| БрМЭЦМі: |
БОЮФгкexbot,ЭЈЙ§ROSжаЕФгІгУЙІФмЗжРрЃКЕзВуЧ§ЖЏЃЌ
ЩЯВуЙІФмЃЌПижЦФЃПщЃЌГЃгУзщМўВЂОпЬхЗжЮіЁЃ
|
|
вЛЁЂЕзВуЧ§ЖЏ
ЛњЦїШЫПЊЗЂЪЧвЛИіШэгВМўНсКЯЕФСьгђЃЌГЃГЃашвЊЩцМАКмЖрДЋИаЦїЁЂжДааЦїЕФЧ§ЖЏЁЃГЃгУЕФгВМўвЛАуЖМПЩвддкROSжаевЕНЦЅХфЕФЧ§ЖЏЙІФмАќЃЌР§ШчДЋИаЦїПЩвдВЮПМwikiЩЯЕФетИіСаБэЃК
http://wiki.ros.org/Sensors
еыЖдГЃгУЕФUSBЩуЯёЭЗЃЌROSжагаusb_camЁЂuvc_cameraЕШЙІФмРрЫЦЕФЧ§ЖЏАќЃЌдЫааЛЙЫуБШНЯЮШЖЈЁЃЮвУЧгУusb_camЧ§ЖЏ1080PЕФЩуЯёЭЗзіЪЖБ№ЃЌгаЕФЪБКђСЌајдЫааКУМИЬьЖМВЛЛсГіЮЪЬтЃЌВЛЙ§ХМЖћвВЛсФЊУћЦфУюЕФЙвЕєЁЃ

вЛаЉЫХЗўЕФЧ§ЖЏдкROSЕБжавВПЩвдевЕНЃЌБШШчdynamixelЕФЫХЗўЃЌKungfu ArmЧАЖЫЕФСщЧЩЪжЪЙгУЕФОЭЪЧdynamixelЃЌЯрЙиЕФЙІФмАќЪЧdynamixel_motorЁЃгУROSЧ§ЖЏЦ№РДШЗЪЕМђЕЅвзгУЃЌЕЋЪЧдЫааЪБМфГЄСЫЃЌЛЙЪЧЛсгаЮЪЬтЁЃгавЛДЮИјKungfu
ArmТМЯёЃЌЪжОЭгаЕуНєеХСЫЃЌЪжжИВЛЬ§ЪЙЛНЃЌАбПЊЫЎШїСЫвЛзРзгЃЌЧ§ЖЏвВУЛгаШЮКЮБЈДэаХЯЂЃЌжиЦєжЎКѓдйвВУЛгажиЯжРрЫЦЕФЯжЯѓЁЃ

