| 编辑推荐: |
本文主要介绍了自动驾驶
ECU 确定性调度体系:从核绑定到全栈可控架构相关内容。希望对你的学习有帮助。
本文来自于微信公众号汽车电子与软件
,由火龙果软件Alice编辑,推荐。 |
|
引言
那个让你长期困惑的“偶发延迟”
想象一个场景:你负责的自动驾驶项目路测一切顺利,数据回放也完美无缺。但就在某天,工程师一脸严肃地找到你,说在长达100小时的测试日志里,发现刹车控制指令有一次莫名的2毫秒延迟。
2毫秒,人眼根本无法察觉。但在高速行驶的车上,这意味着一两米的制动距离偏差。你看着日志,CPU利用率才40%,任务优先级已经拉满,关键任务也绑定了专用核心。所有常规优化手段都用了,问题出在哪?
这就是很多自动驾驶工程师的梦魇——系统看似稳定,但总存在“不确定的抖动”。我们
最常做的优化包括:
- 绑核(CPU Affinity)
- 提升优先级(SCHED_FIFO)
- 优化任务调度
这些手段确实有效,但如果你把问题停留在这里,会很快遇到一个现象:系统“看起来没问题”,但偶发延迟、抖动、甚至安全风险仍然存在。
根本原因在于:调度只是冰山一角。自动驾驶对“确定性”的追求,是一场从单点技术到全栈架构的系统性战役。今天,我们就来彻底拆解问题的传播路径:
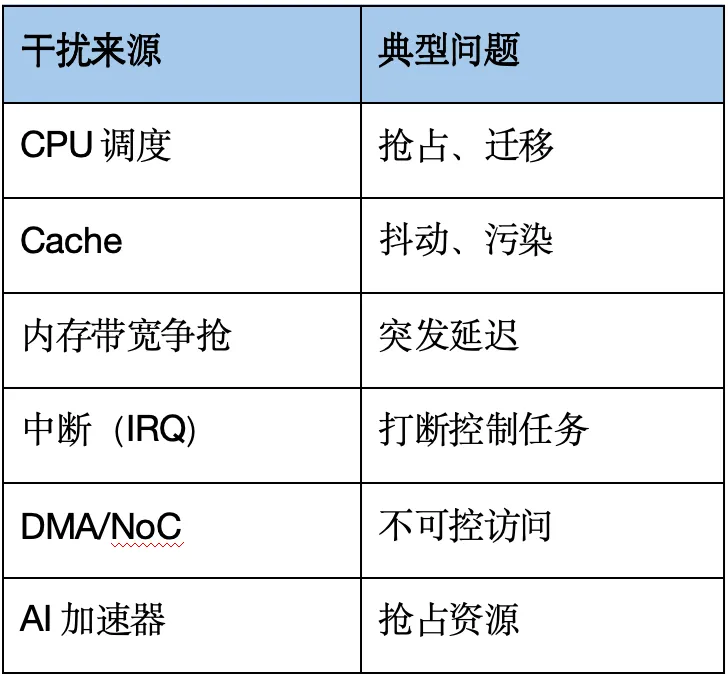
抖动来源链:CPU → Cache → Memory → IRQ → System
从核绑定出发,如何一步步构建一个真正“可控”的ECU确定性调度体系。
01 为什么绑核只是“安慰剂”?
问:我把激光雷达的处理线程绑在Core 0,优先级设为最高,这还不够吗?
