| 编辑推荐: |
本文主要介绍三层软件架构体系,重点对功能软件层与应用软件层的组成、作用以及产业分工进行系统分析,并结合短期与长期视角,探讨汽车软件价值重心的演进方向,希望对你的学习有帮助。
本文来自于汽车电子与软件,由火龙果软件Alice编辑,推荐。 |
|
随着汽车产业加速向电动化、智能化与网联化演进,软件在整车价值体系中的地位不断提升,汽车正从以机械硬件为核心的产品,逐步演变为以软件和算法驱动的智能终端。在这一背景下, “软件定义汽车”已成为行业共识,整车电子电气架构与软件架构正在发生根本性重构。
为了支撑自动驾驶、智能座舱、车联网以及持续 OTA 升级等复杂功能的实现,智能汽车软件需要具备高度的模块化、可扩展性和安全性。因此,业界普遍采用分层的软件架构设计,通过清晰的层级划分与标准化接口,实现软硬件解耦和跨平台复用。当前主流的智能汽车软件体系通常可划分为系统软件层、功能软件层和应用软件层三大层级,各层分工明确、相互协同,共同构成智能汽车的软件基础。
下文将围绕这一三层软件架构体系,重点对功能软件层与应用软件层的组成、作用以及产业分工进行系统分析,并结合短期与长期视角,探讨汽车软件价值重心的演进方向。
目 录:
1. 智能汽车软件总体三层架构
2. 系统软件层——狭义汽车操作系统
3. 功能软件层(Functional Software Layer)
4. 应用软件层(Application Software Layer)
一、 智能汽车软件总体三层架构
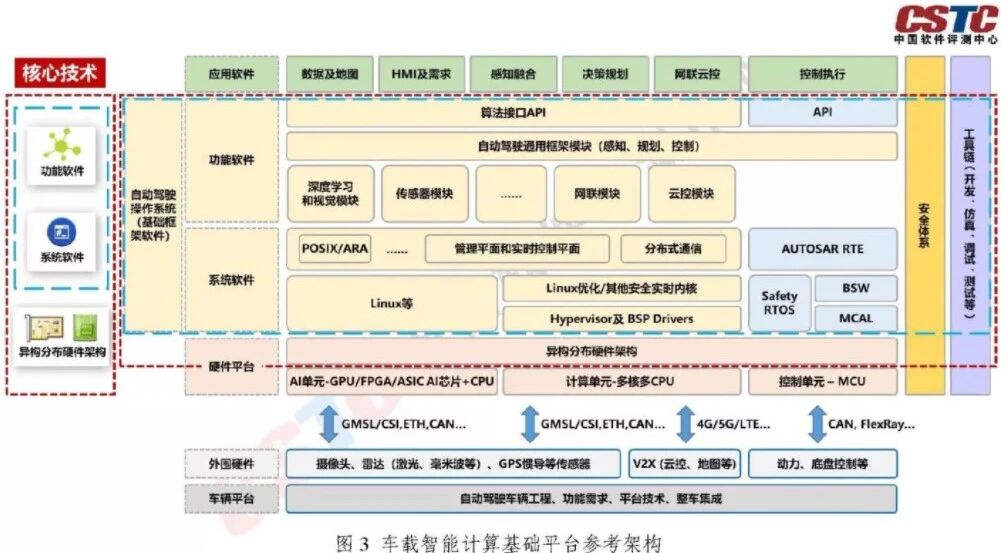
从整体架构上看,智能汽车软件通常采用 自下而上的三层分层架构设计 ,通过清晰的分层与标准化接口,实现软硬件解耦、功能模块复用以及系统的高可靠性与可扩展性。具体包括以下三层:
1.1 底层系统软件层( System Software Layer)
底层系统软件层是智能汽车软件体系的基础,直接与车载硬件平台交互,负责对硬件资源进行统一管理和抽象。该层主要包括 BSP(板级支持包)、虚拟化层( Hypervisor )、系统内核(OS Kernel)、中间件组件等 。
其核心作用在于:
- 屏蔽底层硬件差异,为上层软件提供统一、稳定的运行环境;
1.2 功能软件层( Functional Software Layer)
功能软件层位于操作系统、网络协议栈和数据库之上,是连接底层系统软件与上层应用算法软件的重要 “承上启下”层。该层通常包括 通用库组件、功能中间件、系统服务模块等 。
该层的主要职责是:
- 对底层系统能力进行封装与组合,降低应用开发复杂度;
通过功能软件层,开发者无需直接面对复杂的操作系统和硬件细节,从而显著提升开发效率和软件质量。
1.3 应用与算法软件层( Application & Algorithm Layer)
应用与算法软件层是直接面向用户和整车功能实现的最上层,主要包括:
该层负责将智能汽车的软件能力转化为具体可感知、可使用的功能,直接决定了车辆的智能化水平和用户体验,例如自动泊车、语音交互、智能导航、远程控制等。
二、 系统软件层——狭义汽车操作系统
系统软件层中的核心是 汽车操作系统( Automotive Operating System) 。它是管理和控制智能汽车硬件与软件资源的底层基础平台,为上层软件提供统一的运行环境、通信机制和安全保障。
2.1 汽车操作系统 分类
根据对底层操作系统的改造深度以及能力范围的不同,汽车操作系统通常可分为以下几种类型:
2.1.1 基础型操作系统
基础型操作系统是指提供完整、通用操作系统能力的产品,例如 QNX 、Linux、Windows CE(WinCE)等 。这类操作系统通常包含:
基础型操作系统具备较强的通用性和稳定性,广泛应用于车载信息娱乐系统、域控制器和自动驾驶计算平台等。
2.1.2 定制型操作系统
定制型操作系统是指在基础型操作系统之上进行 深度定制化开发 ,包括但不限于:
这类操作系统通常用于构建 整车级座舱系统平台或自动驾驶系统平台 ,以满足车企在性能、安全、实时性及差异化体验方面的需求。
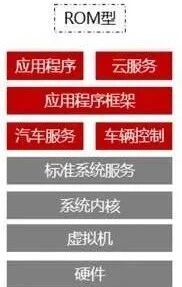
