| 编辑推荐: |
本文主要介绍了智能驾驶与具身智能软件架构对比相关内容。希望对你的学习有帮助。
本文来自于微信公众号去哪儿拿offer,由火龙果软件Alice编辑,推荐。 |
|
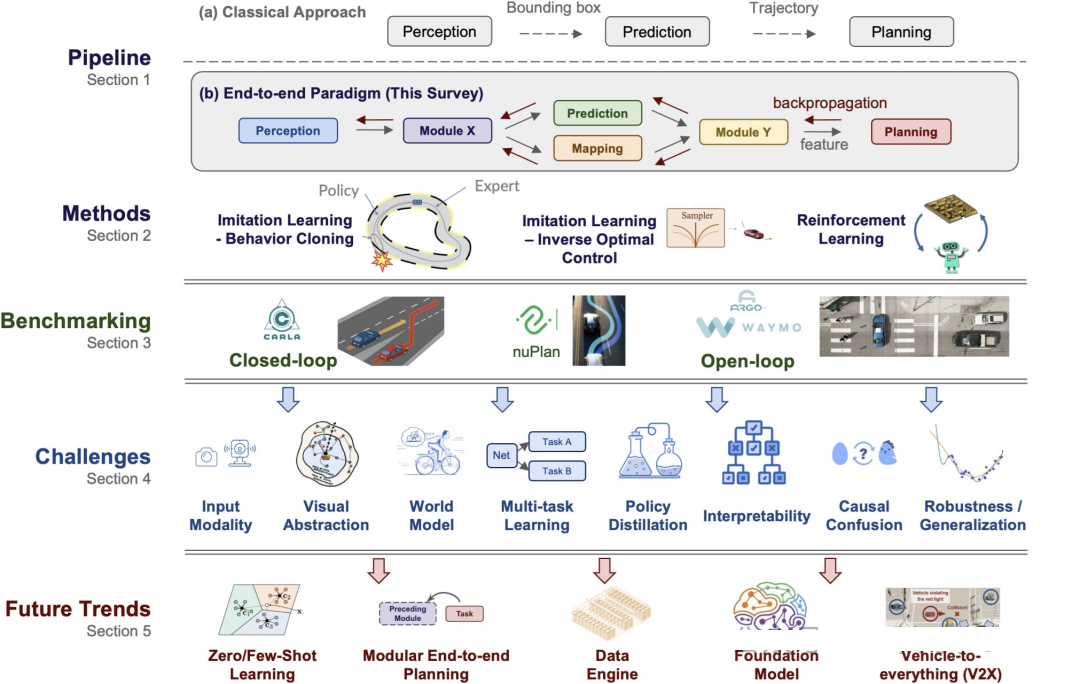
一、整体架构同源性与核心差异概述
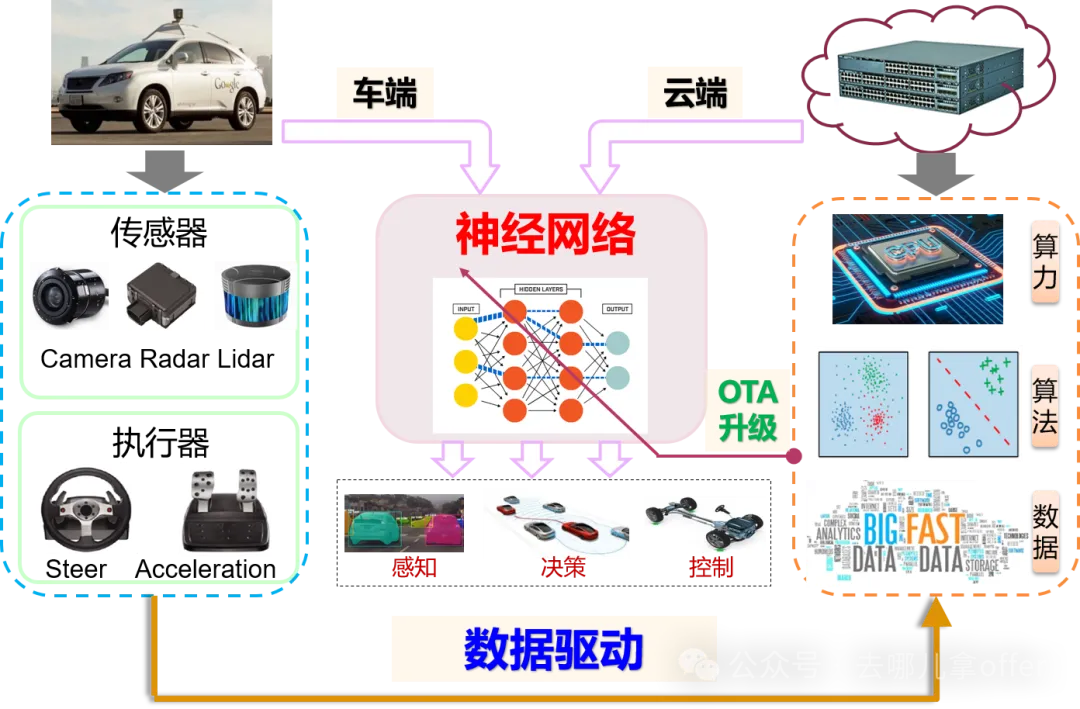
智能驾驶本质上属于轮式机器人范畴,是具身智能的细分垂直场景,二者软件架构具备底层同源性,均遵循“感知、决策、规划、控制、执行”的机器人通用技术逻辑,但因落地场景、安全标准、运行环境和任务目标的本质区别,形成了两套差异化的架构体系。
智能驾驶软件架构以极致安全、实时确定性、合规稳定性为核心设计目标,整体架构分层严谨、模块解耦清晰,具备多重冗余兜底机制,完全服务于道路交通的高速、高风险、强规则场景。
而通用具身智能软件架构以环境适配、通用交互、自主学习、柔性执行为核心,架构设计更侧重闭环迭代与场景泛化能力,适配非结构化、复杂化、人机高频交互的复杂作业场景,容错性与动态调整能力更强。
二、整体架构设计逻辑对比
2.1 智能驾驶架构设计特点
