| 编辑推荐: |
本文从 Cache基础讲起,然后逐一拆解AUTOSAR CP多核实施的四大核心机制: Multi-Core OS、IOC、SpinLock、ActivateTaskAsynchronous ,最后用一个完整流程把四者串起来,希望对你的学习有帮助。
本文来自于嘉宋说汽车,由火龙果软件Alice编辑,推荐。 |
|
本文从 Cache基础 讲起(这是理解所有多核软件问题的物理根基),然后逐一拆解AUTOSAR CP多核实施的四大核心机制: Multi-Core OS、IOC、SpinLock、ActivateTaskAsynchronous ,最后用一个完整流程把四者串起来。
读完这篇,你不仅能看懂多核AUTOSAR配置,还能避开项目里最常见的多核踩坑。
一、铺垫:Cache,多核软件问题的物理根源
要理解AUTOSAR CP多核软件,必须先理解Cache。这不是"额外知识",而是 所有多核软件问题的物理根源 ——不理解Cache,IOC、 SpinLock 、跨核通信你永远只能"记住结论",无法"理解为什么"。
1.1 为什么需要Cache?
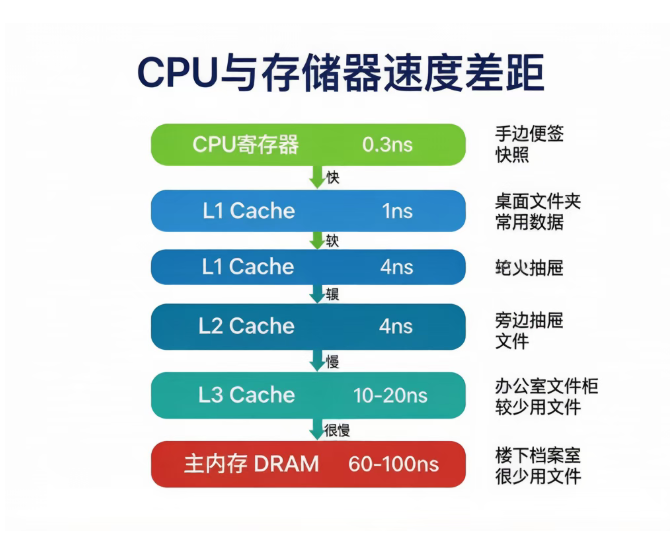
CPU的速度和内存的速度差距极大,这是一个根本性的物理矛盾:
CPU与存储器的速度差距
| 组件 |
访问延迟 |
类比 |
| CPU寄存器 |
0.3 ns |
手边的便签 |
| L1 Cache |
1 ns |
桌面上的文件夹 |
| L2 Cache |
4 ns |
旁边的抽屉 |
| L3 Cache |
10~20 ns |
办公室的文件柜 |
| 主内存(DRAM) |
60~100 ns |
楼下档案室 |
CPU每执行一条指令,如果都要去"楼下档案室"取数据,等待时间会让CPU 99%的时间都在空转。 Cache的本质 :把"近期用过"和"可能马上要用"的数据,提前搬到CPU身边的"小仓库"里,CPU直接从小仓库取,不用每次跑楼下。
关键概念:Cache Line(缓存行)
Cache不是一个字节一个字节搬的,而是 整块整块搬 ——每次搬 64 字节 (ARM Cortex-A/M通常是32或64字节),这叫一个 Cache Line 。
类比 :去档案室取资料,不是只拿一张纸,而是把整个文件夹都带回来——反正一个项目的资料往往是连着用的,一次多拿几张反而更快。 |
1.2 写操作:Write-Back( 回写策略 )
这是最常见的Cache策略,也是多核问题的根源:
Write-Back(回写)策略:
CPU写数据 → 只写到L1 Cache(快,1ns)
→ 不立刻更新主内存
→ 主内存里的值还是旧的!
