| 编辑推荐: |
本文主要介绍AUTOSAR系统全流程开发概述,控制器抽象层MCAL的定位与作用,复杂设备驱动CDD的引入背景与意义,基础软件核心模块的系统性支撑作用和分层验证体系的工程价值,希望对你的学习有帮助。
本文来自于汽车电子与软件,由火龙果软件Alice编辑,推荐。 |
|
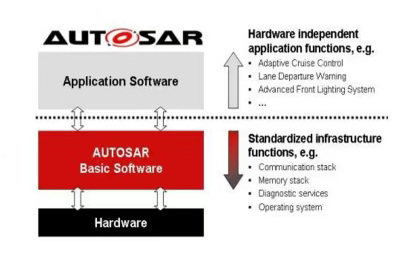
随着汽车电子电气架构持续向高度集成化、智能化和软件定义方向演进,传统以单一功能为核心、紧耦合软硬件的 ECU 开发模式已难以满足整车系统在规模、复杂度和生命周期管理方面的要求。在此背景下,AUTOSAR(AUTomotive Open System ARchitecture)作为全球汽车产业广泛采用的软件架构标准,应运而生,并逐渐成为车载 ECU 软件开发的事实标准之一。
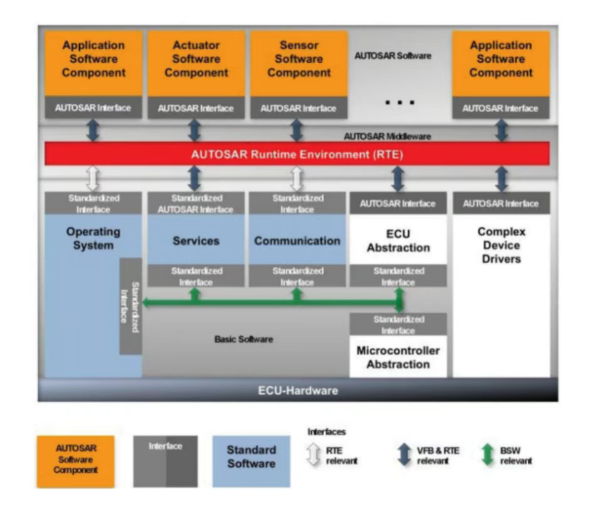
从整体视角来看,AUTOSAR 系统的开发并非单一软件模块的实现过程, 而是一个覆盖底层硬件适配、基础软件构建、中间件服务集成以及上层功能应用部署的完整系统工程 。该过程遵循自底向上、分层解耦的设计理念,通过标准化接口与模块化设计,将复杂系统拆解为职责清晰、边界明确的多个层级,从而实现软件的可移植性、可复用性与可维护性。
在工程实践中,AUTOSAR 系统开发通常围绕三大关键技术环节有序推进:
第一, 面向硬件平台的抽象与适配 ,通过标准化驱动与硬件抽象层实现对底层 MCU 及外设资源的统一访问;
第二, 基础软件与系统服务的构建 ,为操作系统调度、通信、诊断、存储等共性功能提供统一支撑;
第三, 应用功能的集成与运行管理 ,在标准运行时环境的支持下,实现整车功能逻辑的模块化组合与协同运行。
为确保系统在不同开发阶段均具备可验证性和可控性,AUTOSAR 体系通常配套构建 “内核层—系统层—应用层” 三级验证体系。通过分层验证与逐级联调相结合的方式,对系统的实时性、稳定性、一致性和功能正确性进行全面覆盖,形成贯穿开发全生命周期的验证闭环。这种工程化方法为 AUTOSAR 系统在复杂工况和长期运行条件下满足车规级可靠性要求提供了重要保障。
目 录:
1. AUTOSAR系统全流程开发概述
2. 控制器抽象层MCAL的定位与作用
3. 复杂设备驱动CDD的引入背景与意义
