| 编辑推荐: |
本文基于新能源汽车VCU的功能特性,系统拆解动力域核心功能、匹配计算类型、估算算力需求,并结合主流芯片参数给出针对性选型方案,为VCU设计提供全流程参考。希望对您的学习有所帮助。
本文来自于微信公众号汽车电子与软件 ,由火龙果软件Alice编辑、推荐。
|
|
在新能源汽车“大三电”系统中,整车控制器(VCU)作为动力域的核心控制单元,被誉为车辆的“大脑”。随着电子电气(EE)架构向中央控制器+域控制器演进,VCU的功能从传统的单一协调控制,逐渐向多合一集成化方向发展,其算力需求与芯片选型直接决定了动力域的控制精度、响应速度和安全等级。本文基于新能源汽车VCU的功能特性,系统拆解动力域核心功能、匹配计算类型、估算算力需求,并结合主流芯片参数给出针对性选型方案,为VCU设计提供全流程参考。
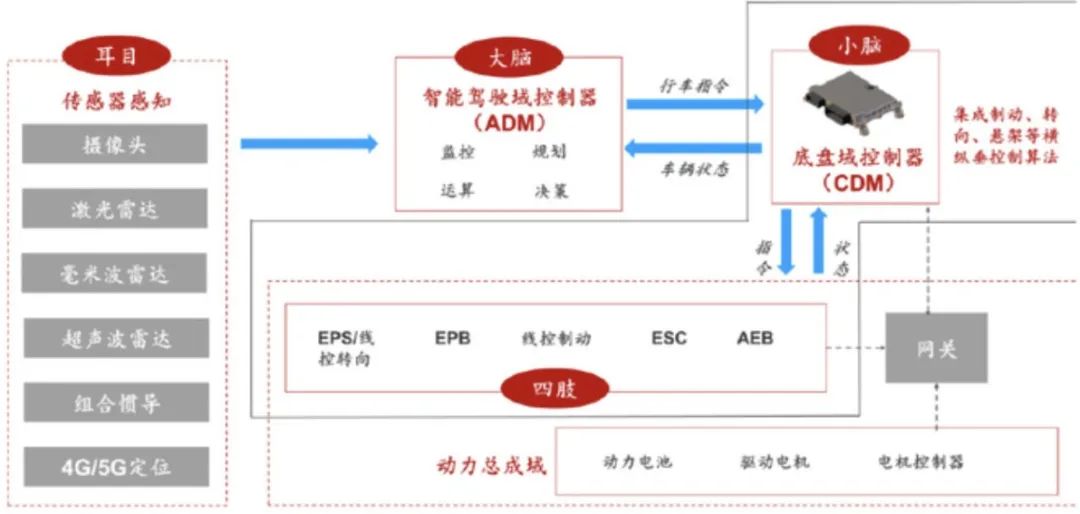
图 VCU一般是动力总成域的一个子集,参考《一文了解新能源汽车域控架构的基本组成》
顺便解释一个命名上的误解,虽然叫整车控制器但实际上VCU并不控制整车,它只管动力相关的一些事情,最多再加上空调。光看名字的话,它特别是容易和车身控制器的功能相混淆。
一、动力域核心功能细分
整车域控架构下的VCU不直接主导整车所有控制,核心功能集中于动力域,承担着动力输出、能量管理、安全监控等关键任务。
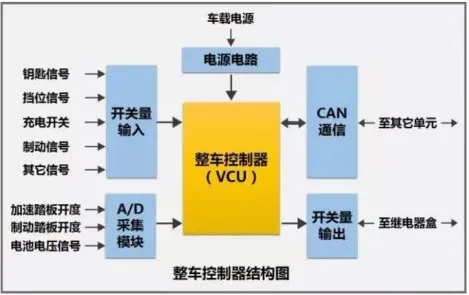
图 VCU主要管和动力相关的控制量,而且主要是和电动相关的,所以俗称大三电之一
结合VCU功能分类标准及动力域控制需求,其核心功能可细分为以下六大模块,各模块均需通过精准计算与实时响应保障车辆动力性能与安全性:
(一)动力输出控制模块
作为VCU最核心的功能模块,主要实现动力传递的精准调控,包括:
1. 驱动扭矩计算:根据加速踏板开度、电池剩余电量(SOC)、电机运行状态等信号,实时计算目标驱动扭矩,兼顾动力性与经济性,控制周期需达到10ms级,确保加速响应无延迟;
2. 制动扭矩协调:融合机械制动与再生制动扭矩,根据制动踏板开度、路面附着系数、电池状态等参数,动态分配二者比例,最大化能量回收效率的同时保证制动稳定性;
3. 蠕行扭矩控制:模拟燃油车怠速蠕行特性,基于挡位信号、制动状态计算最小驱动扭矩,实现低速平稳行驶,控制精度需达到±5N·m;
4. 转速协调控制:针对混动车型(xHEV)或增程车型,协调发动机与电机的目标转速,实现动力平顺切换,转速控制误差需小于50rpm。
(二)传动系统控制模块
聚焦动力传递效率优化,核心功能包括:
1. 扭矩动态分配:对于四驱车型,根据行驶工况(加速、爬坡、湿滑路面)实时分配前后桥电机扭矩,提升操控稳定性,分配响应时间需小于20ms;
2. 换挡策略执行:结合车速、油门开度、电池状态制定最优换挡逻辑,控制变速箱换挡时机与离合器结合力度,减少换挡冲击;
