| 编辑推荐: |
这篇文章通过对比分布式、域集中式和区域式三代E/E架构,深度解析了汽车网关(Gateway)从“哑巴门”到“翻译官”再到“软件消解”的角色演进,并详细阐述了AUTOSAR、ARXML、COM/PduR等底层机制如何实现跨域信号的高效路由与转换,希望对你的学习有帮助。
本文来自于机器人不喝咖啡,由火龙果软件Alice编辑,推荐。 |
|
你踩下制动踏板的那一刻,车身上有一条信号要完成一次跨域旅行:从制动 ECU 出发,穿越不同协议、不同格式的通信网络,最终抵达 ADAS 控制器做出决策。这条路上,有人负责打包,有人负责路由,有人决定规则,有人负责调试。 这一切,都围绕着同一个角色——Gateway。
两个词,先说清楚
在讲 Gateway 之前,必须先搞清楚两个概念——因为整篇文章里所有的"转换""路由""打包",说的都是这两件事之间的操作。
信号(Signal) ,是一条有意义的数据值。比如:车速 = 120 km/h,发动机转速 = 3200 rpm,制动踏板压力 = 0.3 MPa。信号是逻辑层面的东西——它表达的是"什么意思"。
PDU(Protocol Data Unit,协议数据单元) ,是信号在总线上传输时的容器。你可以把 PDU 理解成一个信封:把若干个信号的数值按规定的位置塞进去,封好,发出去。对面收到这个信封,按同样的位置规则拆开,还原出每个信号的值。
两者的关系: 信号是内容,PDU 是容器 。一个 PDU 可以装多个信号;同一个信号,可以出现在不同格式的 PDU 里。
这个区分很关键——Gateway 做的核心工作,就是在不同格式的 PDU 之间"搬运信号的值"。
第一代:分布式架构——Gateway 还是个哑巴门
一条 CAN 总线,所有人共听
2000 年代初,一辆车里有几十个 ECU(到了 2010 年代中高端车型,这个数字可以超过 100),挂在多条 CAN 总线上——动力总线、车身总线、诊断总线各自独立。
CAN 的工作方式是广播:发动机 ECU 把车速信号打包进一个 PDU,往总线上一扔,总线上所有人都收到。只有关心这条消息的 ECU(比如仪表盘、ABS 控制器)才会解包处理,其他人忽略。
这个机制简单可靠,但有一个前提: 所有人在同一条总线上,说同一种语言 。
这个年代的"Gateway"做的事极其有限:如果一辆车有两条 CAN 总线(比如动力总线和车身总线分开),Gateway 就是把一条总线上的 PDU 搬到另一条总线上,原封不动,不修改任何内容,不理解任何语义。
工程师叫它"哑巴门"——你从左边走进来,我从右边推出去,我不管你在说什么。
信号的定义?用 DBC 文件 ——一种由 Vector 公司在 1990 年代发明的文本格式,人写人读,工程师之间发邮件传,偶尔传错版本就出 Bug。
这个时代的问题不是 Gateway,是 所有人都在同一个房间里说话 ——房间一大,噪音就乱了。
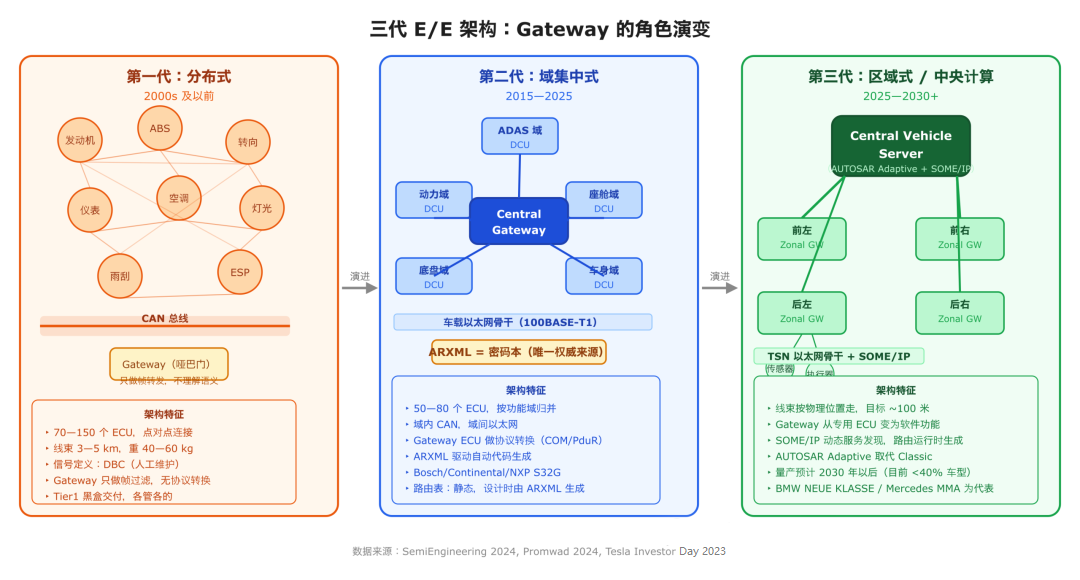
三代 EEA 架构与 Gateway 角色演进
第二代:域集中式——Gateway 成为真正的翻译官
为什么要分域
域集中式架构 把 150 个 ECU 按功能归并成五个域:动力域、底盘域、ADAS 域、座舱域、车身域。每个域有一个域控制器(DCU)统管。
这带来一个新问题: 域内通信还是 CAN,域间通信升级成了车载以太网 (100BASE-T1 / 1000BASE-T1)。
为什么域间要用以太网?带宽。ADAS 域需要把摄像头感知结果发给动力域做控制决策,CAN 最高 1 Mbps 根本传不起来,以太网能到 100 Mbps 甚至 1 Gbps。
但这带来了一个根本性的矛盾:
动力域的发动机 ECU 发出一个 PDU,里面装着车速信号,跑在 CAN 总线上。ADAS 控制器要用这个车速信号,但它接的是以太网。 两边协议不同,PDU 格式不同,谁来翻译?