4. 基础软件核心模块的系统性支撑作用
5. 分层验证体系的工程价值
6. 总结
一、AUTOSAR系统全流程开发概述
1.1 系统开发流程
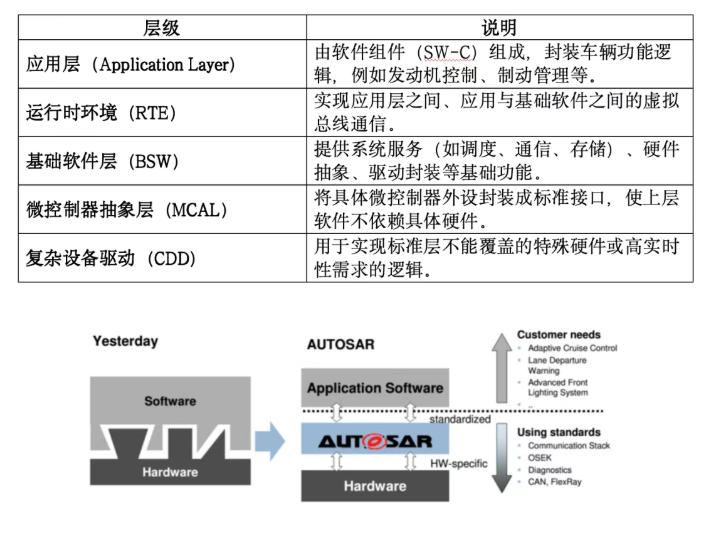
AUTOSAR 系统开发是一个 自底向上、层次清晰的系统工程过程 ,主要包括以下阶段:
1. 底层硬件适配: 通过 MCAL 对微控制器及外设进行标准化封装,实现软硬件解耦。
2. 基础软件配置与集成: 包括操作系统、通信模块、存储管理、诊断服务等,构建整车功能运行的基础平台。
3. 中间件及应用功能集成: 在运行时环境(RTE)支持下,将软件组件(SWC)组合为完整的功能系统,提供整车业务逻辑。
在工程实践中,这一流程强调模块化、标准化接口设计以及可移植性,确保系统在多平台、多项目间的复用能力。
1.2 分层验证体系
AUTOSAR 系统开发中, 验证体系与开发流程紧密耦合 ,通过“内核层—系统层—应用层”三级验证,实现全生命周期质量控制:
- 内核层验证 :操作系统调度、驱动与硬件抽象层的实时性与稳定性。
-
系统层验证 :基础服务的完整性与协同一致性,包括通信、存储、诊断模块等。
-
应用层验证 :整车功能应用的场景化验证及边界条件测试。
分层验证保证了单层正确性,同时发现跨层交互问题,从而形成覆盖开发、集成与验证全过程的闭环。
二、控制器抽象层 MCAL 的定位与作用
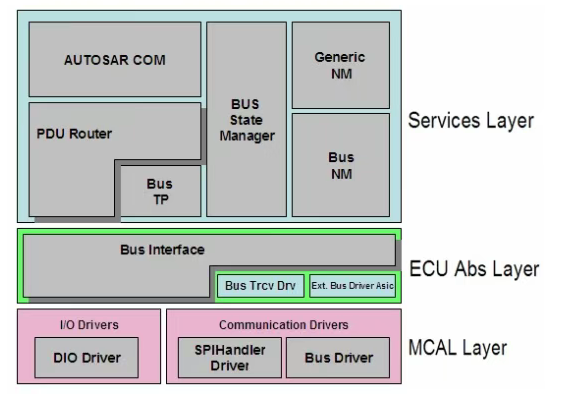
2.1 MCAL 在 AUTOSAR 架构中的角色
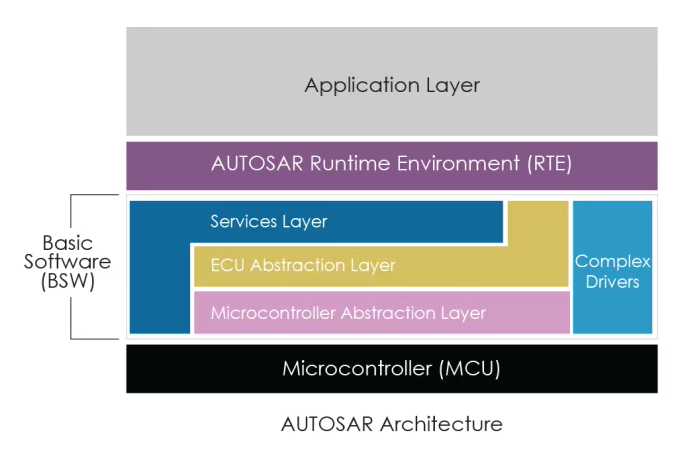
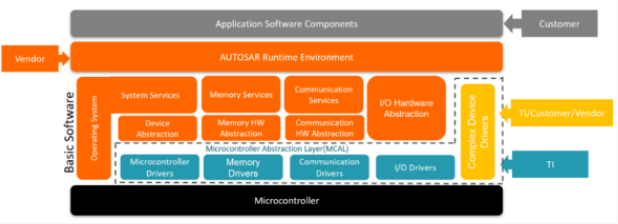
在 AUTOSAR 分层架构中,微控制器抽象层(MCAL,Microcontroller Abstraction Layer)处于整个基础软件体系的最底层,是直接与硬件平台打交道的关键软件层级。其核心使命在于: 通过统一、标准的接口屏蔽不同微控制器在架构、寄存器和外设实现上的差异,从而实现软硬件解耦。
在没有 MCAL 的传统嵌入式系统中,上层软件往往直接访问 MCU 寄存器或依赖特定芯片特性,这种方式在单一项目中或许高效,但一旦硬件平台发生变化,软件便需要大规模重构。AUTOSAR 通过引入 MCAL,将硬件相关细节封装在标准驱动模块内部,使上层基础软件与应用软件仅通过规范化接口进行访问,从根本上提升了系统的可移植性。