答:这就像你给一位重要客人预订了酒店的一个房间(Core 0),并告诉所有人他是VIP(高优先级)。但这能保证他睡个好觉吗?不一定。因为:
1. Cache污染:Core 1上的AI模型推理,可能把共享的L3缓存(LLC)塞得满满当当。你的VIP线程一运行,发现缓存里的数据都被踢出去了,不得不去慢得多的内存里重新读取,造成延迟。
2. 内存带宽争抢:AI任务和海量数据传感器可能占满了通往内存的“高速公路”(内存带宽)。你的VIP线程虽然上了路,但被堵死在路上,寸步难行。
3. 中断干扰:网卡、CAN总线来的中断,可能随时打断VIP线程的休息。
所以,绑核只是第一步,它解决了“任务不会被别人赶到走廊里”的问题,但没解决“在房间里也被各种噪音干扰”的问题。
这意味着:核绑定只是第一层优化,真正的解决方案是“全栈确定性架构”。
02 自动驾驶确定性体系:
五层技术模型
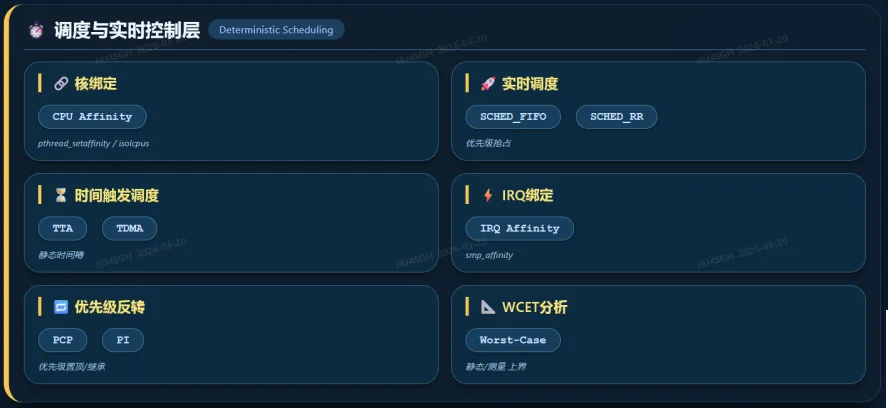
我们将调度问题上升为一个完整的系统模型:
注意:本文前面从“问题来源”角度(CPU → Cache → Memory → IRQ → System)展开,
而上图从“系统架构分层”角度进行抽象,两者是同一体系的不同视角。
2.1 CPU层:核绑定与实时调度(基础但不充分)
这确实是基础。目标:避免任务被抢占或迁移,我们通过 sched_setaffinity 把任务钉死在核心上,用
SCHED_FIFO 赋予它实时优先级,甚至用内核启动参数 isolcpus 把某些核心完全隔离出来,只运行指定任务。
为避免优先级反转问题,需要引入 PCP(优先级天花板协议)或 PI(优先级继承机制),确保高优先级任务不会被低优先级任务间接阻塞。
核心技术:
- sched_setaffinity
- SCHED_FIFO / SCHED_RR
- isolcpus / cpuset
作用:
- 降低上下文切换
- 提升响应优先级
- 固定执行位置,防止缓存失效
局限性:即使绑核,系统仍然可能抖动(原因在下面几层),因为它控制不了共享资源。
2.2 Cache层:缓存隔离(决定实时性的关键因素)
这是很多工程师容易忽略的“性能黑洞”。
问题核心:现代多核SoC的最后一级缓存(LLC)通常是共享的。一个核心上的任务,会悄无声息地把另一个核心上关键任务的缓存数据“挤出去”。这导致关键任务每次运行时,都面临“缓存冷启动”,延迟剧烈抖动。
CPU 多级缓存基础知识补充
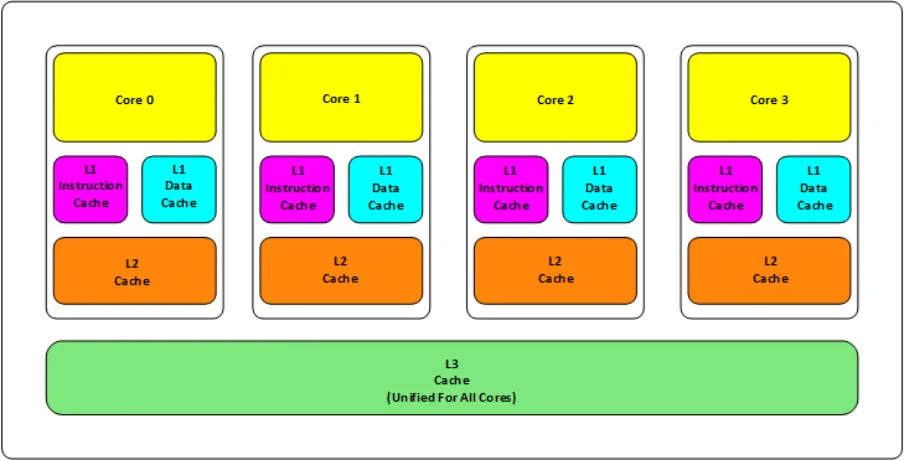
现代 CPU 普遍采用多核架构与多级缓存设计,早期处理器多为两级缓存(L1、L2),新款处理器则普遍升级为三级缓存(L1、L2、L3),整体存储体系遵循离核心越近、速度越快、容量越小的设计原则。如下图所示:
缓存结构与分工
- L1 缓存:分为指令缓存与数据缓存,是最靠近运算核心的高速缓存,每个 CPU 核心独立拥有。
- L2 缓存:不区分指令与数据,同样为每个核心独占,容量与速度介于 L1 和 L3 之间。
- L3 缓存:不区分指令与数据,由所有 CPU 核心共享,容量最大、速度相对最慢。
访问速度对比(以 CPU 时钟周期为单位)
- L1 缓存:约 4 个时钟周期
- L2 缓存:约 11 个时钟周期
- L3 缓存:约 39 个时钟周期
- 内存(RAM):约 107 个时钟周期
可见 L1 缓存的访问速度约是内存的 27 倍,但容量差异悬殊:L1、L2 多为KB 级,L3 则达到MB
级。缓存之后依次为系统内存、硬盘等存储设备,速度逐级下降、容量逐级增大。
为什么要设计三级缓存?以及由此带来的核心问题
CPU 采用三级缓存架构,本质是在速度、容量、物理实现、多核协同之间做综合权衡,并非单纯追求更快或更大。
一、为什么要分成 L1 / L2 / L3 三层?