3. 传动链损失补偿:计算传动系统机械损耗,通过扭矩补偿算法抵消摩擦损失,提升动力传递效率;
4. 液力变矩器控制:针对搭载液力变矩器的车型,实现锁止离合器的精准控制,兼顾动力传递效率与舒适性。
(三)电力系统管理模块
负责高压系统与低压系统的协同工作,保障电能安全高效分配:
1. 高压上下电协调:控制高压继电器吸合/断开时序,实现预充电、主回路上电、下电等流程的安全管控,避免高压冲击损坏部件;
2. 电池功率闭环控制:根据电池管理单元(BMS)反馈的电压、温度、SOC等数据,动态限制电机输出功率与回收功率,防止电池过充、过放或过热;
3. 高低压转换协调:与DC/DC转换器联动,监控低压系统(12V)供电状态,确保空调、车灯等低压用电器正常工作;
4. 充电控制:涵盖交流充电(AC)与直流充电(DC)的全流程控制,包括充电枪状态识别、充电模式选择、预加热控制、充电参数诊断等,支持J1939、CCS等主流充电协议。
(四)热管理控制模块
保障动力域核心部件工作在最优温度区间,核心功能包括:
1. 电池热管理:根据电池温度传感器数据,控制电池加热器(HVH)、冷却泵等设备,实现低温加热、高温冷却,维持电池温度在15-35℃区间;
2. 电机热管理:监控电机温度,协调冷却回路流量,避免电机过热导致功率限幅;
3. 热管理设备诊断:对水温传感器、PTC加热器、冷却泵等部件进行状态监测,及时识别故障并触发保护机制。
(五)功能安全与故障响应模块
遵循ISO 26262功能安全标准,构建多层级安全防护体系:
1. 高压部件保护:实时监控高压配电盒(PDU)、电池高压配电盒(BDU)等部件状态,发生过压、过流、绝缘下降等异常时,立即切断高压回路;
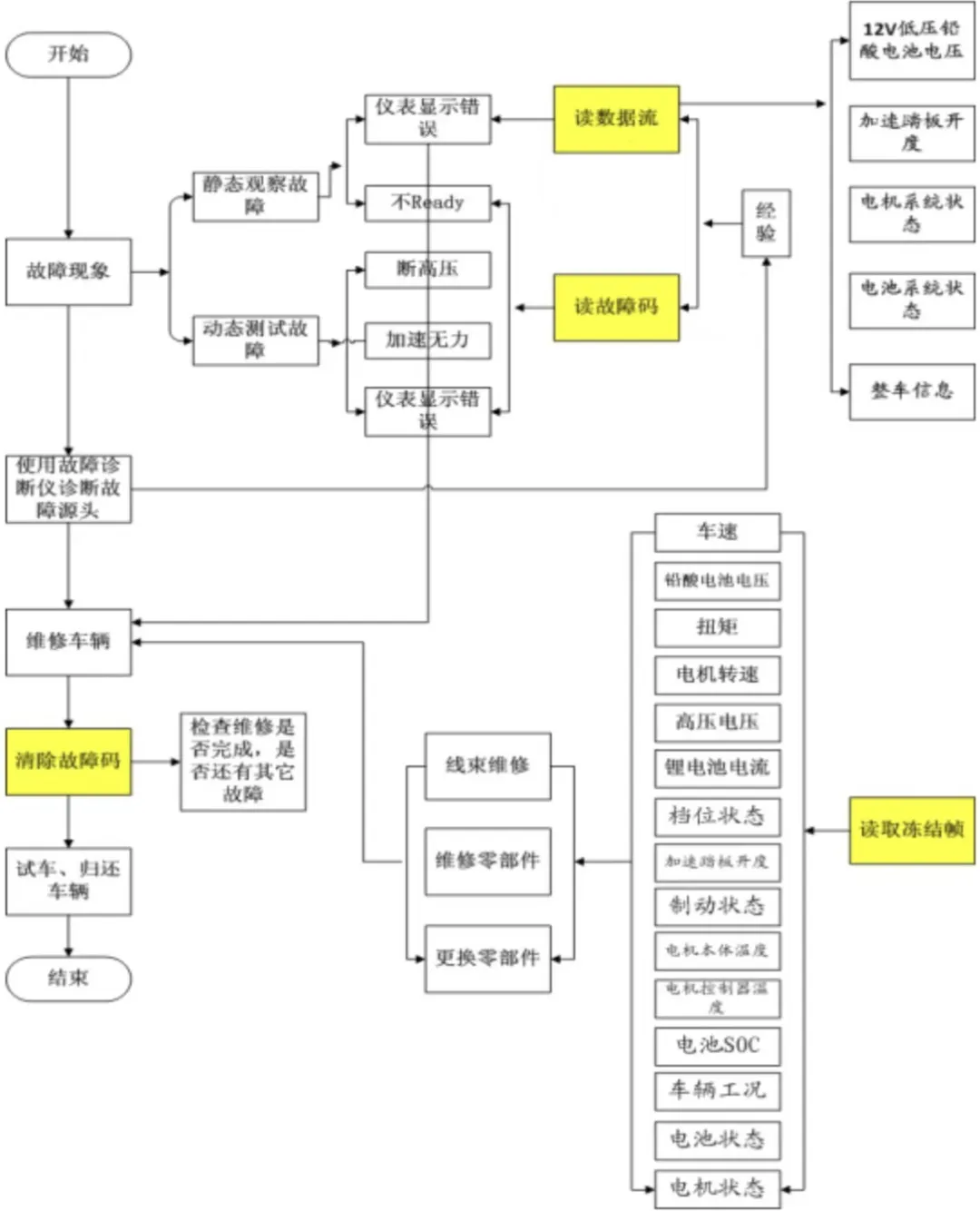
2. 故障诊断与分级:对传感器、执行器、通信链路等进行实时诊断,将故障分为轻微、中等、严重三个等级,执行对应的降级策略或停机保护;
图 VCU故障诊断流程图,来自网络
3. 冗余控制:关键计算任务采用双核心交叉验证,确保单一硬件故障时仍能维持基本控制功能,满足ASIL-B及以上安全等级要求。
(六)通信与协同模块
作为动力域的通信枢纽,实现多单元数据交互:
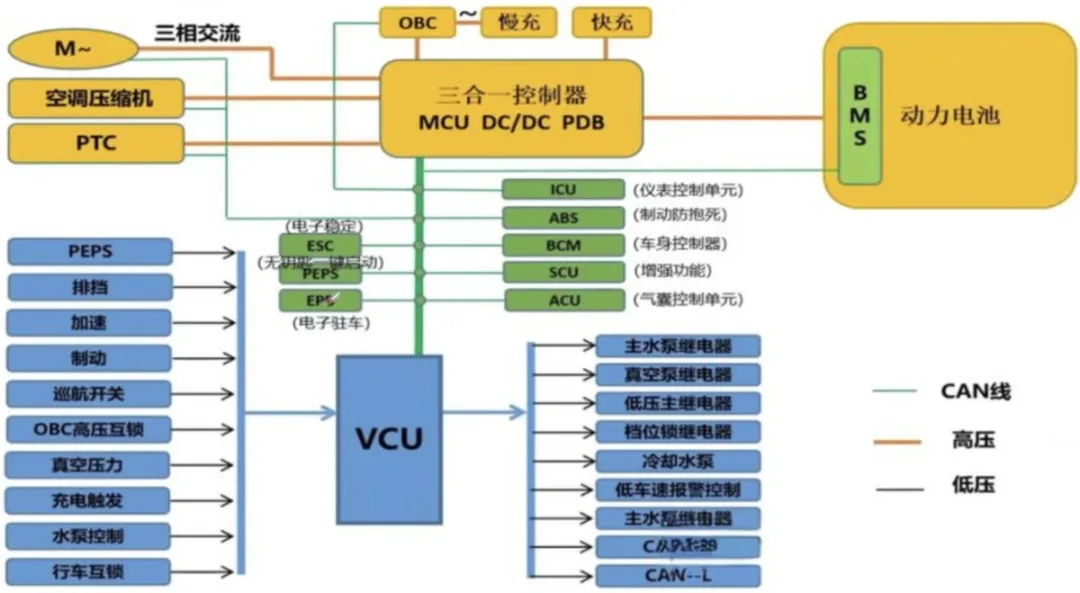
1. CAN/LIN总线通信:与BMS、电机控制器(IPU)、车载充电机(OBC)等单元通过CAN总线交互数据,波特率支持500kbps-1Mbps,部分高端车型采用CAN
FD提升传输速率;
图 VCU的总线通信,来自网络
2. 远程通信交互:通过T-BOX实现与云端的通信,支持充电状态监控、故障上报、远程升级(OTA)等功能;
3. 网关路由功能:转发动力域与车身域、智能驾驶域的交互数据,确保跨域控制指令的精准传递。