2.2 MCAL 的核心技术优势
从工程与架构角度来看,MCAL 的价值主要体现在以下几个方面:
第一,标准化接口实现硬件抽象。
MCAL 为时钟、端口、定时器、通信接口、存储控制器等常见 MCU 外设提供统一的接口规范。上层软件无需了解外设的寄存器结构或具体实现方式,只需按照 AUTOSAR 定义的 API 调用即可完成相应操作。
第二,支持车规级功能安全与可靠性需求。
在设计层面,MCAL 通常遵循车规级开发流程,支持错误检测、状态反馈以及与诊断机制的协同,为满足功能安全和可靠性要求提供底层支撑。
第三,降低重复开发成本。
通过模块化和标准化设计,MCAL 驱动可以在多个项目中复用,避免在不同 ECU 或平台上重复实现相同外设功能。
第四,与自动化工具链深度结合。
MCAL 通常与 AUTOSAR 配置工具配套使用,通过图形化配置与代码自动生成,大幅降低人工配置和集成的复杂度,提高工程效率。
2.3 MCAL 配置过程的工程化理解
在工程实践中,MCAL 的引入并不意味着“即插即用”,而是需要根据具体硬件平台与系统需求进行合理配置。从科普角度看,这一过程可以理解为: 在不暴露硬件细节的前提下,为系统选择合适的硬件能力并明确其使用方式 。
通常,芯片厂商会提供符合 AUTOSAR 规范的 MCAL 驱动库及配套文档,涵盖外设能力说明、配置选项以及接口约束。开发者通过专用配置工具(如DaVinci Configurator),对时钟体系、I/O 资源分配、通信通道、中断机制等内容进行参数化描述。最终,工具根据配置结果自动生成符合 AUTOSAR 规范的代码,并将其纳入基础软件工程中。
这种 “参数化描述 + 自动生成” 的模式,使 MCAL 配置从传统的手工编码工作,转变为可追溯、可维护的工程配置过程,有效降低了系统复杂度。
三、复杂设备驱动 CDD 的引入背景与意义
3.1 为什么需要 CDD
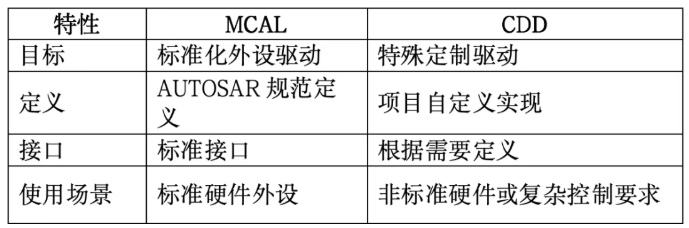
尽管 MCAL 覆盖了绝大多数通用 MCU 外设,但在实际项目中,仍然存在一些特殊需求无法通过标准驱动模块直接满足。例如:
-