ROSжЇГжЕФКмЖрЛњЦїШЫЃЈPR2ЁЂKUKAЁЂshadow handЕШЃЉЖМЪЙгУЕНСЫвЛжжЪЕЪБЙЄвЕвдЬЋЭјзмЯпЁЊЁЊEtherCATЁЃEtherCATБОЩэОЭгаПЊдДЕФавщЪЕЯжЗНЪНЃЌROSНЋПЊдДПтМЏГЩЮЊЙІФмАќЁЊЁЊethercat_soemЃЌПЩвддкКмЖрЛњЦїШЫЕФШэМўдДжаПДЕНЁЃЮвУЧдкЯюФПЕФГѕЦквВЪЙгУЙ§етжжЗНЪНЃЌЧ§ЖЏЪЧУЛгаЮЪЬтЃЌЕЋЪЧЮШЖЈадЁЂЪЕЪБадЁЂЙІФмЗНУцЃЌЖМЛЙДцдквЛаЉЮЪЬтЁЃ
ОЭИіШЫИаЪмЖјбдЃЌROSжаЕзВуЧ§ЖЏЯрЙиЕФЙІФмАќЃЌДѓВПЗжЖМЪЧЖдвбгаПЊдДЧ§ЖЏЕФМЏГЩЗтзАЃЌЬэМгЭГвЛЕФROSНгПкЃЌЫљвдЮШЖЈаджївЊКЭдБОЕФЧ§ЖЏЯрЙиЃЌЭЌЪБЛЙвЊПМТЧROSЭЈаХЛњжЦЕФгАЯьЁЃ
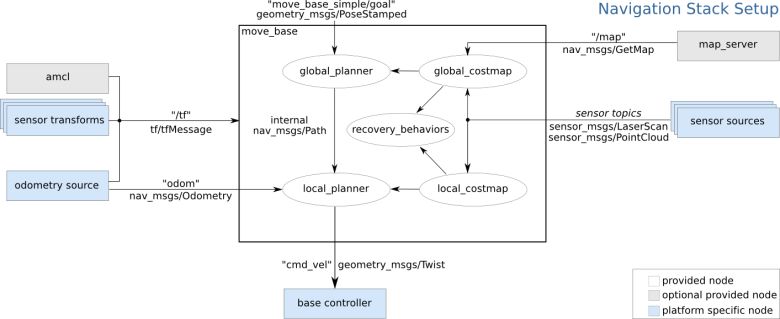
ЖўЁЂЩЯВуЙІФм
ЩЯВуЙІФмЪЧROSзюЮЊЩУГЄЕФвЛИіСьгђЃЌПЩвдЬсЙЉжкЖрЛњЦїШЫЕФгІгУЙІФмЃКSLAMЁЂЕМКНЁЂЖЈЮЛЁЂЭМЯёДІРэЁЂЛњаЕБлПижЦЕШЕШЃЌетИіВПЗжЯъЯИеЙПЊЙЛЫЕШ§ЬьШ§вЙСЫЁЃЮвОЭеыЖдСНИіВПЗжЬИвЛЯТздМКЕФПДЗЈЁЃ
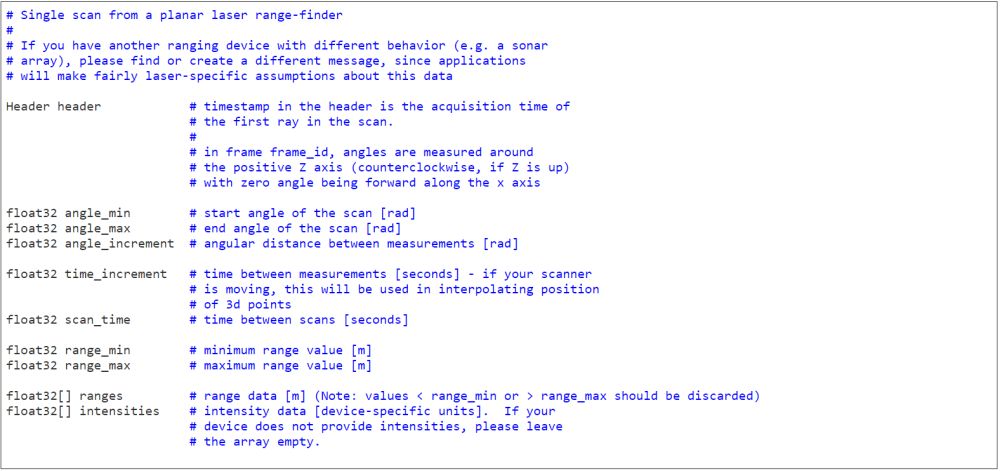
1. ЛњЦїШЫЕМКН
ЯждкКмЖрбЇаЃЛђепЙЋЫОзіЛњЦїШЫЕМКНЕФЪБКђЃЌЖМЛсЛљгкROSПЊЗЂЁЃ
ROSЕФетЬзЕМКНПђМмШЗЪЕКУгУЃЌКмПьОЭПЩвддкЛњЦїШЫЩЯАбЙІФмХмЦ№РДЃЌЖјЧвЛљБОВЛЛсЩцМАЬЋЖрБрТыЃЌЕЋЪЧЛЙУЛРДЕУМАИпаЫЃЌЮЪЬтОЭГіЯжСЫЃКЯжЪЕКЭРэЯыЛЙЪЧгаКмДѓВюОрЕФЃЌЙІФмЪЕЯжЕФаЇЙћПЩФмдЖдЖДяВЛЕНЮвУЧЕФашЧѓЃЌИќБ№ЬсВњЦЗЛЏгІгУСЫЁЃ
ШЛКѓОЭЪЧЕїећЙІФмНкЕуЕФИїжжВЮЪ§ЃЌЫфШЛПЩвдгаЫљИФЩЦЃЌЕЋЪЧИњзюжеЕФгІгУЛЙЪЧЛсгаКмДѓВюОрЁЃЪЙгУROSПьЫйПЊЗЂКѓЕФаЫЗмЃЌдкетИіЪБКђОЭБЛЦУСЫвЛХшСЙЫЎЁЃ
