| 编辑推荐: |
本文介绍了一种基于对象过程方法论(OPM)的无人机集群智能化指挥控制概念模型,旨在通过优化流程来加快作战决策速度,希望对您的学习有所帮助。
本文来自于微信公众号汽车ECU开发 ,由火龙果软件Alice编辑、推荐。
|
|
EPB( Electronic Parking Brake )系统即电子驻车制动系统,主要是用电子控制的方式取代原来使用驻车制动手柄、拉索等机械手动操作的部分,从而完成整个驻车制动过程。目前在汽车上应用的EPB技 术主要有两种形式:拉线式EPB和卡钳集成式EPB。其中前者属于较早在整车上应用的技术,而后者属于目前广泛应用的EPB技术。接下来看看EPB系统的功能规范。
01 . EPB设计规范
设计规范包含EPB系统的各种设计指标和参数,下面挨个来理一理。
富余量要求
EPB 设计最大驻车力为其实际最大驻车力的 90% ,设计有效行程为实际有效行程的 75% ,且设计驻车性能必须能满足法规及制动性能目标。
最小驻车控制电压
在 9v 的电压下, EPB 必须在车辆满载的情况下,车辆在上坡下坡两个方向上能够停驻在法规规定( 20% )坡道的上。
驻车能力
正常驻车情况下, EPB 必须能够使处于 D 挡的车辆保持停止状态;接近 0℃ 的冷车,空挡启动,切换至 R 档 /D 档时,车辆移动不得超过 50mm 。
EPB 指示灯
EPB 工作的时候,必须有指示灯点亮。
EPB 故障灯
电子控制传输、线路破坏、 EPB 内部原因等导致 EPB 故障,必须点亮相应故障警示灯。
IGN OFF 后 EPB 的夹紧与释放
IGN OFF 后,必须有残留电力确保能够夹紧 EPB (通过开关驱动),但是不允许释放 EPB 。
机械锁止
无论驾驶员是否在车上, EPB 必须能够通过纯机械方式保持锁止状态。
非预期电控失效
不能因任何电子传动元件故障,触发不期望动作(夹紧、释放、反复工作等)。
应急操作
如果线束破损(除了 ECU ,供电或者控制开关), EPB 必须能够保持以下选项中的一个
1. 在主驾位置能够控制 EPB 使满载车辆能在 9% 的坡道上,在上坡、下坡两个方向上保持驻车;
2. 在 9% 的坡道上,车辆停驻的时候 EPB 能够自动机械锁止,车辆重新起步的时候,锁止解除。
抗 冲击性
当 EPB 处于最大夹紧力状态时, EPB 必须能够承受时速 4km/h 的冲击而不受损坏。
耐久 性
EPB 的设计寿命必须能达到 10 年 24 万公里,并能通过整车耐久试验。(整车质保 3 年 10 万公里)
30% 的坡道驻车
整 车耐久试验(允许采用快速耐久试验方法)前后, EPB 必须能使处于空挡的满载车辆上坡、下坡两方向停驻在 30% 坡度的坡道上。
带拖车驻车
满载车辆,拖载重量 ≤750kg 时,必须满足 20% 驻坡能力。
频繁拉起
满载车辆,以 30km/h 的速度前进时进行 EPB 的 15 次动态夹紧和倒车方向以 15km/h 的速度进行 EPB 的 15 次动态夹紧,该过程不得造成车辆结构和性能的降低。
车辆起步
EPB 完全工作,车辆静态驻车的情况下,车辆起步时不得对车辆造成持续损伤。
运行温度
EPB 在以下温度下必须能够在 20% 的坡道上驻车
1 . 环境温度 -40~50℃ ;
2 . 车辆内部温度 -40~85℃ 。
耐环境性
EPB 必须被保护不受高温、腐蚀,盐雾和路面飞石等环境的影响。 EPB 系统规定在腐蚀性环境中 EPB 提供 10 年 24 万公里的功能寿命并且不会因为腐蚀引起功能消退或相关失效。
循环寿命
EPB 功能周期必须符合以下要求:
1. 温度要求: -40℃ , -20℃ , 85℃ 和常温;
2. 自动挡循环次数: 50,000 循环。
循环寿命 - P 档联动耐久
车辆满载状态,在 30% 的坡道上进行 200 次 P 档进出循环(上坡 100 次下坡 100 次),能够满足驻车要求。