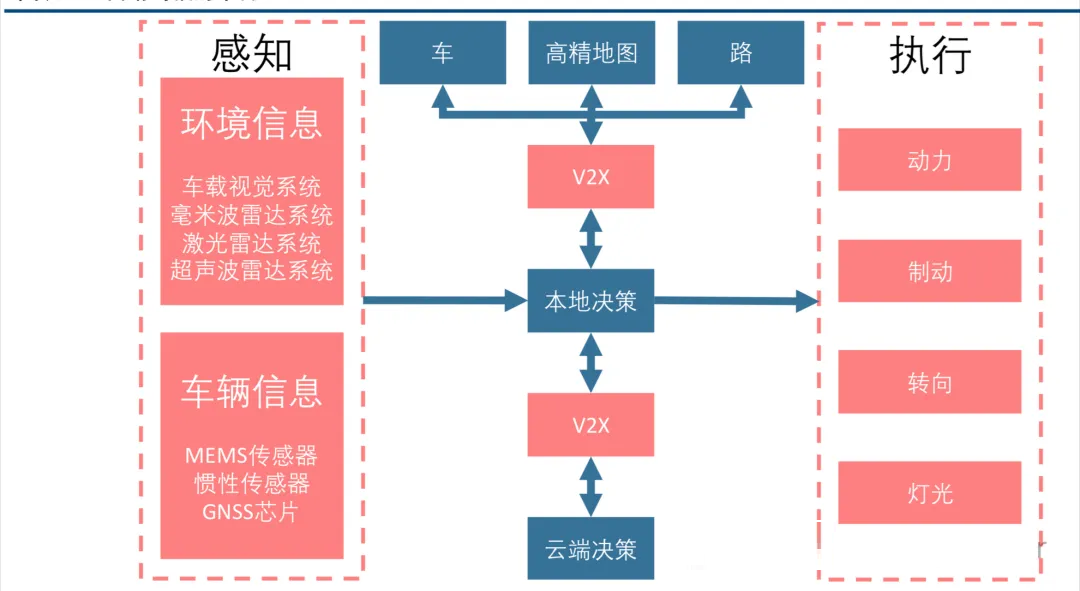
从整体架构设计逻辑来看,智能驾驶软件架构普遍采用分层模块化与快慢双脑结合的设计模式,整体运行逻辑固定且可控,核心架构分为感知融合、定位建图、行为预测、决策规划、底盘控制、系统安全兜底六大核心层级,各模块各司其职、串行联动,同时搭载独立的安全监控模块,全程对全链路数据、设备状态、决策动作进行实时校验。
目前行业主流分为两种架构流派:
一是特斯拉主导的端到端一体化架构,摒弃冗余人工规则,实现从图像采集到底盘控制的全链路直接推理,响应更顺滑;
二是华为、国内新势力车企采用的双脑架构,以传统实时控制体系作为安全兜底,以大模型智能推理作为进阶决策,兼顾安全性与智能化。整套架构的核心诉求是消除不确定性,杜绝任何试错性行为,保障车辆在结构化道路行驶的绝对安全。
2.2 通用具身智能架构设计特点
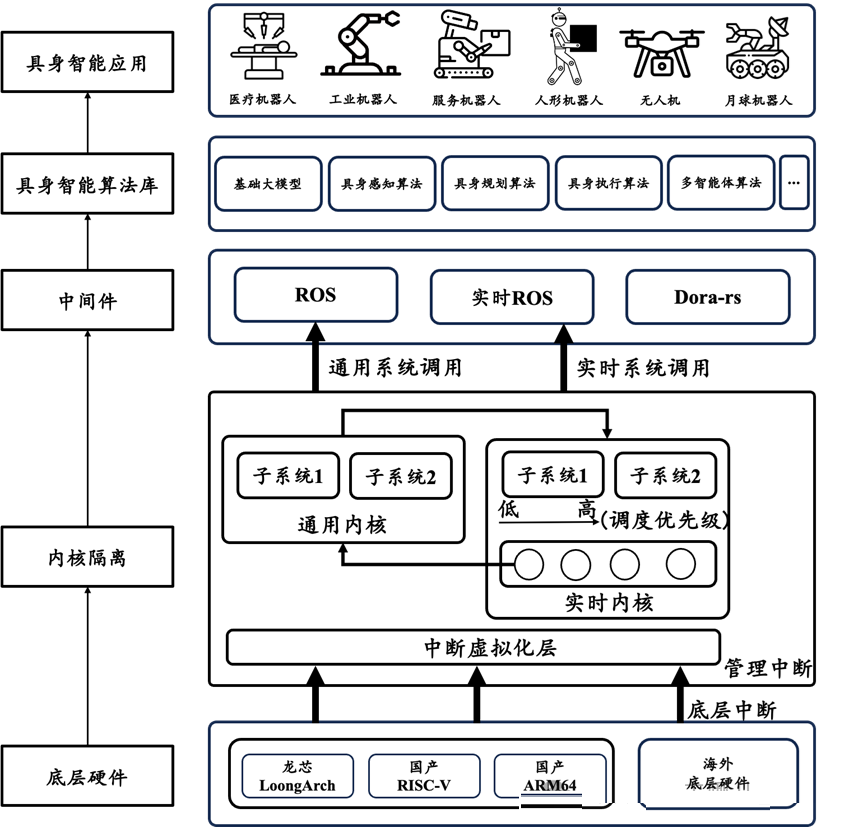
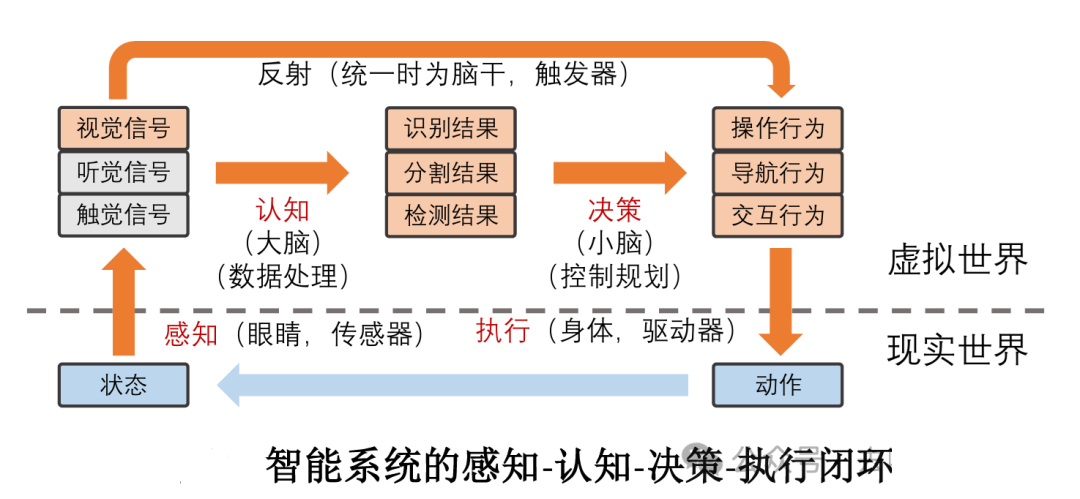
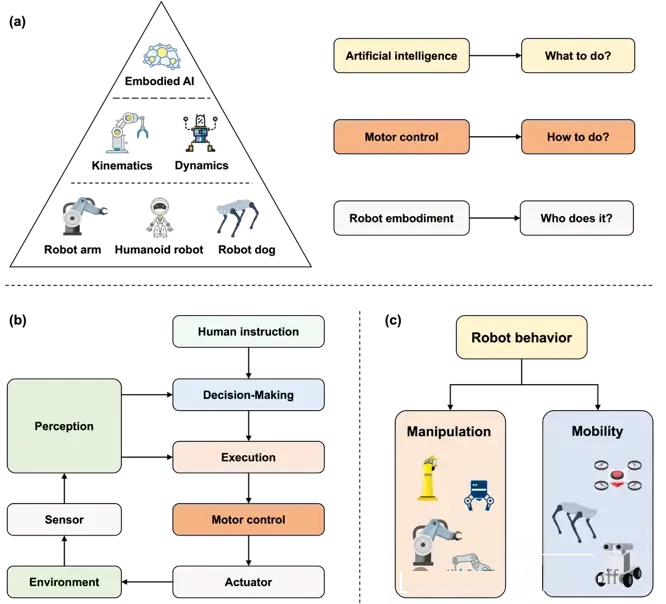
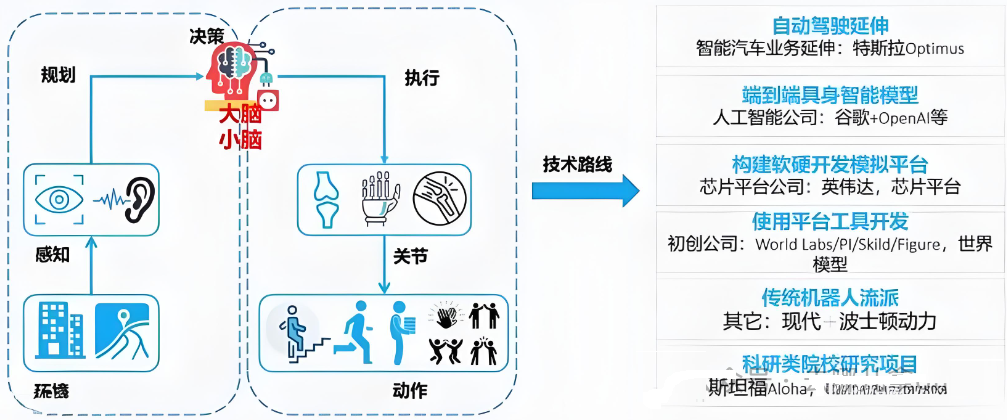
