| БрМЭЦМі: |
БОЮФРДздгкcsdnЃЌБОЮФеТжївЊНщЩмСЫЩюЖШбЇЯАгыЧПЛЏбЇЯАНсКЯЦ№РДДгЖјЪЕЯжДгИажЊЃЈPerceptionЃЉЕНЖЏзїЃЈ
Action ЃЉЕФЖЫЖдЖЫЃЈEnd-to-endЃЉбЇЯАЕФвЛжжШЋаТЕФЫуЗЈЁЃ
|
|
вЛЁЂDRL
двђЃКдкЦеЭЈЕФQ-learningжаЃЌЕБзДЬЌКЭЖЏзїПеМфЪЧРыЩЂЧвЮЌЪ§ВЛИпЪБПЩЪЙгУQ-TableДЂДцУПИізДЬЌЖЏзїЖдЕФQжЕЃЌЖјЕБзДЬЌКЭЖЏзїПеМфЪЧИпЮЌСЌајЪБЃЌЪЙгУQ-TableВЛЯжЪЕЁЃ
ЭЈГЃзіЗЈЪЧАбQ-TableЕФИќаТЮЪЬтБфГЩвЛИіКЏЪ§ФтКЯЮЪЬтЃЌЯрНќЕФзДЬЌЕУЕНЯрНќЕФЪфГіЖЏзїЁЃШчЯТЪНЃЌЭЈЙ§ИќаТВЮЪ§
ІШІШ ЪЙQКЏЪ§БЦНќзюгХQжЕ
ЖјЩюЖШЩёОЭјТчПЩвдздЖЏЬсШЁИДдгЬиеїЃЌвђДЫЃЌУцЖдИпЮЌЧвСЌајЕФзДЬЌЪЙгУЩюЖШЩёОЭјТчзюКЯЪЪВЛЙ§СЫЁЃ
DRLЪЧНЋЩюЖШбЇЯАЃЈDLЃЉгыЧПЛЏбЇЯАЃЈRLЃЉНсКЯЃЌжБНгДгИпЮЌдЪМЪ§ОнбЇЯАПижЦВпТдЁЃЖјDQNЪЧDRLЕФЦфжавЛжжЫуЗЈЃЌЫќвЊзіЕФОЭЪЧНЋОэЛ§ЩёОЭјТчЃЈCNNЃЉКЭQ-LearningНсКЯЦ№РДЃЌCNNЕФЪфШыЪЧдЪМЭМЯёЪ§ОнЃЈзїЮЊзДЬЌStateЃЉЃЌЪфГідђЪЧУПИіЖЏзїActionЖдгІЕФМлжЕЦРЙРValue
FunctionЃЈQжЕЃЉЁЃ
ЖўЁЂDLгыRLНсКЯЕФЮЪЬт