二、VCU主要功能与对应计算类型
VCU的各类功能本质上是不同计算任务的集合。
图 VCU详细功能概览,来自网络
根据运算特性、响应要求和数据处理方式,可将计算类型划分为五大类,各类计算任务的特性直接决定了算力需求的核心指标:
(一)实时控制类计算
对应功能:驱动扭矩计算、制动扭矩协调、蠕行控制、高压上下电时序控制等。
计算特性:以确定性实时响应为核心,要求低延迟(μs-ms级)、高可靠性,运算过程以定点/浮点运算、逻辑判断为主,无复杂算法但需高频次执行。例如,驱动扭矩计算需每10ms完成一次数据采集、运算与指令输出,单次运算包含加速踏板信号滤波、电池状态校验、扭矩限值计算等一系列逻辑操作。
核心要求:运算延迟≤5ms,控制周期稳定性≤1ms偏差,支持硬实时调度。
(二)数据处理类计算
对应功能:电池SOC/SOH计算、路面附着系数估算、温度数据融合、传动链损失计算等。
计算特性:需处理多源传感器数据,涉及复杂算法模型,运算量较大但控制周期相对宽松(50-100ms级)。例如,SOC计算采用扩展卡尔曼滤波(EKF)算法,需融合电压、电流、温度等多维度数据,进行矩阵运算与迭代求解;路面附着系数估算需通过车轮转速、车身加速度等信号进行动态建模,运算过程包含大量浮点运算。
核心要求:支持复杂算法加速(如FPU浮点运算单元),数据处理精度要求高,需要考虑多位小数点之后的数位,算法收敛时间≤30ms。
(三)通信交互类计算
对应功能:CAN/LIN总线数据解析、以太网通信、充电协议处理、网关路由等。
计算特性:以数据帧接收、解析、转发为核心,需处理多通道并发数据,运算过程以协议解码、数据校验、缓冲区管理为主。例如,VCU需同时处理来自BMS的电池数据、IPU的电机数据、OBC的充电数据等,单条CAN总线的数据包处理需包含ID识别、校验和验证、数据提取等操作,以太网通信需支持TCP/IP协议栈解析。
核心要求:支持多协议并发处理,CAN总线数据处理延迟≤1ms,以太网数据包转发延迟≤5ms,支持至少8路CAN接口扩展。
(四)安全监控类计算
对应功能:故障诊断、高压部件保护、冗余校验、功能安全监控等。
计算特性:以逻辑判断与冗余运算为核心,需对关键计算结果进行交叉验证,确保故障状态下的安全可控。例如,故障诊断需对每路传感器信号进行合理性校验(范围校验、变化率校验),关键控制指令需通过双核心独立运算并比对结果,偏差超过阈值时触发保护机制。
核心要求:支持冗余计算架构,故障识别延迟≤10ms,安全机制触发响应≤2ms。
(五)集成协同类计算
对应功能:多合一动力总成控制、四驱扭矩分配、充电-热管理协同控制等。
计算特性:是上述四类计算的综合叠加,需同时处理实时控制、数据处理、通信交互等多任务,运算量大且任务调度复杂。例如,比亚迪e平台3.0的8合1动力总成中,VCU需集成驱动控制、充电控制、热管理控制等功能,各类计算任务并发执行,需具备强大的任务调度与算力分配能力。
