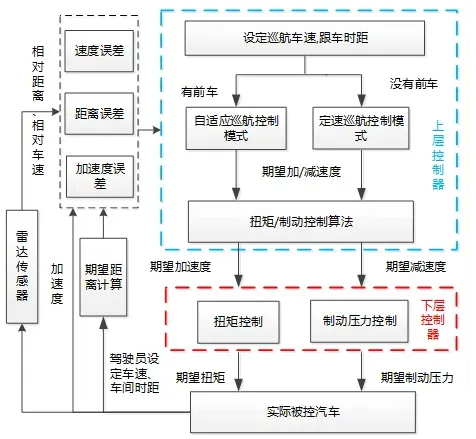
ACC系统的控制逻辑,由图可知,主车行驶首先根据环境感知部分判断前方是否有车辆,若没有车辆,系统进行传统的定速巡航控制;若前方有车辆,则跟随前车行驶,即自适应巡航控制。判断选择何种行驶模式后,根据整车状态、设定车速、设定车距等信息计算相应的期望加/减速度,继而选择响应的驱动/制动方式,使主车保持一定车速或主车前车保持一定车距行驶。
ACC系统需保证驾驶员优先原则,当驾驶员需要超车、制动等主观操作时,该系统需及时被抑制或关闭并由驾驶员接管。另外,ACC系统设计应尽可能保证驾驶的舒适性与安全性,即控制期望加速度保持在-3m/s²
- 1 m/s²。当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶员主动采取制动操作,若驾驶员未采取相应操作时,ACC系统将采取强制制动。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
二、系统需求分析与AUTOSAR规范映射
1.核心需求分解
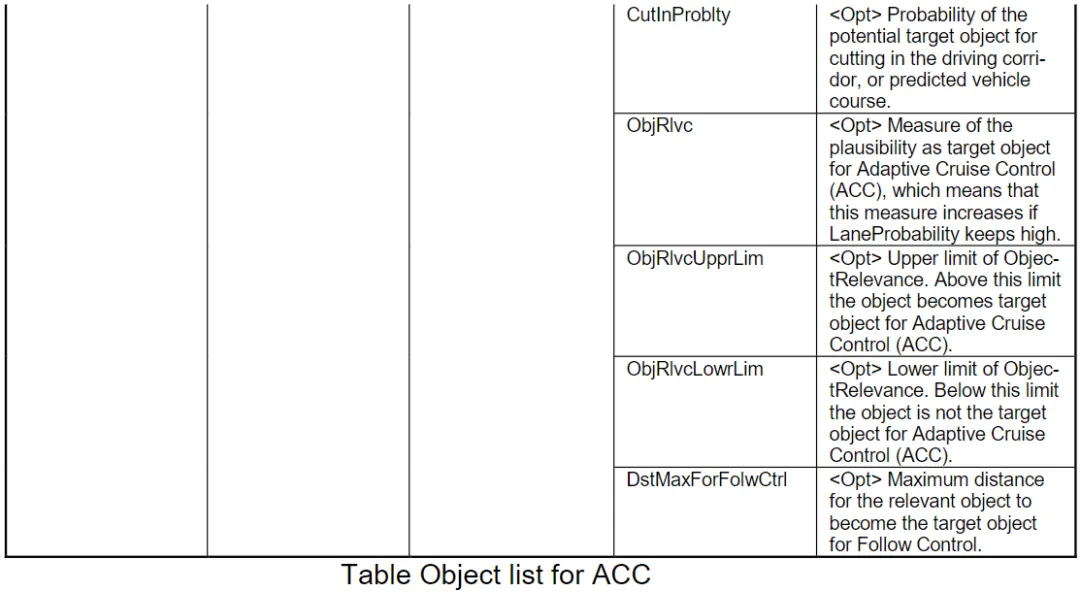
系统需满足GB/T 20608-2006和ISO 15622-2018标准要求,包括距离控制精度(±0.5m)、速度控制误差(±2km/h)、响应时间(制动响应≤300ms)等硬性指标。AUTOSAR规范中定义的CutInProbty(切入概率)、ObjRlvc(目标相关性)等参数用于动态评估目标车辆状态,通过ObjRlvcUpprLim/LowrLim设定阈值范围(如0.7-0.3)实现目标筛选。
2.安全机制设计
需实现AUTOSAR的Dem(Diagnostic Event Manager)模块集成,当雷达失效时触发ASIL-D级故障处理流程,例如:
视觉冗余检测激活(摄像头置信度权重提升至80%)
制动系统降级为机械备份模式
HMI显示黄色警告图标并语音提示接管
三、系统架构设计与模块实现
1.AUTOSAR分层架构
|-- 应用层
| |-- VehicleDetection_SWC(ARXML接口:AccCtrlActv1)
| |-- DistanceMeasurement_SWC
| `-- SpeedControl_SWC(PID参数:P=0.2, I=20, D=0.001)
|-- RTE层
| |-- Sender-Receiver接口(AccCtrlActv数据元素)
| `-- Client-Server接口(诊断服务调用)
|-- BSW层
| |-- CAN Stack(DBC配置:500kbps,ID优先级分配)
| `-- Ethernet Stack(AVB协议,时间同步精度≤10μs)
`-- MCAL层
|-- Radar驱动(SPI接口,DMA传输)
`-- Camera驱动(MIPI CSI-2,H.265硬解码)
|
通过EB tresos Studio完成ARXML元模型配置,支持OIL/DBC/FIBEX格式导入
2.多传感器融合模块