DLашвЊДѓСПДјБъЧЉЕФбљБОНјааМрЖНбЇЯАЃЛRLжЛгаrewardЗЕЛижЕЃЌЖјЧвАщЫцзХдыЩљЃЌбгГйЃЈЙ§СЫМИЪЎКСУыВХЗЕЛиЃЉЃЌЯЁЪшЃЈКмЖрStateЕФrewardЪЧ0ЃЉЕШЮЪЬтЃЛ
DLЕФбљБОЖРСЂЃЛRLЧАКѓstateзДЬЌЯрЙиЃЛ
DLФПБъЗжВМЙЬЖЈЃЛRLЕФЗжВМвЛжББфЛЏЃЌБШШчФуЭцвЛИігЮЯЗЃЌвЛИіЙиПЈКЭЯТвЛИіЙиПЈЕФзДЬЌЗжВМЪЧВЛЭЌЕФЃЌЫљвдбЕСЗКУСЫЧАвЛИіЙиПЈЃЌЯТвЛИіЙиПЈгжвЊжиаТбЕСЗЃЛ
Й§ЭљЕФбаОПБэУїЃЌЪЙгУЗЧЯпадЭјТчБэЪОжЕКЏЪ§ЪБГіЯжВЛЮШЖЈЕШЮЪЬтЁЃ
Ш§ЁЂDQNНтОіЮЪЬтЗНЗЈ
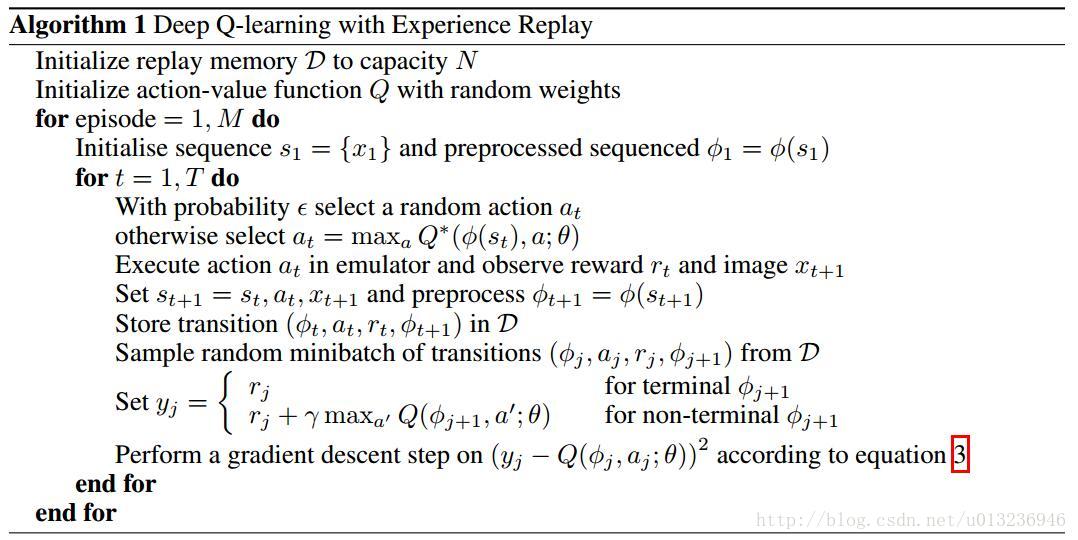
ЭЈЙ§Q-LearningЪЙгУrewardРДЙЙдьБъЧЉЃЈЖдгІЮЪЬт1ЃЉ
ЭЈЙ§experience replayЃЈОбщГиЃЉЕФЗНЗЈРДНтОіЯрЙиадМАЗЧОВЬЌЗжВМЮЪЬтЃЈЖдгІЮЪЬт2ЁЂ3ЃЉ
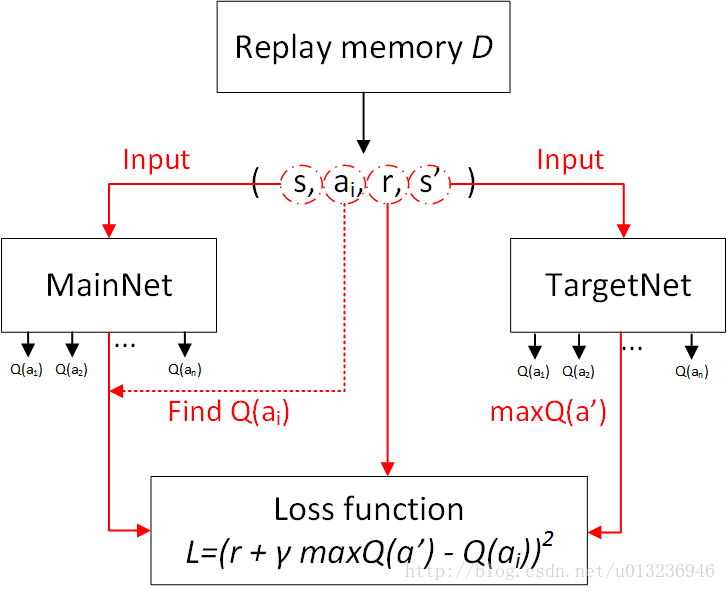
ЪЙгУвЛИіCNNЃЈMainNetЃЉВњЩњЕБЧАQжЕЃЌЪЙгУСэЭтвЛИіCNNЃЈTargetЃЉВњЩњTarget QжЕЃЈЖдгІЮЪЬт4ЃЉ
1ЁЂЙЙдьБъЧЉ
ЧАУцЬсЕНDQNжаЕФCNNзїгУЪЧЖддкИпЮЌЧвСЌајзДЬЌЯТЕФQ-TableзіКЏЪ§ФтКЯЃЌЖјЖдгкКЏЪ§гХЛЏЮЪЬтЃЌМрЖНбЇЯАЕФвЛАуЗНЗЈЪЧЯШШЗЖЈLoss
FunctionЃЌШЛКѓЧѓЬнЖШЃЌЪЙгУЫцЛњЬнЖШЯТНЕЕШЗНЗЈИќаТВЮЪ§ЁЃDQNдђЛљгкQ-LearningРДШЗЖЈLoss
FunctionЁЃ
Q-Learning