通用具身智能软件架构则采用大脑、小脑、脊髓的仿生分层闭环架构,打破了固定模块的串行运行逻辑,形成感知、决策、执行、反馈的实时动态闭环。
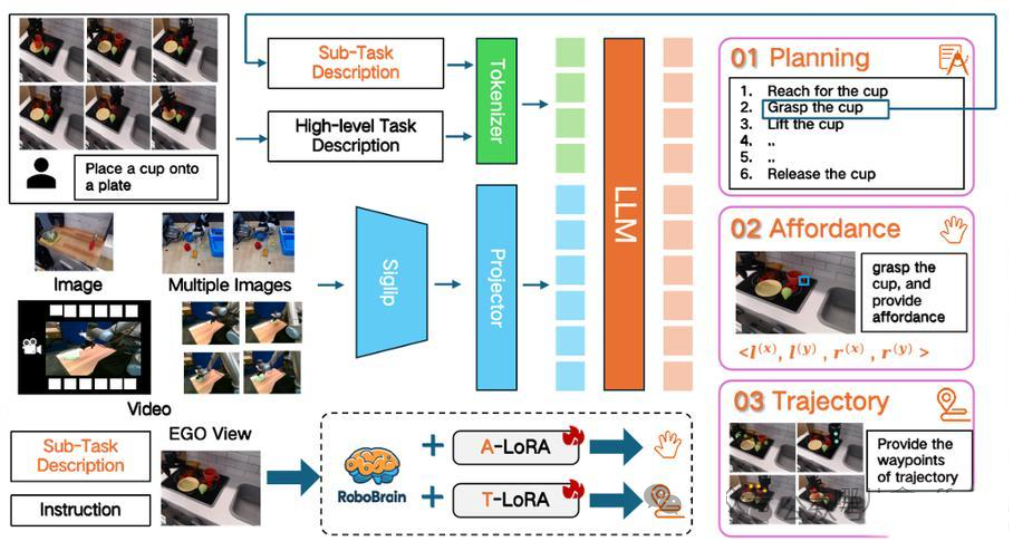
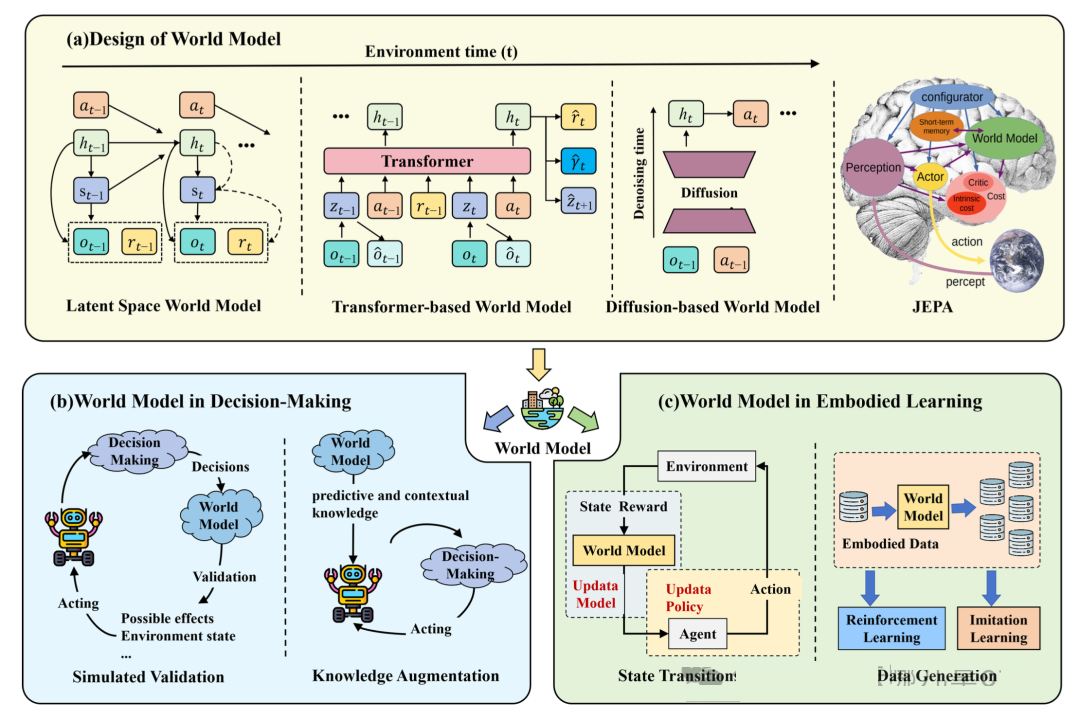
其中大脑层依托大语言模型、视觉语言动作模型与世界模型,负责全局任务理解、长时序任务拆解和语义级环境认知;小脑层通过模型预测控制、强化学习算法完成精细化轨迹生成、动作策略优化;
脊髓层依托经典控制算法实现底层关节、肢体的基础伺服控制与动力输出。
同时整套架构搭载常态化环境反馈与自监督学习机制,能够根据环境变化和执行结果实时迭代动作策略,核心优势在于适配开放、无固定规则的复杂场景,支持自主探索、试错优化和多场景通用作业,区别于智能驾驶的固定化运行逻辑。
三、核心功能模块架构差异
3.1 感知模块差异
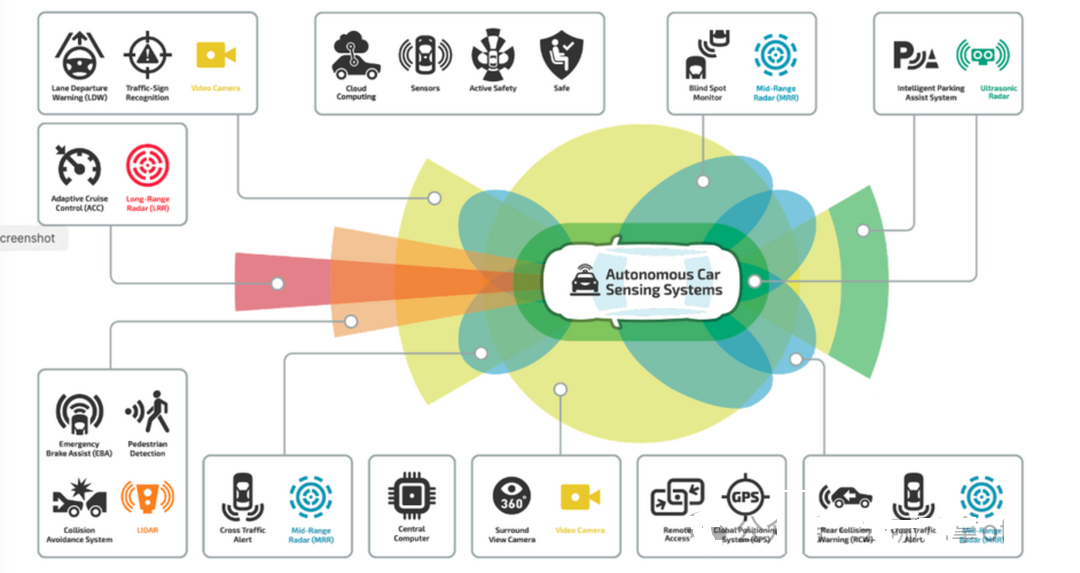
在感知模块设计上,二者的适配场景差异极为显著。