| 编辑推荐: |
本文主要介绍了AUTOSAR的3类核心接口及其应用场景相关内容。
希望对您的学习有所帮助。
本文来自于微信公众号汽车嵌入式学堂,由火龙果软件Linda编辑、推荐。 |
|
在汽车电子开发中,AUTOSAR(汽车开放系统架构)通过标准化接口实现了软硬件解耦和模块化设计。其接口体系是开发高效、可移植ECU软件的核心,本文将介绍AUTOSAR的3类核心接口及其应用场景。
一、AUTOSAR接口类型
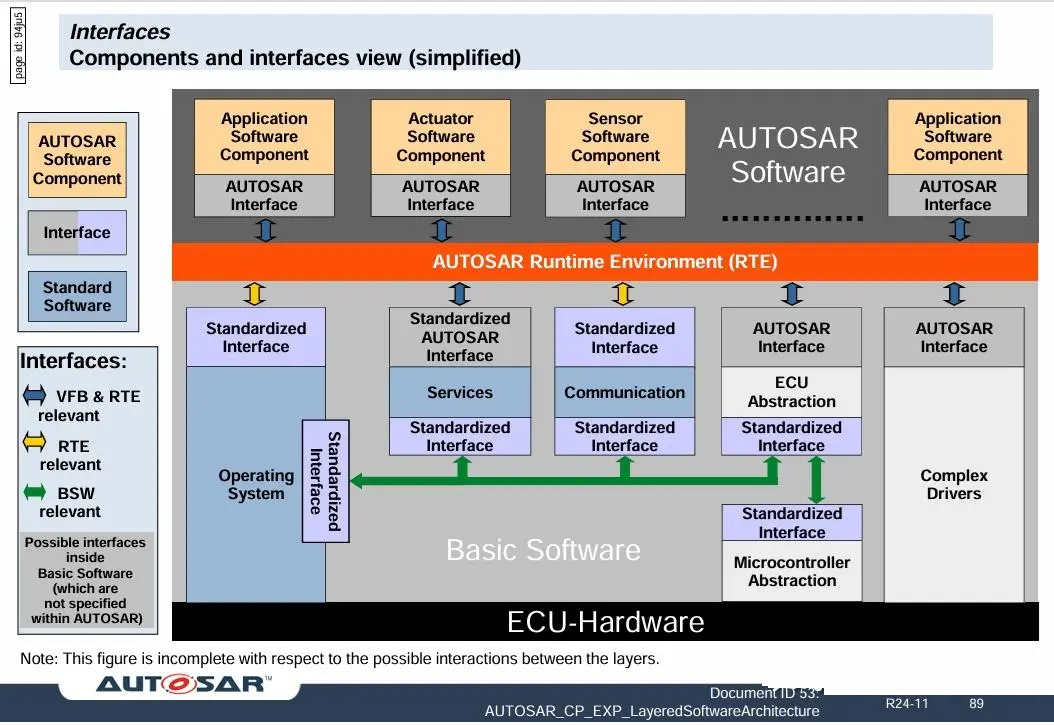
AUTOSAR接口类型
1. AUTOSAR接口(AUTOSAR Interface)
定义与作用
功能定位
由运行时环境(RTE)提供,用于软件组件(SWC)之间或SWC与ECU固件(如IoHwAb、复杂驱动)的通信。
典型应用
控制信号传递(如Rte_Call_RPort_BeamLight_SetDigOut控制大灯)
传感器数据读取(如Rte_IRead_RE_Test_RPort_Speed_uint8获取车速)
技术特性
高度自定义
接口命名和功能由开发者定义,支持跨ECU透明通信。
统一通信形式
// 示例:SR接口数据写入
Rte_Write_WheelSpeed(GetSensorValue());
// 示例:CS服务调用
Rte_ResultType ret = Rte_Call_DiagService_ReadData(0x1234, &resp);
|
工程约束
禁止直接操作全局变量,需通过RTE接口函数传递数据
原因分析
数据隔离性:
RTE通过内存分区隔离不同SWC的地址空间,直接访问全局变量会破坏内存保护机制。
时序一致性:
RTE的隐式接口(如Rte_IRead)通过副本机制保证数据在Runnable执行周期内的稳定性。
通信完整性:
RTE接口内置校验机制(如CRC、范围检查),直接操作变量会绕过安全防护。
// 错误做法:直接访问全局变量
externuint16g_speed;
voidProcessSpeed(){
if(g_speed>120){// 可能被其他SWC异步修改
TriggerAlarm();
}
}
// 正确做法:通过RTE接口
uint16speed=Rte_IRead_Speed();// 获取执行周期内的稳定副本
if(speed>120){
TriggerAlarm();
}
|
S/R接口若使用队列,需显式定义队列深度(Queue Depth)和数据校验策略。
原因分析
抗突发流量:
队列缓冲机制可应对CAN/LIN总线的信号突发,避免数据丢失。
公式:最小队列深度 = (突发周期 / 传输周期) + 1
防数据篡改:
CRC校验可检测通信过程中的位翻转或恶意注入。
// RTE自动生成的校验代码
if(CRC8_Check(data_packet) != VALID) {
ReportError(RTE_E_DATA_CORRUPTED);
}
|
2. 标准化AUTOSAR接口(Standardized AUTOSAR Interface)
定义与作用
功能定位
AUTOSAR标准预定义的接口,用于访问基础软件(BSW)服务,如诊断事件管理、ECU状态管理、存储器读写。
典型应用
诊断服务
Dem_SetEventStatus报告故障码
非易失存储
NvM_ReadBlock读取Flash数据
技术特性
严格标准化
函数名、参数、语义由AUTOSAR规范强制定义。
服务层专用
仅服务层BSW模块提供此类接口。
代码示例
// 示例:NvM数据读取
