| БрМЭЦМі: |
БОЮФгкcsdn,НщЩмСЫЛњЦїбЇЯАдкЙЄвЕзЪВњжаЕФгІгУЃЌЛњЦїбЇЯАЕФРраЭЃЌУцЯђЩюЖШбЇЯАЕФЯЕЭГЩшМЦЃЌIoT
ПижЦЩшМЦЕФаТЗНЯђЕШЁЃ
|
|
ЮЊСЫИќКУЕиЗўЮёгкФПБъПЭЛЇ, ЧЖШыЪНЩшМЦЭХЖгвВдкбаОПаТММЪѕ, ШчЛњЦїбЇЯАКЭЩюЖШбЇЯАЁЃ
ЩюЖШбЇЯАдЪаэетаЉЩшМЦЪІвдгаЯоЕФзЪдДИќПьЕиПЊЗЂКЭВПЪ№ИДдгЕФЯЕЭГКЭЩшБИЁЃ ЭЈЙ§етаЉММЪѕ, ЩшМЦЭХЖгПЩвдЪЙгУЪ§ОнЧ§ЖЏЕФЗНЗЈНЈСЂЯЕЭГЛђИДдгЕФЯЕЭГФЃаЭЁЃ
ЛњЦїбЇЯАКЭЩюЖШбЇЯАВЛЪЧгУЛљгкЮяРэЕФФЃаЭРДУшЪіЯЕЭГЕФааЮЊ, ЖјЪЧДгЪ§ОнЭЦЕМГіЯЕЭГЕФФЃаЭЁЃЕБашвЊДІРэЕФЪ§ОнСПЯрЖдНЯаЁ,
ЖјЧвЮЪЬтЕФИДдгадНЯЕЭЪБ, ДЋЭГЕФЛњЦїбЇЯАЫуЗЈЪЧгагУЕФЁЃЕЋЪЧ, ШчЙћгаИќЖрЕФЪ§Он, БШШчЮоШЫЛњ, ФЧУДИќДѓЕФЮЪЬтгжШчКЮФиЃП
етИіЬєеНашвЊЩюЖШбЇЯАММЪѕЁЃ етжжММЪѕНЋАбЮвУЧЭЦЯђЯТвЛИіПижЦЩшМЦКЭЮяСЊЭјгІгУЕФЪБДњЁЃ
ЛњЦїбЇЯАдкЙЄвЕзЪВњжаЕФгІгУ
ЪзЯШ, ПМТЧЛњЦїбЇЯАММЪѕдкЙЄвЕзЪВњзДЬЌМрВтжаЕФгІгУЁЃЛњЦїбЇЯАНЋЛљгкЬѕМўЕФМрВтгІгУДгБЛЖЏКЭдЄЗРадЮЌЛЄЕФЪБДњЙ§ЖЩЕНдЄВтадЮЌЛЄЁЃ