智能驾驶感知系统聚焦高速、远距离、高动态的道路交通环境,采用激光雷达、毫米波雷达、高清摄像头、IMU的多传感器冗余组合,依托BEV鸟瞰图空间融合技术,对车道线、交通灯、车辆、行人、障碍物等交通核心元素进行高精度识别,探测距离可达200米以上,感知延迟严格控制在100毫秒以内,追求全天候、全场景的感知稳定性与准确性,杜绝感知漏检、误检引发的安全事故。
具身智能感知系统则聚焦近场精细化交互场景,以3D视觉相机、力传感器、触觉传感器、近距离红外传感器为核心,辅以基础视觉设备,重点感知物体姿态、接触力度、环境杂物分布、人机交互状态等细节信息,探测范围仅覆盖0.1米至10米的近距离区域,对感知延迟的容错性更高,允许100至500毫秒的延迟波动,更注重感知的精细化、交互性而非远距离、高动态适配能力。
3.2 定位与建图模块差异
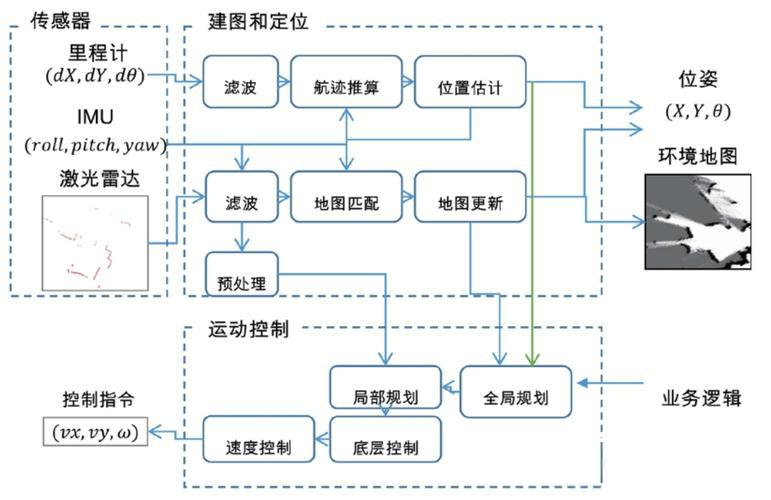
定位与建图模块的设计差异,源于二者对运行空间的不同需求。智能驾驶高度依赖空间定位的绝对精度,传统架构依托高精地图构建全局道路拓扑信息,精准标注车道、路口、交通标识、限速规则等核心数据,新一代端到端架构则通过隐式建图实现空间建模,整体绝对定位精度控制在30厘米以内,能够精准匹配道路规则,保障变道、跟车、转弯、避让等驾驶动作的合规性与安全性。
