| 编辑推荐: |
本文将从AUTOSAR分层架构全景出发,系统拆解RTE的四大核心职责、三大接口类型、Runnable调度机制,以及多核通信的实际门道。读完这篇,你对RTE的理解会提升一个量级。希望对你的学习有帮助。
本文来自于微信公众号从零学嵌入式 ,由火龙果软件Alice编辑,推荐。 |
|
导读:RTE(Runtime Environment,运行时环境)是AUTOSAR架构中最核心、最抽象的概念,也是无数嵌入式工程师面试时被问到"请讲讲你对RTE的理解"时最容易卡壳的模块。本文将从AUTOSAR分层架构全景出发,系统拆解RTE的四大核心职责、三大接口类型、Runnable调度机制,以及多核通信的实际门道。读完这篇,你对RTE的理解会提升一个量级。
一、为什么AUTOSAR要做分层?先画一张全局地图
在聊RTE之前,必须先理解一件事:为什么AUTOSAR要把软件架构分成这么多层?
传统ECU软件开发,上层应用和底层硬件是"强绑定"关系——写应用的人得懂MCU寄存器、看门狗配置、CAN控制器原理。一旦换了芯片,整个软件几乎要重写。这在车型少、功能简单的年代还能接受,但到了今天一辆车几十个ECU、每年更新换代,这种模式就是灾难。
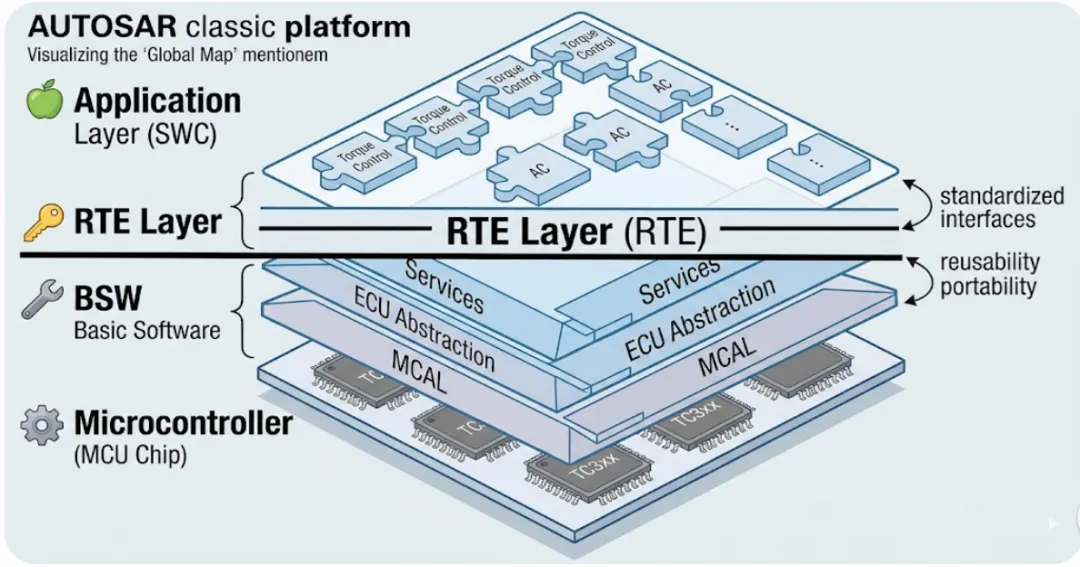
AUTOSAR的核心思想就一句话:让做应用的人不用关心底层硬件,让做底层的人不用关心上层业务。通过分层和标准化接口,实现软件的可复用、可移植。分层架构如下:
| 层级 |
核心模块 |
职责 |
| 应用层 |
SWC(软件组件) |
实现整车业务逻辑(扭矩控制、空调算法等) |
| RTE层 |
RTE |
应用层与BSW之间的"翻译官"和"调度器" |
| BSW基础软件 |
服务层(Services) |
OS、Com、Dcm、Dem、NvM等通用服务 |
| ECU抽象层(ECU Abstraction) |
CanIf、PduR、CanSM等 |
| MCAL(微控制器抽象层) |
Can、Spi、Dio、Mcu等 |
| 微控制器 |
MCU芯片 |
硬件本身(英飞凌TC3xx、瑞萨RH850等) |
可以看到,RTE是整个架构中唯一位于应用层之下的、承上启下的中间层。它上面是"天马行空"的应用逻辑,下面是"精密严谨"的基础软件。它的存在,让应用开发和底层开发可以真正并行,也正是AUTOSAR分层思想最彻底的体现。