етаЉММЪѕгУРДМьВтвьГЃааЮЊ, еяЖЯЮЪЬт, ВЂдкФГжжГЬЖШЩЯдЄВтСЫЙЄвЕзЪВњЕФЪЃгрЪЙгУЪйУќ, БШШчТэДя, ЫЎБУКЭЮаТжЛњЕШЕШЁЃ
ЛљгкЛњЦїбЇЯАПЊЗЂКЭВПЪ№ФЃаЭЕФЙЄзїСїГЬШчЭМ1ЫљЪОЃК
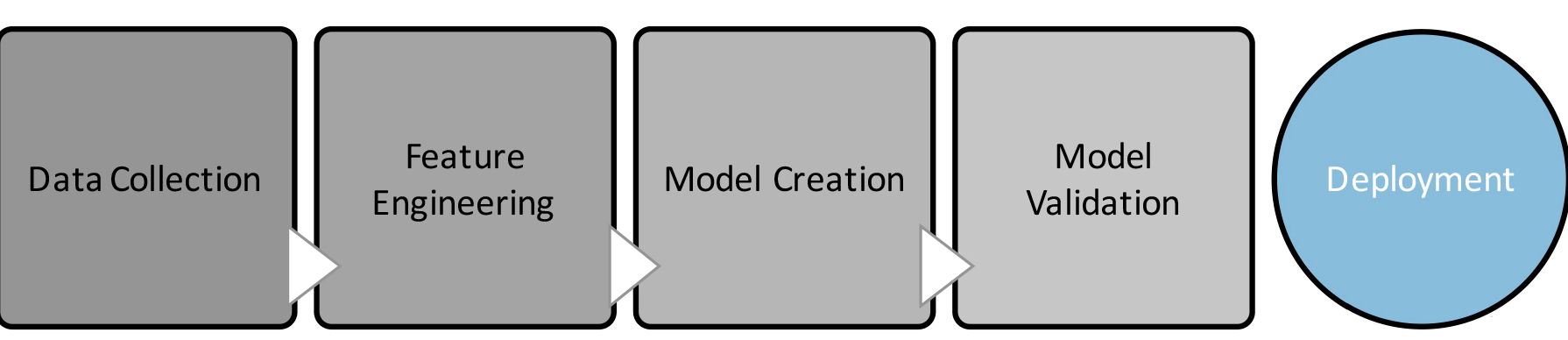
ЭМ1 ЗжЮіЙЄзїСїГЬгыЛњЦїбЇЯА
ПДПДетИіСїГЬЪЧШчКЮгУРДМрВтТэДяНЁПЕзДПіЕФЁЃЪ§ОнРДздгкЖржжРраЭЕФДЋИаЦї, ШчМгЫйЖШМЦ, ШШЕчХМКЭЕчЖЏЛњЩЯЕФЕчСїДЋИаЦїЕШЁЃ
ЬиеїЙЄГЬЭЈГЃгЩСНВПЗжзщГЩ: ЬиеїЬсШЁКЭЬиеїЬсСЖ(ЭМ2)ЁЃ
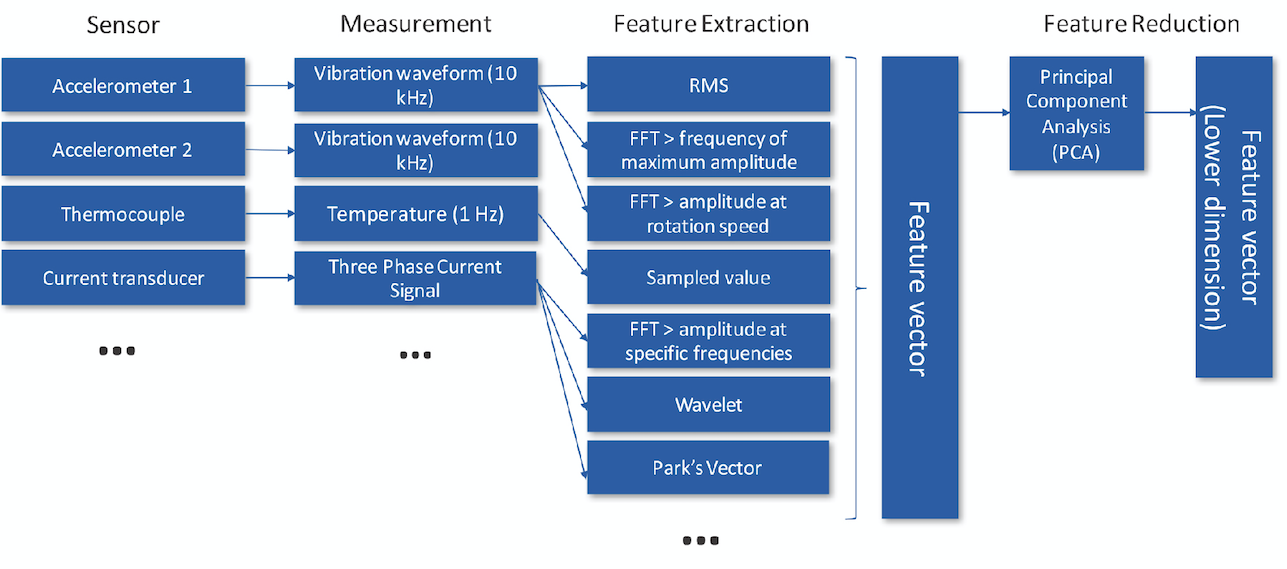
ЭМ2 ЬиеїЙЄГЬ
ЬиеїЬсШЁЪЧгУРДДгдЪМЪ§Он(ЛђВЈаЮ)жаЛёШЁгагУаХЯЂ, вдСЫНтзЪВњЕФНЁПЕзДПіЁЃР§Шч, ДгЕчЖЏЛњЗЂГіЕФЕчСїаХКХЕФЦЕЦзАќКЌСЫПЩгУгкМьВтЙЪеЯЕФаХЯЂ,
ШчЭМ3ЫљЪОЁЃ ЦЕЦзжаВЛЭЌЦЕЖЮЕФЦНОљеёЗљПЩвдзїЮЊДгЕБЧАаХКХжаЬсШЁЕФЬиеїЁЃ ДгЖрИіДЋИаЦїжаЬсШЁЕФЬиеїПЩФмгаШпграХЯЂЁЃ
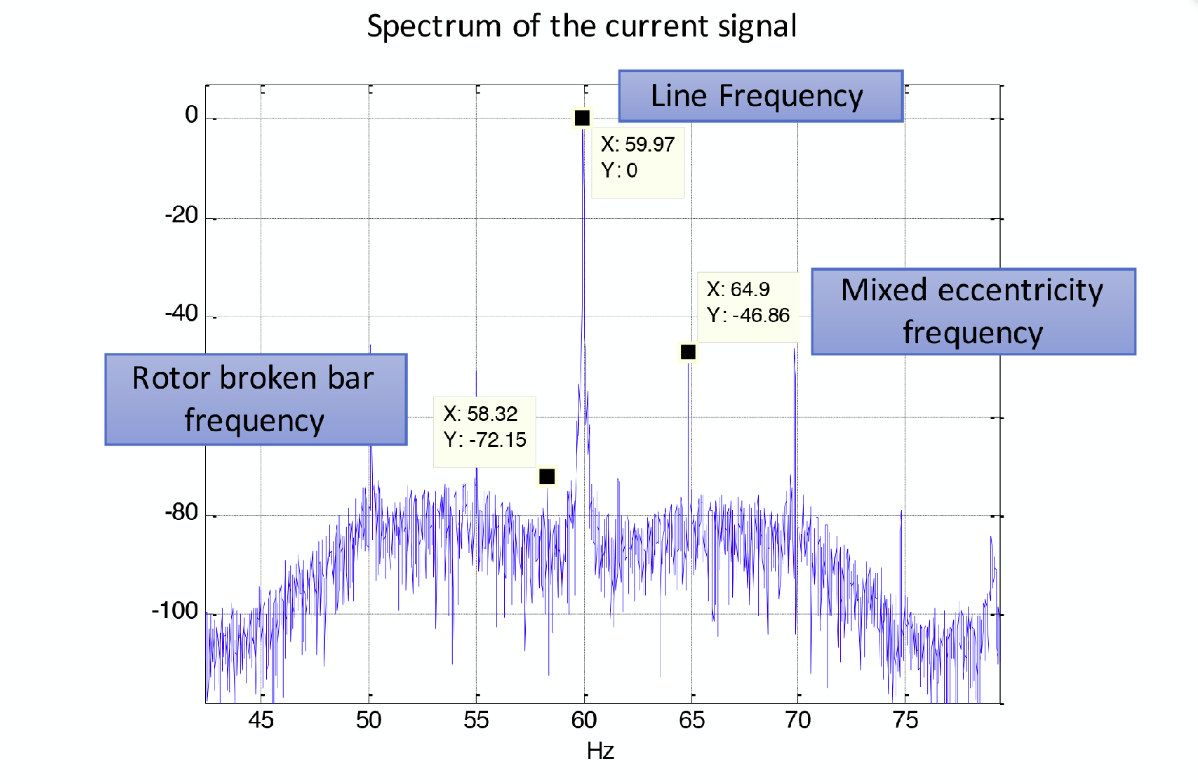
ЭМ3 ДгЕчЛњЕчСїаХКХжаЬсШЁЬиеї