核心要求:支持多核异构调度,任务切换延迟≤1ms,算力预留≥30%以应对功能扩展。
三、计算类型对应的算力需求估算
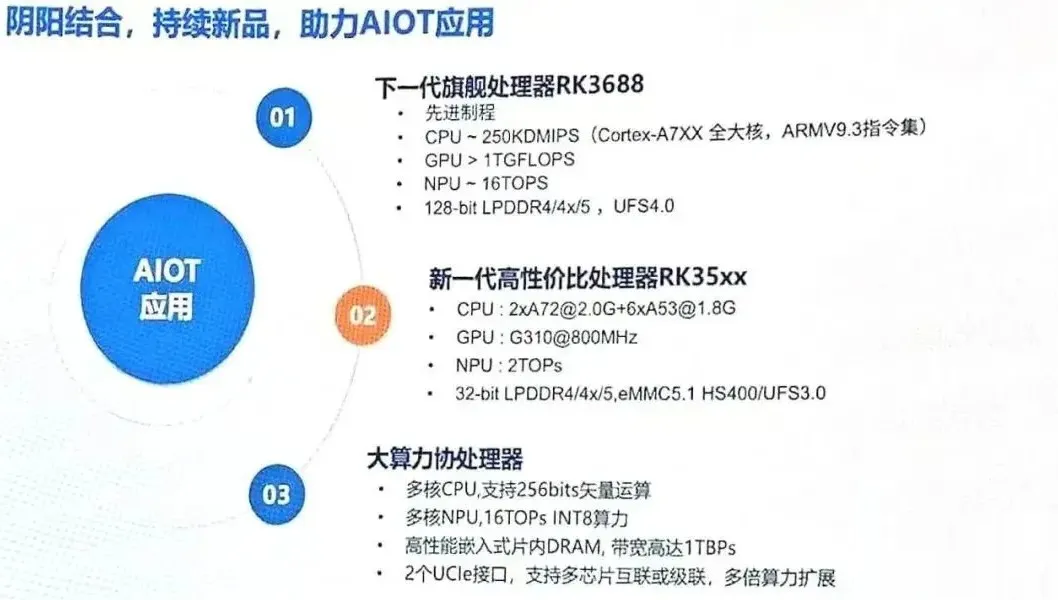
VCU的算力需求除了满足功能需求外,还要考虑算力叠加和冗余预留,本文采用行业通用的DMIPS(Dhrystone百万条指令每秒)作为算力计量单位(目前VCU中涉及GPU和NPU的计算不多,主要是CPU计算),结合控制周期、运算复杂度、任务并发数等参数,分模块完成算力核算。
图 瑞芯微下一代旗舰芯片RK3688 用DMIPS衡量其CPu性能
DMIPS全称为Dhrystone Million Instructions executed Per
Second,中文译为“每秒执行百万次Dhrystone指令”,是一种基于Dhrystone测试程序的CPU性能量化指标。
(一)单功能算力估算基准
1. 实时控制类:单个实时控制任务(如驱动扭矩计算)的控制周期为10ms,单次运算包含约2000条指令(逻辑判断+简单浮点运算),则该任务的算力需求为:(2000条指令/次
× 100次/秒)÷ 10^6 = 0.2 DMIPS。动力域典型配置包含8个核心实时控制任务(驱动扭矩、制动扭矩、蠕行控制、换挡控制、高压上下电、转速协调、扭矩分配、预充电控制),合计算力需求为8×0.2=1.6
DMIPS。此处需修正:实际汽车控制器的实时任务运算量更大,结合行业经验,单个高频实时控制任务(10ms周期)的算力需求约为5-8
DMIPS,8个任务合计40-64 DMIPS。
2. 数据处理类:SOC计算采用EKF算法,控制周期100ms,单次运算包含约50000条指令(矩阵运算+迭代求解),算力需求为(50000条指令/次
× 10次/秒)÷ 10^6 = 0.5 DMIPS。数据处理类包含SOC计算、附着系数估算、温度融合、传动链损失计算4个任务,合计算力需求为4×0.5=2
DMIPS。
修正后:复杂数据处理任务(如EKF-SOC)单次运算量约50万条指令,100ms周期对应的算力需求约5
DMIPS,4个任务合计20 DMIPS。
3. 通信交互类:单路CAN总线(500kbps)的数据处理需求约为2 DMIPS(含数据接收、解析、校验、转发),支持8路CAN总线的算力需求为8×2=16
DMIPS;以太网通信(100Mbps)需处理TCP/IP协议栈,算力需求约10 DMIPS;充电协议处理(CCS/CHAdeMO)需额外5
DMIPS,合计通信类总算力需求为16+10+5=31 DMIPS。
4. 安全监控类:故障诊断任务需对20路核心传感器、10路执行器进行实时监测,控制周期50ms,单次运算包含约30000条指令,算力需求为(30000条指令/次
