| 编辑推荐: |
本文主要介绍传感器和执行器部分的系统设计,希望对你的学习有帮助。
本文来自于汽车电子与软件,由火龙果软件Alice编辑,推荐。 |
|
第一章: 传感器
智能座舱的传感器分为下面几个类别:视觉传感器、音频传感器、触摸传感器、雷达传感器、惯性传感器、位置传感器、温度传感器等等。
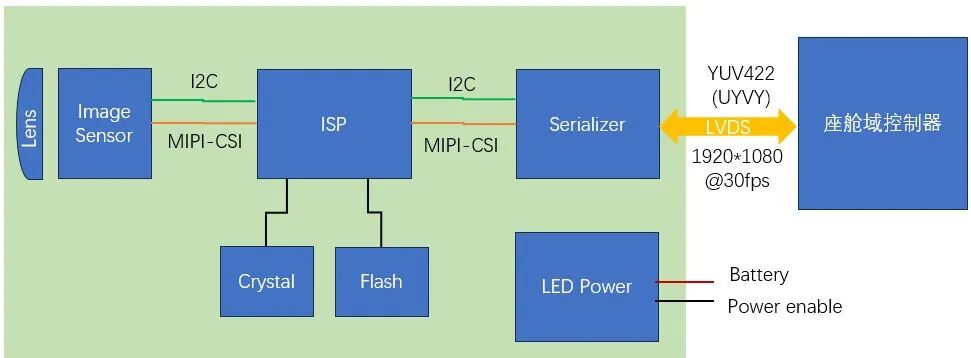
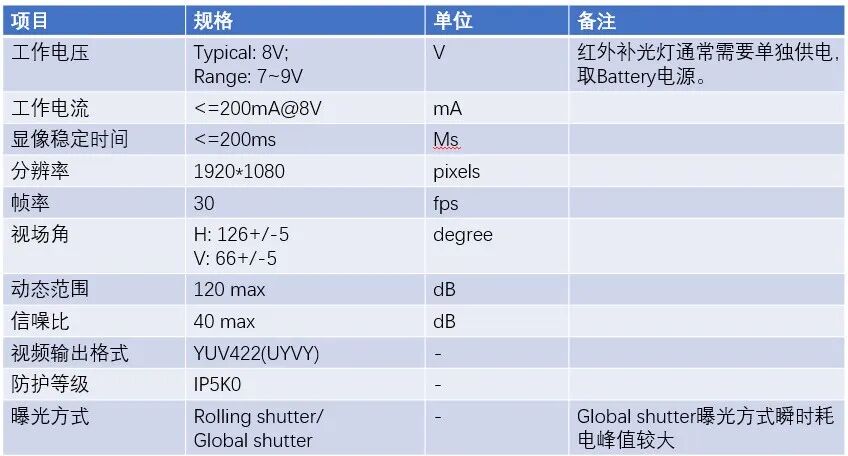
1. 视觉传感器
- 初始化阶段诊断:针对摄像头自诊断功能无法启用的场景,其启动工作状态的判定需由解串器通过检测Lock信号实现,以此确认摄像头是否正常启动。
- 初始化完成后诊断:摄像头完成初始化后,需开展多维度诊断工作,具体包括:摄像头LVDS信号数据链路诊断、摄像头供电电源诊断、以及与摄像头之间的I2C通信链路诊断。
- 实际应用中,物理中断、EMC干扰等因素可能导致信号中断,因此需在控制器端支持摄像头重启功能,即实现热插拔机制。
- 串行器通过寄存器配置方式建立信道,控制器端需对信道建立状态进行判定;若信道建立过程中出现异常导致建立失败,控制器端应能触发重新配置流程;经多次配置仍无信号时,判定为故障,需对摄像头重新上电并执行初始化配置。
- 摄像头上电后,需等待其内部芯片完成初始化(该过程约需800ms),方可接收I2C配置指令。
- 为避免摄像头内部时序紊乱,断电时间需充分保障,确保其电压降至1V以下并维持300ms后,再执行上电操作。
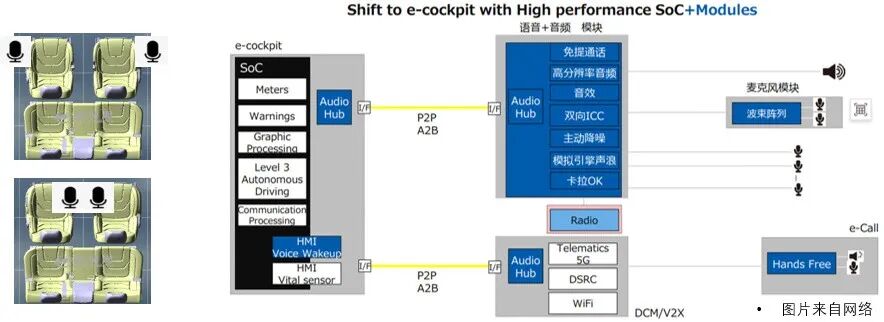
2. 音 频 传感 器
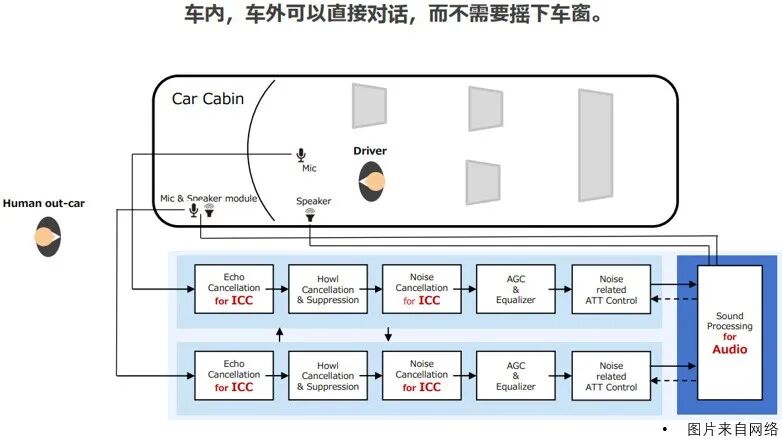
- 麦克风在车内布局有两种:一种是分布式麦克风,针对每个座位布置一个麦克风;另一种是矩阵式麦克风,布置在并排两个座位的中间,麦克风的中心间距大于10cm,采用beam forming波束成形技术。
备注:
备注:
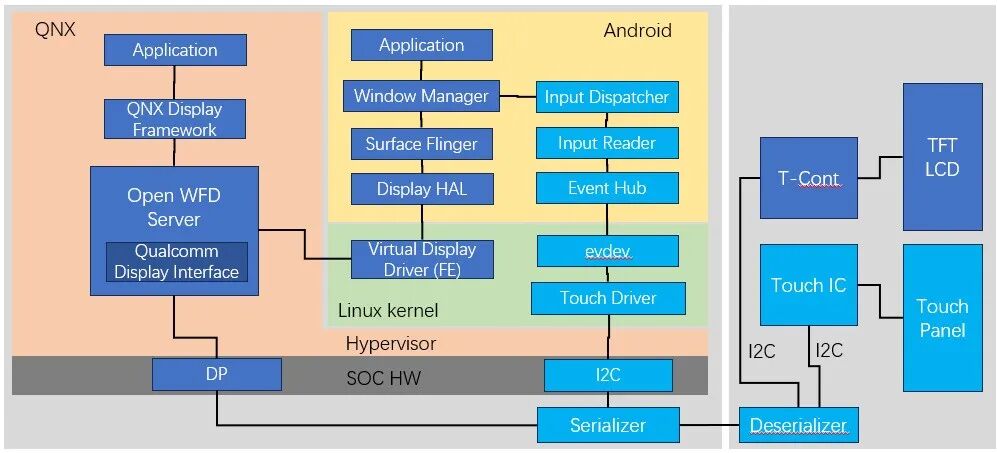