1. 物理限制:速度与容量天生矛盾
想要更大容量,就需要更多晶体管,不仅会增大芯片面积,更关键的是信号传输路径变长、延迟上升。访问速度和电路距离强相关,离计算核心越远,速度越慢。大容量高速缓存从物理上就无法实现。
2. 多核场景下的协同与同步成本
多核架构中,多个核心会同时访问、修改数据,缓存越大、共享越复杂,数据同步开销就越高。
同时,缓存与内存速度差距极大,如果只用一级缓存,要么容量太小频繁失效,要么太大速度跟不上。多级缓存可以用小容量极速缓存
+ 中容量高速缓存 + 大容量共享缓存的组合,最大化整体吞吐。
这个世界永远是平衡的,一面变得有多光鲜,另一面也会变得有多黑暗。
3. 工程上的折中艺术
技术世界永远是权衡:速度上去了,容量就要妥协;容量做大了,速度必然下降。多级缓存就是在这对矛盾里找到最优平衡点。
二、多级缓存带来的两大关键问题
更多层级、更多副本,必然引入新的复杂度,最核心的是两个问题:
1. 缓存命中率
数据是否刚好在缓存里,直接决定访问速度。命中率越低,CPU 越要去慢速内存取数,性能急剧下降。
2. 缓存一致性(多核下尤为复杂)
多个核心各自有独立 L1/L2,同一份数据可能在多处缓存中存在副本。一旦某个核心修改数据,其他副本必须同步更新或失效,否则会出现数据不一致。
多核缓存一致性,本质和分布式系统多节点数据同步非常相似。
三、先理解一个基础概念:Cache Line
CPU 不会以单个字节为单位从内存加载数据,效率太低。它会整块批量读取,这个最小读取单位就叫 Cache
Line。
- 主流 CPU 通常为 64 字节
- 部分架构使用 32 字节或 128 字节
- 64 字节相当于 16 个 32 位整数
举例:如果 L1 缓存大小为 32KB:32KB = 32768 字节
32768 / 64 = 512 个 Cache Line
也就是说,这片 L1 缓存被划分为 512 个槽位,数据只能以整行的形式载入。
四、内存地址与缓存的映射策略(CPU Associativity)
缓存远小于内存,同一块内存数据不可能同时存在所有位置,因此需要一套映射规则,决定内存数据应该放到缓存的哪个位置。
1. 全相联映射(Full Associativity)
- 内存数据块可以放到任意一个 Cache Line中。
- 优点:灵活,冲突少,空间利用率高。
- 缺点:查找时要遍历所有 Cache Line,复杂度 O (n),硬件实现成本高、速度慢。
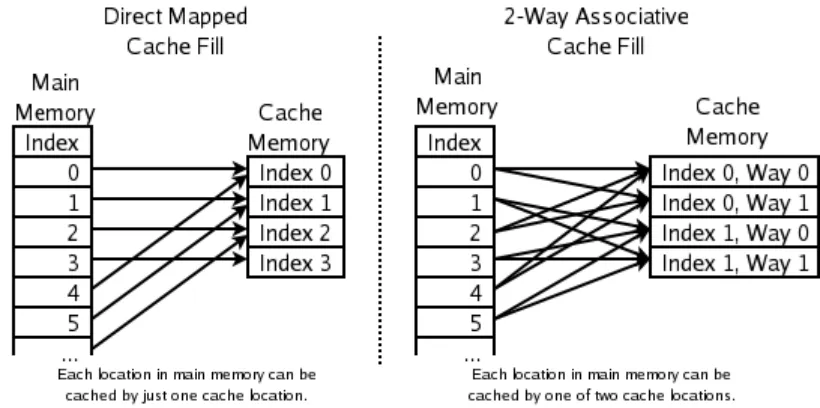
2. 直接映射(Direct Mapped)
类似最简单的哈希表,用取模方式定位:
缓存索引 = 内存地址 mod 缓存行数
举例:L1 有 512 个 Cache Line,则
地址 mod 512 就能直接算出对应 Cache Line 位置。
- 优点:查找极快,硬件简单。
- 缺点:冲突严重。如果多个频繁访问的地址刚好映射到同一条 Cache Line,就会频繁失效、性能暴跌。
3. N 路组相联映射(N-Way Set Associativity)
为兼顾前两种方案的优缺点,现代 CPU 普遍采用此方案:
(1) 先把缓存分成若干组(Set),每组包含 N 个 Cache Line,称为 “N 路”。