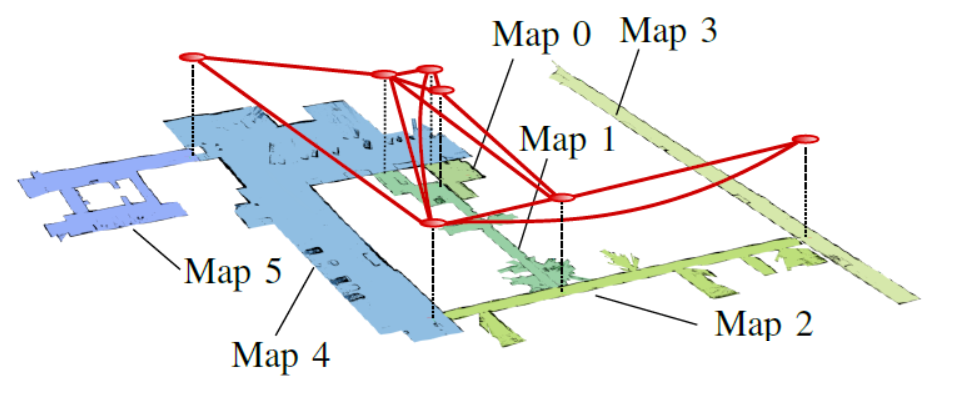
具身智能无需依赖标准化高精地图,核心采用轻量级实时SLAM算法与语义地图构建技术,可在未知、非结构化环境中实时构建局部占用网格、点云地图,动态完成环境重定位与路径更新,不追求全局绝对定位精度,但对关节空间的相对定位精度要求极高,可达5毫米以内,能够精准适配机械臂抓取、肢体行走、精密装配等精细化操作场景。
3.3 决策规划模块差异
决策规划模块是二者架构核心差异的集中体现。智能驾驶的决策规划是典型的规则驱动、风险最小化模式,整体分为行为决策与轨迹规划两个阶段,行为决策严格遵循交通法规、道路通行规则,完成跟车、变道、超车、避让、驻车等基础行为判断;轨迹规划则基于车辆物理极限、安全距离约束,生成平滑、稳定、无风险的行驶轨迹,全程禁止自主探索与试错,所有决策动作均有安全兜底规则约束,核心目标是规避一切行驶风险。
具身智能的决策规划是目标驱动、学习优化模式,依托大模型完成复杂任务的拆解与理解,通过视觉语言动作模型生成连续动作序列,再结合实时环境反馈动态调整执行策略,支持开放场景下的多类型通用任务,能够通过强化学习、自监督学习持续优化动作策略,允许作业过程中的非致命性试错,核心目标是提升复杂场景的任务完成度与环境泛化能力。