ROSжаЕФЙІФмАќвЛАуЖМЪЧвЛаЉЭЈгУЕФЙІФмЃЌВЛЬЋПЩФмЭъШЋЪЪХфЮвУЧздМКЕФЛњЦїШЫЃЌЫљвдВњЩњИїжжЮЪЬтвВЪЧЧщРэжЎжаЁЃНтОіЕФАьЗЈОЭЪЧЃКЮвУЧВЛФмЬЋвРРЕROSжаЕФзЪдДЃЌКЫаФЮЪЬтЛЙЪЧашвЊздМКНтОіЃЌЛђепеыЖдздМКЕФЛњЦїШЫПЊЗЂЯрЙиЕФЙІФмЃЌЛђепгХЛЏвбгаЕФROSзЪдДЁЃ
дкKungfu ArmЕФПЊЗЂЙ§ГЬжаЃЌЮвУЧжЛгУСЫАыФъЪБМфОЭРћгУROSАбЛњЦїШЫЙІФмдаЭДюНЈЦ№РДСЫЃЌЕЋЪЧЮЪЬтЖрЖрЃЌНгЯТРДЕФгХЛЏПЊЗЂгУСЫвЛФъЖрЕФЪБМфЃЌЯждкЛЙдкГжајЕФЕќДњЁЃ
2. MoveItЛњаЕБлПижЦ
MoveItЪЧROSЕБжаеыЖдЛњаЕБлПижЦЕФдЫЖЏЙцЛЎЦНЬЈЃЌМЏГЩСЫЛњаЕБлдЫЖЏЙцЛЎЁЂБмеЯЙцЛЎЁЂдЫЖЏбЇМЦЫуЕШЙІФмФЃПщЁЃКЭROSжаЕФЕМКНЙІФмВюВЛЖрЃЌгУmoveitДюНЈвЛИіМђЕЅЕФЛњаЕБлПижЦЯЕЭГВЛФбЃЌецЕФвЊШЅЪЕЯжвЛИіВњЦЗЛЏЕФПижЦЯЕЭГОЭИДдгСЫЁЃ
етЪЧЮвУЧЛљгкROSПЊЗЂЕФЙЄвЕЛњЦїШЫПижЦЯЕЭГЃЌВЛНіАбROSКЫаФЭЈаХЛњжЦХзРыСЫЃЌЖјЧвЛЙеыЖдmoveitЁЂomplЁЂfastikЕШЙІФмАќНјааСЫДњТыМЖЕФгХЛЏКЭаоИФЃЌДѓМвПЩвдВЮПМзЈУХНщЩметПюЛњЦїШЫЕФЮФеТЃК
ЙІЗђЪжЃКвЛПюЛљгкROSЕФЙЄвЕЛњЦїШЫЁЃ
змЖјбджЎЃЌROSжаЗсИЛЕФЩЯВугІгУзЪдДЃЌЖдЛњЦїШЫВњЦЗЛЏЕФЪЕЯжЛЙЪЧгаКмДѓАяжњЕФЃЌвЛЗНУцПЩвдРћгУетаЉЙІФмАќПьЫйЭъГЩдаЭПЊЗЂЃЌСэвЛЗНУцвВПЩвдДгетаЉдДТызЪдДжаЛёЕУСщИаЁЃ
