| 编辑推荐: |
文章文章深入浅出地讲解了CAN总线如何通过差分信号抗干扰、基于ID的非破坏性仲裁、广播过滤通信以及错误隔离机制,解决了多ECU共用总线时的“发言冲突”问题,希望对你的学习有帮助。
本文来自于讯联汽车电子,由火龙果软件Alice编辑,推荐。 |
|
导语:
刚入行时,你是不是也有过这样的困惑:车上几十上百个 电子控制单元(ECU) 共用同一条CAN总线,为什么不会“吵成一锅粥”?你挂上工具看总线数据,明明每时每刻都有报文在跑,却从没见过它们乱掉。
今天,我们从工程师最直观的困惑出发,拆解CAN总线的“交通规则”:它到底用了什么机制,让所有节点既随时能说话,又从不乱套。
一. 先看物理层:仅靠两根线,就能解决"同时发言"的冲突?
我们先看一组图:
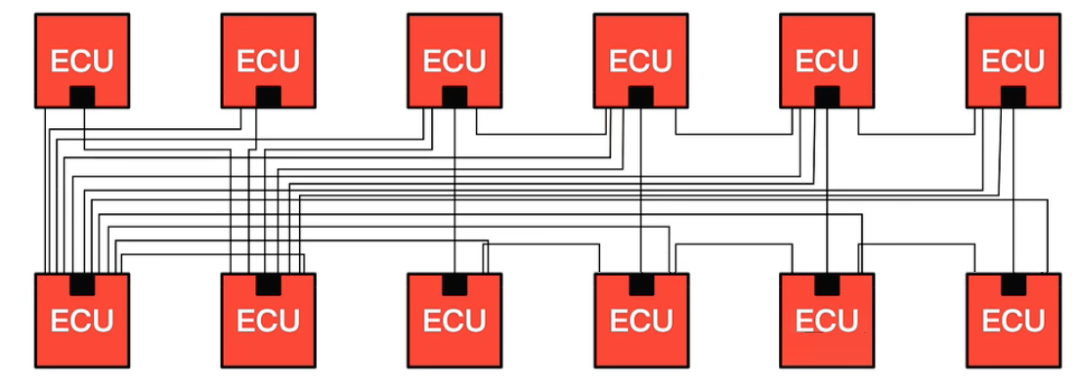
在CAN总线出现之前,ECU之间如果想交换信息,通常采用点对点连接——每两个需要通信的单元之间拉一根专用信号线。随着车上ECU数量增加到几十甚至上百个,线束会变得极其复杂,重量和成本都无法接受。
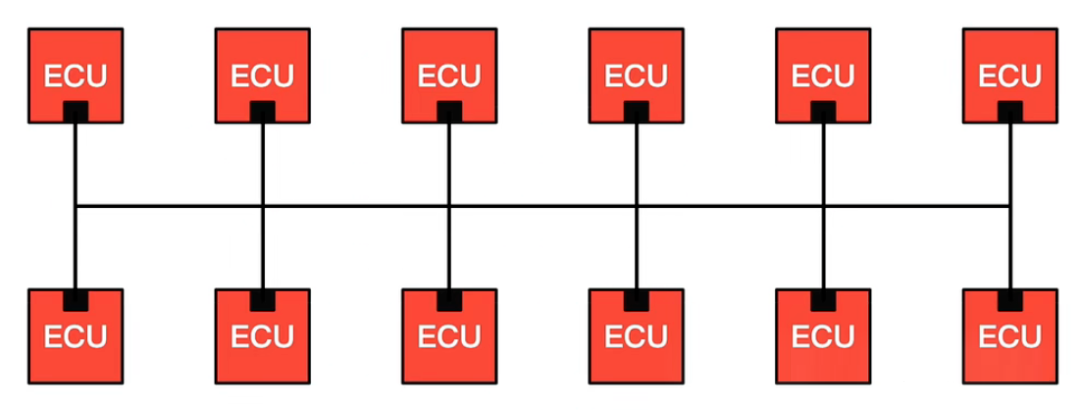
CAN总线的解决方案是:所有节点共享一对导线。
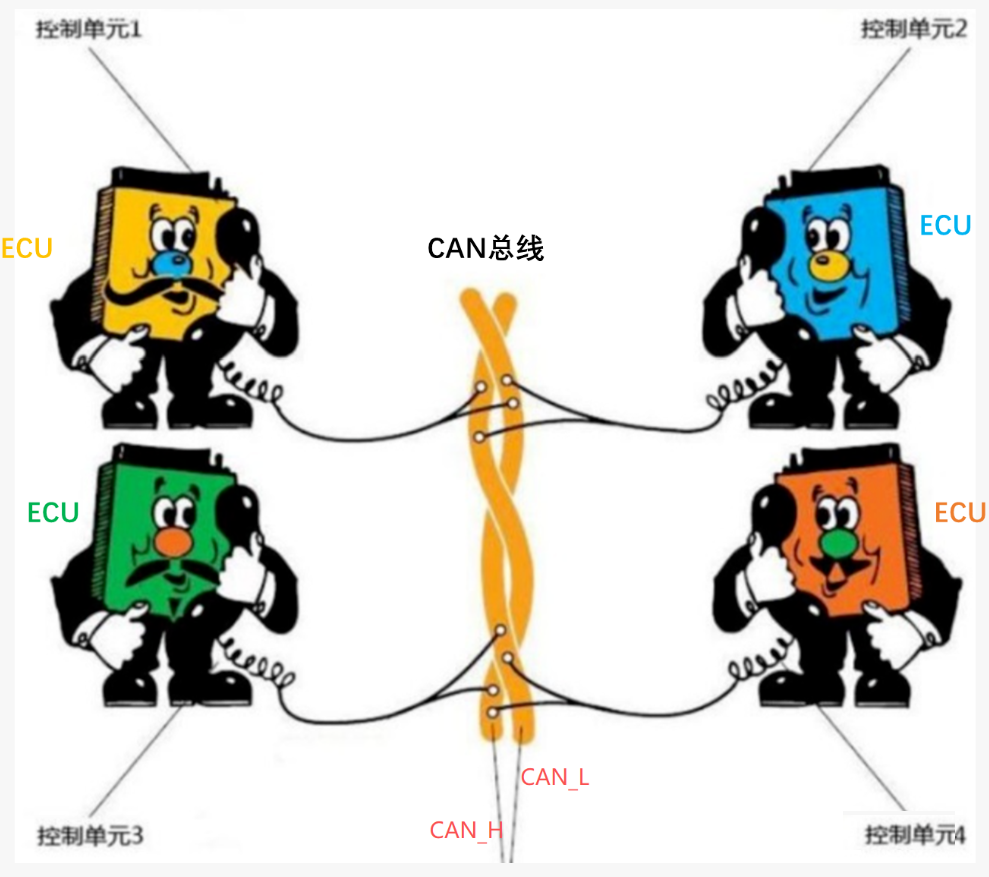
CAN总线的导线是一对双绞线:CAN_H和CAN_L ,所有ECU直接并联挂上去。使用总线之后,布线变得清晰、轻量化,线束重量大幅降低。
那么,仅靠CAN_H和CAN_L两根线,如何在强电磁干扰的发动机舱里可靠传输数据?答案不只是“差分信号”四个字,我们需要往底层多想一步。
其实,单从信息量来看,一条线就够。
假设我们规定:
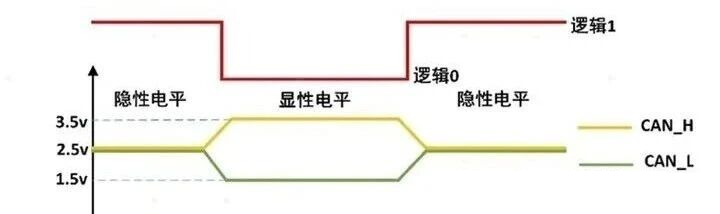
CAN_H为2.5V代表逻辑1,3.5V代表逻辑0。
那么仅用CAN_H这一条线的电平变化,就可以把一串二进制数据完整传过去。
CAN_L也一样,用1.5V代表0、2.5V代表1,同样能独立完成传输。
两条线传送的信息量完全一样——这本身就是一种冗余。
既然如此,为什么还要两根线?答案在于“差值”的抗干扰魔力。
外部电磁噪声会同时、同向、几乎同幅度地耦合到这两根缠绕在一起的导线上。
比如:原本CAN_H是3.5V(代表0),CAN_L是1.5V(代表0),差值2.0V——这是干净信号。
当干扰同时将两线电压拉升0.5V后,CAN_H变成4.0V,CAN_L变成2.0V——但差值依然是2.0V。
接收端只关心差值,干扰在“相减”这一步被直接抵消,毛刺根本浮现不出来。
而如果用单条线,3.5V被干扰拉到4.0V,接收端就可能把1误判为0——通信就出错了。
这,才是差分传输抗干扰的底层本质: 不是“两条线更厉害”,而是“相减”这个动作,自动抹掉了两条线上共有的噪声。
物理层解决了“用什么线”和“怎么抗干扰”,但真正的难题是:多个ECU同时发数据,信号不会打架吗?这就轮到 数据链路层 的仲裁机制出场了。
二. 核心机制:非破坏性仲裁,谁重要谁先用
从“同时发言”说起
先澄清一个容易被误解的前提: 在CAN总线上,正常情况下同一时刻只有一个节点在说话。
当一个节点正在发送时,其他节点会检测到总线有变化,自动退让。所以,多个节点真正“同时开口”的情况其实很少见——只有非常巧合的时候才会发生。
那万一真的巧合了呢?CAN总线的仲裁机制就是为了解决这种“同时发言”的冲突。
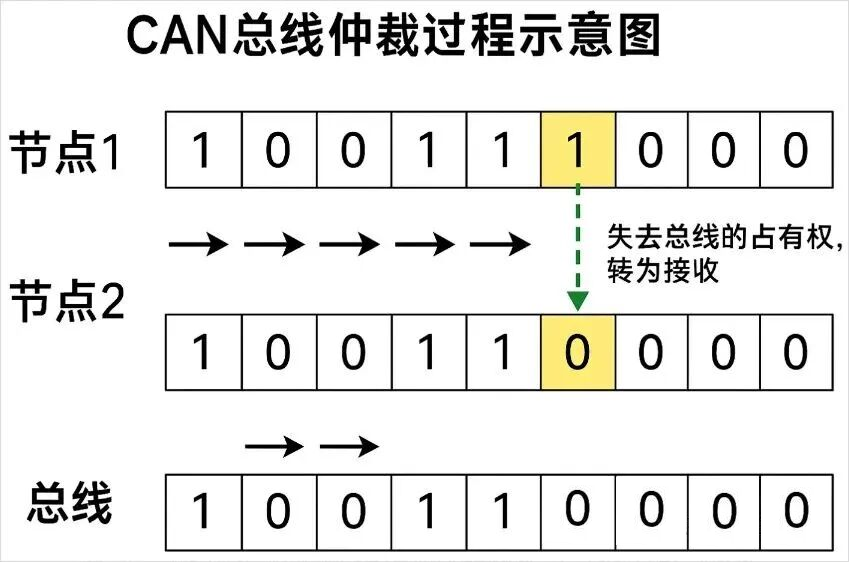
显性与隐性:谁优先级高?