→ 只有这个Cache Line被"换出"时,才把数据真正写回主内存 |
问题来了:如果另一个核也在读同一块内存地址,它读到的是自己Cache里的旧值,不是最新值。
1.3 多核Cache不一致问题
这是整篇文章最重要的一个场景,务必理解:
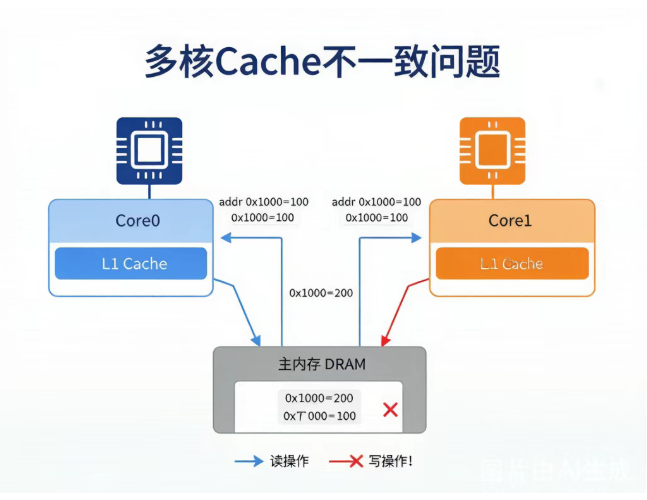
场景:两个核各有自己的L1 Cache
初始状态: 主内存 addr 0x1000 = 100
Step 1: Core0 把 addr 0x1000 读到自己的L1 Cache,值是 100
Step 2: Core1 把 addr 0x1000 读到自己的L1 Cache,值也是 100
Step 3: Core0 写 addr 0x1000 = 200(只写到Core0的L1 Cache)
此刻三个地方的值:
→ Core0的L1 Cache:0x1000 = 200 ← 新值
→ Core1的L1 Cache:0x1000 = 100 ← 旧值,脏了!
→ 主内存:0x1000 = 100 ← 也是旧值
Core1读到的是100,但实际值是200——Cache不一致(Cache Incoherence)。 |
1.4 两种解决方案
方案A:硬件Cache一致性(SMP的做法)
在多核 SMP 处理器里(比如4×A55的MPU侧),硬件实现了 MESI协议 (一种监听总线的机制):
Core0写 0x1000 = 200
→ 硬件自动广播「0x1000被我改了!」
→ Core1收到广播 → 自动把自己L1 Cache里0x1000那行标记为「无效」
→ Core1下次读0x1000 → Cache Miss → 重新从内存取到200 ✅ |
对软件完全透明 ,工程师感知不到这个过程。这就是为什么Linux/QNX跑SMP不需要手动处理Cache。
代价:MESI需要额外的总线带宽和硬件电路,核越多成本越高。
方案B:软件手动管理(AUTOSAR CP MCU侧的做法)
Cortex-M7 (S32G2的MCU侧)核间 没有 硬件Cache一致性。AUTOSAR的IOC通过两个指令解决:
Flush(清除/清洗): 把Cache里的数据 强制写回内存
→ Core0写完数据后:DSB + D-Cache Flush
→ 强制把Core0 L1 Cache里的新值写回主内存
Invalidate(使无效): 强制下次 从内存重新读取
→ Core1读数据前:D-Cache Invalidate
→ 把Core1 L1 Cache里这个地址的数据标为无效
→ 下次Core1读时,强制从主内存取(取到Core0写的新值) |
Flush 和 Invalidate 必须配合,缺一不可
| 步骤 |
谁做 |
时机 |
遗漏的后果 |
| Flush |
发送方(Core0) |
写完数据后、通知Core1前 |
Core1读到的还是主内存旧值 |
| Invalidate |
接收方(Core1) |
读数据前 |
Core1读到自己Cache里的旧值 |
AUTOSAR IOC的内部实现把Flush + 内存屏障(DMB/DSB)都封装好了,所以工程师只用调 IocSend() 就够了。
1.5 I-Cache 和 D-Cache
Cache其实分两种,分开讲就清楚了:
I-Cache(Instruction Cache)vs D-Cache(Data Cache)
| 对比 |
I-Cache(指令Cache) |
D-Cache(数据Cache) |
| 存的是什么 |
程序指令(编译后的机器码) |
变量、数组、结构体等 数据 |
| 谁访问 |
CPU取指单元(自动,无感知) |
CPU读/写数据时 |
| 多核一致性问题 |
较少(代码不变,大家都一样) |
主要问题来源 |
所以昨天说的Flush和Invalidate,都是针对 D-Cache 。I-Cache也有Invalidate,但场景特殊(OTA刷写程序时才用到)。日常AUTOSAR开发遇到的Cache问题,99%都是D-Cache的问题。 二、AUTOSAR CP Multi-Core OS 架构
Cache基础讲完了,现在进入正题:AUTOSAR CP在多核硬件上,OS是怎么组织的?
2.1 一个OS,还是多个OS?