3.4 控制执行模块差异
控制执行模块的差异,对应二者完全不同的运动特性。智能驾驶面向高速行驶场景,控制执行体系追求高实时、高稳定、低抖动,依托冗余线控底盘与双备份ECU执行设备,实现转向、油门、刹车的精准控制,控制频率可达100至1000赫兹,响应延迟低于50毫秒,整体控制容错率极低,达到10的负9次方级别,确保高速行驶过程中车身姿态稳定,杜绝失控、偏移等危险情况。
具身智能面向低速精细化交互场景,以柔顺控制、力控适配为核心,依托伺服电机、高精度减速器、实时力反馈传感器组成执行体系,重点实现柔性碰撞检测、力矩自适应调节、接触力精准控制,控制频率为10至100赫兹,支持人机交互、精密操作中的柔性缓冲,允许轻微动作偏差,容错率为10的负6次方级别,优先保障作业过程的安全性与操作适配性。
3.5 系统安全架构差异
系统安全架构的设计标准,是二者最核心的硬性差异。智能驾驶直接关联道路人身安全,执行ISO 26262最高ASIL-D安全等级标准,感知、计算、执行、电源全链路搭载多重冗余设计,任意单一模块故障均可触发系统自动降级、紧急驻车等兜底动作,对致命安全错误实行零容忍,所有运行逻辑、算法模型、硬件设备均需经过严苛的安全验证,杜绝一切系统性风险。