硬件功能具有高度定制化特征
-
外设访问逻辑复杂,涉及特殊时序或状态机
-
对实时性要求极高,需绕过部分通用抽象机制
-
厂商提供了专有硬件模块,尚未被 AUTOSAR 标准纳入
为解决上述问题,AUTOSAR 引入了复杂设备驱动(CDD,Complex Device Driver)这一扩展机制。
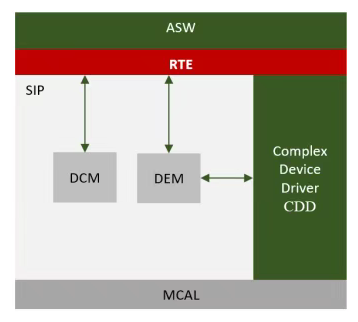
3.2 CDD 在架构中的定位
CDD 位于 MCAL 之上、基础软件层内部,是 AUTOSAR 架构中灵活性最高的驱动层级。它在遵循 AUTOSAR 基本架构原则的前提下,允许开发者针对特定硬件或功能需求进行定制化实现。
从系统视角看,CDD 起到了一种 “规范与灵活之间的平衡器” 作用:
1. 一方面,它不破坏 AUTOSAR 的整体分层与接口原则;
2.另一方面,又为系统保留了足够的扩展空间,以应对标准无法覆盖的实际工程需求。
3.3 CDD 的工程特性
从开发特性来看,CDD 具备以下几个显著特点:
兼容性:
CDD 可以与 AUTOSAR 的操作系统、通信机制及诊断体系协同工作,不会破坏系统整体架构。
易理解性:
CDD 的开发模式与传统嵌入式驱动较为接近,开发人员可在一定程度上直接操作底层资源,有利于从非 AUTOSAR 平台向 AUTOSAR 平台的过渡。
规范性:
尽管具有较高自由度,CDD 仍需遵循命名规则、接口约束和错误处理机制,从而保持系统的一致性与可维护性。
3.4 看门狗机制的科普性理解
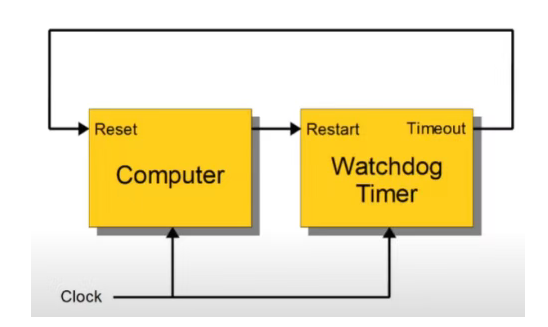
在车规级 ECU 软件中,系统运行的稳定性和安全性是最核心的设计目标之一。看门狗(Watchdog)机制是一种经典的软硬件联动运行监控机制,其基本思想是:通过硬件或软件定时检查运行状态,在软件失控或阻塞时触发复位或恢复动作。AUTOSAR 标准定义了一个 Watchdog 软件栈,用于在规范的分层架构下实现这种监控功能。
然而,并非所有监控需求都能简单地通过标准 Watchdog 驱动满足:某些功能可能要求监控更高层次的逻辑,如复杂设备驱动(CDD)内部的算法状态机、运行任务有效性等。在这种情况下,可以在 CDD 层引入看门狗监控,并通过 AUTOSAR 的 Watchdog 管理机制与 Watchdog Manager 协同工作。