循环寿命 - 快速反复使用
车辆静止在水平地面上,以最快的速度进行 20 次 EPB 的运行和释放, EPB 的功能正 常。
持续切换功能
车辆静止在水平地面上,以最快的速度进行 20 次 EPB 的运行和释放, EPB 的功能正常。然后持续按下 EPB 开关 10min 和拉起 EPB 开关 10min 后,功能不得有衰退。
电压波动性能
在 9~18v 之间, EPB 必须能够持续保持全功能:
9v— 满载车辆停驻在 20% 的坡道上(最小电压);
12.6v— 满载车辆停驻在 30% 的坡道上( IGN OFF );
13.5v— 满载车辆停驻在 30% 的坡道上(车辆运行);
16-18v— 对制动零部件没有损伤(最大设计运行电压);
24v— 对 EPB 没有损伤(不运行)。
制动尾灯控制
当车辆速度≥ 5km/h 时,拉起 EPB 开关,制动尾灯点亮;
当车辆速度< 5km/h 时,拉起 EPB 开关,制动尾灯不点亮。
EPB 行程要求
EPB 的最小行程设计需考虑以下情况的要求:
1 . 总成 初始 状态拉紧 要求;
2 . 具有自调整机构来补偿最大行程;
3 . 满足 30% 的坡道上驻车要求;
4 . 具有释放系统,能够消除制动拖滞;
5 . 75% 的最大行程处能够满足法规标准对坡道驻车的要求。
EPB 夹紧 时间
夹紧反应时间:EPB 在法规要求的坡道上驻车时夹紧时间:电压大于 12.6V 时,夹紧时间< 1s ;电压小于 12.6V ,夹紧时间< 1.5s 。
释放反应时间:一般情况, EPB 释放时间< 1.6s 。
EPB 最小夹紧力要求
EPB 卡钳夹紧力满足法规及制动性能要求。
动态驻车稳定性
空满载车辆在以下情况下必须具备稳定的动态驻车性能:
1 . 30~100km/h 的动态驻车;
2 . 在 .65 - .75 PFC 潮湿路面的动态驻车;
3 . 空满载;
4 . 环境温度 0~40 ℃;
要求
1 . 在一条直线上完全停止,且偏离不得超过 3.5m ;
2 . 不控制方向盘的基础上,车身偏离角度不得超过± 30° 。
制动优先
一旦动态驻车启动,整车将不再响应加速信号。
开关位置
EPB 开关的位置必须同时考虑行车安全和人机要求。
EPB 开关特性
EPB 开关必须有以下特性:
1 . 图标必须是 ISO 标记P;
2 . 开关上下活动顺畅,不得卡滞在中间位置;
3 . 按下开关的时候就会传出释放的信号,拉起开关的时候就会传出加紧的信号;
4 . 按键边缘必须有最小 1mm 的倒角;
5 . 开关图标在晚上必须是明亮可见的;
6 . 开关的结构设计能够防止该区域溅落的液体渗入。
02 . EPB功能规范
EPB系统会有哪些功能,包括静态手动 夹紧 、静态手动释放 、熄火自动驻车 、 P 档 Lock 、自动释放 、高温再夹 、溜坡再夹 、动态紧急制动 、后轮防抱死制动 、 Last-win 策略 、洗车 & 拖车模式 、儿童锁等,下面来以几个功能为示例介绍。
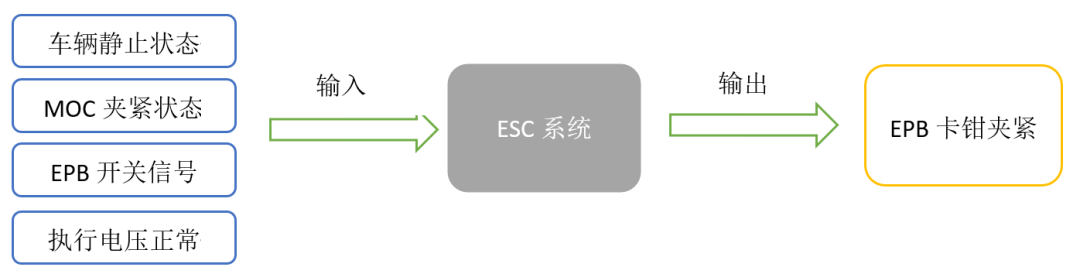
静态手动夹紧功能 静态手动夹紧功能是通过手动拉起 EPB 开关,系统接收到 EPB 开关拉起信号后执行卡钳夹紧命令。功能框图如下。
整个控制过程如下 :
卡钳状态判断:卡钳处于释放状态;
车辆状态判断:静止(车速小于 5km/h );
电压状态判断:工作电压正常( 9V~16V );
EPB 开关状态:拉起 EPB 开关持续 100ms 以上;
EPB 控制左右卡钳电机动作直到设定值时停止;
EPB 夹紧过程中 ESC 发送EPB正在加紧状态 信号 , 此时仪表依据此信号按 2HZ 频率闪烁;
系统检测到卡钳达到预定的夹紧力时,卡钳停止工作并保持锁止状态,此时 ESC 发送完成加紧状态 信号;