гаЙиRLЕФЛљДЁжЊЪЖВЛдйЊрТЃЌжБНгПДQ-LearningЕФИќаТЙЋЪНЃК
| Q?(s,a)=Q(s,a)+ІС(r+ІУmaxaЁфQ(sЁф,aЁф)?Q(s,a))
|
ЖјDQNЕФLoss FunctionЮЊ
| L(ІШ)=E[(TargetQ?Q(s,a;ІШ))2]
|
Цфжа ІШІШ ЪЧЭјТчВЮЪ§ЃЌФПБъЮЊ
| TargetQ=r+ІУmaxaЁфQ(sЁф,aЁф;ІШ)
|
ЯдШЛLoss FunctionЪЧЛљгкQ-LearningИќаТЙЋЪНЕФЕкЖўЯюШЗЖЈЕФЃЌСНИіЙЋЪНвтвхЯрЭЌЃЌЖМЪЧЪЙЕБЧАЕФQжЕБЦНќTarget
QжЕЁЃ
НгЯТРДЃЌЧѓ L(ІШ)L(ІШ) Йигк ІШІШ ЕФЬнЖШЃЌЪЙгУSGDЕШЗНЗЈИќаТЭјТчВЮЪ§ ІШІШЁЃ
2ЁЂОбщГиЃЈexperience replayЃЉ
ОбщГиЕФЙІФмжївЊЪЧНтОіЯрЙиадМАЗЧОВЬЌЗжВМЮЪЬтЁЃОпЬхзіЗЈЪЧАбУПИіЪБМфВНagentгыЛЗОГНЛЛЅЕУЕНЕФзЊвЦбљБО
(st,at,rt,st+1)(st,at,rt,st+1) ДЂДцЕНЛиЗХМЧвфЕЅдЊЃЌвЊбЕСЗЪБОЭЫцЛњФУГівЛаЉЃЈminibatchЃЉРДбЕСЗЁЃЃЈЦфЪЕОЭЪЧНЋгЮЯЗЕФЙ§ГЬДђГЩЫщЦЌДцДЂЃЌбЕСЗЪБЫцЛњГщШЁОЭБмУтСЫЯрЙиадЮЪЬтЃЉ
3ЁЂФПБъЭјТч
дкNature 2015АцБОЕФDQNжаЬсГіСЫетИіИФНјЃЌЪЙгУСэвЛИіЭјТчЃЈетРяГЦЮЊTargetNetЃЉВњЩњTarget
QжЕЁЃОпЬхЕиЃЌQ(s,a;ІШi)Q(s,a;ІШi) БэЪОЕБЧАЭјТчMainNetЕФЪфГіЃЌгУРДЦРЙРЕБЧАзДЬЌЖЏзїЖдЕФжЕКЏЪ§ЃЛQ(s,a;ІШ?i)Q(s,a;ІШi?)