为了理解仲裁,首先要搞清楚CAN总线上两种电平的“性格”:
- 隐性(1): 总线的自然状态,就像“躺平”——不主动驱动,不花力气。节点想发1,什么都不用做。
- 显性(0): 需要主动驱动,就像“拉橡皮筋”——要用点力气才能拉开。节点想发0,必须主动输出。
关键规则:只要有一个节点发显性(0),总线就是显性(0);只有当所有节点都不发0时,总线才回到隐性(1)。 换句 话 说,显性优先于隐性。
仲裁的核心机制:谁发现矛盾,谁退出
每个节点在发送每一个bit(比特)的同时, 都会实时监听总线上的实际电平。 然后把自己发出去的bit和监听到的bit做比较:
- 如果一致(发1听到1,或发0听到0)→ 一切正常,继续发。
- 如果不一致 → 产生 “矛盾” ,这就是仲裁的触发点。
什么时候会产生矛盾?
假设节点A发的是1(隐性),但节点B同时发了0(显性)。总线上的实际状态是0(显性)。节点A监听到0,和自己发出去的1不一致 → 节点A发现自己“说错了” → 节点A自动退出,转为接收状态。而节点B发的是0,监听到的也是0 → 没矛盾 → 节点B继续发送。
总结成一句话:谁发1却听到0,谁就退出。发0的永远赢。
ID是怎么参与仲裁的?
CAN报文头部有一个 标识符(ID) ,仲裁时节点们逐位把自己的ID输出到总线上。ID的每一位要么是0(显性),要么是1(隐性)。
- 如果两个节点在某一位上,一个发0、一个发1 → 发1的那个会检测到矛盾 → 退出。
- 剩下的节点继续比较下一位,直到只剩下一个节点。
结果:ID的数值越小,优先级越高 (因为在高位上先出现0的人占优)。
一个有趣的事实:
高优 先级的节点从头到尾都不知道自己参加过仲裁。 因 为它发的每一位都和监听到的一致,它只觉得自己在正常发送。只有那些退出的节点才知道“我输了”。
防止“半路插队”的机制
你可能会想:如果一个节点已经发到一半了,突然另一个节点插进来,会不会乱?
不会。CAN总线有一个重要规定: 任何一个节点要开始发送,必须先检测到总线上连续出现11个隐性位(1) ,才认为总线空闲。而一帧正常的CAN报文内部,绝不会出现连续11个1。
所以, 正在进行的发送不会被中途打断 ,真正的“仲裁碰撞”只发生在多个节点同时等待空闲结束、然后同时开始发送的那一刻。
仲裁机制巧妙在: 它不是靠一个中心裁判来判谁赢,而是靠“谁发现自己矛盾谁就退”这种自组织的方式 ,简单、可靠、纯硬件完成,效率极高。
三. 广播出去,只听自己的?
仲裁解决了“谁能发送”的问题,但发送出去的信息如何被需要的节点接收?