可以将其理解为系统为自身设置的一道“安全保险”:只要软件能够在规定时间内证明自己仍然处于正常运行状态,系统便持续工作;一旦超时未响应,硬件便介入执行复位或恢复操作,从而避免异常状态无限持续。
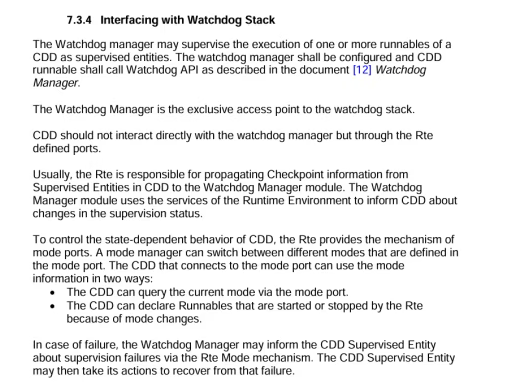
CDD 在此类安全相关功能中,往往承担着连接硬件能力与系统安全策略的重要角色。根据 AUTOSAR 的官方设计规定:
-
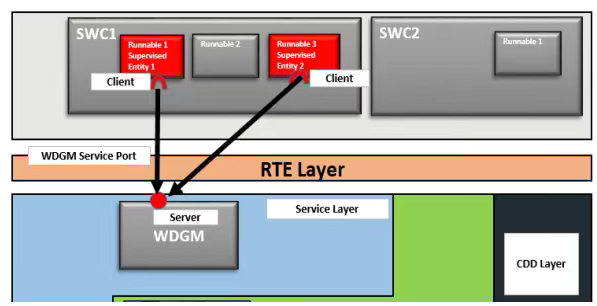
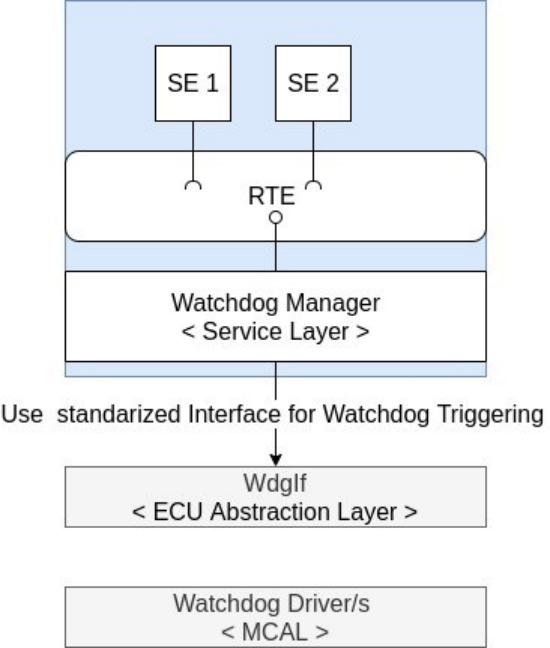
Watchdog Manager(WdgM)是对整个看门狗栈功能的统一管理入口,上层软件(含 CDD)应通过 RTE 定义的接口(ports) 与 WdgM 交互,而不是直接访问底层看门狗驱动。
-
CDD 可被配置为一个 被监督实体(Supervised Entity) ,受到 Watchdog Manager 的监控。CDD 内部的执行状态通过 RTE 调用 Watchdog API 向 Watchdog Manager 报告检查点(Checkpoint)信息。
-
Watchdog Manager 模块负责将这些检查点映射到底层的看门狗驱动来完成实际的监控行为。
-
如果出现异常情况(例如检查点未按预期触发、或运行超时等),Watchdog Manager 可通过 RTE 的模式端口(Mode Port)向 CDD 通知监督失败,让 CDD 自主采取恢复措施。
这种设计保持了 CDD 与 Watchdog 基础模块之间的一致性,使 CDD 既可以利用 AUTOSAR 的监控机制,又不破坏整体架构的层次化与标准化原则 。
四、基础软件核心模块的系统性支撑作用
在 AUTOSAR 系统中,操作系统、存储服务和通信服务构成了支撑整个 ECU 运行的三大基础支柱。它们并非独立存在,而是通过统一架构与接口规范协同工作。
4.1 操作系统(OS):系统运行的“节拍器”
汽车嵌入式系统中的操作系统具有高度专用化特征,其核心目标在于以最小的资源开销提供确定性的实时调度能力。AUTOSAR 架构继承并发展了传统 OSEK/VDX 操作系统的设计思想,通过严格限定操作系统的职责边界,将通信、存储和诊断等功能交由独立的基础软件模块实现,从而构建出一种高度模块化、可扩展且符合车规级要求的软件体系。这种设计模式使 AUTOSAR OS 能够在复杂多变的汽车应用场景中,持续满足实时性、可靠性和可维护性的综合需求。