(2) 通过地址哈希先定位到对应的组。
(3) 再在这一组内的 N 个 Cache Line 中查找。
这样既降低了搜索开销,又大幅减少冲突,是速度、成本、命中率之间最成熟的折中方案。
扯远了,咱们把话题再拉回来。
核心问题:多核系统中,Cache是共享的, 干扰不可避免。
即使任务固定在核心上,其他核心仍然可能污染LLC,cache miss导致延迟不可预测
工程常见解法:缓存着色(Cache Coloring)与硬件分区想象一下,如果把Cache比作一个有很多行(Set)的书架。默认情况下,所有程序的书都可以随意放在任何一行。缓存着色技术,就是通过软件手段,控制物理内存页映射到Cache的哪一行。这样,我们可以把关键任务的书,只放在书架的前几行,而其他任务的书只能放在后几行,物理上隔离。
一段对话:
A: “这听起来很底层,实现起来难吗?”
B: “确实需要内核或BSP(板级支持包)层面的支持。但带来的收益是巨大的——关键任务的延迟抖动可以减少30%到70%。像一些高性能实时系统,已经在用类似技术。新一代ARM芯片的MPAM(内存系统资源分区与监控)功能,更是直接在硬件层面支持这种分区,让隔离更干净、配置更简单。”
2.3 内存与NoC层:带宽与访问控制(隐形瓶颈)
典型场景:你监控到CPU负载很低,但控制任务就是偶尔“卡顿”。查了半天,发现是AI加速器正在通过DMA(直接内存访问)大量搬运数据,把内存带宽吃满了。你的控制任务虽然CPU有空,但等不到内存数据,只能干等。
这就是内存带宽和片内网络(NoC,Network-on-Chip)争用带来的问题。
工程解法:带宽控制与QoS
我们需要给关键任务开辟一条“高速公路专用道”。
1) 内存带宽控制:利用 resctrl(Linux内核的资源控制接口)、cgroup 等机制,限制非关键任务(如AI推理、日志记录)可以使用的最大内存带宽。
2) QoS机制:现代SoC(如ARM系列)内部有总线仲裁器。通过配置ARM QoS扩展,我们可以给关键事务(如控制CPU的访存请求)更高的优先级,确保它永远能插队先行。
关键价值
2.4 中断层:IRQ调度(最容易翻车的点)
IRQ 的全称是 Interrupt Request,即中断请求。
在自动驾驶 ECU 的确定性调度体系中,中断层是造成系统抖动的关键来源之一。IRQ 是硬件向 CPU
发出的信号,用于通知某个事件(如传感器数据到达、定时器超时)需要立即处理。如果不加控制,频繁或高优先级的中断会随时打断关键实时任务的执行,导致延迟不可预测。
你是否遇到过:CAN总线突然涌入大量报文,触发的中断直接把正在执行的控制任务给打断了?如:摄像头中断打断控制任务,CAN中断导致刹车延迟。这就是中断带来的不确定性。
工程解法:中断隔离与线程化
- 中断绑定(IRQ Affinity):把高频率、非关键的中断(比如某个不太重要的传感器)统统赶到专门的“中断处理核心”上去,不让它们打扰关键任务。
- 中断线程化(Threaded IRQ):将中断处理程序的下半部(耗时的处理逻辑)变成一个内核线程。这样,这个线程就可以被调度器管理,你可以给它设置优先级,甚至像普通任务一样进行绑核。核心思想是:把不可控的“硬件打断”,转化为可控的“软件调度”。
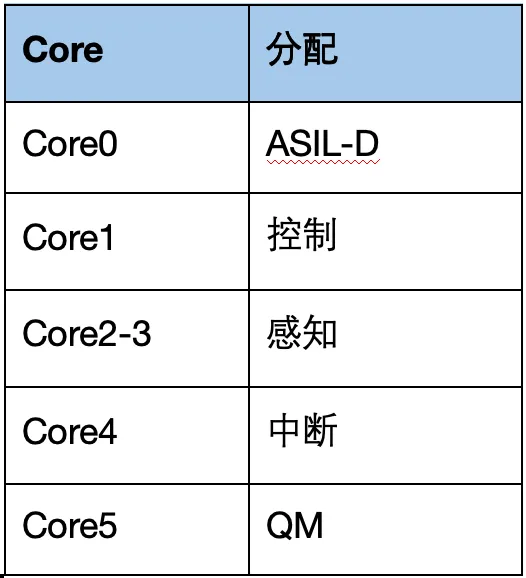