× 20次/秒)÷ 10^6 = 0.6 DMIPS;冗余校验任务需对核心控制指令进行双核心交叉验证,算力需求为实时控制类算力的50%(约20-32
DMIPS),合计安全监控类总算力需求为0.6+30≈30.6 DMIPS(取整31 DMIPS)。
5. 集成协同类:多任务并发调度需额外消耗10-15%的基础算力,用于任务切换、资源分配、优先级管理;若集成充电-热管理协同、四驱控制等扩展功能,需新增30-50
DMIPS,合计集成协同类算力需求约为(40+20+31+31)×15% + 40≈60 DMIPS(按中高端配置估算)。
(二)不同配置VCU总算力需求汇总
根据车型定位、功能集成度的差异,VCU的总算力需求可分为三个等级,同时需预留至少30%的算力冗余,以应对OTA升级、功能扩展等需求:
1. 入门级VCU(经济型纯电车型,功能精简):仅保留核心动力控制与安全监控功能,无四驱、高级能量回收等功能,基础算力需求约80
DMIPS,预留冗余后总算力需求≥104 DMIPS,安全等级要求ASIL-B。
2. 中端VCU(主流家用车,部分集成功能):支持再生制动、充电控制、基础热管理功能,部分车型搭载两驱-四驱切换功能,基础算力需求约150
DMIPS,预留冗余后总算力需求≥195 DMIPS,安全等级要求ASIL-B至ASIL-D。
3. 高端VCU(豪华车型/多合一动力总成):集成8合1/7合1动力总成控制、高级四驱分配、充电-热管理协同、智能能量管理等功能,基础算力需求约300
DMIPS,预留冗余后总算力需求≥390 DMIPS,安全等级要求ASIL-D。
(三)算力估算关键影响因素
1. 功能集成度:多合一动力总成中,VCU需集成OBC、DC/DC、BMS等部分功能,算力需求较传统独立VCU提升50-80%;
2. 控制周期:高频控制任务(如扭矩计算)的周期从10ms缩短至5ms,算力需求翻倍;
3. 算法复杂度:采用深度学习算法优化能量管理策略时,算力需求较传统PID控制提升3-5倍;
4. 安全等级:ASIL-D等级要求的冗余计算会使算力需求增加30-50%,高于ASIL-B等级。
四、算力需求对应的芯片选型
芯片选型需严格匹配算力需求、安全等级、接口兼容性、集成度等核心指标,结合主流车规级MCU的参数特性,按入门级、中端、高端三个层级给出选型方案,并参考实际车型应用案例验证选型合理性:
(一)入门级VCU芯片选型(≥104 DMIPS,ASIL-B)
核心需求:性价比优先,满足基础动力控制与安全监控功能,接口丰富度适中。
1. 兆易创新GD32A490系列
核心参数:32位Cortex-M4内核,主频最高200MHz,算力约250 DMIPS(1.25