вЛжжЬиеїЬсСЖЕФЗНЗЈЪЧжїГЩЗжЗжЮі(PCA) , ПЩвдгУРДМѕЩйзюжегУгкЙЙНЈФЃаЭЕФЬиадЪ§СПЁЃЁЂЬиеїЪ§СПЕФЫѕМѕПЩвдМѕЩйЫљЪЙгУЛњЦїбЇЯАФЃаЭЕФИДдгадЁЃЫѕМѕЕФЬиеїМЏБЛБэЪОЮЊЯђСП(ЛђЪ§зщ)
, ВЂЪфШыЕНФЃаЭЪЙгУЕФЛњЦїбЇЯАЫуЗЈжаЁЃ
ЛњЦїбЇЯАЕФРраЭ
ФЃаЭДДНЈКЭбщжЄЪЧвЛИіЕќДњЙ§ГЬ, ЭЈЙ§етИіЙ§ГЬ, ПЩвдЪЕбщМИжжЛњЦїбЇЯАЫуЗЈ, ВЂбЁдёзюЪЪКЯФПБъгІгУЕФЫуЗЈЁЃвЛжжЗЧМрЖНЕФЛњЦїбЇЯАЫуЗЈ,
ШчИпЫЙЛьКЯФЃаЭ(GMM) , ПЩвдгУРДФЃФтЕчЛњЕФе§ГЃааЮЊ, ВЂМьВтЕчЛњКЮЪБПЊЪМЦЋРыЦфЛљЯпЁЃ ЗЧМрЖНЕФЗНЗЈгаРћгкЗЂЯжЪ§ОнжавўВиЕФФЃЪН,
ЖјЮоашЖдЪ§ОнНјааБъМЧЁЃ
ЫфШЛЗЧМрЖНбЇЯАПЩвдгУРДМьВтТэДяжаЕФвьГЃ, ЖјМрЖНбЇЯАдђашвЊМьВтвьГЃЕФдвђЁЃ дкМрЖНбЇЯАжа, ЬсГіСЫвЛЖдЪфШыЪ§ОнКЭЫљашЪфГіЕФЫуЗЈЁЃетаЉЪ§ОнБЛГЦЮЊБъМЧЪ§ОнЁЃИУЫуЗЈЪЧНЋЪфШыгГЩфЕНЪфГіЕФКЏЪ§ЁЃгУгкбЕСЗЛњЦїбЇЯАЫуЗЈЕФЪ§ОнАќРЈдке§ГЃКЭДэЮѓЬѕМўЯТЬсШЁЕФЬиеїЁЃ
етаЉЬиЬиеїЪЧгУвЛзщБъЧЉРДЧхГўЕиБъЪЖГіТэДяЕФзДЬЌЁЃ жЇГжЯђСПЛњЁЂ LogitФЃаЭКЭШЫЙЄЩёОЭјТчЪЧГЃгУЕФМрЖНЪНЛњЦїбЇЯАЫуЗЈЁЃ