Ш§ЁЂПижЦФЃПщ
ЗсИЛЕФЩЯВузЪдДзюжеЛЙЪЧвЊТфЪЕЕНЛњЦїШЫЩЯЃЌдкЛњЦїШЫПижЦВПЗжЃЌROSЬсЙЉСЫвЛИіПижЦПђМмЁЊЁЊros_controlЃЌЭЌЪБЛЙгаКмЖрГЃгУЕФПижЦЦїЁЊЁЊros_controllersЁЃ

ros_controlЪЧROSЮЊПЊЗЂепЬсЙЉЕФЛњЦїШЫПижЦжаМфМўЃЌАќКЌвЛЯЕСаПижЦЦїНгПкЁЂДЋЖЏзАжУНгПкЁЂгВМўНгПкЁЂПижЦЦїЙЄОпЯфЕШЕШЃЌПЩвдАяжњЛњЦїШЫгІгУЙІФмАќПьЫйТфЕиЃЌЬсИпПЊЗЂаЇТЪЁЃ
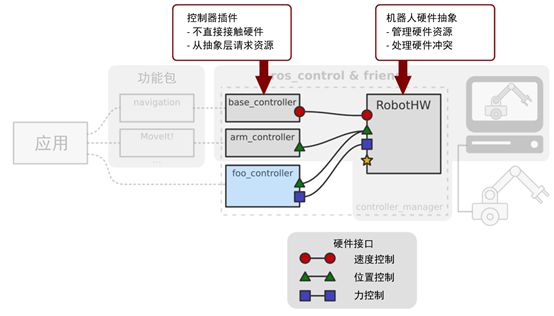
еыЖдВЛЭЌРраЭЕФЛњЦїШЫЃЈвЦЖЏЛњЦїШЫЁЂЛњаЕБлЕШЃЉЃЌros_controlПЩвдЬсЙЉЖржжРраЭЕФПижЦЦїЃЈcontrollerЃЉЃЌЕЋЪЧетаЉПижЦЦїЕФНгПкИїВЛЯрЭЌЁЃ
ЮЊСЫЬсИпДњТыЕФИДгУТЪЃЌros_controlЛЙЬсЙЉвЛИігВМўГщЯѓВуЃЌИКд№ЛњЦїШЫгВМўзЪдДЕФЙмРэЃЌЖјcontrollerДгГщЯѓВуЧыЧѓзЪдДМДПЩЃЌВЂВЛжБНгНгДЅгВМўЁЃ
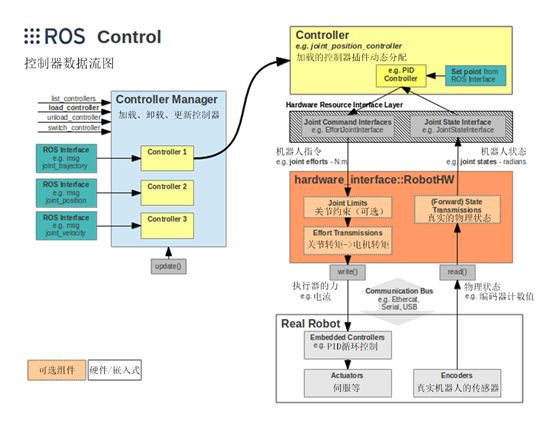
1. ПижЦЦїЙмРэЦїЃЈController ManagerЃЉ
УПИіЛњЦїШЫПЩФмгаЖрИіПижЦЦїЃЈcontrollerЃЉЃЌЫљвдетРягавЛИіПижЦЦїЙмРэЦїЕФИХФюЃЌЬсЙЉвЛжжЭЈгУЕФНгПкРДЙмРэВЛЭЌЕФПижЦЦїЁЃПижЦЦїЙмРэЦїЕФЪфШыОЭЪЧROSЩЯВугІгУЙІФмАќЕФЪфГіЁЃ
2. ПижЦЦїЃЈControllerЃЉ