DMIPS/MHz),支持AEC-Q100 Grade 1车规认证,符合IATF 16949质量体系,内置1MB-8MB
Flash、192KB-512KB SRAM;
关键优势:具备出色的静电防护与抗干扰能力,可在-40℃~125℃极端环境下稳定运行,接口包含CAN、LIN、SPI等,满足入门级VCU的通信需求,国产化率高,供应链稳定;
适用场景:经济型纯电车型,如入门级A00级电动车、低速电动车。
图 兆易创新GD32A490系列,来自网络
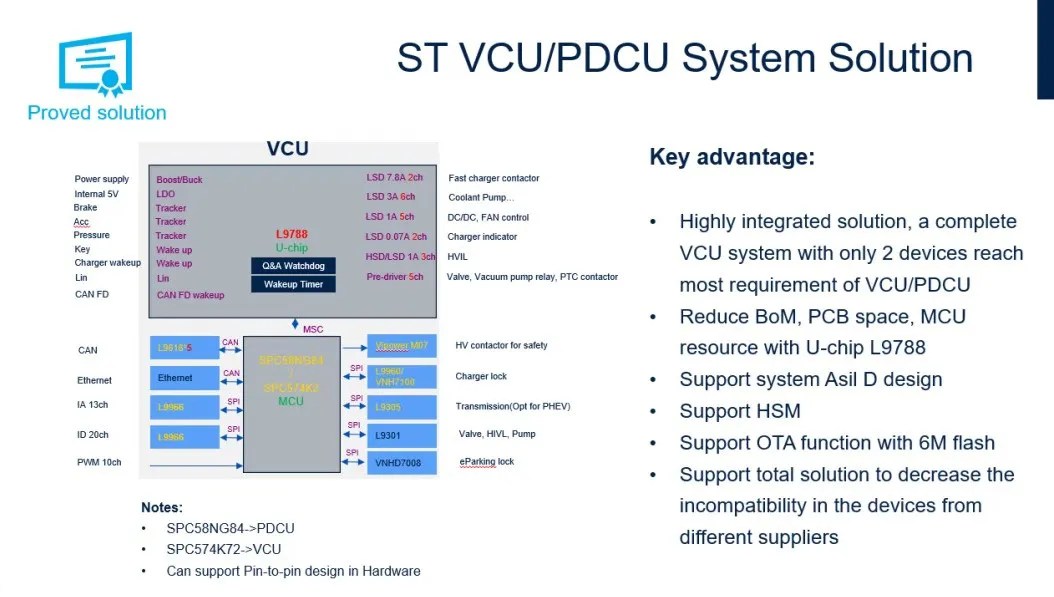
2. 意法半导体SPC574K72
核心参数:双核Cortex-R5内核,主频160MHz,算力约480 DMIPS(1.5 DMIPS/MHz),符合ASIL-B安全等级,内置6MB
Flash、512KB SRAM;
关键优势:性价比高,专为中低端VCU设计,集成LDO稳压器、CAN收发器等外设,可减少外围元器件数量,降低BOM成本;
适用场景:合资品牌入门级车型,如部分合资品牌纯电紧凑型车。
图 意法半导体使用SPC574K72的VCU解决方案,来自网络
(二)中端VCU芯片选型(≥195 DMIPS,ASIL-B至ASIL-D)
核心需求:平衡算力与成本,支持部分集成功能,满足中高端家用车的动力控制需求,安全等级达到ASIL-D。
1. 恩智浦MPC5744P
核心参数:32位Power Architecture架构,主频200MHz,算力约400 DMIPS(2
DMIPS/MHz),符合ISO 26262 ASIL-D安全等级,支持端到端纠错码(e2eECC)和可编程故障采集与控制单元(FCCU);
关键优势:集成丰富的外设接口(CAN、LIN、以太网),支持多协议通信,开发工具成熟,市场应用广泛,稳定性高;
适用场景:主流家用SUV、轿车,如部分自主品牌紧凑型纯电车型。
图 恩智浦/飞思卡尔的MPC5744P,来自网络
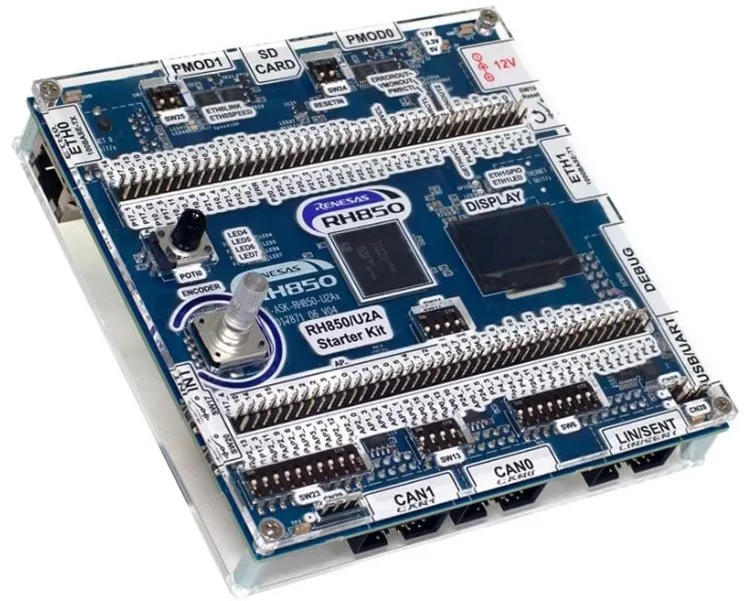
2. 瑞萨RH850/U2A
核心参数:多核Cortex-R52内核,主频最高240MHz,算力约720 DMIPS(1.5 DMIPS/MHz),符合ASIL-B和ASIL-D安全等级,内置eMMC大容量存储,支持4G/GPS/Wi-Fi/Bluetooth
LE联网功能;
关键优势:性能扩展空间充足,支持外载无线通信板,适合需要联网功能的中端车型,热管理控制相关外设集成度高;
适用场景:搭载智能网联功能的家用车,如具备远程控制、OTA升级的新能源车型。
图 瑞萨RH850/U2A,来自网络
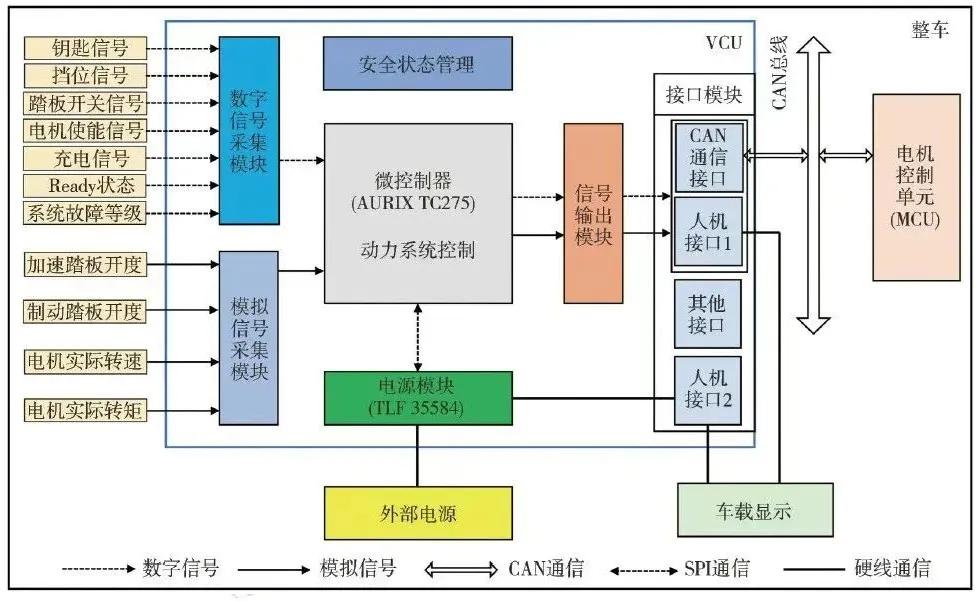
3. 英飞凌AURIX TC275