3. 触摸传感器
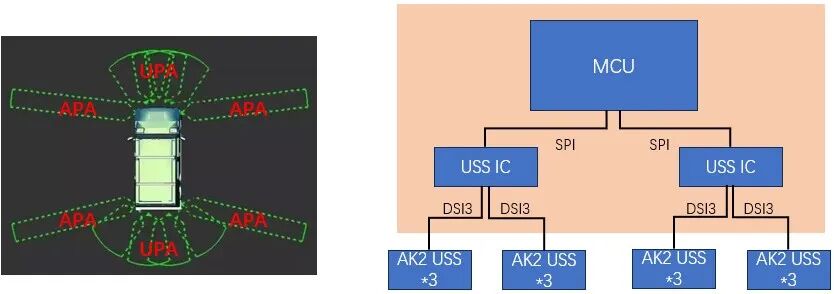
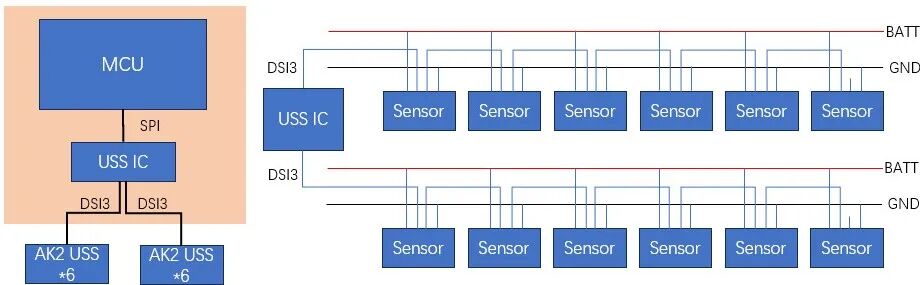
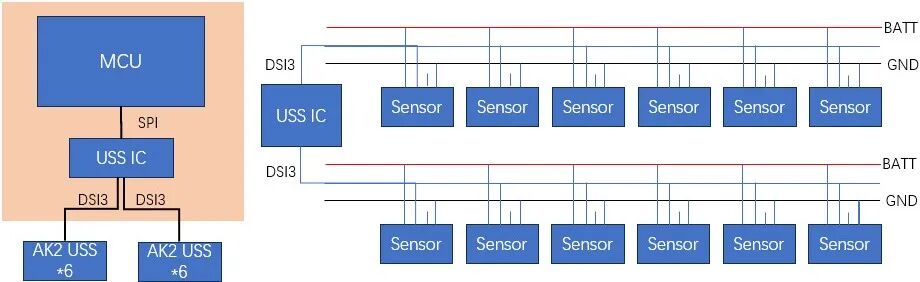
4. 雷达传感器
- 车载超声波雷达USS主要分为超声波驻车辅助传感器UPA(Ultrasonic Parking Assistant)和自动泊车辅助传感器APA(Automatic Parking Assistant)两大类。UPA是一种短程超声波雷达,探测距离2.5m,探测距离较近,检测更准确,多用于汽车前后障碍物检测。APA是一种远程超声波雷达, APA探测距离5m,常安装在车身侧面,探测汽车侧方障碍物,检测范围可覆盖一个停车位,方向性较强。目前AK1下一代 AK2 超声波雷达探测距离已经可以达到 7m,最小盲区仅 10cm。
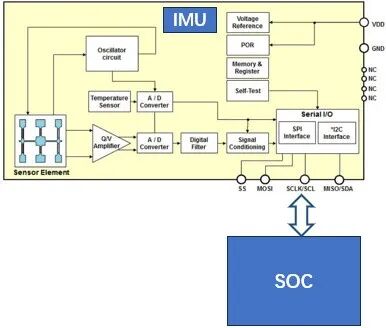
5. 惯性传感器
- 惯性传感器(Inertial Sensor)也称IMU(Inertial Measurement Unit)是一种可以测量汽车运动状态的传感器。它可以测量车辆的加速度、角度和角速度等运动参数,是汽车辅助驾驶中不可或缺的一部分。IMU传感器代表惯性测量单元,沿着三个正交轴(X/Y/Z),测量旋转角速率和线性加速度。
6. 位置传感器
- 车辆收到的GNSS信号误差是米级别的。经过大气传播的衰减会增大定位误差,同时多路径干扰,尤其是高楼林立的城市和峡谷中多路径干扰也会增大定位误差,另外还存在信号欺骗,指伪造的GNSS信号干扰接收机,也就是显示与实际情况不符的位置和时间信息,以此欺骗用户。
- 为了降低定位误差,GNSS传感器设计会采用多星座设计,即结合GPS(美国),GLONASS(俄罗斯),Galileo(欧盟),BeiDou(中国),QZSS(日本),NavIC(印度)等多个星座接收的方式。
- 每个星座也会采用多频段结合的策略,比如L1, L2和L5等多频段同时接收的设计。