AUTOSAR OS 负责管理任务调度、中断响应和系统资源分配,其核心目标在于: 在有限计算资源下,确保关键任务获得确定性的执行时机 。
AUTOSAR OS 的任务调度机制类似于一个精密的节拍器,根据任务的重要程度和时间约束,合理安排 CPU 使用顺序。通过优先级划分与抢占机制,系统能够在高负载条件下依然保证关键功能的实时响应。
4.2 存储模块(Mem):数据可靠性的守护者
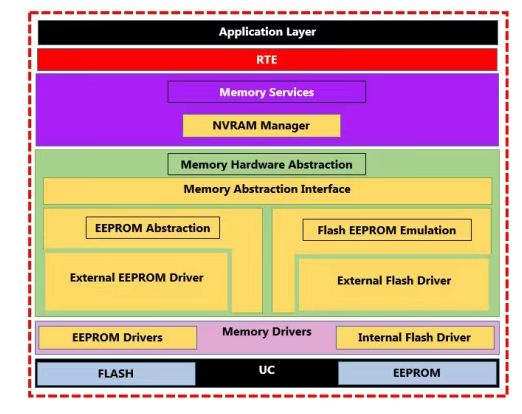
车载系统中大量参数、状态和诊断信息需要在掉电后保持不丢失。AUTOSAR 存储体系通过对非易失性存储资源的统一管理,为上层软件提供可靠的数据持久化能力。可以将其理解为: 在硬件存储之上建立一层逻辑管理机制,使软件不必关心具体存储介质和地址分布,只需关注数据本身的读写需求。
存储栈(Memory Stack,简称 MemStack)是 AUTOSAR 基础软件中的关键组成部分,主要用于在汽车电子系统中实现对非易失性存储器(Non-Volatile Memory,NVM)的统一管理。随着整车电子功能复杂度的不断提升,大量关键数据(如系统参数、标定数据、诊断信息及运行状态数据)需要在掉电或复位后得以可靠保存,这对存储管理机制提出了更高要求。
MemStack 在 AUTOSAR 环境中承担着为应用层软件和基础软件模块提供标准化非易失性存储访问服务的职责。通过统一的接口,MemStack 支持对非易失性数据的读写、管理与维护,确保数据按照既定结构进行存储,并在访问效率和数据一致性方面满足车规级要求。同时,存储栈对底层非易失性存储设备进行了充分抽象,使上层软件无需关心具体硬件实现细节,从而实现同一套软件在不同存储介质和硬件平台上的无缝适配。
通过这种分层与抽象设计,AUTOSAR 存储栈不仅提升了非易失性数据管理的可靠性与一致性,也为整车软件系统的可扩展性和长期维护提供了坚实基础。
4.3 通信模块(Com):系统协同的纽带
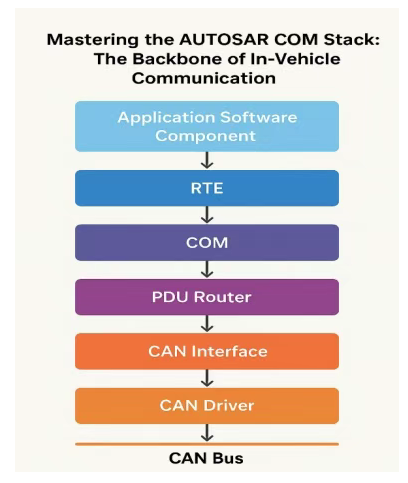