这才是 Gateway 真正存在的理由。
Gateway ECU:不是门,是翻译站
在域集中式架构里,Gateway 是一台真实的嵌入式计算机——Tier1 供应商(Bosch、Continental、Aptiv)负责整机交付,底层芯片则来自 NXP(S32G 系列)、 Renesas 等 SoC 厂商。
它的职责不再是搬运 PDU,而是:
- 从 CAN 总线收到一个 PDU, 解包 出里面的信号值
- 把信号值按以太网的规则 重新打包 成新的 PDU
- 把新 PDU 发送 到以太网
这三步,分别由两个 AUTOSAR 模块承担。
域集中式的幕后机制:COM 和 PduR
一句话先说清楚分工: COM 是翻译,PduR 是快递员 。翻译负责理解内容,快递员只管送到地方。
COM:理解内容的打包工
COM(Communication Module)负责信号和 PDU 之间的双向转换。
接收方向:从 CAN PDU 里,按照 ARXML 定义的位位置和缩放规则,把字节还原成有意义的信号值——"这 16 个字节,乘以 0.1,得到车速 = 120.0 km/h"。
发送方向:拿到信号值,按照以太网 PDU 的格式要求,把它塞进对应字节位置,换一种编码方式写进去。
COM 不知道底层是 CAN 还是以太网 。它眼里只有信号值和 PDU 格式,物理介质是什么不是它管的事。
更关键的: COM 可以把同一个信号同时映射到两个不同格式的 PDU ——一个 CAN 格式,一个以太网格式。这正是跨域信号同步的核心机制。
换个角度理解:Gateway 不是"知道车速是 120,然后用不同语言重新说一遍",而是"机械地按 ARXML 定义的规则,把一堆字节从一种格式搬到另一种格式"。规则对了,语义自然对了。
PduR:不看内容的快递分拣员
PduR(PDU Router)负责 PDU 的路由——决定一个 PDU 从哪里来、发往哪里。
它维护一张路由表,逻辑很简单:
CanIf 收到的 PDU_0x064 → 发给 COM
COM 生成的 EthPDU_Speed → 发给 SoAd(以太网接口层)
PduR 不修改 PDU 的任何内容 。它只看 PDU 的 ID,查表,转发,完事。它不知道 PDU 里装的是车速还是转速,也不在乎。
PduR 还支持一对多路由——同一个 PDU 可以同时被转发到多个目标,比如既给 COM 处理,又给诊断模块抓包。
完整的跨域信号流
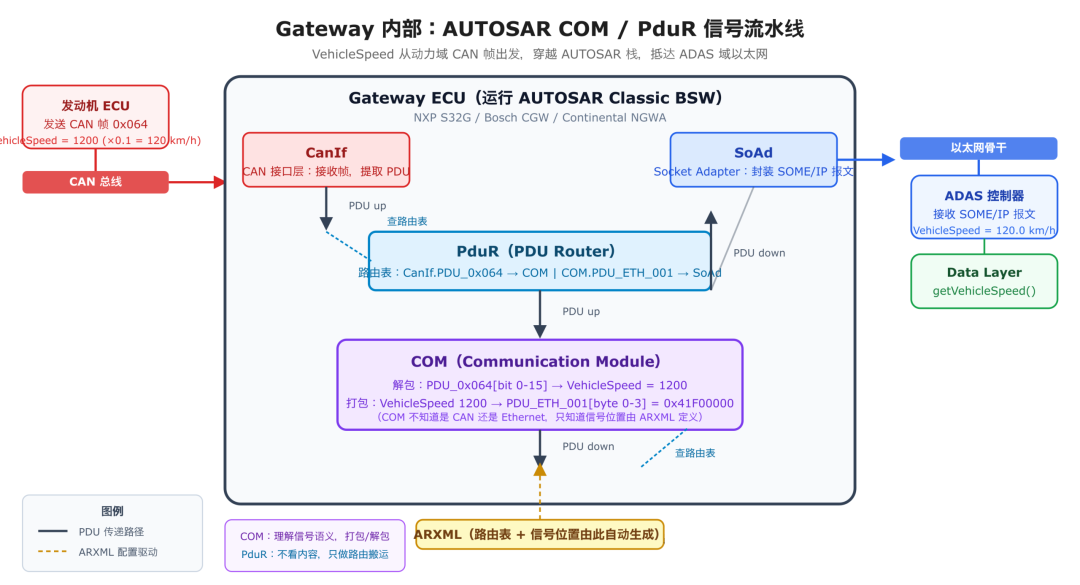
AUTOSAR COM/PduR 信号流水线
Gateway 内部流水线:VehicleSpeed 的格式变身
整条流水线,没有一行是"手写逻辑"——所有工位的操作规则,都来自同一份配置文件:ARXML。
ARXML:那张让一切能工作的规则表
DBC 不够用了