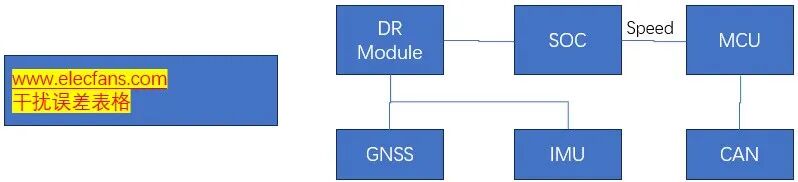
- 在实际系统设计中,会有GNSS信号与IMU信号和动力域信息(车速、方向盘转角等信息)融合后经过一定算法,得到更加准确的惯性导航的车辆定位信息输出给SOC上层应用。
7. 温度传感器
- 智能座舱的温度传感器,主要应用于监控系统的环境温度,器件工作温度。根据不同的温度范围进行不同的系统运行策略调整,以及不同的电源迁移管理。
- 工作温度范围内:检测温度高于某个温度阈值(如40度),采取系统降温措施,开启风扇或者开启水冷控制;检测温度继续上升超过第二个温度阈值(如70度),降温措施增强,提高风扇转速或水冷流量;检测温度再上升超过第三个温度阈值(如80度),SOC的结温仍处在高位,则采取系统运行功能性能的降级处理(比如按照优先级顺序降低运行性能或杀掉第三方应用、后台运行的非安全应用、前台娱乐应用、前台非安全应用、降低SOC工作频率)。
- 温度传感器布置:显示屏模组,背光等附近布置温度传感器,用于检测背光灯温度,并在温度过高时反馈给系统用于降低背光的控制;座舱域控制器,SOC及DDR等芯片内部通常会自带温度传感器,用于在高温下彩玉运行降级措施;PCB板端远离发热器件的位置布置温度传感器,用于间接测量外部环境温度,以便在系统超过正常允许工作温度范围后,进行电源状态迁移的控制。(也可通过整车其它ECU获取外部环境温度信息)
- 另外,某些模块在不同温度下的工作状态会出现偏差,也需要采集温度,进行适当的温度补偿来优化器件的工作性能。
第二章: 执行器
智能座舱的执行器分为下面几个类别:视觉执行器、音频执行器、车控执行器、充电执行器等等。
1. 视觉执行器
- 座舱显示屏按功能分:仪表屏,中控屏,副驾屏,抬头显示屏,后座娱乐屏,吸顶屏,空调控制屏,流媒体后视镜,透明A柱屏,智能表面显示屏等等。
- 座舱显示屏按显示方式分:TFT LCD显示屏,OLED屏,QLED屏,W-HUD屏,AR-HUD屏,车外投影显示屏,等等。