AUTOSAR CP多核的设计是: 每个核有自己独立的OS实例 。
这不是一个OS管多个核(那是SMP的Linux做法),而是:
Core0 → OS实例0(独立调度器、独立任务列表、独立栈)
Core1 → OS实例1(独立调度器、独立任务列表、独立栈)
类比 :不是一个大厨房主管统管两个厨师,而是 两个厨房各有一个主管,他们用对讲机协调 。 |
这个设计和Linux SMP有本质区别,根源在于 汽车实时性的要求 :任务必须在确定的时间内完成,不能因为"OS把我的任务调度到了另一个核"导致Cache状态不可预测。
2.2 启动流程:谁先跑起来?
多核芯片上电后, 硬件决定哪个核先启动 (通常是Core0,叫"主核/Boot Core"):
// 上电后:
Core0 先启动(硬件决定)
→ main() 初始化基础BSW
→ StartCore(CoreID_1, &entry_Core1) // 唤醒Core1
→ StartOS(AppMode) // Core0的OS开始调度
Core1(被唤醒后)
→ 进入 entry_Core1()
→ StartOS(AppMode) // Core1的OS开始调度
|
两个 StartOS() 各自独立跑起来,之后Core0和Core1的任务 并行执行 。
2.3 Task如何分配到核?
全部通过配置(ARXML), 静态绑定,不能运行时改变 :
<!-- ARXML配置示例 -->
<OS-TASK>
<SHORT-NAME>Task_SafetyControl</SHORT-NAME>
<OS-APPLICATION-REF>App_Safety</OS-APPLICATION-REF>
<CORE-AFFINITY>0</CORE-AFFINITY> <!-- 绑定到Core0 -->
</OS-TASK>
|
工程师用工具(Vector DaVinci、EB Tresos)配置,生成代码后这个绑定就固化了。
关键约束(必须理解)
| 约束 |
说明 |
| 一个Task只能跑在一个核上 |
不能漂移,不能运行时迁移 |
| 优先级只在本核内有意义 |
Core0优先级10 vs Core1优先级10互相无关 |
| 跨核通信必须用IOC |
不能直接访问另一个核的全局变量(Cache问题) |
三、IOC:核间通信的正规渠道
理解了Cache问题,就能理解为什么需要IOC。很多工程师会想:两个核共享内存,我直接写一个全局变量不就行了?
3.1 为什么不能直接共享全局变量?
坑一:Cache不一致
Core0写的数据在Core0的D-Cache里,Core1读的还是旧内存值 → Core1永远读到脏数据。
坑二:原子性破坏
Core0写32字节结构体时,Core1中途读 → 读到半新半旧的破损数据。 |
AUTOSAR的解决方案是 IOC(Inter-OS-Application Communication) ——一套OS托管的跨核通信机制,把Cache刷写、内存屏障、原子保护 全部封装好 。
3.2 IOC的两种通信模式
模式一:Sender / Receiver(最常用)
就像传递一个信封:Core0写进去,Core1读出来。
// Core0侧(发送方):
IocSend_VehicleSpeed(speedValue); // 写入IOC缓冲区,OS自动处理cache flush
// Core1侧(接收方):
Std_ReturnType ret = IocReceive_VehicleSpeed(&localSpeed);
if (ret == IOC_E_OK) {
// 用localSpeed做计算
}
|
模式二:Group(多个信号打包发送)
一次发多个变量, 保证一致性 (要么全新,要么全旧,不会部分更新):
// 定义Group:把车速、档位、踏板开度打包
IocWrite_Group_VehicleState(speed, gear, pedalPos);
IocSend_Group_VehicleState(); // 一次性发送,保证原子性
|
3.3 IOC、全局变量、COM 对比
三种跨核/跨ECU通信方式对比
| 对比维度 |
直接全局变量 |
IOC |
COM(信号) |
| 跨核安全 |
❌(Cache问题) |
✅ |
N/A(ECU间) |
| 性能开销 |
最低 |
低 |
高(协议栈) |
| 使用场景 |
同核内 |
跨核、同片 |
跨ECU |
| AUTOSAR规范 |
不是规范机制 |
OS Spec |
COM Spec |
四、SpinLock:跨核临界区保护
IOC解决了"数据怎么传"的问题,但还有一种场景: 两个核需要操作同一块共享内存 (比如一个环形缓冲区),怎么保证互不干扰?
4.1 为什么普通Resource(OS Mutex)不够用?