举一个形象的例子:把AUTOSAR架构想象成一家医院。应用层是各个科室的医生(看症状、下诊断),BSW是检查设备和药房(CT机、药房库存),MCAL是机器内部的电路板,而RTE就是挂号分诊台和护士站——医生不需要知道CT机怎么启动,设备科不需要知道病人得了什么病,一切通过分诊台标准化对接。
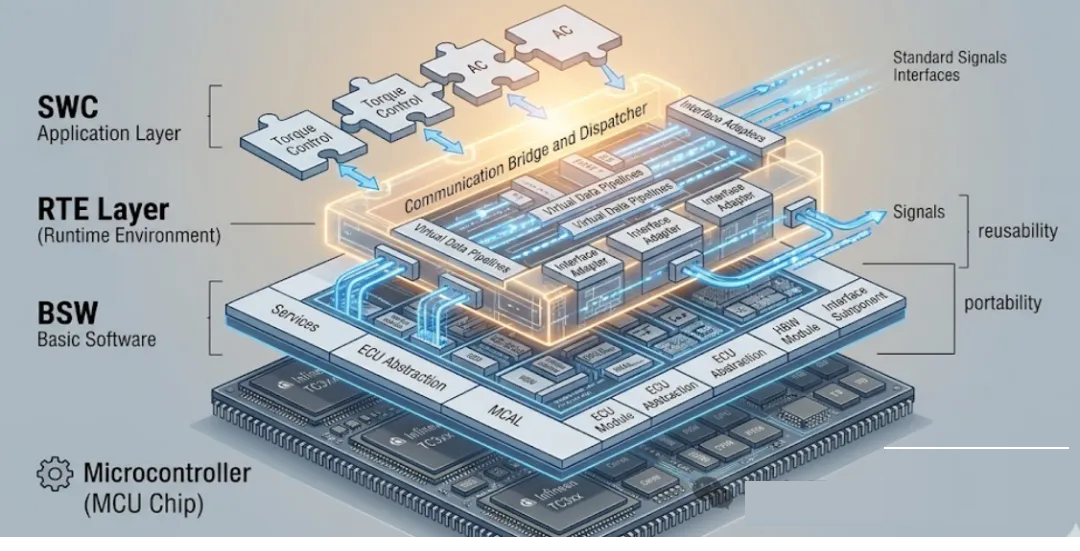
二、RTE四大核心职责:从通信桥梁到数据中枢
RTE在AUTOSAR架构中承担着远比"传话"更丰富的职责。RTE的核心能力可以归纳为四大类:
2.1 职责一:数据缓冲(Buffer)—— 最朴素的全局变量
RTE最基础的作用,是作为一块"共享内存",供上层SWC和下层COM之间的数据读写。
举个例子:ECU收到一帧CAN报文,数据到达RTE的路径是:
CAN总线 → Can Driver → CanIf → PduR → Com → RTE → SWC
这其中,RTE的Buffer就像一个双方约定好的"数据中转站":上层SWC不需要关心这帧报文是CAN来的还是LIN来的,只需要调用Rte_Read()从Buffer里取数据;下层COM也不需要关心上层是哪个SWC在用,只需要往Buffer里写数据。
这就是AUTOSAR分层解耦思想的直接体现——双方只看接口,不问来路。
2.2 职责二:数据软处理—— 比"传话"多一点
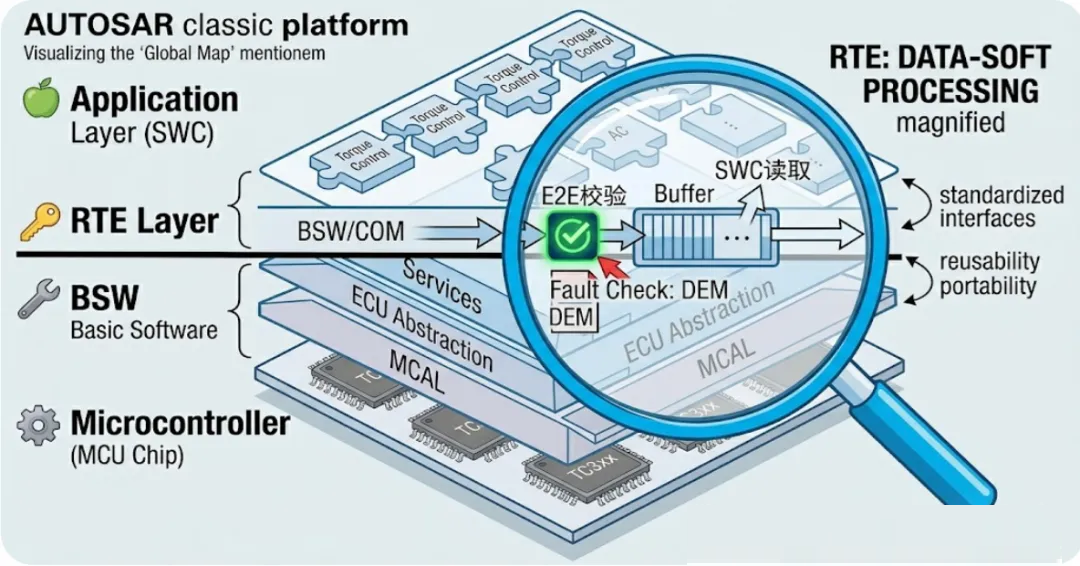
RTE不仅是数据的搬运工,还能对数据进行轻量级处理。最典型的例子是E2E(End-to-End)校验。
当一帧CAN报文触发COM回调后,RTE在把数据写入Buffer之前,会先做E2E校验——检查数据在传输过程中是否被篡改、是否完整。如果校验通过,数据才写入Buffer供SWC使用;如果校验失败,RTE可以触发DEM模块记录故障码。
整个流程如下:
Com回调 → Rte_Read(信号组) → E2E校验 → 校验通过 → Rte_Write(Buffer)
→ SWC读取
这种"接收→校验→写Buffer→应用读取"的模式,比直接裸传要安全得多,也是汽车功能安全的基本要求。
2.3 职责三:故障上报通道—— RTE也管"报警"
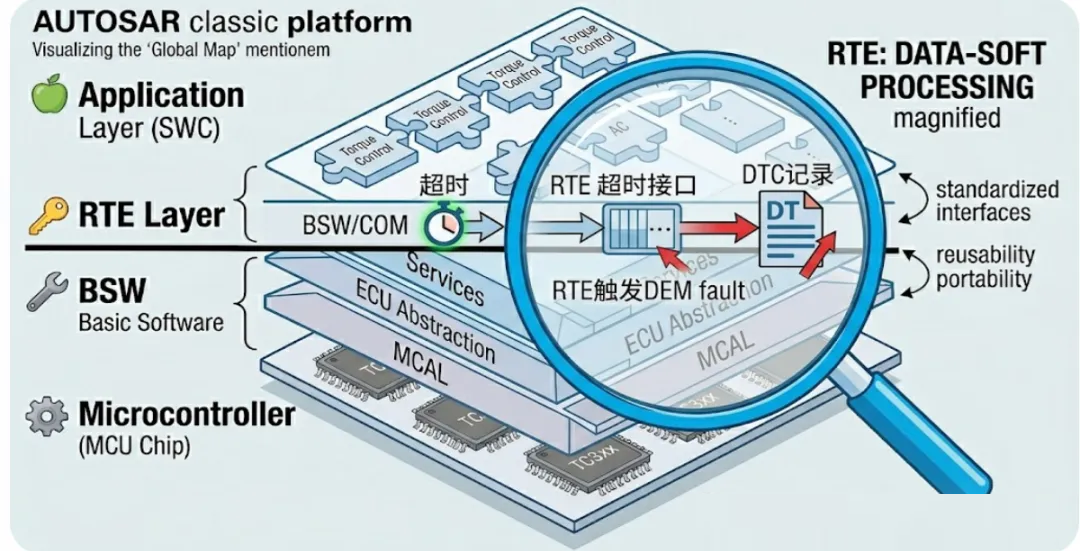