- 传统低端一体机的显示部分与主机在一个物理结构中,采用RGB并行的视频信号传输方式,或者采用LVDS信号传输给LCD。现在随着主机功能增多,体积增大,整合了仪表功能,显示屏都采用与主机部分分离式设计,通过串行解串芯片以及屏蔽线束连接。
- 串行解串芯片目前主流供应商有TI和Maxim(ADI),当然还有小众的Inova的 APIX ,Rohm的Clockless等传输方案及产品。
- 针对不同的显示方案可以选用不同的串行解串芯片方案,比如支持MST的方案可以支持多个屏的显示,splitter方案可以在SOC中将两个显示画面拼成super frame输出,再由串行芯片split成两个独立的显示画面,分别发送给两个显示屏的解串芯片。显示屏显示内容及分辨率也有相同和不同的几种组合,对应不同的串行解串芯片方案。
- 在选择串行解串芯片时,除了考虑显示屏的常规参数,如分辨率,帧率,位深等,还要考虑消隐区域(行场的前廊后廊)也要占用一定带宽;同时传输协议本身的data payload占比也要计算在内。
- 传输方式可以采用差分对传输,或同轴传输。差分对传输介质连接器可以采用HSD连接器(带宽可以到3~5Gbps),H-MTD连接器(带宽可以到13.5Gbps);同轴传输介质连接器可以采用FAKRA连接器(带宽可以到8Gbps),HFM连接器(带宽可以到10Gbps)。以上数据皆为理论数据,实际应用中依赖于具体连接器供应商规格,线束材质、长度、屏蔽性能,以及线束与连接器之间的匹配情况。
- 显示屏端通产设计为一个可以自我管理的独立设备,具备MCU芯片来控制整个显示屏的工作状态,以及外部传输控制;出于成本考虑,提高产品成本竞争力,也会考虑去掉MCU,由功能强一点的T-CONT芯片来集成部分屏端信号或控制,由主机端统一进行控制管理。
- 显示屏的电源使能信号通常由一根单独的线束来控制,两对差分信号传输的方案可能会选用4+2的HSD连接器。为了降本,由差分传输变为同轴传输,将连接器HSD变更为FAKRA,可以同时节省连接器和线束的成本。此时,电源使能信号可以通过同轴线传输,在屏端设计特殊电路,这样可以节省一根独立的硬线,不仅节省硬件成本,整车布线也降低复杂度。
2. 音频执行器