在只有 CAN 的年代,DBC 文件够用:一个文本文件,一行定义一个信号。
到了域集中式,问题变了:同一个 VehicleSpeed 信号,在 CAN 上的编码方式(16 位整数,小端,×0.1)和在以太网上的编码方式(32 位浮点,大端)完全不同。DBC 只能描述单条总线,描述不了"同一个信号在两条总线上的不同形态"。
ARXML 解决了这个问题。
ARXML 的三层结构
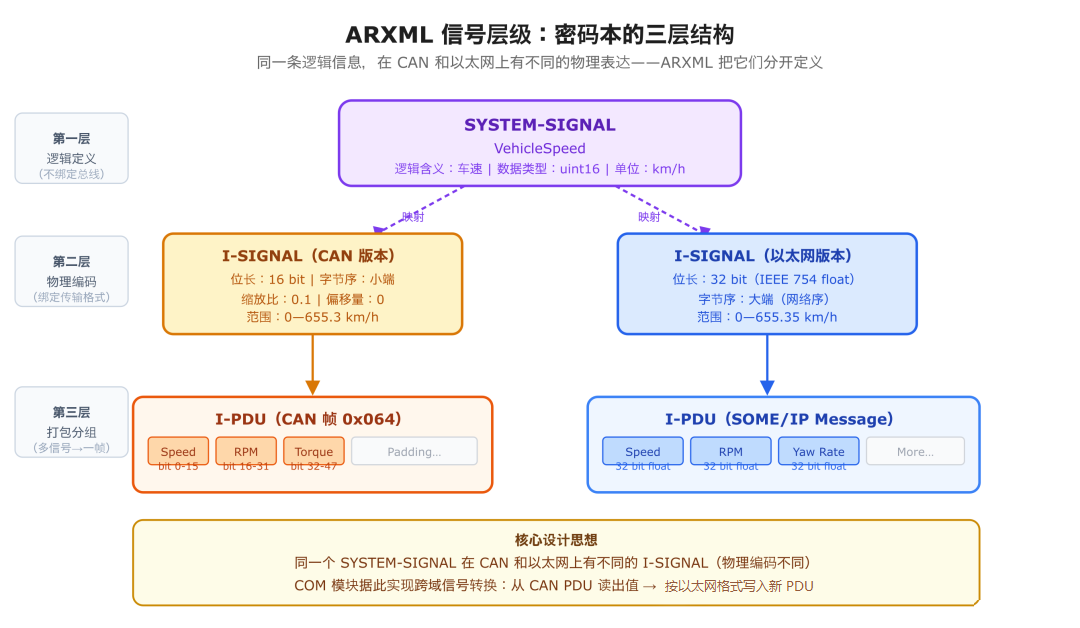
ARXML 把一个信号的定义分成三层。用 VehicleSpeed 贯穿来说:
ARXML 信号层级结构
第一层,SYSTEM-SIGNAL :信号的逻辑身份,不属于任何总线。"VehicleSpeed,表示车速,数据类型 uint16,单位 km/h"——只是一个概念,还没有决定它在哪条线上跑、怎么编码。
第二层,I-SIGNAL(Implementation Signal) :同一个 VehicleSpeed,在 CAN 上是一种形态(16 位整数,缩放比 0.1,偏移量 0),在以太网上是另一种形态(32 位浮点)。两个 I-SIGNAL 指向同一条逻辑信息——这正是 COM 能做跨域映射的依据:从 CAN I-SIGNAL 读出值,按以太网 I-SIGNAL 写入新格式,语义不变,格式变了。
第三层,I-PDU :就是某条总线上的具体信封——"CAN 帧 0x064:第 0-15 位放 VehicleSpeed,第 16-31 位放 EngineRPM"。多个信号打包进一个传输单元,决定信号"住哪个房间"、"住在哪个位置"。
ARXML 是整个系统的唯一权威来源(Single Source of Truth) ——COM 的打包规则从这里来,PduR 的路由表从这里来,Gateway 固件从这里自动生成。工具(比如 Vector DaVinci Configurator)读入 ARXML,生成所有 BSW 配置代码,工程师不手写路由逻辑。
完整的一次旅程:车速 120 km/h 从发动机到 ADAS
概念讲完了,用一个完整的例子把它们串起来。场景:发动机 ECU 实时发送车速信号,ADAS 控制器需要读到这个值做决策。两边协议不同——一边 CAN,一边以太网。
第一步:ARXML 定义规则(设计时,不是运行时)
工程师还没开始焊板子之前,整车网络的规则就已经写进了 ARXML。对 VehicleSpeed 这条信号,ARXML 里有三件东西:
SYSTEM-SIGNAL (信号的逻辑身份):VehicleSpeed,数据类型 uint16,单位 km/h。这一层不属于任何总线,只是说"这个信号是什么意思"。
两个 I-SIGNAL (同一信号在不同总线上的物理编码):
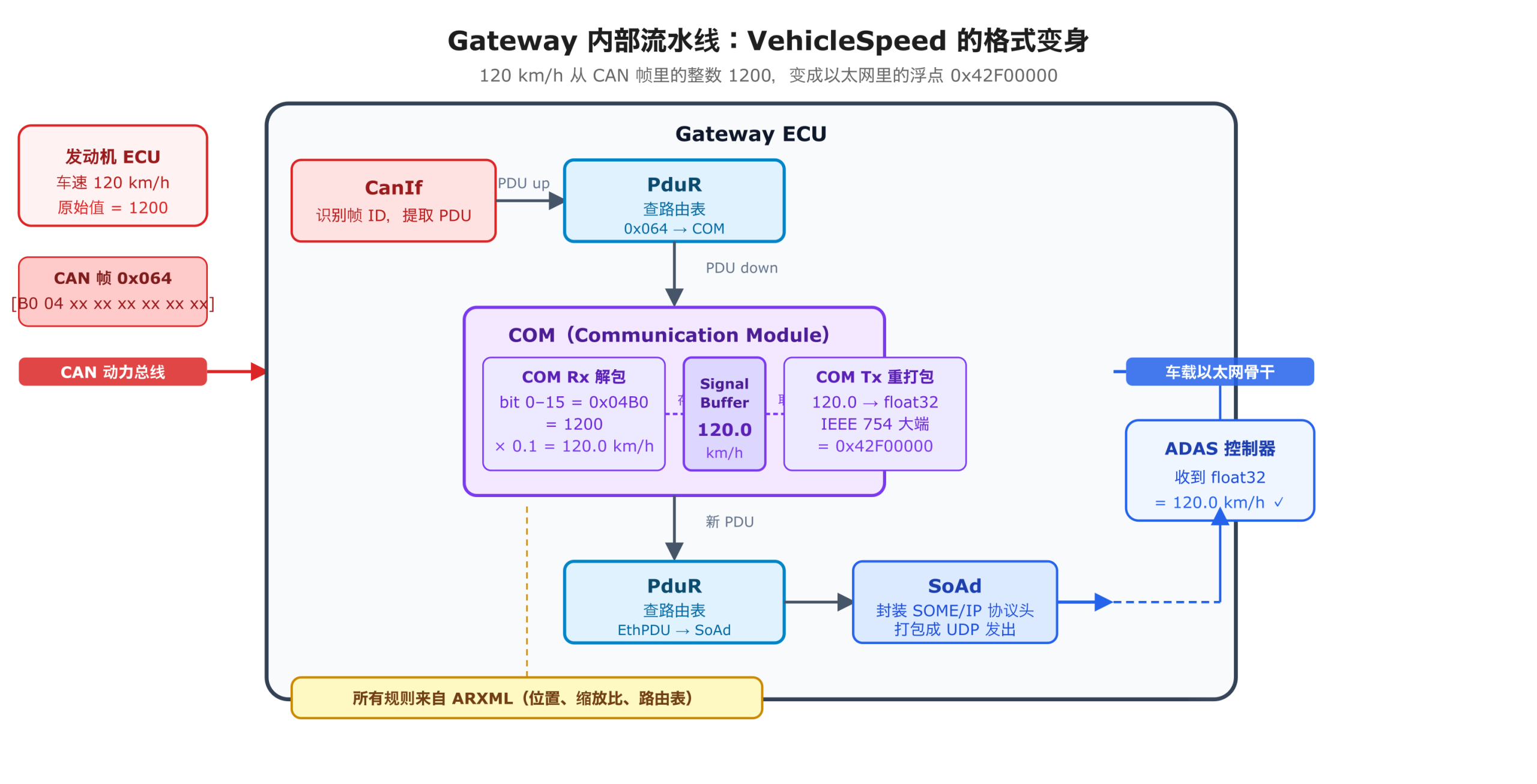