现代汽车 ECU 并非孤立运行,而是通过车载网络进行信息交互。AUTOSAR 通信栈通过分层设计,将物理通信、数据路由和信号处理解耦,实现跨模块、跨 ECU 的可靠通信。
在 AUTOSAR 分层架构中,通信栈(Communication Stack,简称 ComStack)负责实现整车范围内各电子控制单元(ECU)之间的网络通信,是支撑分布式汽车电子系统协同工作的核心基础软件之一。
从功能定义上看,ComStack 可被理解为“一组为基础软件(BSW)模块以及应用层软件提供统一通信服务的软件层集合”。在 AUTOSAR 架构中,通信栈整体隶属于基础软件层,通过严格的分层设计与标准化接口,实现通信功能的高度抽象与解耦。
从系统视角看,通信模块的意义不仅在于“数据能否发送”,更在于 数据是否能够按照预期的周期、格式和路径稳定传递 ,这对于整车功能协同至关重要。总体而言,AUTOSAR 通信栈通过严格分层与模块化设计,实现了通信功能的高度标准化和可扩展性,为分布式汽车电子系统提供了稳定、可靠且可移植的通信基础。
五、分层验证体系的工程价值
AUTOSAR 系统的复杂性决定了单一层级的验证无法覆盖全部风险,同时AUTOSAR 分层架构本身将软件功能划分为基础服务、系统服务与应用逻辑三层,这一架构天然支持在不同验证层级中分别应用相应的验证方法,从而形成自内核层到系统层再到应用层的完整验证闭环。因此,工程实践中通常采用“内核层—系统层—应用层”的分层验证策略。
-
内核层验证 关注运行基础是否稳定可靠
-
系统层验证 关注基础服务是否协同一致
-
应用层验证 关注功能是否满足真实场景需求
通过这种由底向上的验证方式,系统问题能够在早期被发现并隔离,从而显著降低集成风险和后期修改成本。
5.1 内核层验证(基础软件与硬件抽象)
这一层主要验证操作系统、驱动、中间件等基础服务是否满足功能需求和实时特性。
对应 ISO 26262 中软件级和集成验证活动,通过 SIL/PIL 测试、静态分析、代码覆盖率分析等手段,验证基础软件模块的行为是否满足要求。
5.2 系统层验证(系统服务 & 协同行为)
系统层包括通信栈、诊断服务、存储服务等基础软件组合行为。验证重点是跨模块的协同一致性、边界条件和故障处理机制。
此层验证可以映射到 ISO 26262 的集成测试与系统测试部分,通过 HiL 测试、故障注入等方式开展。