ПижЦЦїПЩвдЭъГЩУПИіjointЕФПижЦЃЌЖСШЁгВМўзЪдДНгПкжаЕФзДЬЌЃЌдйЗЂВМПижЦУќСюЃЌВЂЧвЬсЙЉPIDПижЦЦїЁЃ
3. гВМўзЪдДЃЈHardware RescourceЃЉ
ЮЊЩЯЯТСНВуЬсЙЉгВМўзЪдДЕФНгПкЁЃ
4. ЛњЦїШЫгВМўГщЯѓЃЈRobotHWЃЉ
ЛњЦїШЫгВМўГщЯѓКЭгВМўзЪдДжБНгДђНЛЕРЃЌЭЈЙ§writeКЭreadЗНЗЈЭъГЩгВМўВйзїЃЌетвЛВувВАќКЌЙиНкдМЪјЁЂСІОизЊЛЛЁЂзДЬЌзЊЛЛЕШЙІФмЁЃ
5. ецЪЕЛњЦїШЫЃЈReal RobotЃЉ
ецЪЕЛњЦїШЫЩЯвВашвЊгаздМКЕФЧЖШыЪНПижЦЦїЃЌНЋНгЪеЕНУќСюЗДгГЕНжДааЦїЩЯЃЌБШШчНгЪеЕНа§зЊ90ЖШЕФУќСюКѓЃЌОЭашвЊШУжДааЦїПьЫйЁЂЮШЖЈЕФа§зЊ90ЖШЁЃ
ЙигкШчКЮЪЙгУros_controlПижЦвЛПюЪЕЬхЛњЦїШЫЃЌДѓМвПЩвдВЮПМhans-robotЗЂВМЕФвЛПюcute_robotЃК
https://github.com/hans-robot/cute_robot
гІгУЙІФмжаЕФПижЦФЃПщЬсЙЉСЫВЛЩйПижЦЦїЃКЮЛжУПижЦЦїЁЂЙьМЃПижЦЦїЁЂСІПижЦЦїЁЂЫйЖШПижЦЦїЕШЕШЃЌетаЉПижЦЦїЕФПђМмЩшМЦКЭДњТыЪЕЯжЃЌЖМПЩвдгУгкздМКЕФЛњЦїШЫПЊЗЂжаЁЃ
ЫФЁЂГЃгУзщМў
гІгУЙІФмжаЛЙгавЛаЉГЃгУФЃПщЃЌетРяЮвАбЫћУЧЭГГЦЮЊГЃгУзщМўЃЌБШШчTFЁЂURDFЁЂMessageЕШЁЃ
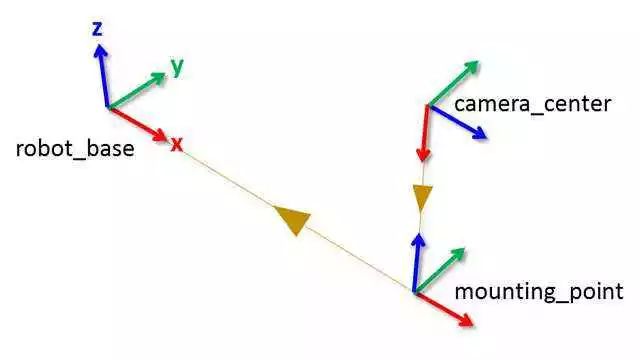