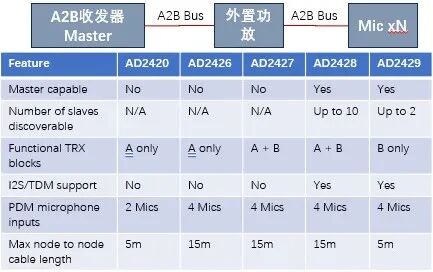
- 低配车型通常采用内置四通道功放,模拟或数字接口;外置功放通常采用A2B接口,A2B收发器选型通常采用I2C控制接口,具体型号可根据节点数量和线束长度来确定,在整车布线长度未知的情况下通常会选用 AD2428 。
- 内置数字功放选型需要考虑功率,时钟频率,以及支持的TDM格式是否能与DSP相匹配。
- A2B总线 外挂节点类型包括外置功放,数字Mic,RNC降噪传感器,副功放(不带算法),甚至后排车机。
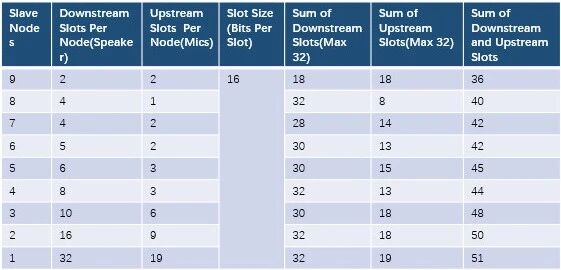
- A2B总线节点布置顺序需要考虑整车布线长度,节点供电能力,上行和下行的音源slot数量,不同的连接顺序,上行和下行的音源配置方案将不同,会影响audio系统设计。
3. 车控执行器
- 智能座椅具有智能调整座椅角度,用户按摩,座椅加热的智能功能,通过马达,加热装置等完成这些功能。这些装置通过CAN/LIN等总线直接或间接连接到座舱域控制器,由用户进行操作。
- 智能空调具有智能调整座舱内温度湿度,以及释放香氛,调节座舱内气味,使座舱内空气更清新。而智能空调是通过CAN或Ethernet总线与座舱域控制器进行连接通信。
- 智能车窗具有智能调整车窗的开闭,调整开度,以及防止夹手等功能。其由座舱域控制器通过CAN或Ethernet总线发送命令给车身ECU,再由车身ECU通过CAN/LIN总线来控制车窗的马达执行器来完成这些功能。
4. 充电执行器
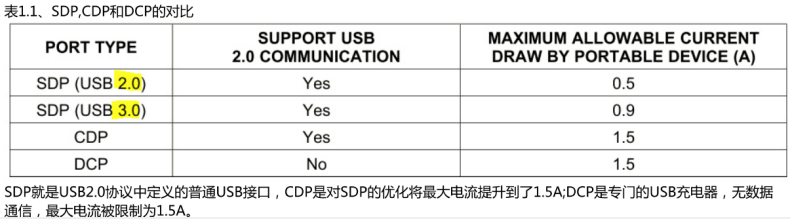
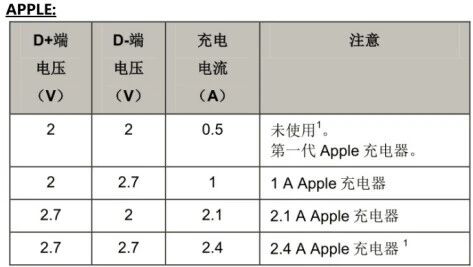
- USB充电类型:BC1.2充电协议,Apple充电,PD充电,Type-C充电。连接方式:座舱域控制器单独提供最大2.5A电流的充电能力;或者外部单独配置一个USB充电盒子,通过USB2.0或USB3.0接口与座舱域控制器相连进行通信。
- WPC充电模块通过LIN总线与车控ECU或座舱域控制器连接。
| 






 订阅
订阅