- CAN 版本:16 位整数,小端字节序,缩放比 0.1,偏移量 0。意思是:CAN 帧里的原始整数值 × 0.1 = 实际车速 km/h。车速 120 km/h 对应原始值 1200。
- 以太网版本:32 位 IEEE 754 单精度浮点,大端字节序。直接存 120.0,不需要缩放。
I-PDU (信号打包进传输帧的规则):CAN 帧 ID 0x064,总长 8 字节:bit 0–15 放 VehicleSpeed,bit 16–31 放 EngineRPM,剩余字节补 0。
还有一张 PduR 路由表,也是从 ARXML 自动生成的:收到 CAN PDU_0x064 → 交给 COM;COM 处理完输出的以太网 PDU → 交给 SoAd 发出去。
DaVinci Configurator 的工作 :读进这份 ARXML,自动生成 Gateway 固件里的所有配置代码——COM 知道从 bit 0 开始读 16 位乘以 0.1,PduR 知道 0x064 路由去哪里,SoAd 知道往哪个 IP 发。工程师不写这些逻辑,工具生成。
第二步:发动机 ECU 发出 CAN 帧(运行时)
车跑起来了,发动机 ECU 每 10 ms 发一次车速数据。此时车速 120 km/h:
原始整数值 = 120 ÷ 0.1 = 1200 ,十六进制是 0x04B0 。CAN 用小端字节序,低字节在前: B0 04 。
发动机 ECU 把这两个字节放进帧 0x064 的 bit 0–15,后面拼上转速、扭矩等其他信号,组成一个 8 字节的 CAN 帧,往动力总线上一扔,总线上所有节点都收到。
第三步:Gateway 拆包、转换、重打包(运行时)
Gateway ECU 的 CAN 接口收到帧 0x064,触发一系列处理:
CanIf :识别到这是 ID = 0x064 的帧,提取出 8 字节数据,封装成 PDU,往上交给 PduR。
PduR :查路由表——PDU_0x064 应该交给 COM 处理。转过去。
COM(接收方向) :按 ARXML 的定义,从 bit 0 开始读 16 位 = 0x04B0 = 1200 ,乘以缩放比 0.1,得到 VehicleSpeed = 120.0 km/h 。这个值存进 Signal Buffer。
COM(发送方向) :从 Signal Buffer 取出 120.0,按以太网 I-SIGNAL 的定义,转成 32 位 IEEE 754 浮点数 = 0x42F00000 ,写入以太网 PDU 的前 4 字节。
PduR :查路由表——这个以太网 PDU 交给 SoAd。
SoAd :把 PDU 封装成 SOME/IP 报文,加上协议头(服务 ID、方法 ID、长度等),打包成 UDP 包,通过以太网接口发出。