CAN采用的是 广播式通信 :一个节点发出的报文,总线上所有其他节点都能收到。每个节点内部都有一个硬件接收过滤器——收到报文后先检查ID,如果匹配自己关心的ID,就接受并处理;否则直接丢弃,CPU完全不介入。
就像在会议室里,每个人都在发言,但每个人只听与自己工作相关的信息——财务只听报销数据,技术只听需求变更,互不干扰。
这种设计的好处是 不需要点对点寻址,通信开销极低。 节点不需要知道“谁需要这个信息”,只管往外发;需要该信息的节点自然会收。这极大简化了网络管理和软件设计。
两者关系:
- 仲裁 → 解决“谁先说话”的冲突,保证紧急信息优先。
- 广播 → 解决“和谁说话”的效率,一呼百应但不乱。
二者叠加,CAN总线就做到了:多节点随时想发就发,优先级高的自动插队,低优先级的自动等待,所有节点各取所需。
四. 单个节点坏了,总线不瘫痪
CAN总线还具备很强的错误处理能力:错误检测与故障隔离。
每个报文尾部都带 有 CRC 校验字段。 如果一个节点发出的数据出现错误,其他节点会检测到并发送“错误帧”。发送节点收到错误帧后自动重发,整个过程对应用层透明。
更为重要的是故障隔离机制:每个节点内部维护一个错误计数器。发送或接收错误会使计数器累加。 当错误次数超过一定阈值,节点会进入“被动错误”状态——只接收不发送,避免继续干扰总线。
如果错误继续增加,节点最终会将自己“总线关闭”,彻底离线。单个节点故障不会导致整条总线瘫痪,这就是 CAN总线的高鲁棒性。