ЖдДЋЭГЛњЦїбЇЯАММЪѕЕФЬєеНЪЧЬиеїЬсШЁЙ§ГЬЁЃ етЪЧвЛИіДрШѕЕФЙ§ГЬ, ашвЊСьгђзЈМвЕФжЊЪЖ, ЭЈГЃЪЧЛњЦїбЇЯАЙЄзїСїГЬжаЕФЪЄИКЙиМќЁЃ
ЯђЩюЖШбЇЯАЙЄзїСїГЬЕФТѕНј
ЩюЖШбЇЯАЫуЗЈзюНќдНРДдНСїаа, ПЩФмЪЧвђЮЊЫќУЧВЛдйашвЊЬиеїЙЄГЬВНжшЁЃДгДЋИаЦїЛёЕУЕФЪ§Он(дЪМВтСП)ПЩвджБНгЪфШы
DL ЫуЗЈ, ШчЭМ4ЫљЪОЁЃ
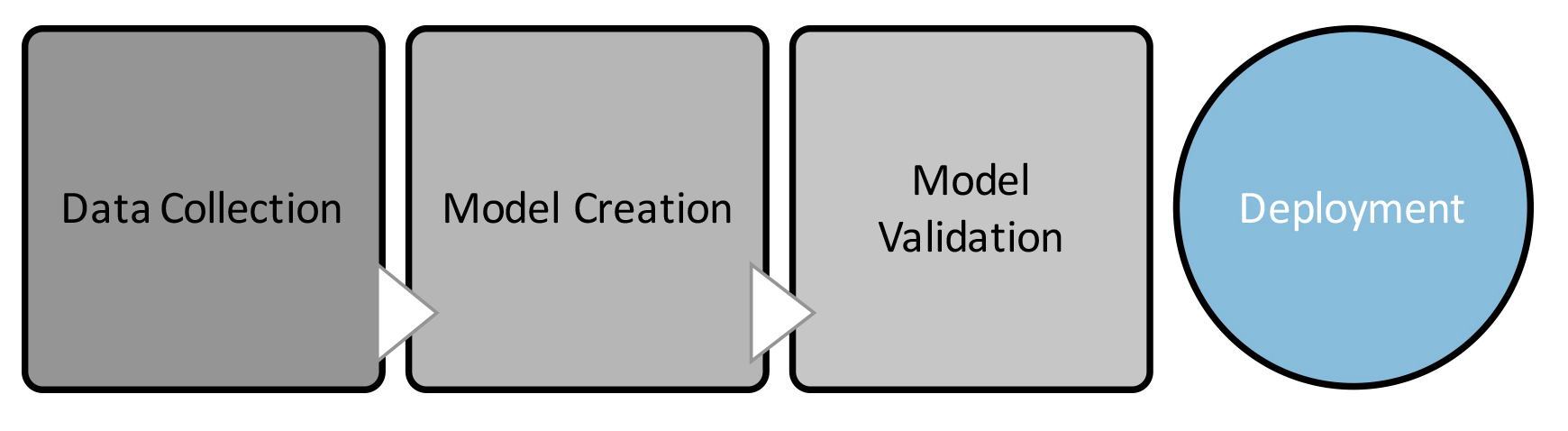
ЭМ4 ЩюЖШбЇЯАЕФЙЄзїСїГЬ
ЩюЖШбЇЯАЫуЗЈЪЧЛљгкШЫЙЄЩёОЭјТчЕФЁЃШЫЙЄЩёОЭјТчЫуЗЈЪмЕНСЫЩњЮяЩёОЭјТчНсЙЙКЭЙІФмЗНУцЕФЦєЗЂЁЃетаЉЫуЗЈЕФНсЙЙаЮЪНЪЧгЩвЛзщЯрЛЅСЌНгЕФМЦЫуНкЕу(ШЫЙЄЩёОдЊ)зщГЩЕФВуДЮНсЙЙЁЃ
ЕквЛВуБЛГЦЮЊЪфШыВу, ЫќЪЧЪфШыаХКХЛђЪ§ОнЕФНгПкЁЃзюКѓвЛВуЪЧЪфГіВу, етвЛВужаЩёОдЊЪфГізюжеЕФдЄВтЛђНсЙћЁЃ
дкЪфШыКЭЪфГіВужЎМф, гавЛИіЛђЖрИівўВиВу(ЭМ5)ЁЃ вЛВуЕФЪфГіЭЈЙ§МгШЈКѓСЌНгЕНЯТвЛВуЕФНкЕуЁЃЭјТчЭЈЙ§аоИФетаЉШЈжиРДбЇЯАЪфШыКЭЪфГіжЎМфЕФгГЩфЁЃЭЈЙ§ЪЙгУЖрИівўВиВу,
ЩюЖШбЇЯАЫуЗЈДгЪфШыЪ§ОнжаЬсШЁЬиеї, ЖјВЛашвЊУїШЗЕиНЋЬиеїЪфШыЕНЫуЗЈжаЁЃ етБЛГЦЮЊ"ЬиеїбЇЯА"ЁЃ