数据预处理:雷达点云通过DBSCAN聚类(ε=0.5m,MinPts=5)消除噪声;摄像头采用YOLOv5s模型(TensorRT加速,推理时间≤15ms)进行车辆检测
融合算法:采用改进EKF算法,将激光雷达点云与视觉检测框进行坐标对齐(误差补偿矩阵Δ=[[0.1,0],[0,0.1]]),动态调整卡尔曼增益系数Q/R
3.速度控制模块
PID控制器配置:在Davinci Developer中配置SpeedControl_SWC的PID参数(P=0.2,
I=20, D=0.001),通过RTE接口接收距离误差信号
抗饱和策略:当积分项超过ECU输出限制(如±100%油门开度)时,启用Clamping机制,防止积分累积导致超调
三、关键技术实现与优化
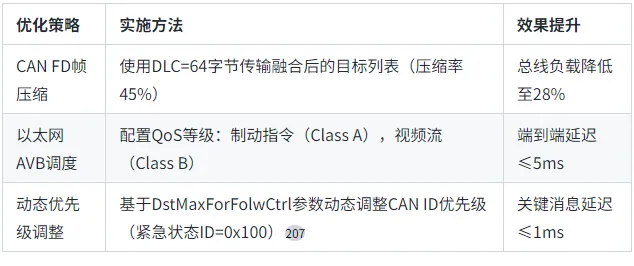
1.通信实时性优化
2.视觉处理性能优化
+-------------------+-----------------+-------------------------+
| 优化维度 | 具体措施 | 性能提升 |
+-------------------+-----------------+-------------------------+
| 算法级 | ROI区域裁剪 | 处理帧率从25fps→60fps |
| 指令级 | NEON SIMD加速 | 卷积运算耗时降低62% |
| 硬件加速 | Tegra TX2 GPU | 目标检测耗时≤8ms |
+-------------------+-----------------+-------------------------+
|
四、测试验证方案
1.Vector CANoe测试配置
<TestEnvironment>
<ECU Simulator>
<Radar Model="ARS408" UpdateRate=100Hz/>
<Camera Model="MV-CH120-10GC" Resolution=1280x720/>
</ECU>
<TestCases>
<TestCase ID="TC-ACC-001">
<Description>Cut-in场景响应测试</Description>
<Precondition>VUT速度=80km/h,前车切入速度=75km/h</Precondition>
<Stimulus>
<CAN Message="0x2A0" Data="00
3C 00 00 4B"/> <!-- 切入概率>0.7 -->
</Stimulus>
<ExpectedResult>制动减速度≥2.5m/s²</ExpectedResult>
</TestCase>
</TestCases>
</TestEnvironment> |
2.HMI验证指标
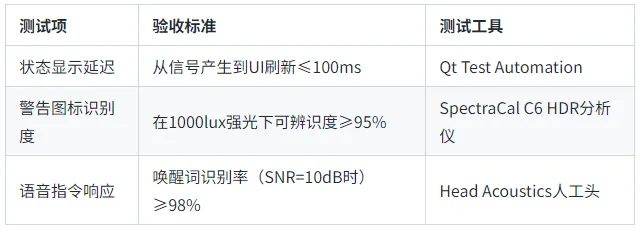
通过上述项目实例,我们成功地使用AUTOSAR框架设计和开发了一个自动驾驶自适应巡航控制系统(ACC),涵盖了车辆检测、距离和速度测量、速度控制和用户界面等多个方面。这个项目展示了从系统需求分析、架构设计到模块开发和系统集成的完整流程。AUTOSAR的模块化和标准化特性使系统的开发更高效和可靠。 | 






 订阅
订阅