2.1.3 ROM 型汽车操作系统
ROM 型汽车操作系统通常基于 Linux 或 Android 等基础型操作系统 进行有限定制,不涉及内核层面的修改,主要集中在:
由于开发成本低、周期短、生态成熟,目前 大多数车企更倾向于采用或自研 ROM 型汽车操作系统 ,以快速构建智能座舱系统。
2.1.4 超级 APP(车机互联系统)
超级 APP 又称为 车机互联或手机映射系统 ,例如 CarPlay、CarLife 等。这类系统并非完整意义上的汽车操作系统,而是:
其优势在于生态成熟、更新迅速,但在车辆控制和深度整合方面能力有限。
2.2 系统软件层关键组成解析
2.2.1 底层 OS(操作系统内核):系统性能的决定性因素
操作系统内核( Kernel),又称为“底层 OS”,是整个系统软件层的核心,提供操作系统最基础的功能,包括:
由于内核开发难度高、安全性和实时性要求极为严格,其市场竞争格局相对稳定。目前车载领域主流内核包括 QNX、Linux、Android 内核及 WinCE 等。底层 OS 的能力直接决定了“软件定义汽车”的性能上限和安全基础。
2.2.2 BSP(板级支持包):连接内核与硬件的桥梁
BSP(Board Support Package)是操作系统与具体硬件平台之间的接口层,一般被视为操作系统的重要组成部分。BSP 主要包括:
- Bootloader :负责系统上电后的初始化和操作系统加载;
所有与具体硬件相关的代码均封装在 BSP 中。通过 BSP,操作系统可以将不同硬件平台抽象为统一的“虚拟硬件环境”,从而实现良好的硬件无关性和跨平台移植能力。
2.2.3 虚拟化层( Hypervisor):多系统共存的技术基础
为了在同一车载计算平台上运行多种不同类型的操作系统,虚拟化技术( Hypervisor)成为关键解决方案。Hypervisor 能够:
车载虚拟化操作系统通常需要具备以下能力:
通过虚拟化,整车电子架构得以高度集成,大幅降低硬件成本并提升系统灵活性。
2.2.4 中间件:软件开发与系统集成的 “纽带”
在中间件出现之前,车载软件往往直接基于操作系统开发,导致软硬件高度耦合,随着代码规模增长,系统复杂性和维护成本急剧上升。
中间件通过对底层硬件资源和系统服务进行统一封装,实现:
它为上层应用和算法提供统一服务接口,解决了数据传输、任务调度、系统集成和流程管理等问题,显著提升了应用开发效率。
2.2.5 AUTOSAR :汽车中间件的主流标准
AUTOSAR(Automotive Open System Architecture)是当前汽车电子领域最重要的软件标准之一。该标准经过十余年的发展,已经形成成熟的技术体系和广泛的产业生态。
AUTOSAR 的核心价值在于:
AUTOSAR 的整体架构自上而下依次包括:
- 应用层( Application Software Layer) ;
- 运行时环境( Runtime Environment,RTE) ;
- 基础软件层( Basic Software Layer,BSW) ;
各层之间通过严格定义的接口进行交互,每一层只调用其下一层的接口,同时向上一层提供服务,从而确保系统的独立性、稳定性和可维护性。
三、 功能软件层(Functional Software Layer)
在智能汽车软件架构中, 功能软件层是承接系统软件层与应用软件层的关键中间层 ,也是自动驾驶系统能够规模化落地的重要基础。该层主要包含自动驾驶及智能网联相关的 核心共性功能模块 ,这些模块通常具有高度通用性,可被不同车型、不同应用场景重复使用。
3.1 功能软件层的组成与定位
功能软件层主要包括但不限于以下内容:
- 自动驾驶通用框架 :如感知、定位、规划、控制等算法模块的统一调度与管理框架;
- 网联功能模块 :包括 V2X 通信、车路协同接口、数据上传与下发机制;
- 云控与云协同模块 :用于支持云端与车端之间的协同计算、模型更新和策略下发;
- 系统服务与公共能力模块 :如日志管理、时间同步、数据管理、健康监测等。
这些核心共性功能模块通常与底层的系统软件(操作系统、中间件、通信机制等)紧密结合,共同构成一个 完整的自动驾驶操作系统或智能驾驶软件平台 ,为上层自动驾驶算法和应用功能提供稳定、高效、可扩展的运行基础。