整条路径,Gateway 没有任何"知道这是车速"的意识——它只是按照 ARXML 定义的规则,把字节从一个格式搬到另一个格式。规则对了,语义自然对了。
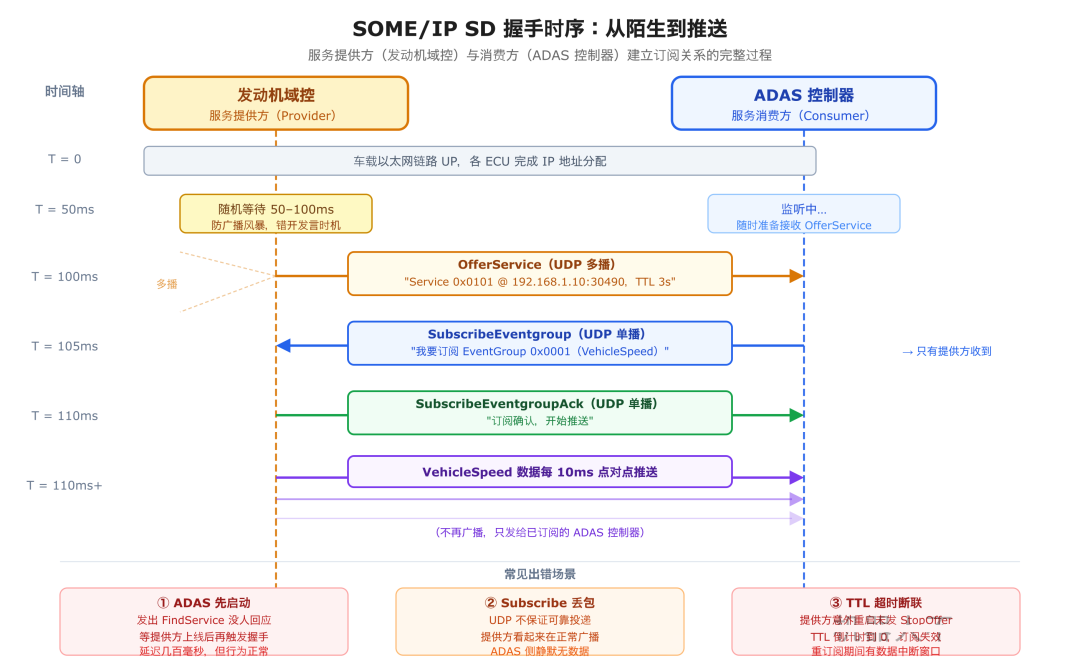
第四步:SOME/IP SD 的完整握手逻辑
ADAS 控制器能收到这个 SOME/IP 报文,前提是在车辆启动时完成了一次服务发现握手。这套协议叫 SOME/IP SD(Service Discovery) ,定义了两类角色: 服务提供方 (谁有数据)和 服务消费方 (谁要数据),以及它们之间通信的顺序。
用车速这个例子,提供方是发动机域控(或代理它的 Gateway),消费方是 ADAS 控制器。
SOME/IP SD 握手时序
提供方的持续行为: 订阅建立后,发动机域控不会停止广播 OfferService。它会按更长的周期(比如每 1 秒)继续广播,让后来启动的 ECU 也能发现并订阅。每次广播都带着 TTL——消费方必须在 TTL 超时前收到新的 Offer,否则视为服务下线。
三种常见的出错场景:
场景一:ADAS 比发动机域控启动早 ADAS 上电后发出 FindService 广播——"谁有 Service 0x0101?"。发动机域控还没启动,没人回应。ADAS 进入等待,每隔一段时间重发 FindService。等发动机域控上线、发出 OfferService,ADAS 收到之后才触发 Subscribe。这个过程正常,但会有几百毫秒的延迟。
场景二:SubscribeEventgroup 丢包 SOME/IP SD 跑在 UDP 上,UDP 不保证可靠送达。ADAS 发出 Subscribe,网络丢包,提供方没收到。ADAS 等不到 Ack,会重发。但如果重发也丢了,订阅就没建立,ADAS 从来收不到数据——而且从日志上看,发动机域控持续在广播 OfferService,"看起来一切正常",只是 ADAS 侧静默没数据。这类问题在 CANoe 里用 SOME/IP 插件才能看到 Subscribe 有没有被 Ack。
场景三:TTL 超时后重订阅 发动机域控意外重启,没有发出 StopOfferService 通知(比如断电)。ADAS 还以为订阅有效,但 TTL 倒计时到 0,服务失效。ADAS 需要重新等 OfferService、重新 Subscribe。这个重订阅过程里,有一段时间窗口 ADAS 收不到车速数据——窗口长短取决于 TTL 和 OfferService 广播周期的配置。
与第二代 Gateway 的本质区别: 域集中式里,不存在这套握手。Gateway 固件一启动,路由表就生效——CAN 帧只要到了,立刻按表转发,没有"订阅没建立"这个状态。代价是路由是死的,加一个新 ECU 就要重新刷固件。
SOME/IP SD 的复杂度,是为动态路由付出的代价。
第五步:NCD 是工程师看这整件事的窗口