通用具身智能无强制的高端工业安全等级要求,采用功能安全与行为安全结合的轻量化安全体系,主要依托碰撞检测、力矩限制、软停机、紧急制动等基础机制,规避人身伤害与设备损坏问题,允许非致命性的动作失误、任务失败,可通过重启策略、重新规划动作完成二次作业,安全容错空间更大。
四、核心维度参数对比汇总
| 对比维度 |
智能驾驶 |
具身智能 |
| 安全等级 |
ASIL-D最高等级,零致命错误容忍 |
常规功能安全,允许非致命错误与重试 |
| 响应延迟 |
感知延迟<100ms,控制延迟<50ms,极致稳定 |
整体延迟100-500ms,力控场景可适配1s延迟,容错性高 |
| 算力功耗 |
算力500-1000TOPS,功耗200-500W,高算力高功耗 |
算力50-200TOPS,功耗50-100W,轻量化低功耗 |
| 环境复杂度 |
结构化标准道路,规则明确、场景固定 |
非结构化室内外场景,环境杂乱、无固定规则 |
| 核心任务类型 |
单一闭环任务:安全、合规、稳定完成A点到B点行驶 |
通用多元任务:搬运、装配、服务、人机交互、精密操作等 |
| 学习迭代机制 |
云端批量训练、车端固定推理,全程禁止在线试错 |