БэЪОTargetNetЕФЪфГіЃЌДњШыЩЯУцЧѓ TargetQTargetQ жЕЕФЙЋЪНжаЕУЕНФПБъQжЕЁЃИљОнЩЯУцЕФLoss
FunctionИќаТMainNetЕФВЮЪ§ЃЌУПОЙ§NТжЕќДњЃЌНЋMainNetЕФВЮЪ§ИДжЦИјTargetNetЁЃ
в§ШыTargetNetКѓЃЌдйвЛЖЮЪБМфРяФПБъQжЕЪЙБЃГжВЛБфЕФЃЌвЛЖЈГЬЖШНЕЕЭСЫЕБЧАQжЕКЭФПБъQжЕЕФЯрЙиадЃЌЬсИпСЫЫуЗЈЮШЖЈадЁЃ
ЫФЁЂDQNЫуЗЈСїГЬ
1ЁЂЭјТчФЃаЭ
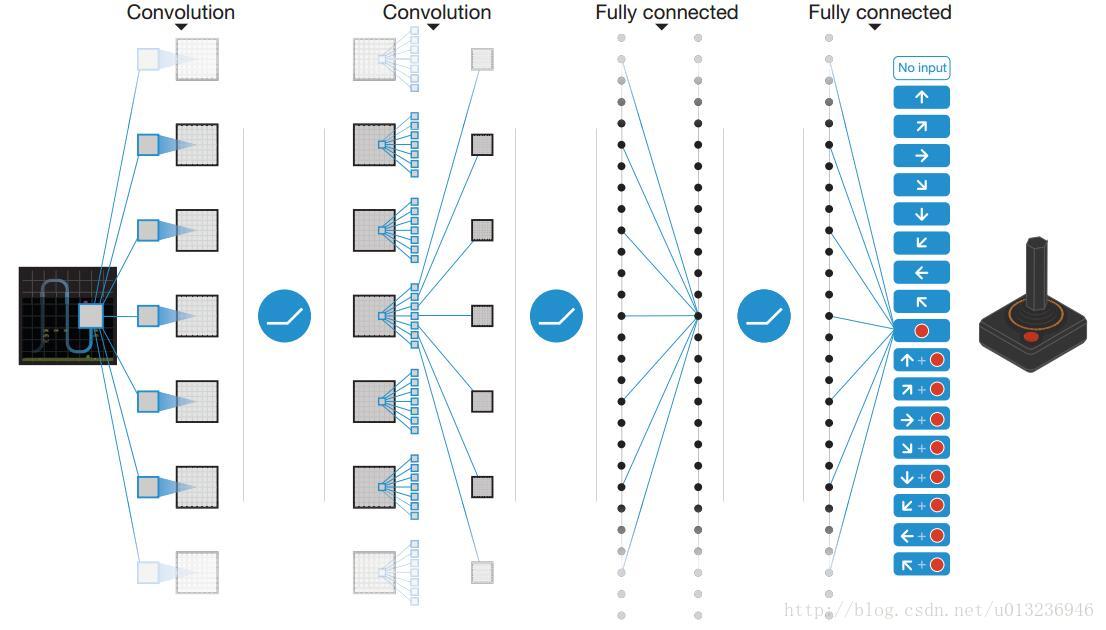
ЪфШыЕФЪЧБЛДІРэГЩЛвЖШЭМЕФзюНќ4жЁ 84ЁС8484ЁС84 ЭМЯёЃЌОЙ§МИИіОэЛ§ВуЃЈУЛгаГиЛЏВуЃЉКѓНгСНИіШЋСЌНгВуЃЌЪфГіЪЧЫљгаЖЏзїЕФQжЕЁЃ
2ЁЂЫуЗЈЮБДњТы
NIPS 2013Ац
Nature 2015Ац
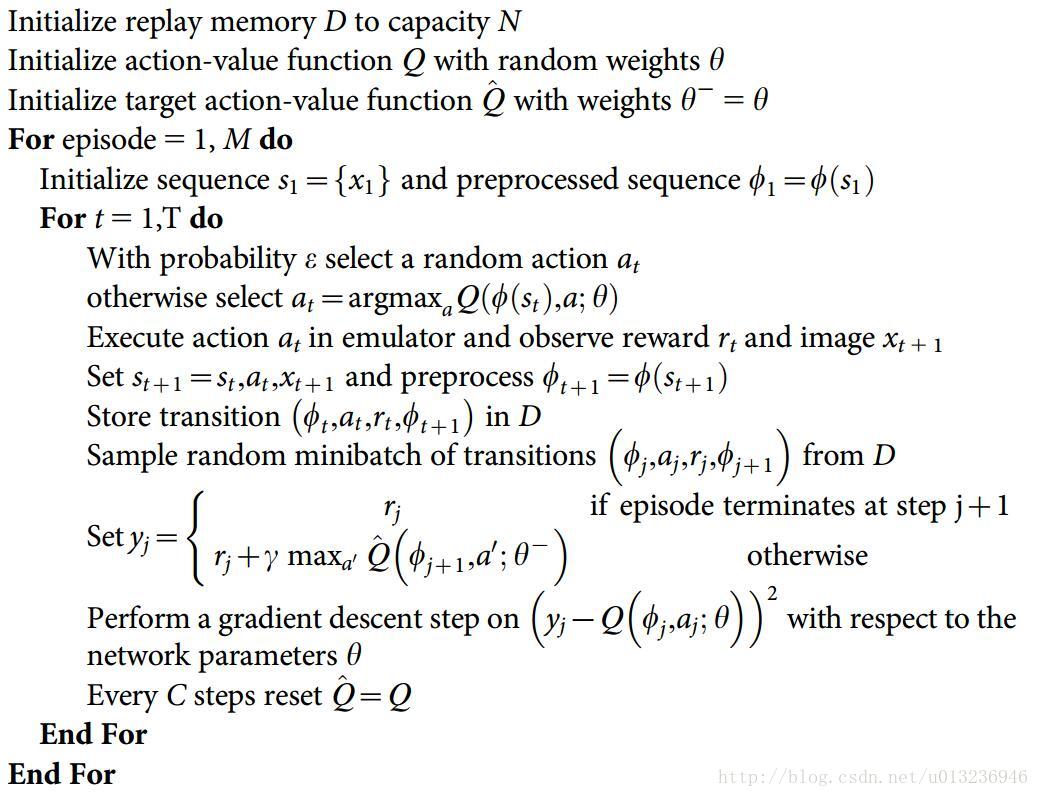
2ЁЂЫуЗЈСїГЬЭМЃЈ2015АцЃЉ
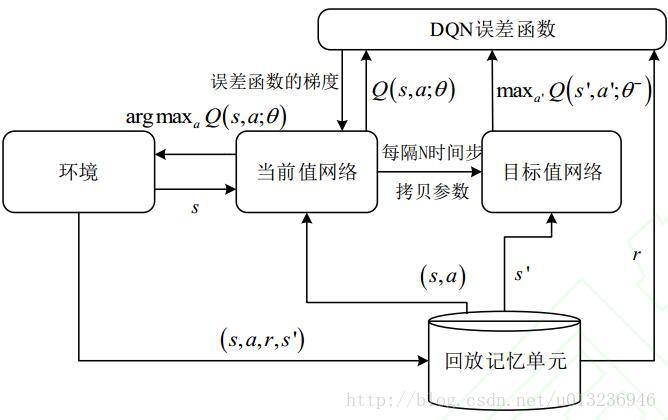