五. 工程师如何“看见”总线上的对话?
原理讲完了,但实际调试时,你面对的还是两根导线上的电信号—— 看不见、摸不着。 怎么办?
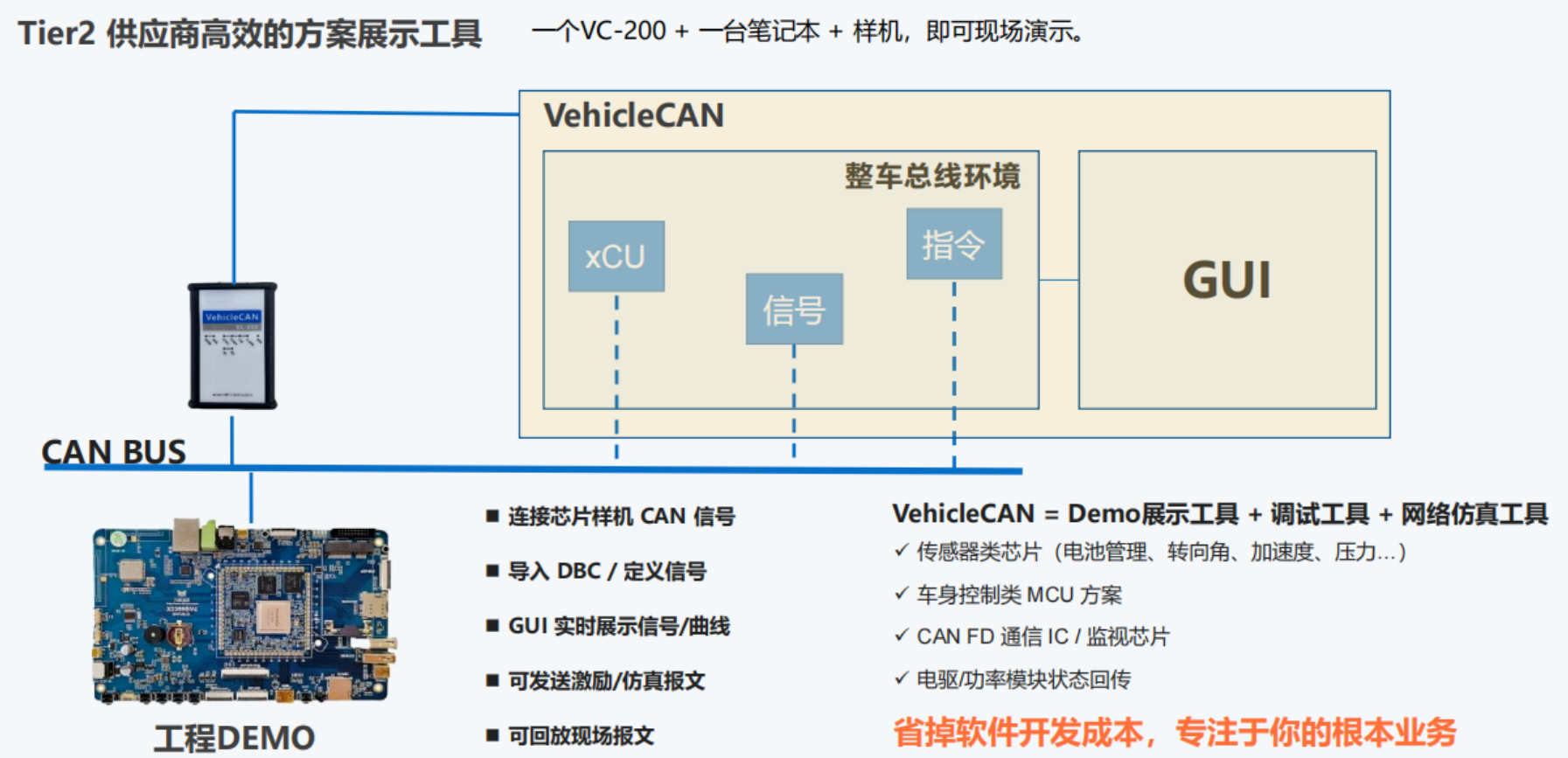
你需要一个 监听节点 : CAN接口硬件 + 配套软件 。它并联到总线上,被动接收所有报文,将电气信号还原成你能直接阅读的十六进制数据:报文ID、数据字节、时间戳等信息一目了然。
以讯联的XL BUS(软件) 和VC-200(接口硬件) 为例,使用这样的工具,你可以完成以下任务:
图注:讯联的XL BUS(软件) 和VC-200(接口硬件)
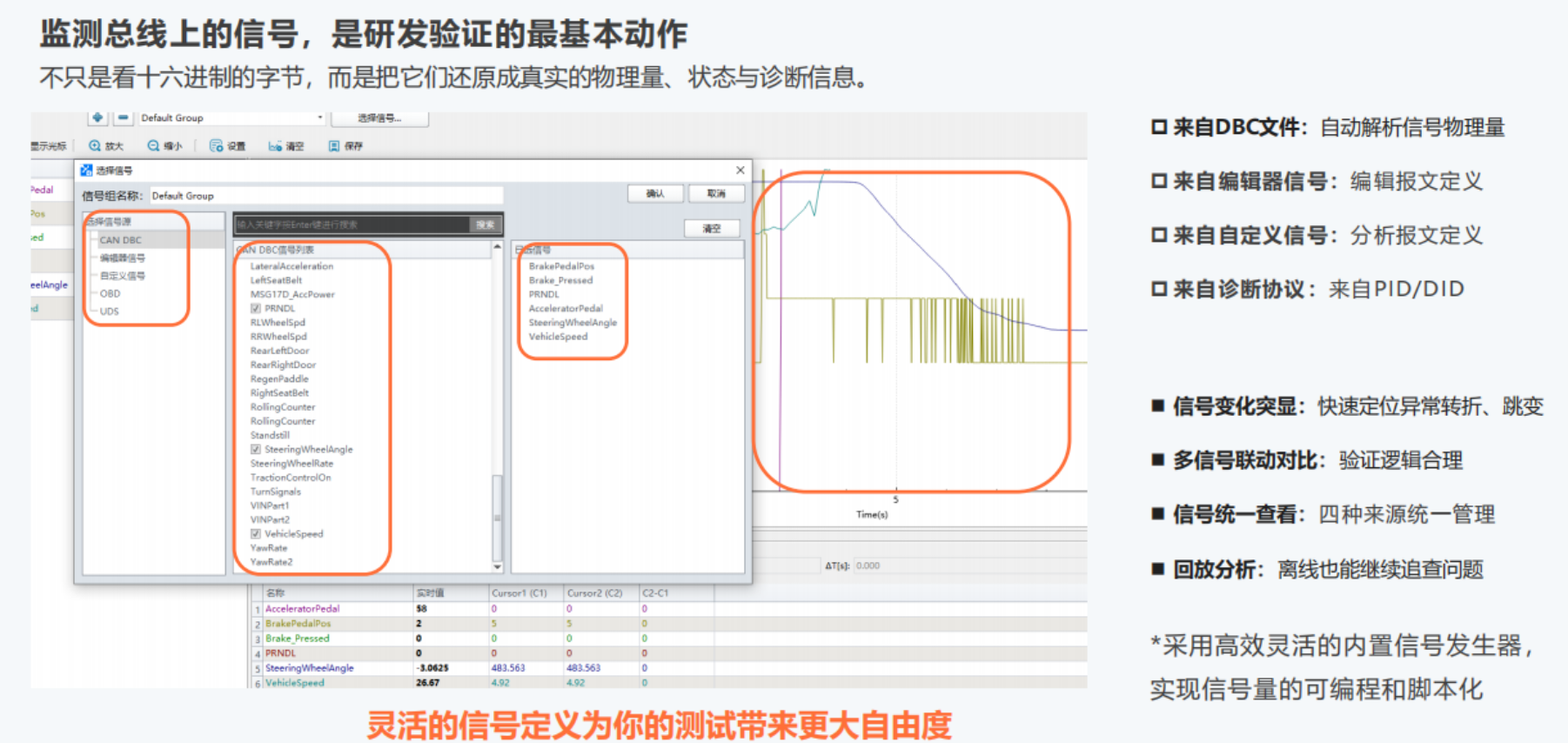