端侧实时自监督学习、强化学习,支持在线试错迭代优化 |
五、技术演进趋势分析
从技术演进趋势来看,智能驾驶软件架构的发展核心是端到端轻量化升级与车路云深度协同,逐步打破传统模块化的割裂问题,融合视觉语言动作模型与地图专属头部模块,在保留安全兜底机制的前提下,提升复杂路况的泛化能力,同时依托云端完成数据闭环、仿真训练、模型迭代,车端仅负责实时稳定推理,始终以安全可控为第一原则。具身智能软件架构则聚焦通用智能化与端侧轻量化部署,从单一技能的专用机器人架构,迭代为统一世界模型驱动的通用架构,固化“大模型全局指挥、小模型精细执行、经典控制底层兜底”的分层逻辑,持续强化环境自适应、长时序任务规划、自主学习迭代能力,同时优化端侧算力功耗,适配各类终端机器人的落地需求。
六、总结
整体而言,两套架构的本质差异源于场景定位的不同。智能驾驶软件架构是服务于高速公共交通的工业级安全控制系统,严谨、固定、可控、零试错,一切设计为安全行驶让步;具身智能软件架构是服务于复杂未知环境的通用智能仿生系统,灵活、开放、可迭代、可试错,一切设计为场景泛化与自主交互服务,二者同源异构,分别代表了机器人智能的垂直极致安全与通用极致适配两大发展方向。
| 






 订阅
订阅