3.2 功能软件层在自动驾驶中的关键作用
功能软件层的核心价值在于 “ 平台化与标准化 ”。通过对底层能力进行统一封装,并对上层应用提供标准接口,它能够:
在自动驾驶系统中,功能软件层往往承担着算法调度、数据流管理、模块协同与系统级安全保障等关键任务,是连接 “底层算力资源”与“上层智能能力”的桥梁。
3.3 功能软件层的产业合作模式
在功能软件领域, 车企与软件供应商之间的合作模式尤为重要 。相较于整车厂,专业软件供应商往往具备以下优势:
- 软件模块已在多个项目和应用场景中反复验证,成熟度与可靠性更高;
- 拥有跨车型、跨平台的开发经验,能够快速适配不同硬件架构;
因此,通过与供应商合作,车企能够更高效地满足自身智能汽车产品的研发需求。
3.4 不同车企的软件合作策略
针对车企自身研发能力的差异,软件供应商通常采取差异化的合作方式:
供应商更多提供 “功能模块级”解决方案,向车企开放清晰、干净的接口,使车企能够:
1. 自主整合各功能模块;
2. 完全掌控用户体验和产品定义;
3. 构建具有鲜明品牌特色的软件体系。
供应商则往往提供 “软硬件一体化集成交付方案”,涵盖计算平台、基础软件、功能软件乃至部分应用层内容,帮助车企:
1. 快速完成智能化功能落地;
2. 显著缩短研发周期;
3. 降低整体开发和集成风险。
这种分层、灵活的合作模式,使功能软件层成为当前智能汽车软件产业链中最为活跃、商业模式最为多样的领域之一。
四、 应用软件层(Application Software Layer)
4.1 应用软件层的基本定义与功能范围
应用软件层运行在 广义操作系统 (包括系统软件层与功能软件层)之上,直接面向整车功能实现和用户体验,是智能汽车软件架构中 最贴近用户的一层 。
该层主要包括:
应用层软件通过调用功能软件层提供的标准接口,实现具体业务逻辑和功能呈现,是车辆智能化能力的直接体现。
4.2 应用软件层的参与主体
从产业角度看,应用层指的是 直接提供应用功能的企业或开发主体 。由于该层直接决定用户体验和产品差异化,目前参与者极为多元,包括:
不同类型的企业在应用软件层各有优势,也推动了该层技术与商业模式的快速演进。
4.3 OEM 在应用软件层的战略重点
上层应用软件层是 OEM 最为重视、也是最具差异化空间的领域 。相比底层系统软件和功能软件,上层应用更容易体现品牌特征和用户价值,例如:
因此,当前整车厂普遍加大在应用层的自研投入,力求通过软件能力塑造长期竞争优势。
4.4 短期与长期价值判断
从产业发展节奏来看,汽车软件价值呈现出明显的阶段性特征:
若企业希望真正落地 SOA(面向服务架构) 软件架构,虚拟化技术、系统内核以及中间件(如 AUTOSAR)等系统软件基础能力仍然至关重要。没有稳定、可靠的底层和功能软件支撑,上层应用难以规模化运行。
随着 SOA 架构成熟、统一操作系统和软件平台逐步成型,底层能力趋于标准化和通用化, 真正具备高附加值的将是上层应用与算法 。丰富的应用生态、持续演进的算法能力以及对用户数据的深度理解,将成为汽车软件产业中价值空间最大的部分。
智能汽车软件通过系统软件层、功能软件层与应用软件层的分层架构设计,构建起从底层硬件资源管理到上层智能功能实现的完整软件体系。其中,系统软件层为整车提供安全、稳定和高效的运行基础;功能软件层通过平台化和模块化设计,支撑自动驾驶与智能网联能力的规模化落地;而应用软件层则直接面向用户体验与功能呈现,是整车厂实现产品差异化和品牌价值的重要载体。
从产业发展阶段来看,短期内,虚拟化技术、操作系统内核以及中间件等系统级软件仍是支撑 SOA 架构落地和复杂功能运行的关键基础,决定了整车软件平台的稳定性与可扩展性。然而,从长期趋势看,随着底层架构逐步标准化和成熟化,汽车软件的核心价值将不断向上迁移,应用生态、算法能力以及围绕用户的服务创新将成为竞争焦点。
未来,随着中央计算架构的普及、软件平台的统一以及生态体系的不断完善,智能汽车软件将呈现出更强的平台属性和生态属性。谁能够在保障底层稳定性的同时,构建丰富、高质量的应用与算法体系,谁就有望在新一轮汽车产业竞争中占据主动地位。
| 






 订阅
订阅