RTE还能承担故障监控的通道角色。当底层检测到异常(如某个信号长期超时),会逐层上报:
Com超时 → RTE超时接口 → RTE触发DEM fault → DTC记录
这种设计让故障处理也遵循同样的分层原则:应用层不需要关心超时是怎么检测的,基础软件也不需要知道故障要怎么存储——双方各司其职,通过RTE的标准化接口连接。
2.4 职责四:多SWC共享—— 一个Buffer,多人围观
同一个RTE Buffer,可以被多个Runnable(SWC中的可执行单元)同时访问。这是RTE区别于普通全局变量的重要特性。
比如车速信号被多个SWC需要——仪表盘SWC要显示,制动系统SWC要参考,ADAS SWC要用于计算——这些SWC只需要各自调用Rte_Read("VehicleSpeed"),就能从同一个Buffer里读到最新数据,而不需要关心数据是谁写的、存在哪里。
⚠️ 特别提醒:多SWC访问同一个Buffer时,RTE内部有资源锁机制防止数据竞争(Race Condition)。在实际工程中,理解RTE的锁粒度(Lock
Granularity)非常重要——锁得太粗影响性能,锁得太细又容易漏掉某些边界情况。这也是很多ECU"偶发抖数据"问题的根源之一。
三、三大接口类型:搞懂SR和CS就够用了
RTE提供了多种标准接口类型,在AUTOSAR的arxml配置文件中通过不同XML元素声明。日常开发中最常用的是以下三种:
3.1 Sender-Receiver(SR通信):信号传递的标配
SR接口是AUTOSAR中使用最广泛的通信方式,专门用于"信号传递"——就像快递员把包裹从一个地方送到另一个地方。
在SR通信中,存在: -
发送方(PPort):负责生产数据的一方,通过Rte_Write()把数据"投递"出去
- 接收方(RPort):负责消费数据的一方,通过Rte_Read()从Buffer中取数据
SR通信又分为显式(Explicit)和隐式(Implicit)两种方式,这个区别在实际开发中非常重要:
| 特性 |
显式通信(Explicit) |
隐式通信(Implicit) |
| arxml定义 |
DATA-SEND-POINT |
Data read/write access |
| 生成代码 |
函数调用(Rte_IWrite) |
宏定义(Rte_IRead) |
| 是否支持队列 |