AUTOSAR CP有Resource机制(类似互斥锁),但它 只保护同一个核内的并发访问 。
问题:如果Core0和Core1都需要操作同一块共享内存,Resource解决不了——因为它只管本核的抢占调度,对另一个核的CPU完全无感。
SpinLock(自旋锁) 是跨核互斥的解决方案。
4.2 SpinLock工作原理
底层是处理器的 原子指令 (ARM的LDREX/STREX,AURIX的CMPSWAP):
// 伪代码:SpinLock获取过程
Core0: LDREX [lock_addr] → 读当前值(0=空闲,1=占用)
STREX [lock_addr] = 1 → 尝试写1
→ 如果写成功:获得锁 ✅
→ 如果写失败:loop回LDREX再试("自旋"等待)⏳
|
"自旋"这个词就来自这里——拿不到锁的核 原地打转循环等待 ,而不是休眠。
实际使用AUTOSAR API:
// AUTOSAR API使用:
GetSpinlock(SpinlockId_SharedBuffer); // 尝试获取锁,拿不到就spin等待
// ── 临界区 ──
SharedBuffer[idx] = newData;
idx++;
// ──────────
ReleaseSpinlock(SpinlockId_SharedBuffer); // 释放锁,另一个核可以获得
|
4.3 SpinLock最危险的坑:死锁
死锁场景一:自旋等待时高优先级任务抢占
问题场景:
Core0 Task_Low(低优先级)获得SpinlockA
→ 被Task_High(高优先级)抢占
Core0 Task_High需要SpinlockA → 开始spin
→ Task_High占着CPU,Task_Low永远无法被恢复执行
→ DEADLOCK(死锁)
|
AUTOSAR的规避方式 : GetSpinlock() 调用时OS会 锁定本核调度器 (不允许更高优先级任务抢占),等释放SpinLock后才恢复。所以持有SpinLock期间,本核不会被抢占。
代价 :持有SpinLock时相当于关了本核的抢占, 临界区必须尽可能短!
死锁场景二:多个SpinLock嵌套,顺序不一致
Core0: GetSpinlock(A) → GetSpinlock(B)
Core1: GetSpinlock(B) → GetSpinlock(A)
→ Core0持有A,等B
Core1持有B,等A
→ 死锁 💀
|
AUTOSAR的规避方式 :AUTOSAR OS支持配置 SpinLock顺序约束 ,工具(DaVinci/EB)会检查是否存在循环依赖。实际项目里规则很简单: 全项目统一SpinLock获取顺序,严格按编号从小到大获取 。
4.4 GetSpinlock vs TryToGetSpinlock
两种SpinLock获取API对比
| API |
行为 |
适用场景 |
| GetSpinlock |
一直spin直到获取成功 |
必须要获取,等多久都行 |
| TryToGetSpinlock |
立即返回,成功或失败 |
可以做备用逻辑的场景 |
// TryToGetSpinlock 示例:
TryToGetSpinlockType result;
TryToGetSpinlock(SpinlockId_Log, &result);
if (result == TRYTOGETSPINLOCK_SUCCESS) {
WriteLog(data);
ReleaseSpinlock(SpinlockId_Log);
} else {
// 锁被另一个核持有,这次不写日志,下次再试
DropLogEntry();
}
|
五、ActivateTaskAsynchronous:跨核激活任务
SpinLock保护了共享内存,IOC传递了数据,但还有一个需求: Core0上的事件触发了,需要让Core1去执行某个任务 ——怎么跨核"叫醒"对方的任务?