ЭМ5 ЧАРЁШЫЙЄЩёОЭјТч
УцЯђЩюЖШбЇЯАЕФЯЕЭГЩшМЦ
ЩюЖШбЇЯАзюНќдкШэМўгІгУСьгђШЁЕУСЫГЩЙІ, жївЊЪЧвђЮЊММЪѕВПМўЕФГЩЪь, БШШчгВМўжаЕФМЦЫуФмСІдіЧП, ДѓСПЕФбЕСЗЪ§ОнБЛБъМЧ,
бЇЯАЫуЗЈКЭЭјТчГѕЪМЛЏЗНУцЕФЭЛЦЦ, вдМАПЊЗХдДТыШэМўПђМмЕФПЩгУадЁЃ
ЯТУцЪЧгУЩюЖШбЇЯАЯЕЭГЕФжївЊПМТЧвђЫиЁЃ
ЭиЦЫ
ЩюЖШбЇЯАЪЧвЛИіВЛЖЯЗЂеЙЕФСьгђ, ФПЧАе§дкЪЙгУаэЖрЭјТчЭиЦЫ[1]ЁЃЦфжавЛаЉЭјТчЯдЪОСЫЖдПижЦКЭМрПиЮяСЊЭјгІгУЕФГаХЕ:
ЩюВуЩёОЭјТч(Deep Neural Network, DNN)ЪЧвЛжжЭъШЋСЌНгЕФШЫЙЄЩёОЭјТч,
ОпгааэЖрвўВиВу(вђДЫЩюВу)ЁЃ етаЉЭјТчЪЧМЋКУЕФКЏЪ§БЦНќЦї, Р§Шч, ПЩгУгкЕчСІаавЕжаЕчзгПижЦЕФгІгУЁЃПижЦЯЕЭГЕФЗТецФЃаЭПЩгУгкЪЙгУЩюЖШЭјТчЙЙНЈПижЦЦї,
ВЂЩњГЩбЕСЗЪ§ОнЁЃЭЈЙ§етжжЗНЗЈ, ПЩвдЬНЫїЭЈГЃФбвдЪЙгУДЋЭГЗНЗЈПижЦЕФзДЬЌ(БпНч/НЛВцЬѕМў)
ОэЛ§ЩёОЭјТч(Convolutional Neural Network, МђГЦ CNN)ЪЧРћгУЪфШыаХКХЕФЖўЮЌНсЙЙ,
ШчЪфШыЭМЯёЛђгявєаХКХЁЃвЛИіОэЛ§ЭјТчгЩвЛИіЛђЖрИіОэЛ§Ву(Й§ТЫВу)зщГЩ, ШЛКѓЪЧвЛИіЭъШЋСЌНгЕФЖрВуЩёОЭјТчЁЃ