1.实时监控: 观察总线上正在传输的报文,包括ID、数据、周期等信息。
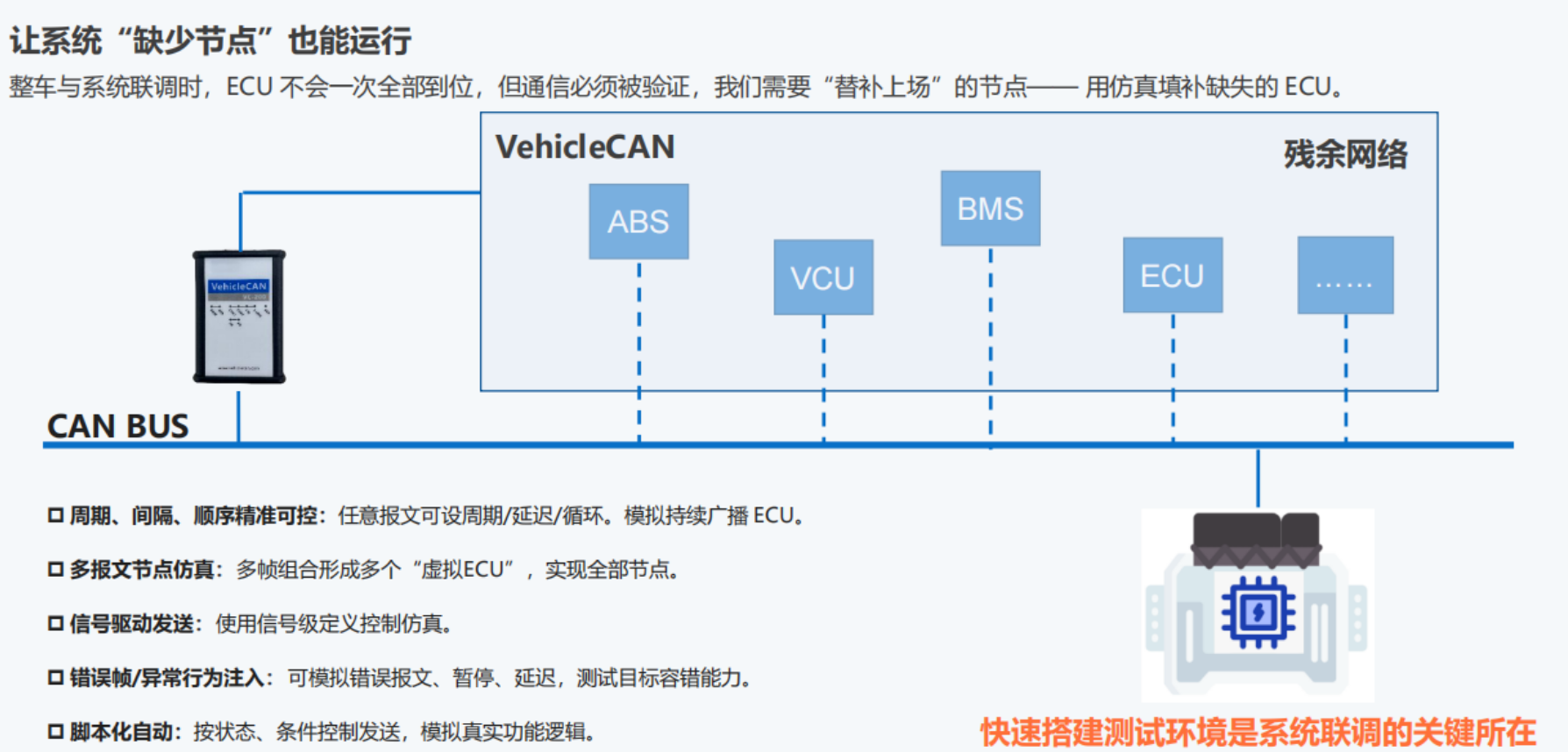
2.仿真发送: 当某个真实ECU缺席时,让工具模拟它发送报文,使系统能够继续工作,非常适用于调试阶段。
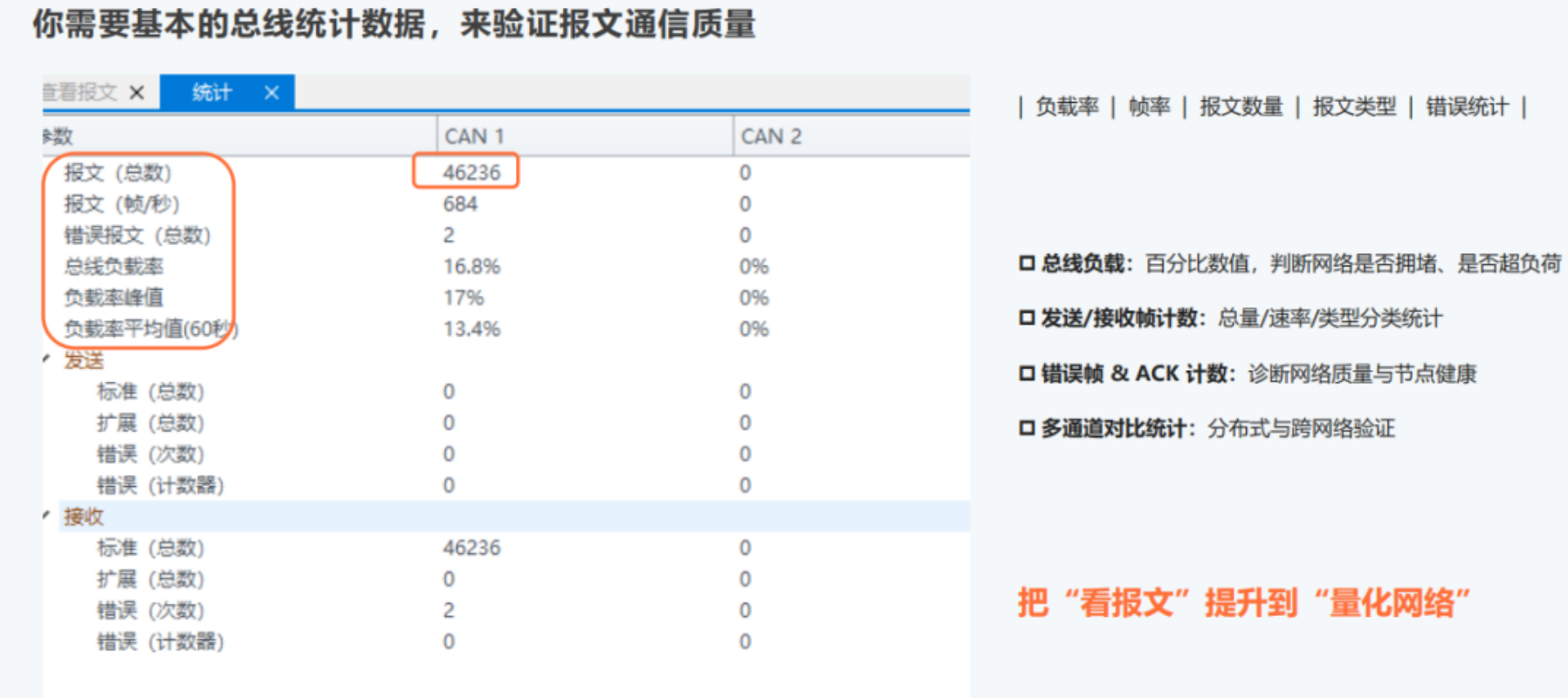
3.统计分析: 从时间域切换到频率域,快速识别高频和低频报文,发现异常帧。
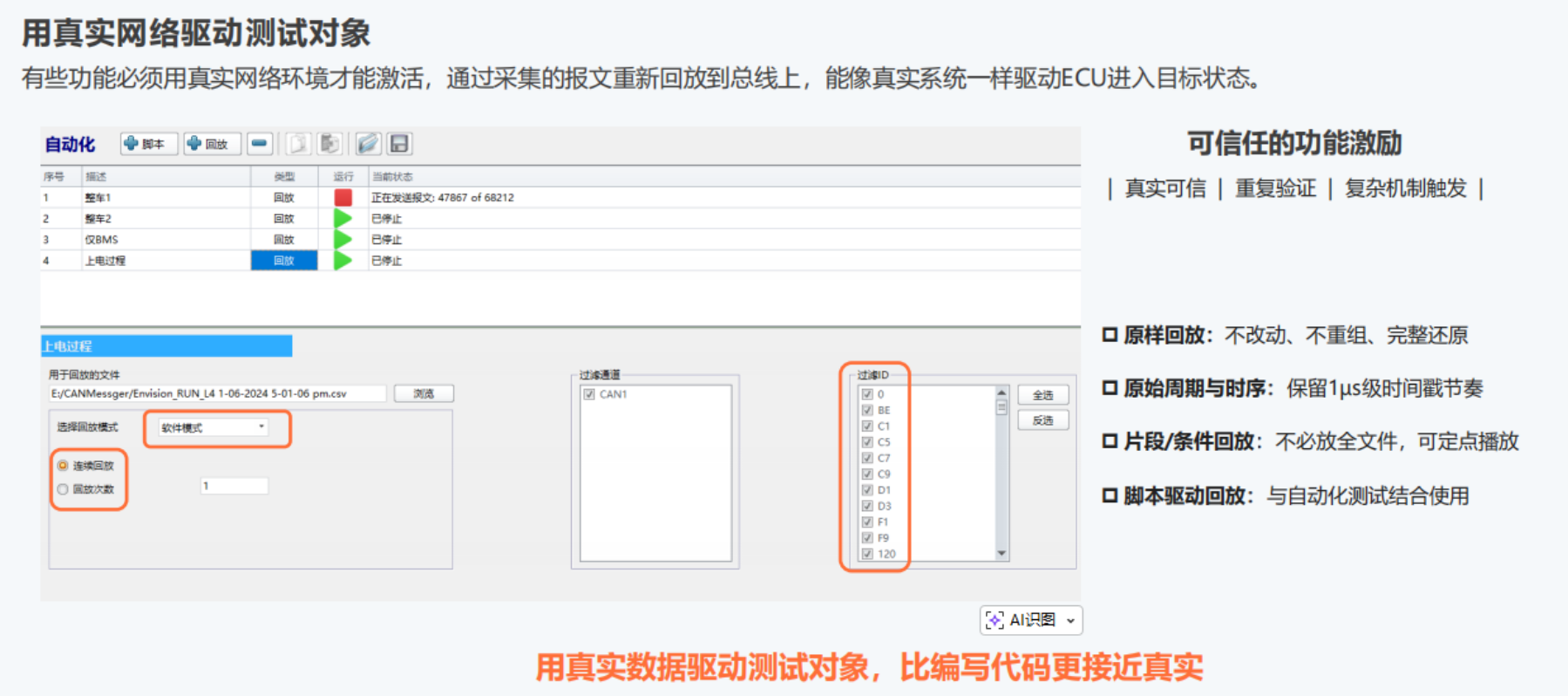
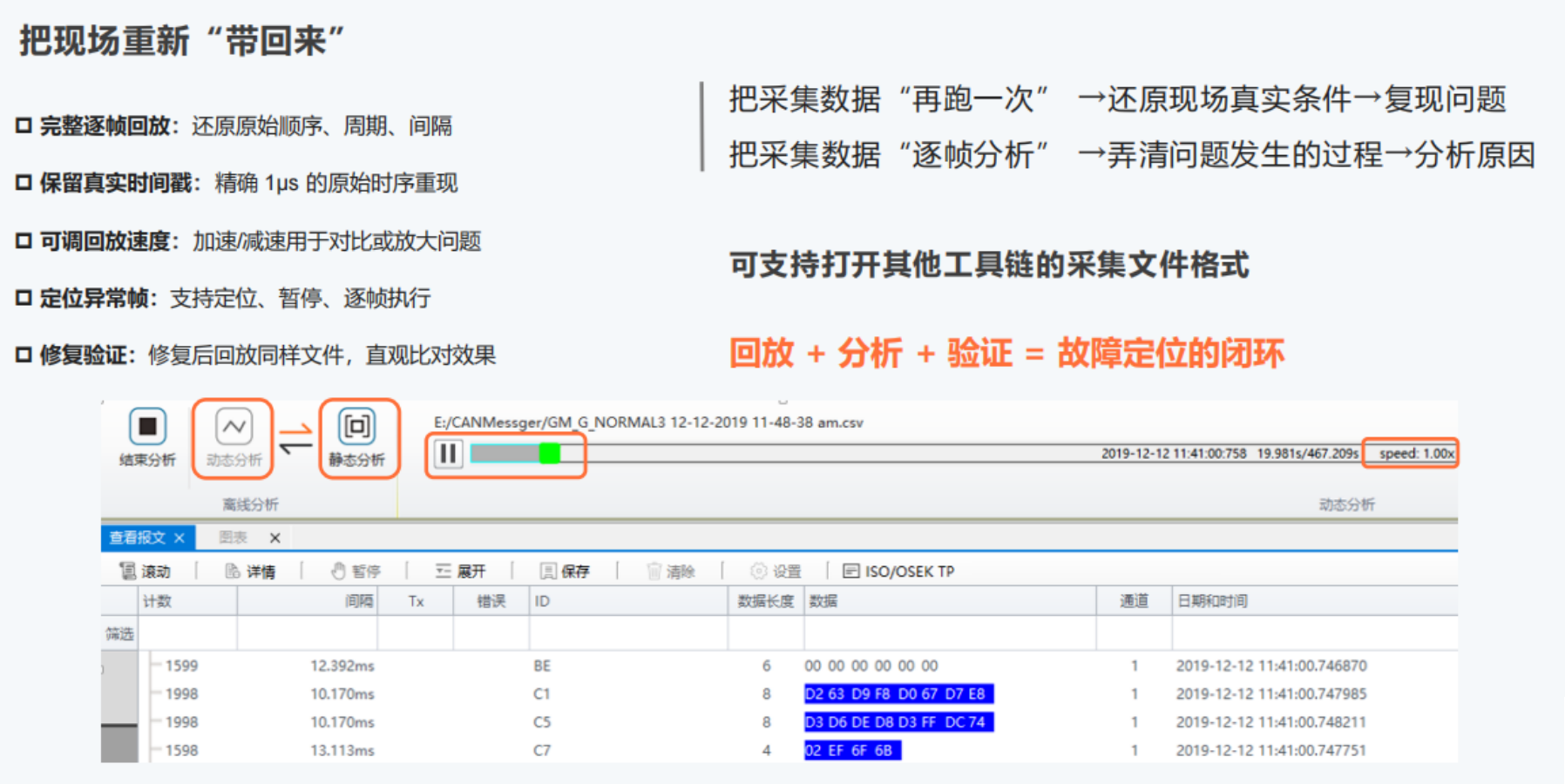
4.记录与回放: 将路试时的总线数据保存为文件,回到办公室后慢速回放,仔细分析偶发故障。
总结
CAN总线的核心设计可以归纳为四个层次:
- 物理层:差分信号传输,抗干扰能力强,两 根双绞线覆盖全车。
- 仲裁层:基 于ID的非破坏性仲裁,紧急信息优先发送。
- 应用层:广播通信加硬件过滤,各取所需,开销极低
- 错误层:CRC校验加 错误计数隔离,单点故障不扩散。
回到最初的问题:几十个ECU同时发消息,为什么总线不会乱?因为CAN不是简单地让节点“排队”,而是给每条消息附加了优先级标签,冲突时低优先级自动退让,高优先级不受影响。这套机制简单、可靠,使CAN总线在汽车通信领域统治了近四十年,至今仍是绝对主流。
| 






 订阅
订阅