一个典型的分区策略:
按核心功能分区 + 中断集中管理的思路,把不同任务和中断精准分配到不同 CPU 核心,互不干扰:
1) Core 0-1 作为安全岛
只负责最高安全等级的制动、转向等 ASIL-D 控制任务,关闭一切非必要中断,保证安全功能绝对稳定可靠。
2) Core 2-3 负责感知计算
专门处理摄像头、激光雷达数据和 AI 推理,同时承接这些传感器相关的中断,让感知和计算在同一组核心内闭环运行。
3) Core 4 作为专职管家
统一接管 CAN、以太网等所有外设中断,避免各类外设中断去打扰安全核心和感知核心,保证关键业务不被频繁打断。
4) Core 5...及以后核心负责娱乐系统
运行类 Linux等非实时系统,处理车机、人机交互等对实时性要求不高的应用。
2.5 系统层:混合关键级 + 虚拟化隔离(决定上限)
这是从“调度优化”到“系统架构”的跃迁。
当我们把CPU、Cache、内存、中断都做到极致后,如果还想更进一步,或者要满足严格的功能安全要求(如ISO
26262的免于干扰,FFI,Freedom From Interference),就需要从“逻辑隔离”走向“物理隔离”。
为什么需要?
因为:Linux本质上不是确定性系统
工程解法:混合关键级系统 + 虚拟化
这是从“优化”到“架构”的质变。
- 方案A:Hypervisor强隔离(如Jailhouse、Xen、QNX Hypervisor)
在硬件之上运行一个轻量级的虚拟机监视器。它将物理核心、内存区域、外设静态分区,分配给不同的虚拟机。一个虚拟机里跑的Linux即使崩溃了,也影响不到旁边虚拟机里跑的实时操作系统(RTOS)。Jailhouse这种静态分区Hypervisor,更是把“隔离”做到了极致,非常适合安全场景。
- 方案B:Mixed-Criticality架构
在一个芯片上,同时运行多个系统:
- ASIL-D (最高安全等级):运行在独立的RTOS分区上,执行制动、转向。
- ASIL-B (中等安全等级):运行在Linux RT(实时Linux)分区,执行部分规划控制。
- QM (无安全等级):运行在普通Linux分区,执行信息娱乐、OTA升级。
这样,不同安全等级的任务,从一开始就生活在不同的“物理世界”里,从根本上消除了干扰的可能。
本质提升
- 从“尽量不干扰” → “物理隔离”
- 满足ISO 26262 FFI要求
03 关键进阶技术
3.1 时间触发调度(Time-Triggered)
区别于传统事件触发/优先级调度的“资源竞争模式”,时间触发调度采用全局时序预规划机制,任务执行时刻、时长、通信周期均提前固化,无需抢占资源即可保障时序确定性,彻底规避优先级反转、调度抖动等问题。
不同于优先级调度:任务执行时间是“提前规划”的,而不是“竞争得来的”
核心技术落地:
- TTA(时间触发架构):构建全局统一时钟,实现任务、中断、通信的全链路时序同步
- TDMA时分多址调度:按固定时隙分配资源,杜绝多任务并发争抢带宽
- TSN(802.1Qbv):车载时间敏感网络,将时间触发机制延伸至车内通信,实现ECU间端到端确定性传输
3.2 WCET最坏执行时间分析
自动驾驶必须回答一个问题:最坏情况下,这个任务多久能完成?