етаЉЭјТчдкГЩЯёКЭФПБъЪЖБ№жаЕФШБЯнМьВтЕШЮЪЬтЩЯШЁЕУСЫГЩЙІЁЃЫќУЧвВБЛгУгкМнЪЛдБдЎжњЯЕЭГ(ADAS)жаЕФГЁОАЁЃ
бЛЗЩёОЭјТч(Recurrent Neural Network, RNN)ЪЧЛљгкРћгУЫГађ(ЛђРњЪЗ)аХЯЂНјаадЄВтЕФЫуЗЈЁЃетаЉЭјТчгаРћгкЪБМфађСаЗжЮіЁЃДЋЭГЕФЩёОЭјТчМйЩшЫљгаЕФЪфШы(КЭЪфГі)дкЪБМфЛђЕНДяЕФЫГађЩЯЯрЛЅЖРСЂЁЃМЧТМзДЬЌаХЯЂ,
ДцДЂЙ§ШЅЕФаХЯЂ, ВЂЪЙгУЦљНёЮЊжЙМЦЫуГіРДЕФаХЯЂНјааЯТвЛИідЄВтЁЃ дкЮяСЊЭјгІгУжа, RNNгаРћгкбЇЯАРњЪЗааЮЊ,
ВЂгУгкдЄВтЮДРДЕФЪТМў, Р§ШчзЪВњЕФЪЃгрЪЙгУЪйУќЁЃ ГЄЖЬЦкМЧвф(LSTM)ЭјТчвВЪЪгУгкетРргІгУ[2]ЁЃ
ЩюЖШЧПЛЏбЇЯА(DRL)ЖдгкдкИДдгЖЏЬЌЛЗОГжадЫааЕФздЪЪгІПижЦЯЕЭГЪЧгаКУДІЕФЁЃ ПМТЧПижЦдкВжПтВйзїжаВПЪ№ЕФЛњЦїШЫ,
етаЉЛњЦїШЫБиаыЖЏЬЌЕиЪЪгІаТЕФШЮЮёЁЃ вдЧПЛЏбЇЯАЮЊЛљДЁЕФПижЦепбЇЯАвЛЯюШЮЮёЪБ, ЫќУЧЭЈЙ§жДаавЛИіЖЏзї,
ЪЙЫћУЧИќНгНќФПБъЖјЛёЕУЕФНБРјЁЃР§Шч, ПижЦЦїНгЪеРДздЩуЯёЛњЕФЭМЯё, ИУееЦЌЯдЪОСЫЛњЦїШЫЪжБлЕФЕБЧАЮЛжУ,