核心参数:3核TriCore处理器架构,主频200MHz,算力约900 DMIPS(1.5 DMIPS/MHz),安全管理单元(SMU)为核心安全组件,支持ASIL-D安全等级,集成CAN、LIN、以太网等丰富接口;
关键优势:实时控制性能出色,适合高频次扭矩计算、制动协调等任务,在动力域控制器中应用广泛,兼容性强;
适用场景:中高端家用车、混动车型,如部分插电式混合动力SUV。
图 英飞凌AURIX TC275在VCU中的架构图,来自网络
(三)高端VCU芯片选型(≥390 DMIPS,ASIL-D)
核心需求:高算力、高集成度、高安全等级,支持多合一动力总成控制、高级四驱分配等复杂功能。
1. 英飞凌SAK-TC397XX
核心参数:6核TriCore内核,主频300MHz,算力约3600 DMIPS(2 DMIPS/MHz),嵌入式RAM高达6.9MB,16MB
Flash,集成DSP和FPU单元,符合ASIL-D安全等级;
关键优势:算力充沛,支持多任务并发处理,适合8合1动力总成等高度集成化场景,阿维塔11的VCU(型号VDC
1100C)即采用该芯片,表现出卓越的控制精度与稳定性;
适用场景:豪华纯电车型、高性能混动车型,如高端智能电动车、豪华SUV。
2. 芯驰科技E3600系列
核心参数:(4+4)核Cortex-R52内核,主频600MHz,算力约4320 DMIPS(1.8
DMIPS/MHz),采用台积电22nm车规工艺,符合ASIL-D安全等级,内置国密商密硬件加速器,支持BGA和LQFP封装;
关键优势:集成丰富的通信外设模块,支持最多326个GPIO,大容量SRAM和先进嵌入式存储,适合超级动力域控场景,国产化自主可控,支持定制化开发;
适用场景:高端国产智能电动车、多合一动力总成车型,如搭载8合1动力总成的自主品牌旗舰车型。
3. 德州仪器AM263P4
核心参数:四核Arm Cortex-R5F内核,主频400MHz,算力约2400 DMIPS(1.5
DMIPS/MHz),符合ASIL-D安全等级,支持实时控制和可扩展存储器,集成高级外设以提升传感和驱动IP质量;
关键优势:联网功能强大,支持以太网、CAN FD等高速通信,适合融合智能驾驶辅助功能的动力域控制,开发工具链完善,技术支持及时;
适用场景:豪华智能电动车、具备高级驾驶辅助功能的新能源车型。
(四)实际车型芯片选型案例验证
1. 长安逸动EV460(中端车型):VCU型号XVCU03,采用恩智浦MPC5642AF0MVZ芯片(Power架构e200z4,主频150MHz,算力约300
DMIPS),匹配其中端家用车定位,满足动力控制、能量回收等核心功能需求,与本文中端VCU算力估算及选型建议一致;
2. 阿维塔11(高端车型):VCU型号VDC 1100C,采用英飞凌SAK-TC397XX芯片(6核300MHz,算力3600
DMIPS),支撑其多合一动力总成、高级四驱控制等复杂功能,符合高端VCU的算力需求与安全等级要求。