жївЊСїГЬЭМ Loss Function ЕФЙЙдь
ЮхЁЂзмНс
DQNЪЧЕквЛИіНЋЩюЖШбЇЯАФЃаЭгыЧПЛЏбЇЯАНсКЯдквЛЦ№ДгЖјГЩЙІЕижБНгДгИпЮЌЕФЪфШыбЇЯАПижЦВпТдЁЃ
ДДаТЕуЃК
ЛљгкQ-LearningЙЙдьLoss FunctionЃЈВЛЫуКмаТЃЌЙ§ЭљЪЙгУЯпадКЭЗЧЯпадКЏЪ§ФтКЯQ-TableЪБОЭЪЧетбљзіЃЉЁЃ
ЭЈЙ§experience replayЃЈОбщГиЃЉНтОіЯрЙиадМАЗЧОВЬЌЗжВМЮЪЬтЃЛ
ЪЙгУTargetNetНтОіЮШЖЈадЮЪЬтЁЃ
гХЕуЃК
ЫуЗЈЭЈгУадЃЌПЩЭцВЛЭЌгЮЯЗЃЛ
End-to-End бЕСЗЗНЪНЃЛ
ПЩЩњВњДѓСПбљБОЙЉМрЖНбЇЯАЁЃ
ШБЕуЃК
ЮоЗЈгІгУгкСЌајЖЏзїПижЦЃЛ
жЛФмДІРэжЛашЖЬЪБМЧвфЮЪЬтЃЌЮоЗЈДІРэашГЄЪБМЧвфЮЪЬтЃЈКѓајбаОПЬсГіСЫЪЙгУLSTMЕШИФНјЗНЗЈЃЉЃЛ
CNNВЛвЛЖЈЪеСВЃЌашОЋСМЕїВЮЁЃ
|