NCD 视图(在 CANoe 或 CANdb++ 里)把 ARXML 的内容可视化:工程师能看到 VehicleSpeed 挂在帧 0x064 的 bit 0,factor = 0.1,来源 ECU 是发动机域,接收方包括 ADAS 控制器。
调试时的用法:怀疑 ADAS 收到的车速有问题,先在 NCD 里确认信号定义——factor 是否是 0.1?帧 ID 对不对?接收方列表里有没有 ADAS?然后在 CAN 总线上抓包,验证原始值是否符合预期(车速 120 时应该看到 1200 = 0x04B0)。再到以太网侧用 Wireshark 确认 SOME/IP 报文里的字节是否是 0x42F00000。
如果 ARXML 改了但 Data Layer 没同步
ARXML 里 VehicleSpeed 的 scale 从 0.1 改成 0.01(为了更高精度,原始值范围从 0–65535 扩大到有效值 0–655.35 km/h)。
Gateway 固件重新生成:COM 现在读出 1200,乘以 0.01 = 12.0 km/h ,以太网 PDU 里写的是 12.0。
Data Layer 没有更新,它的 getVehicleSpeed() 还在用旧的 scale 0.1 解析:把收到的 12.0 当原始整数,乘以 0.1,返回 1.2 km/h 。
CAN 总线上的帧看起来完全正常,SOME/IP 报文格式也没问题,只有 ADAS 的应用层在用一个错得离谱的车速做决策——而且这种错误测试时往往发现不了,因为测试用例用的是旧版 ARXML。
这就是为什么 ARXML 版本管理是整车网络开发里最难的工程问题之一。
NCD:工程师看规则表的那扇窗
NCD 是什么
ARXML 规模可以非常庞大——整车网络定义几万行是常态,这种规模的配置不可能靠人肉管理。工程师需要一个可视化工具把它展示出来,让人能看懂、能调试。这就是 NCD 的角色。
NCD 是工具链里对网络配置的可视化视图。在 Vector 工具链(CANdb++、CANoe)里,工程师导入 ARXML 后看到的信号列表、PDU 映射、网络拓扑,就是 NCD 视图;NI 工具链有自己的 NCD 格式,用于 NI-XNET 工具。
NCD 是 ARXML 在工具里的投影,不是源头。
工程师用 NCD 做什么?调试。"我怀疑 VehicleSpeed 没有正确路由到 ADAS 域"——打开 CANoe,在 NCD 视图里找到这条信号,看它的 PDU 归属、发送方 ECU、接收方列表、更新周期。这比翻 ARXML 的 XML 文本快得多。
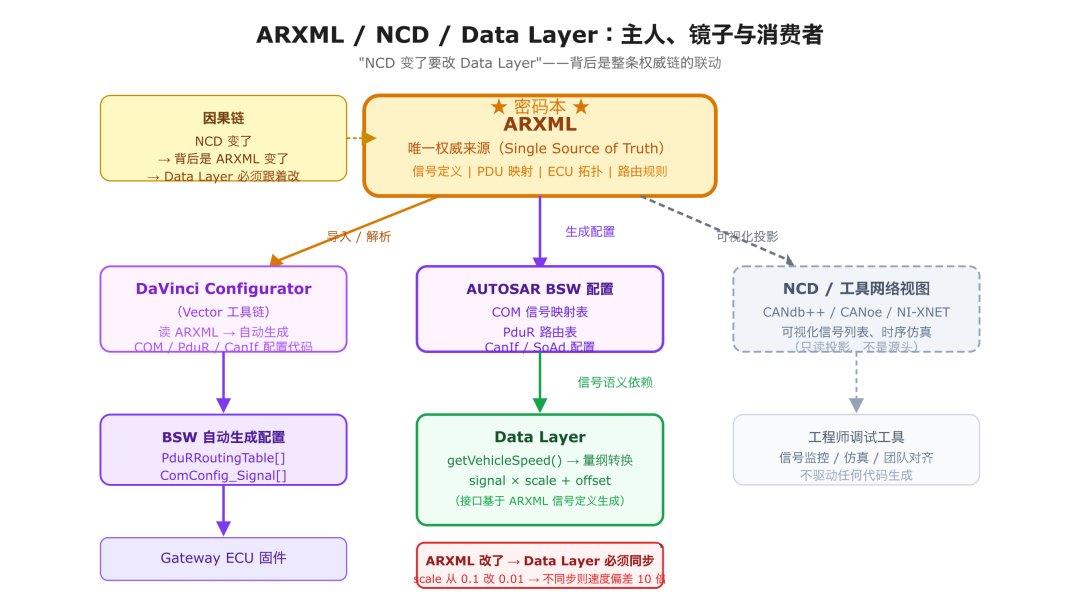
"NCD 变了要改 Data Layer"的真实含义
这是工程师最常踩的坑,背后的因果链是:
NCD 视图变了 → 说明有人更新了 ARXML(信号 scale 变了,PDU 位置变了,来源 ECU 变了)→ Data Layer 依赖 ARXML 定义的信号语义 → Data Layer 必须同步更新
Data Layer 是应用层的信号接口封装,提供 getVehicleSpeed() 这样的函数,内部按 ARXML 的 scale/offset 做量纲转换。ARXML 里 VehicleSpeed 的 scale 从 0.1 改成了 0.01,Data Layer 没更新,应用拿到的车速就偏大 10 倍——信号在总线上"看起来正确",只有应用消费之后才出错。
不是 NCD 驱动了变更,是 ARXML 驱动了变更。NCD 是让你看到这个变化的窗口,不是原因。
ARXML / NCD / Data Layer 关系
第三代:区域式架构——Gateway 被软件消解
物理形态的变化
域集中式架构里,Gateway 是一台专用硬件 ECU——一块 PCB,装在发动机舱,连着数十根 CAN 线和以太网线。
区域式架构里,这台专用硬件消失了。
取而代之的是:
- Zonal Gateway(区域网关) :每个物理区域(前左/前右/后左/后右)各一个,负责汇聚本区域所有 ECU 的信号,通过一根高速以太网上联到中央计算平台。线束不再按功能走,而是 按物理距离走 ——这是 Tesla 把线束从 1.5 km 压到目标 100 m 的根本逻辑。
- Central Vehicle Server(中央计算平台) :统一运行路由逻辑,传统 Gateway ECU 的职责变成了它上面的一个软件进程。
软件模型的根本转变:从广播到订阅
这是整件事里最深的变化。
域集中式 Gateway 的工作方式本质上还是 CAN 时代的逻辑: 广播 。发动机 ECU 持续发送车速 PDU,Gateway 收到就按路由表转发,不管 ADAS 域需不需要。PduR 的路由表在固件里写死,出厂后不变。
区域式架构引入了 SOME/IP ,带来了完全不同的交互模型: 订阅 。
SOME/IP(Scalable service-Oriented MiddlewarE over IP)的核心逻辑是:
不再是"我发,你爱听不听",而是"你先告诉我你需要什么,我才发给你"。
具体机制:提供车速信号的发动机 ECU 启动后广播一条 "Offer"——"我有 VehicleSpeed 服务,谁需要可以来订阅"。ADAS 控制器收到之后发一条 "Subscribe",双方直接建立连接,之后车速数据就点对点推送过来。
不像第二代的静态路由,SOME/IP 的服务发现是车内设备自己找到彼此——Offer/Subscribe 去中心化协商。数据流的实际路径取决于网络拓扑,可能点对点直达,也可能经过 Central Vehicle Server 的交换节点,但路由关系是运行时动态协商出来的,而不是设计时写死的。