| 品牌 |
型号 |
描述 |
| 英飞凌(INFINEON) |
SAK-TC397XX-256F300S BD |
1颗低功耗MCU,6核主频300MHz,嵌入式RAM高达6.9MB,16MB
Flash,集成DSP内置FPU |
| 英飞凌(INFINEON) |
TLS203B0EJV |
1颗微功耗、低噪声、低压差的调节器,该器件能够实现300mA的输出电流,270mV的压差 |
| 英飞凌(INFINEON) |
TLF11251LD |
1颗栅极驱动器和MOSFET,集成驱动器、半桥,在单一封装中集成了高侧P沟道和低侧N沟道MOSFET |
| 恩智浦(NXP) |
TJA1145T/FD |
3颗高速CAN收发器 |
| 意法半导体(ST) |
SM30T33AY |
2颗汽车级3000W、28V TVS,SMC封装 |
| 意法半导体(ST) |
L9788 |
1颗采用ST BCD专有技术的PMIC,专为汽车发动机管理系统设计的集成电路 |
| 意法半导体(ST) |
VN7050AJTR |
1颗电源负载分配开关,高压侧,高电平有效,13V,1输出,30A,0.05ohm,
PowerSSO-16 |
| 德州仪器(TI) |
SN74AHC08BQAR |
2颗4通道、双输入、2V至5.5V高速 (9ns) 与门 |
| 瑞昱(REALTEK) |
RTL9000AN-VC |
1颗百兆以太网收发器 |
| 安世(NEXPERIA) |
BUK9K25-40E |
1颗双逻辑电平N沟道MOSFET,耐压值40V,最大电流29mA |
| - |
- |
阻容感、连接器、接口、结构件和紧固件等等 |
阿维塔11 VDC 1100C型VCU的BOM表
五、总 结
VCU作为新能源汽车动力域的核心控制单元,其算力估算与芯片选型是决定车辆动力性能、安全等级与功能扩展性的关键环节。本文有以下核心结论:
1. 算力估算需建立在功能精准拆解的基础上,按实时控制、数据处理、通信交互、安全监控、集成协同五类计算类型分别量化,同时预留30%以上冗余,以应对功能扩展与OTA升级需求;
2. 芯片选型需形成“算力-安全等级-接口-集成度”的四维匹配逻辑:入门级车型优先选择高性价比、国产化率高的芯片(如兆易创新GD32A490);中端车型平衡算力与成本,选择ASIL-D等级、接口丰富的芯片(如恩智浦MPC5744P);高端车型聚焦高算力、高集成度芯片(如英飞凌TC397、芯驰E3600);
3. 行业趋势方面,随着EE架构向中央域控演进,VCU功能将进一步集成,对芯片的多核异构计算能力、安全冗余设计、高速通信接口的需求持续提升,同时国产化芯片在车规级市场的份额将逐步扩大,为VCU设计提供更多高性价比选择。 | 






 订阅
订阅