工程化分析方法:
- 静态时序分析:依托aiT等专业工具,无需实车运行即可完成代码级时序建模
- 全路径覆盖分析:遍历任务所有执行分支,锁定最长执行路径
- 缓存行为精准建模:结合Cache隔离策略,消除缓存抖动对执行时间的干扰
典型应用场景:制动控制、转向控制等硬实时任务,严格限定<1ms响应阈值,无任何超时容错空间。
3.3 基于eBPF的可观测性诊断:从经验调优到数据驱动排障
传统调度问题排查依赖“经验猜测”,偶发抖动、延迟超标难以复现定位;而eBPF无侵入式实时诊断,可直接抓取内核级调度数据,实现问题根因的精准定位,大幅提升调试效率。
核心诊断能力:
- 实时追踪任务调度延迟、上下文切换耗时,定位抢占瓶颈
- 精准分析IRQ中断干扰,识别打断关键任务的外设中断源
- 完整捕获任务抢占链,还原延迟发生的全流程
工程价值:实现调度优化从“盲调”到“数据驱动”,快速定位偶发问题,缩短调试周期。
3.4 NUMA与拓扑感知调度
高阶自动驾驶采用多核异构NUMA架构SoC,不同CPU Cluster、内存节点存在物理访问延迟差异,若忽略硬件拓扑盲目调度,会大幅增加访存延迟、引发性能抖动。
核心优化策略:
- CPU-内存就近绑定:将任务绑定至同NUMA节点的CPU与内存,降低跨节点访存延迟
- 拓扑感知智能调度:感知SoC Cluster、Cache层级、总线拓扑,动态分配最优执行资源
适配高端车规SoC的多核架构,最大化硬件性能,同时保障实时性。
3.5 AI智能调度:下一代确定性调度的演进方向
传统调度依赖固定规则,难以适配自动驾驶复杂多变的场景负载;AI调度实现从规则驱动到数据驱动的跃迁,兼顾确定性与资源利用率,适配高阶自动驾驶的动态需求。
核心能力布局:
- 场景化负载预测:基于路况、感知负载预判算力需求,提前分配资源
- 动态任务迁移:在不破坏确定性的前提下,平衡多核负载,提升硬件利用率
- 自适应优先级调控:根据场景风险等级,动态调整任务优先级,兼顾安全与效率
04 工程落地:
从理论到实践的“四步法”
理论讲完,我们来点实在的。如何在自己的项目里一步步落地这套体系?
Step 1:任务分级与关键性分析
别急着动手写代码,先坐下来,把车上所有任务列个清单,贴上标签:
- 硬实时 (几毫秒级):制动控制、转向控制、气囊触发。失败意味着伤亡。
- 软实时 (几十毫秒级):感知融合、轨迹规划、V2V通信。失败意味着功能降级或体验差。
- 非实时 (秒级以上):UI、日志存储、远程诊断、仪表盘显示。失败可以容忍。
Step 2:核心分区与资源规划
根据任务分级,规划你的多核SoC。
- 保留核心:为硬实时任务预留专用核心。可以考虑使用 isolcpus 或 cpuset 将这些核心从Linux通用调度器中隔离出来。
- 分区规划:参考上面“中断层”的分区策略,为不同类型任务规划核心归属。
Step 3:逐层资源隔离与配置
按照我们讲的五层模型,一层一层往上“加固”:
1. CPU:用 sched_setaffinity 绑核。
2. Cache:调研你的SoC是否支持MPAM或能否实现缓存着色。与BSP或芯片原厂沟通,寻求支持。
3. 内存:使用 cgroup 的 memory 控制器限制非关键任务的内存使用量;使用 resctrl
限制其内存带宽(如果硬件支持)。
4. 中断:将关键核心的中断亲和性设置为0(不处理中断),将非核心中断绑定到指定核心,并为关键的中断处理线程设置高实时优先级。
5. 系统:评估是否需要引入Hypervisor。如果安全要求极高,或者需要在单芯片上混合多个操作系统,这是必选项。
Step 4:验证与观测——用数据说话
所有配置完成后,必须验证效果。不能靠“感觉良好”,要靠数据。
- latency tracing:使用 ftrace、perf 或更强大的 eBPF 工具,实时追踪关键任务的调度延迟、抢占次数、运行时间分布。eBPF可以让你像“上帝视角”一样,看到任务为何被延迟,是被谁抢占了,还是等内存等了多久。
- 压力测试:在系统满负载(CPU、内存、IO全速运行)的情况下,反复测试关键任务的响应时间,观察其最坏情况执行时间(WCET)验证是否仍在容忍范围内。
- 故障注入:故意让非关键任务崩溃、让内存带宽爆满,看是否真的如设计一样,不影响关键任务。
05 典型问题复盘
(那些年我们踩过的坑)
问题1:我已经绑核了,为什么关键任务还是抖得厉害?