ВЂРћгУЭМЯёжаЕФаХЯЂРДбЇЯАШчКЮНЋЪжБлвЦНќФПБъ(ЭМ6)[3]ЁЃ ЛљгкDLCЕФПижЦЦїПЩвдЭЈЙ§ЛњЦїШЫФЃФтЦїЛђепЭЈЙ§ЙлВьЪЕМЪЕФЛњЦїШЫРДбЕСЗЁЃ
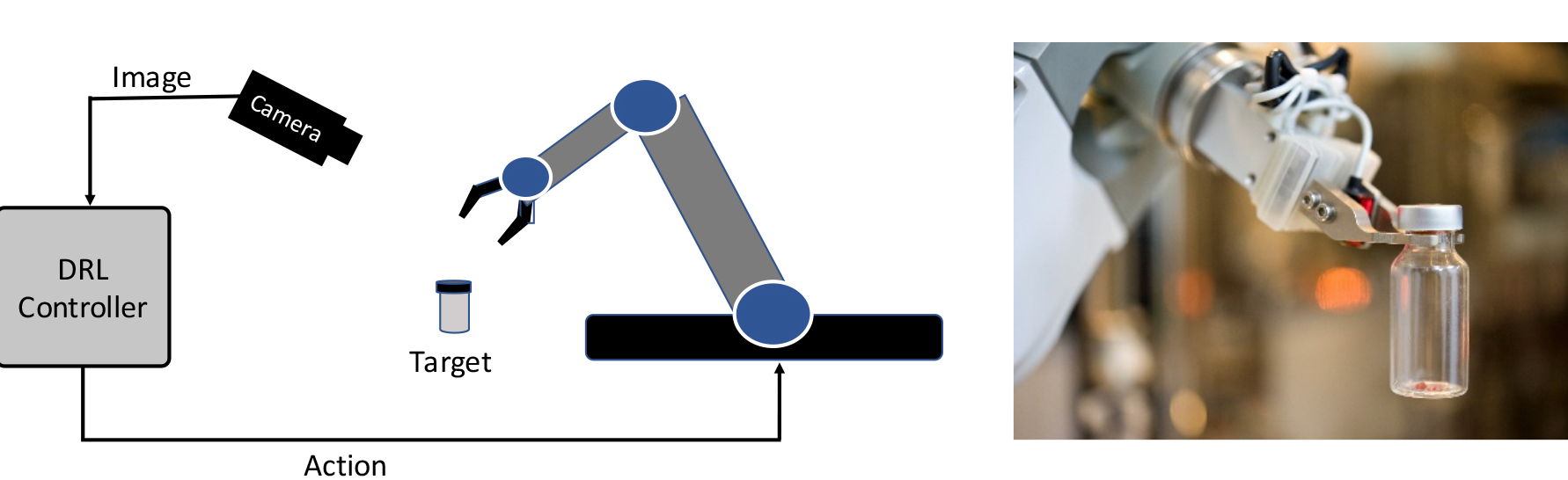
ЭМ6 ЛњЦїШЫПижЦгІгУЕФЩюЖШЧПЛЏбЇЯА
бЕСЗ
DNNашвЊДѓСПЕФбЕСЗЪ§Он, етаЉЪ§ОнзюКУАќРЈРДздбЇЯАЫљашвЊЕФЫљгаВЛЭЌзДЬЌЛђЬѕМўЕФЪ§ОнЁЃЖдгкДѓЖрЪ§гІгУЖјбд,
ЯжгаЪ§ОнжївЊРДздЯЕЭГЕФе§ГЃЙЄзїзДЬЌ, ЦфжаАќРЈДгЦфЫћзДЬЌЛёШЁЕФЩйСПЪ§ОнЁЃ
Ъ§ОндіЧП/ЗКЛЏЪЧвЛжжгУРДИФЩЦЪ§ОнВЛЦНКтЕФММЪѕ, ПЩвдДгЯжгаЕФаЁбљБОМЏПЊЪМ, ЭЈЙ§Ъ§ОнзЊЛЛДДНЈЖюЭтЕФКЯГЩАцБОЃЌЛЙПЩвдЪЙгУИУЯЕЭГЕФФЃФтФЃаЭРДДДНЈбЕСЗЪ§ОнЁЃ
СэвЛИіЬєеНЪЧФбвдЪеМЏбЕСЗетаЉЭјТчЫљашЕФДѓСПЪ§ОнЁЃзЊвЦбЇЯАЪЧПЩвдгУРДЛКНтетИіЮЪЬтЕФЗНЗЈжЎвЛЁЃ ЪЙгУзЊвЦбЇЯА,
ПЩвдДгдЄбЕСЗЕФЩёОЭјТчПЊЪМ(ДѓЖрЪ§ЩюЖШбЇЯАПђМмЬсЙЉСЫПЩвдЯТдиЕФОЙ§ЭъШЋбЕСЗЕФФЃаЭ) , ВЂгУгІгУжаЕФЪ§ОнЖдЦфНјааЮЂЕїЁЃ
гВМў