✅ 支持 |
❌ 不支持 |
| 适用场景 |
数据需要异步传输、多包缓冲 |
周期性强一致性数据(如CAN信号组) |
| 数据一致性 |
在函数调用时读取 |
在Runnable入口自动拷贝到本地Buffer |
隐式通信为什么能保证一致性?因为RTE在Runnable开始执行前,会把要读取的所有信号一次性拷贝到该Runnable的本地缓存中——在整个Runnable执行过程中,外部对Buffer的写入不会影响本地缓存的数据,从而保证了数据的"时间一致性"。
这解决了一个实际问题:一帧CAN报文包含8个信号,在一个Runnable处理这8个信号的过程中,如果其中一个信号被外部更新了(新的报文到达),会导致8个信号的"时间戳"不一致。隐式通信彻底规避了这个问题。
3.2 Client-Server(CS通信):函数调用的桥梁
CS接口用于"函数调用"——不是传递数据,而是执行一段逻辑。
最经典的例子就是看门狗喂狗服务:应用SWC调用Rte_Call_WdgM_Checkpoint(),触发WdgM模块的检查点函数执行。如果检查通过,WdgM认为系统"还活着",继续正常运行;如果超时,WdgM触发复位。
CS通信的特点: -
调用方是Client(客户端),被调用方是Server(服务器)
- 可以是同步(调用后等待返回)或异步(调用后立即返回,通过回调通知结果)
- Server端可以有队列,防止高频调用丢失
SR和CS的核心区别一句话总结:SR传的是数据,CS调的是功能。在配置arxml时,先判断这个交互是"传递数据"还是"触发函数",就能决定用哪种接口。
3.3 Nv-Data接口与Calibration接口
Nv-Data接口用于NVM存储的数据读写——某些数据需要在掉电后保持,AUTOSAR通过Nv-Data接口让SWC透明地访问这些"永久变量",而不需要关心底层Flash管理的复杂性。
Calibration接口用于标定数据的访问——标定工程师在实验室调参数时,通过这个接口读写标定变量,量产时这些变量变成只读。
✅ 实战建议:面试时问到RTE接口,只要能把SR和CS讲清楚、讲到位(Explicit vs Implicit的细节要说),就已经超过80%的候选人了。Nv-Data和Calibration了解即可。
四、Runnable调度:RTE和OS到底是什么关系
4.1 什么是Runnable?