5.1 普通ActivateTask vs 跨核版本
同核激活(同步) :
// Core0上的任务激活Core0的另一个任务
ActivateTask(Task_B); // 立即把Task_B放入Core0的就绪队列
// 如果Task_B优先级更高,当前任务被立即抢占
|
跨核激活(异步) :
// Core0激活Core1上的Task_SafetyMonitor
ActivateTaskAsynchronous(Task_SafetyMonitor);
// Core0继续往下执行(不等Core1响应)
// Task_SafetyMonitor会在下一次Core1 OS调度时被放入就绪队列
|
5.2 内部流程
Core0(调用方):
ActivateTaskAsynchronous(Task_SafetyMonitor)
→ 写激活请求到跨核邮箱(共享SRAM)
→ 发IPI(核间中断)给Core1
→ 立即返回,继续执行
Core1(响应方):
← 收到IPI(核间中断)
→ 进入OS ISR
→ 从跨核邮箱读取:哪个任务需要激活
→ 把Task_SafetyMonitor放入Core1就绪队列
→ 调度器下次运行时执行Task_SafetyMonitor
|
关键认知:
| 这里的 "异步" 是相对Core0而言的——Core0发完请求就走了,Core1何时真正执行Task_SafetyMonitor取决于Core1的调度时机,有一定延迟(通常 < 1个OS Tick)。 |
5.3 典型使用场景
场景:Core0(网关Core)收到刹车信号,通知Core1(安全Core)进行紧急处理
// Core0(Gateway处理)
TASK(Task_CanRxGateway) {
// 接收到刹车踏板信号
if (brakeSignal > THRESHOLD) {
// 通知Core1做安全响应(Core1跑的是Lockstep Core,ASIL-D)
ActivateTaskAsynchronous(Task_BrakeSafetyResponse);
}
TerminateTask();
}
// Core1(安全处理)
TASK(Task_BrakeSafetyResponse) {
// 执行ASIL-D安全逻辑
BrakeActuator_Apply(calculatedForce);
TerminateTask();
}
|
5.4 SetEventMultiCore:异步唤醒等待中的任务
除了激活任务,还可以跨核发事件(适合"生产者-消费者"模式):
// Core0唤醒Core1上WaitEvent中的任务
SetEventAsynchronous(Task_Core1_WaitingTask, EventMask_DataReady);
|
适用场景:Core0做完数据处理,异步通知Core1来取结果(Core1之前在 WaitEvent() 中休眠,收到事件后醒来)。
六、四机制协同:一个完整的跨核流程
单独讲每个机制都不难,难的是把它们串起来——实际项目里,这四个机制是 协同工作 的。
完整跨核协同流程(Core0网关Core → Core1安全Core)
Step 1 Core0上的Task_A运行
↓
Step 2 需要更新共享缓冲区(两个核共享的环形缓冲)
↓
Step 3 GetSpinlock(SpinlockId_Buf) ← 确保Core1此时不在读
↓
Step 4 写入共享缓冲区
↓
Step 5 ReleaseSpinlock(SpinlockId_Buf)
↓
Step 6 IocSend_ProcessedData(result) → IOC缓冲区(内部自动Flush Cache)
↓
Step 7 ActivateTaskAsynchronous(Task_SafetyValidator) → IPI → Core1 OS
↓
Step 8 Core1:Task_SafetyValidator被放入就绪队列
↓
Step 9 调度器运行Task_SafetyValidator
↓
Step 10 IocReceive_ProcessedData(&data) → 内部自动Invalidate Cache,从IOC缓冲区读
↓
Step 11 GetSpinlock(SpinlockId_Buf) → 读共享缓冲(也需要SpinLock保护)
↓
Step 12 ...执行安全验证逻辑
|

四机制分工总结
| 机制 |
解决什么问题 |
底层关键操作 |
| Multi-Core OS |
两个核各自独立调度,任务静态绑定到核 |
StartCore() / CORE-AFFINITY配置 |
| IOC |
跨核传递数据,OS托管Cache一致性 |
内部Flush + Invalidate + 内存屏障 |
| SpinLock |
保护共享内存临界区,跨核互斥 |
LDREX/STREX原子指令 |
| ActivateTaskAsynchronous |
Core0触发Core1去执行某个任务 |
跨核邮箱 + IPI中断 |
七、工程师常见踩坑
讲了原理,最后列一下实际项目里最常见的多核踩坑,每一条都是真实项目事故的浓缩:
⚠️ 多核AUTOSAR五大常见踩坑
| 坑1 |
跨核直接访问全局变量
现象:Core1读到的数据偶尔是旧的,概率性故障,极难复现
正确做法: 必须用IOC,或手动Flush + Invalidate + 内存屏障 |
| 坑2 |
SpinLock临界区太长
现象:持有SpinLock期间本核高优先级任务无法抢占,导致实时性违规
正确做法: SpinLock只保护共享变量读写,不含任何计算逻辑,临界区 < 10μs |
| 坑3 |
多个SpinLock嵌套顺序不一致
现象:压力测试下偶发死锁,系统挂死
正确做法: 全项目统一SpinLock编号,严格按编号从小到大获取 |
| 坑4 |
ActivateTaskAsynchronous过度使用
现象:频繁跨核中断导致Core1调度抖动,实时性无法保证
正确做法: 高频通信用IOC(共享内存轮询),只在"事件触发"场景用跨核激活 |
| 坑5 |
忽略内存屏障,编译器和CPU乱序执行
现象:syncFlag已经写了1,但数据还没写完,Core1误判数据就绪
正确做法: 用IOC(内部已封装屏障),不要手写自旋锁而不加DMB/DSB |
八、总结
回到开头的问题: 硬件多核选好了,软件怎么把多核真正用起来?
| 






 订阅
订阅