бЕСЗЩюЖШЭјТчгазХОоДѓЕФДІРэвЊЧѓЁЃGPUвбОГЩЮЊбЕСЗЩюЖШЭјТчЕФжївЊбЁдёЁЃгЩгкМЦЫуадФмИп, ФкДцДѓ,
вдМАБрГЬЙЄОпЕФбЁдё, GPUКмгаЮќв§СІ, МИКѕГЩЮЊбЕСЗЕФБивЊЬѕМўЁЃ
ДЫЭт, FPGAЪЧВПЪ№бЕСЗЭјТчЕФСМКУФПБъЁЃFPGAЬсЙЉСЫИќЕЭЕФбгГй, ИќКУЕФЙІТЪаЇТЪЃЌЬиБ№ЪЧдкЧЖШыЪНЩшБИЩЯВПЪ№етаЉЭјТч,
гУгкгыI/OНєУмВйзїЕФПижЦЯЕЭГЁЃ
ШэМў
ПьЫйВЩгУКЭГЩЙІЕФвЛИідвђЪЧГЩЪьШэМўПђМмЕФПЩгУадЁЃ вЛаЉГЃМћЕФПђМмга TensorFlow, Caffe,
Keras КЭ Computational Network Toolkit (CNTK)[4,5,6,7]ЁЃ
етаЉПђМмжЇГжВЛЭЌЕФВйзїЯЕЭГ, Шч Windows КЭ Linux, вдМА Python КЭ CгябдЁЃ
ДѓЖрЪ§етаЉПђМмЖМгажЇГжЛђЪЕР§РДЪЕЪЉзюаТЕФЩюЖШЭјТчЃЌвВжЇГжGPUЕФЪЙгУЁЃ
ЩюЖШбЇЯА: IoT ПижЦЩшМЦЕФаТЗНЯђ
ЩюЖШбЇЯАЪЧШЫЙЄжЧФмСьгђжавЛИіСюШЫаЫЗмЕФаТЗНЯђ, вВЪЧНтОіЙЄвЕПижЦЩшМЦгІгУжавЛИігаЧАЭОЕФММЪѕЁЃ
ПьЫйПЊЪМеЦЮеЩюЖШбЇЯАЕФЗНЗЈЪЧЯТдиЧАУцЬсЕНЕФПЊдДПђМм, ВЂЧвгУНЬГЬЪОР§НјааЪЕбщЁЃ ДгвЛИіРрЫЦгкгІгУГЬађЕФЪОР§ПЊЪМ,
ШЛКѓЪЙгУзЊвЦбЇЯАРДПьЫйВйзїЁЃ
|