可能原因:Cache污染 / 内存争用
诊断:查Cache!大概率是共享缓存被其他核心的任务污染了。用性能计数器(perf stat -e
cache-misses)看看你的关键任务绑核后的缓存缺失率是不是异常高。如果是,就需要引入缓存隔离技术。
问题2:CPU利用率不到一半,系统却偶发卡顿?
可能原因:Memory bottleneck
诊断:查内存带宽!用 perf 或者芯片提供的性能监测单元(PMU)工具,看看内存控制器带宽是否被某些非关键任务(如大量数据拷贝的AI任务)长时间占满。解决方案就是上内存带宽限制。
问题3:为什么系统跑着跑着,偶尔会出现一次巨大的延迟尖峰?
可能原因:IRQ打断
诊断:查中断!很可能是一次突发的网络风暴或CAN总线事件,触发了大量中断,打断了一切。检查 /proc/interrupts,看看哪个中断在关键核心上计数暴增。解决方案是把中断都赶走。
问题4:我感觉系统不稳定,但就是复现不了,也定位不到?
可能原因:缺乏隔离 (需要Hypervisor)
诊断:这是最棘手的情况。问题可能源于多方面的偶发耦合。如果预算和时间允许,可能需要考虑架构升级。从“尽力而为”的Linux调度,迁移到像
Jailhouse 这样的静态分区Hypervisor,通过硬件级别的强制隔离,从根本上斩断所有不确定性的来源。
06 未来已来:从调度优化到
“确定性操作系统”
展望未来,自动驾驶正在发生一个根本性转变:对确定性的追求不会止步。
1. 从CPU调度 → 全栈确定性控制
控制范围必然会从CPU,扩展到Cache、内存、NoC、中断,乃至车内的网络(如时间敏感网络TSN)。未来的架构师,需要具备全栈资源视角。
2. 从静态策略 → 动态智能调度
静态的绑核分区是基础,但可能不是最高效的。未来,我们可能会看到 AI辅助的调度器。它能实时预测任务负载和资源争抢情况,动态调整任务优先级、甚至进行预测性的任务迁移和资源再分配,实现“自动驾驶”的调度系统。
3. 从单ECU → 整车时间系统
自动驾驶不是一个ECU的战斗。基于 TSN 的整车级时间同步将成为标配。所有ECU都同步到一个全局时间,任务按事先规划好的“时间触发”时刻表精确执行,整个车辆变成一个像交响乐团一样高度协同的确定性系统。
07 总 结
自动驾驶系统的终极竞争,表面上看是算力的竞争,深一层看是算法的竞争,但归根结底,是“确定性能力”的竞争——即在任何情况下,都能在确切的时间内,给出确切的结果。
自动驾驶 ECU 确定性架构金字塔 + 干扰路径图
核绑定和优先级调度,是我们对抗不确定性的第一件武器,也是最重要的一件,但它绝不是唯一的一件。真正决定系统上限的是:
- Cache是否可控
- 内存是否可控
- 中断是否可控
- 时间是否可预测
当你下次再面对那个“偶发的2毫秒延迟”时,希望你能想起这座五层金字塔,从一个更全面、更系统的高度去审视问题。
从“调度优化”到“系统级隔离”,再到“软件定义实时系统”,这条路没有尽头。但每向前一步,我们离那个真正安全、可靠、可控的自动驾驶未来,就更近了一步。 | 






 订阅
订阅