NvM_ReadBlock(NVM_ID_ODOMETER, &odoValue, CRC32(odoValue));
// 示例:诊断事件上报
Dem_SetEventStatus(DEM_EVENT_ID_LOW_BATTERY, DEM_EVENT_STATUS_FAILED);
|
3. 标准化接口(Standardized Interface)
定义与作用
功能定位
以C语言API形式实现,用于基础软件(BSW)模块间、RTE与操作系统、RTE与通信模块的交互。
典型应用
任务调度:Os_Schedule()触发任务切换
通信管理:Com_SendSignal()发送CAN信号
技术特性
底层专用
应用层软件组件(ASW)无法直接调用。
性能优化
直接操作硬件资源,支持μs级实时性。
实现机制
// 示例:操作系统任务触发
void Os_Task_10ms() {
Os_Schedule(); // 触发任务调度
Rte_Switch_BMS_MainFunction();
}
// 示例:CAN信号发送
Com_SendSignal(COM_SIGNAL_ID_SPEED, &speedData);
|
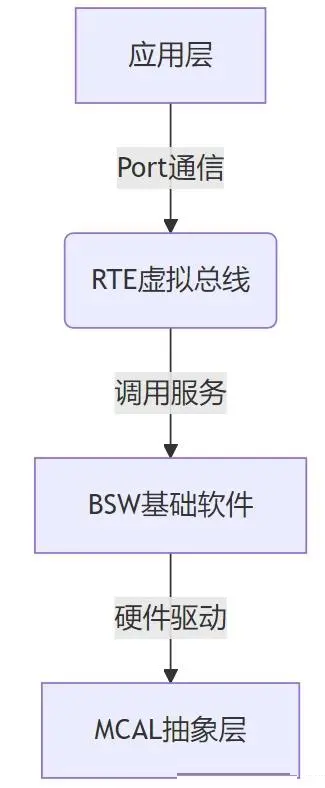
二、接口层级与访问规则
1. 水平接口(同一层内通信)
允许场景

禁止场景
微控制器抽象层(μC层)
禁止水平接口(DMA配置等性能关键操作除外)
直接硬件操作
禁止应用层绕过RTE访问BSW接口
2. 垂直接口(跨层通信)
允许规则
自上而下调用
上层可访问所有下层接口,如应用层调用服务层的Dem_SetEventStatus
禁止规则
应用层直接访问BSW/μC层接口
应用层SWC禁止直接调用BSW模块(如NvM、Dem)或微控制器层(MCAL)接口。
原因分析
硬件抽象:
RTE层作为硬件抽象层,需隔离应用逻辑与硬件特性。直接访问BSW会破坏可移植性。
案例:某车型更换MCU型号后,因SWC直接调用Adc_ReadChannel()导致大量适配工作。
功能安全:
BSW模块(如NvM)需执行ASIL等级的安全检查,直接绕过RTE调用会引入未受控风险。
资源竞争:MCAL层接口(如CAN发送)通常涉及硬件寄存器操作,需通过BSW进行原子性保护。
// 错误做法:直接调用NvM接口
NvM_ReadBlock(NVM_ID_ODO, &odo); // 未进行权限校验
// 正确做法:通过RTE接口
Rte_Call_NvM_ReadOdo(&odo); // RTE内嵌访问控制
|
逆向调用
禁止下层调用上层接口(如BSW模块调用SWC算法)
原因分析
架构解耦:AUTOSAR的分层架构要求单向依赖(上层→下层),反向调用会导致循环依赖和架构腐化。
实时性保障:底层中断服务程序(ISR)若调用上层接口,可能因任务优先级导致死锁或响应延迟 。
案例:某ECU因CAN驱动ISR调用应用层回调函数,引发系统死锁。
可测试性:反向调用会增加模块间的耦合度,使单元测试和故障隔离变得困难。
三、约束机制的“双刃剑”效应
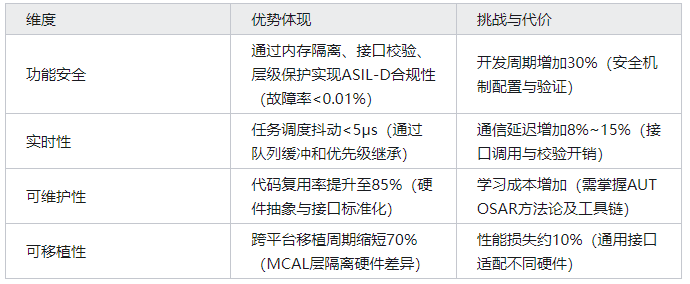
AUTOSAR的机制本质是通过标准化换取安全性与可维护性,但其代价是开发成本、资源消耗与灵活性的妥协。实际应用中需根据项目需求选择适配策略:
高安全/长生命周期系统
优先采用完整AUTOSAR架构,如EPS控制器。
低成本/快速迭代项目
采用“裁剪版AUTOSAR”或结合传统开发模式,如车身控制模块。 | 






 订阅
订阅