TFЪЧROSжаЗЧГЃживЊЕФвЛИіВПЗжЃЌПЩвдИљОнЛњЦїШЫЯЕЭГжаЕФзјБъЯЕДДНЈвЛПУTFЪїЃЌШЛКѓАяжњПЊЗЂепЭъГЩзјБъЯЕжЎМфЕФБфЛЛЁЃдкROSЯЕЭГжаЃЌTFЪЧЭЈЙ§ЙуВЅКЭМрЬ§ЕФЗНЪНВйзїЕФЃЌетжжЗНЗЈдкИДдгЛњЦїШЫЯЕЭГжаЛсВњЩњКмЖрШпграХЯЂЃЌаЇТЪВЛИпЁЃ
ХйГ§ЩЯВуЕФЙуВЅКЭМрЬ§ЗтзАЃЌTFЕФФкКЫЦфЪЕгыROSВЂУЛгаЙиЯЕЃЌЖјЪЧвЛИіЭъГЩзјБъдЫЫуЕФЪ§бЇПтЁЃдкЮвУЧЕФЯюФППЊЗЂжаЃЌПЩвджБНгСДНгTFЕФЕзВуЪ§бЇПтЃЌАяжњЭъГЩашвЊЕФзјБъБфЛЛЃЌKungfu
ArmЕФе§ЯђдЫЖЏбЇОЭЪЙгУЕНСЫTFЪ§бЇПтЁЃ
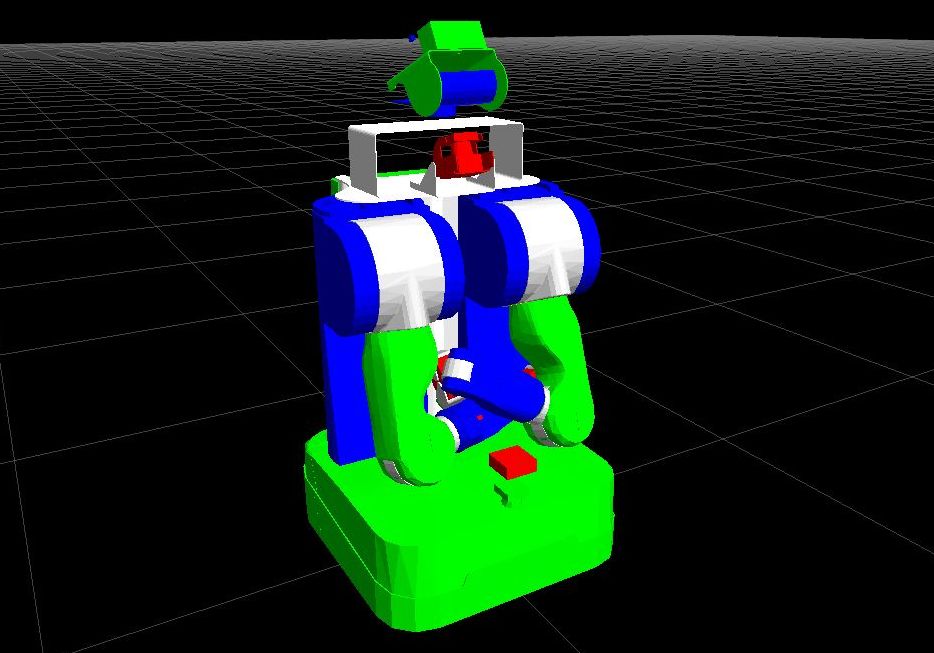
URDFЪЧROSжаЪЕЯжЛњЦїШЫНЈФЃЕФживЊЙЄОпЃЌКмЖрЩЯВуЙІФмЕФЫуЗЈЪЕЯжЃЌЖМвРРЕгкЛњЦїШЫЕФURDFФЃаЭЃЌЫљвдШчЙћжБНгвЦжВROSжаЕФЙІФмАќдДТыЃЌURDFФЃаЭВПЗжЛЙЪЧашвЊЮЌЛЄЕФЁЃ
ROSЮЊЛњЦїШЫЬсЙЉСЫвЛИіЭГвЛЕФЦНЬЈЃЌКмживЊЕФвЛИіВПЗжОЭЪЧЖЈвхСЫвЛЯЕСаБъзМЕФНгПкЃЌетаЉНгПкЕФЖЈвхгыROSЯЕЭГЕФЭЈаХЛњжЦУЛгаЙиЯЕЃЌЭъШЋПЩвддкГЬађжаЕїгУЃЌетбљВЛНіУтШЅСЫжиИДЖЈвхЕФЮЪЬтЃЌЛЙПЩвдБЃГжКЭROSЭГвЛЕФНгПкЁЃ
БОЦЊЧГЬИСЫROSгІгУЙІФмдкЛњЦїШЫВњЦЗЛЏПЊЗЂЕБжаЕФгІгУЃЌетЪЧROSжазЪдДзюЮЊЗсИЛЕФвЛИіВПЗжЃЌВЛНіПЩвдАяжњЮвУЧПьЫйДюНЈЙІФмдаЭЃЌбщжЄЩшМЦЩЯЕФЮЪЬтЃЌЭЌЪБЛЙПЩвдНшжњПЊдДДњТыЃЌжњСІКѓајЕФЙІФмПЊЗЂЃЌОјЖдЪЧЛњЦїШЫПЊЗЂЕФгХжЪзЪдДЁЃ
|