这个转变对 Gateway 意味着什么?
静态路由表消失了 。域集中式的 PduR 路由表是编译进固件的常量——加一个新 ECU 就要重新生成配置、重新刷写固件。SOME/IP 下,路由在运行时动态协商——插一个新传感器,它广播 Offer,有需要的 ECU 来订阅,不需要重新编译任何东西。
代价是复杂度:AUTOSAR Adaptive(运行 SOME/IP 的软件平台)比 Classic 复杂得多,实时性保证和安全隔离的工程成本更高。这是为什么今天大多数量产车仍然跑域集中式 Classic 架构,区域式的大规模量产预计要到 2030 年以后。
第二代用了整篇文章最多的篇幅,不是偶然 ——它是你目前实际遇到的 90% 的车辆架构,COM/PduR/ARXML 也是最可能在工作中直接碰到的那一层。
Gateway 三代对比
| 第一代:分布式 | 第二代:域集中式 | 第三代:区域式 |
| Gateway 形态 |
简单消息过滤器 |
专用 ECU(Bosch/Continental/NXP S32G) |
软件功能,运行在 Zonal GW 或 Central Server |
| 信号交互模型 |
CAN 广播,全员可见 |
跨域时 COM 解包重打包 |
SOME/IP 订阅,按需推送 |
| 路由配置时机 |
设计时手写 |
设计时由 ARXML 自动生成,编译进固件 |
运行时动态注册 |
| 规则来源 |
DBC(人工维护) |
ARXML(工具自动生成配置) |
ARXML + SOME/IP 服务接口定义 |
| 加新 ECU 的代价 |
修改 DBC,重新布线 |
修改 ARXML,重新生成固件 |
向 Central Server 注册,路由自动生成 |
收束:Gateway 变了三代,但它解决的问题从未变过
三代 E/E 架构里,Gateway 的物理形态变了,软件机制变了,但它存在的根本原因从没变过:
车里有不止一个通信域,域和域之间的信息交换需要一个中间人。
第一代:域几乎不存在,Gateway 是个哑巴门。
第二代:域之间协议不同,Gateway 成为真正的翻译官——由 ARXML 定义规则,由 COM/PduR 执行,由 NCD 供工程师调试。
第三代:域的物理边界模糊了,但信息隔离和按需路由的需求更强了,Gateway 从硬件变成了软件,从静态路由变成了动态订阅。
规则书的名字从 DBC 变成了 ARXML,再加上 SOME/IP 服务接口——但规则书从来没有消失,只是变得更复杂、更自动化了。
改一个 scale 值,从 0.1 变成 0.01,如果 Data Layer 没有同步,整车的车速读数就会错 10 倍。信号在总线上看起来完全正常,应用层却在用一个错误的数字做决策。这就是规则书的重量——写进去的每一行,都是真实跑在路上的车的行为。
| 






 订阅
订阅