5.3 应用层验证(功能级验证)
应用层验证主要关注最终整车功能与系统交互是否满足需求,如动力控制、制动逻辑、动态响应等。
这层验证通常覆盖系统级行为和安全目标,实现 ISO 26262 的系统级验证与确认(Validation)部分。
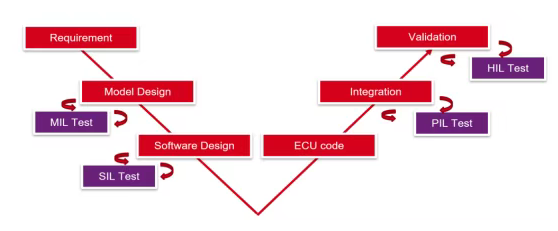
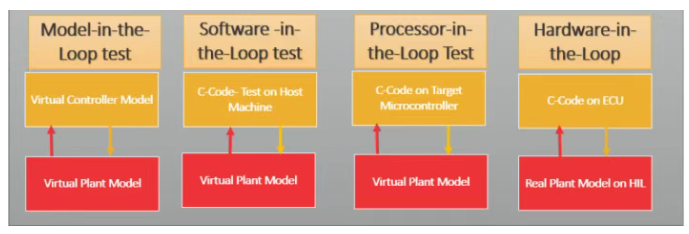
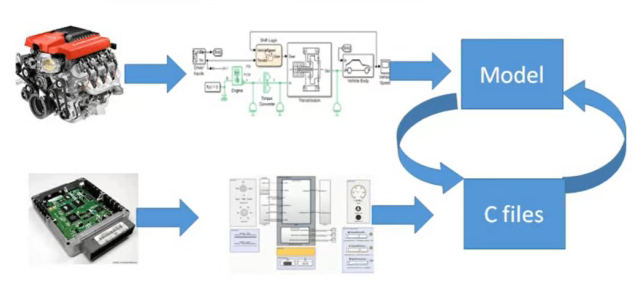
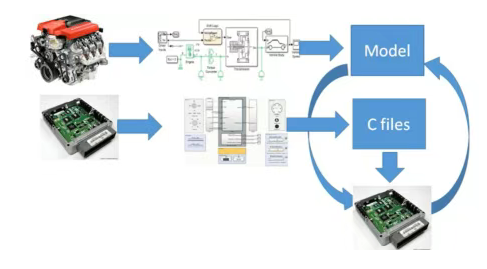
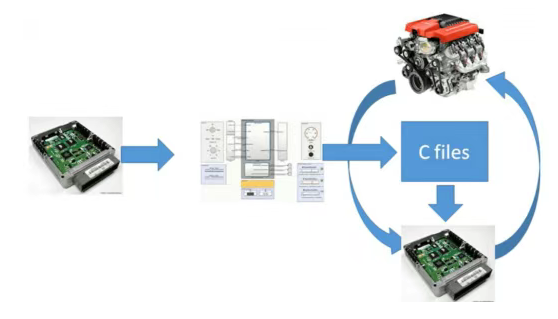
5.4 MiL / SiL / PIL / HiL 分层验证链
在 AUTOSAR 软件工程实践中,典型的验证体系(如 MiL、SiL、PIL、HiL)本质上就是对架构不同层和不同开发阶段的分层验证方法。例如:
-
MiL(Model-in-the-Loop): 主要针对模型级行为和逻辑验证,对应架构的功能定义阶段,能够在早期验证应用逻辑与数据流行为是否满足需求。
-
SiL(Software-in-the-Loop): 验证软件实现逻辑是否与模型一致,关注中间层(例如 RTE 行为)是否正确。
-
PIL(Processor-in-the-Loop): 在目标处理器或近似硬件平台上运行软件,验证基础软件与硬件抽象层(内核层)的集成正确性。
-
HiL(Hardware-in-the-Loop): 在实际或仿真硬件环境中进行集成验证,达到整车级应用层验证。
这种逐级验证策略本质上是根据 架构层次划分进行不同粒度的测试 ,可以理解为“内核层—系统层—应用层”的工程实践。
六、总 结
AUTOSAR 并非单纯的技术规范集合,而是一套 面向复杂车载系统的软件工程方法论 。MCAL 提供硬件抽象基础,CDD补足标准体系的灵活扩展能力,基础软件模块构建稳定运行环境,而分层验证体系则为系统可靠性提供持续保障。
正是这种分层解耦、标准驱动与工程验证相结合的设计理念,使 AUTOSAR 能够支撑现代汽车电子系统在功能复杂度和可靠性要求持续提升的背景下,依然保持可控、可扩展的发展路径。
| 






 订阅
订阅