在AUTOSAR中,Runnable Entity(运行实体)是SWC中可以被RTE调度的最小代码单元。一个SWC至少包含一个Runnable,也可以包含多个。
Runnable不是线程(Thread),也不是Task——它是Task中被RTE调用的一段代码。同一个Task中的多个Runnable按顺序执行,不同Task中的Runnable可能被OS调度器抢占执行。
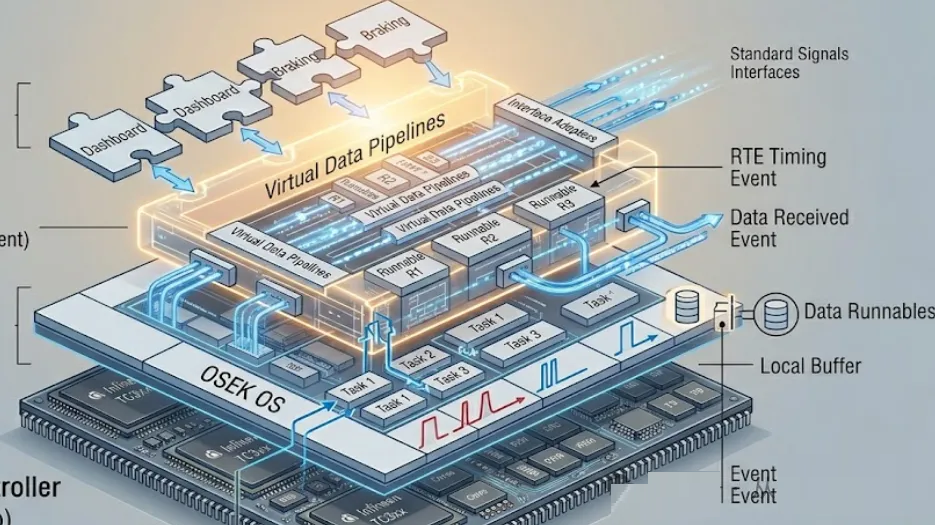
4.2 RTE如何触发Runnable?—— 三种Event
这是RTE调度机制的核心。RTE通过以下三种Event触发Runnable:
① 时间事件(Timing Event)
最常用的一种,就是"周期触发"——每隔固定时间执行一次。比如10ms周期、100ms周期。在arxml中为TimingEvent配置触发间隔,RTE根据OS的Tick进行调度。
② 数据接收事件(Data Received Event)
当Rte_Write()写入某个信号后,RTE自动触发绑定了该信号接收事件的Runnable执行。这就是AUTOSAR的"数据驱动"机制——不需要轮询,数据到了自然触发处理逻辑。
③ 模式切换事件(Mode Switch Event)
当系统模式发生变化(如从Normal切换到Diagnostic),RTE触发相关Runnable执行特定的处理逻辑。典型场景:进入诊断会话后禁用某些通信请求。
4.3 RTE和OS的协作关系
很多工程师有一个误解:RTE调度Runnable,OS调度Task,那RTE和OS哪个更大?
正确理解是:OS调度Task,Task中的Runnable由RTE调用。三者关系如下:
OS(调度器) → 激活Task → RTE(在Task内部) → 调用Runnable → 执行具体逻辑
打个比方:OS是"楼层管理员",决定哪个楼层(Task)在哪个时间段使用CPU;RTE是"房间分配员",决定在某个楼层开放期间,哪个房间(Runnable)可以进去、什么时候进去、进去后做什么。
在EcuM_StartupTwo函数执行时,会依次调用SchM_Init(初始化调度)和BswM_Init(初始化模式管理),这两个模块共同配合,确定了所有Task和Runnable的激活顺序与触发关系。
关键结论:RTE本身不创建Task,也不抢占CPU时间片——它只是"在正确的时机调用正确的代码"。Task的优先级、抢占策略由OS决定;Runnable的内容由SWC决定;两者的"连接件"就是RTE。
五、多核通信:RTE不只是一个核的事
5.1 为什么多核ECU需要特殊处理?
随着汽车电子功能越来越复杂,单核MCU已经无法满足算力需求。以英飞凌TC3xx为例,旗舰型号有6个CPU核心(TriCore架构),可以并行处理不同的功能域。
但多核带来一个新问题:同一个核的RAM,另一个核能直接访问吗?
答案是:能访问,但有代价。
5.2 同构多核 vs 异构多核
多核MCU分为两类:
同构多核(TC3xx等):所有核心是同一个架构(如TriCore),都跑OSEK OS。核间通信可以通过共享内存(Shared
Memory)实现——配置MemMap模块,把一块RAM映射为多个核共享。
异构多核(TDA4等):核心架构不同(如R核+A核),跑不同操作系统。核间通信必须通过IPC(Inter-Processor
Communication),底层基于COM模块的数据交互——本质上就是"跨ECU通信"的协议栈,只是把总线换成了芯片内部的高速互连。
5.3 多核共享RTE Buffer的正确方式
多核场景下,"一个Buffer多人围观"的RTE特性需要谨慎使用: -
同一核内多个Runnable访问同一个Buffer:RTE自动加锁,安全可靠
- 不同核访问同一个Buffer:必须通过共享内存(Shared Memory)显式配置,且要使用Spinlock或Semaphore保护临界区
- 跨核触发Runnable:不同核之间的Runnable无法直接调用,需要通过RTE的"核间触发机制"(通常基于中断或消息队列)
⚠️ 工程陷阱:很多工程师在多核ECU中"天真地"让Core0和Core1同时读写同一个RTE
Buffer,以为RTE会自动处理——结果就是偶发的数据错乱。AUTOSAR标准明确指出:跨核数据共享必须通过Shared
Memory显式配置,RTE不会自动为你解决跨核竞争问题。
六、总结:理解RTE的五个关键takeaway
回顾全文,RTE的学习需要抓住以下几个核心要点:
| # |
要点 |
一句话总结 |
| 1 |
定位:中间层 |
RTE是应用层和BSW之间唯一的"标准化通道" |
| 2 |
职责:数据中枢 |
不只是传数据,还做E2E校验、故障上报、Buffer管理 |
| 3 |
接口:SR是核心 |
Sender-Receiver的Explicit vs Implicit区别是面试高频考点 |
| 4 |
调度:依附OS |
RTE不建Task,只在Task内部调度Runnable;三Event触发要熟记 |
| 5 |
多核:边界意识 |
跨核共享必须用Shared Memory,RTE不处理跨核竞争 |
理解RTE,本质上是理解AUTOSAR"分层解耦、标准接口"这一核心理念在软件架构层面的具体落地。RTE把"做什么"(应用SWC)和"怎么做"(BSW/MCAL)彻底分开,才让汽车软件的规模化开发成为可能。
记住一句话:RTE是AUTOSAR的灵魂,接口是RTE的灵魂。搞懂了接口的语义和数据流向,你就搞懂了AUTOSAR软件架构的大半。 | 






 订阅
订阅