夹紧完成后, ESC 硬线驱动 EPB 开关工作指示灯点亮, ICM 依据 ESC 发送的 完成加紧状态 信号,点亮仪表驻车状态灯 ,仪表灯 驻车状态灯 随屏幕熄灭;若在 IGN OFF 状态下驻车或驻车后切换至 IGN OFF , ESC 驱动 EPB 开关工作指示灯亮 30s 后熄灭;在车辆重新上电后( IGN ON ) ICM 和 ESC 根 据 ESC 发出的卡钳锁止状态点亮仪表 驻车状态灯 和 EPB 开关工作指示灯;
若夹紧过程中突然断电,导致驻车失败,在重新上电后,仪表点亮仪表黄色 EPB 故障灯 ,当手动操作 EPB 开关进行夹紧 / 释放后(无其它 EPB 故障)系统恢复正常,仪表 EPB 故障灯熄灭。
EPB 卡钳夹紧过程中无法达到夹紧电流时,超过2.5s 将发出 EPB 系统故障信号,仪表 指示灯点亮,卡钳继续加紧不超过 20s 。
静态手动释放功能
静态手动释放 的功能定义是通过手动按下 EPB 开关,系统接收到 EPB 开关释放信号后执行卡钳释放命令, 功能框图如下。
控制过程
卡钳状态判断:卡钳处于夹紧状态;
车辆状态判断:静止(车速小于 5km/h ),且 IGN 处于非 OFF 状态;
电压状态判断:工作电压正常( 9V~16V );
EPB 开关状态: EPB 开关释放信号持续 100ms 以上;
制动状态判断:若此次驾驶员未踩制动踏板 , ICM 收到信号后,在仪表提示文字 " 请踩下制动踏板 " ;
EPB 释放过程中 ESC 向 CAN 上发送 EPB正在释放状态 信号 , 此时仪表指示灯 按 2HZ 频率闪烁;
EPB 控制左右卡钳电机动作直到退回至设定的空转行程值;
释放完成后 ESC 发送完成释放 信号,此时仪表指示灯 熄灭, EPB 开关工作指示灯熄灭;
EPB 卡钳释放过程中无法达到空转电流时,超过 2.5 秒,将发送 EPB 系统故障信号,仪表指示灯 点亮;持续执行释放动作几 秒。
熄火自动驻车功能
熄火自动驻车功能 定义的指车辆静止时 , 关闭点火开关后 ,EPB 自动夹紧驻车。其功能框图如下。
控制过程
卡钳状态判断:卡钳处于释放状态;
车辆状态判断:静止(车速小于 5km/h );
电压状态判断:工作电压正常( 9V~16V );
EPB 开关状态:未对 EPB 开关进行任何操作,处于自然状态;
点火开关状态判断:点火开关切换至 "OFF" 档;
EPB 控制左右卡钳电机动作直到设定夹紧力(夹紧力策略见“静态手动驻车”);
下电状态,仪表熄灭无指示灯提示, ESC 点亮 EPB 开关工作灯且在 ING OFF30s 后熄灭。
P 档联动
档联动 功能定义是车辆静止时 , 挂 P 档时 ,EPB 自动夹紧驻车。其功能框图如下。
控制过程
卡钳状态判断:卡钳处于释放状态;
车辆状态判断:静止(车速小于 5km/h );
电压状态判断:工作电压正常( 9V~16V );
EPB 开关状态:未对 EPB 开关进行任何操作;
档位状态判断:档位处于 P 档,EPB 控制左右卡钳电机动作直到设定夹紧力;
EPB 夹紧过程中 ESC 向 CAN 上发送 EPB 夹紧状态信号 , 此时仪表指示灯 按 2HZ 频率闪烁;
卡钳到达设 计的驻车力后 ESC 向 CAN 上发送 EPB 夹紧完成信号,此时仪表指示灯点亮, EPB 工作指示灯点亮。
自动释放
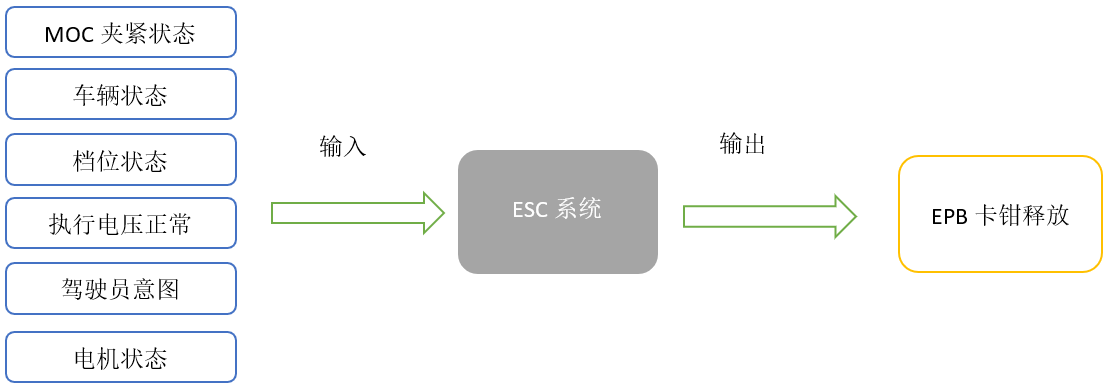
自动释放功能定义是指通过检测加速踏板 , 电机转速 , 电机扭矩 , 档位 , 坡度等信号,判断驾驶员的驾驶意图,释放 EPB 辅助车辆驶离,其功能框图如下。
控制过程
卡钳状态判断:卡钳处于夹紧状态;
车辆状态判断:车辆静止(车速小于 5km/h )、主驾门关闭、主驾安全带系上;
电压状态判断:工作电压正常( 9V~16V );
EPB 开关状态:未对 EPB 开关进行任何操作,处于自然状态;
档位状态判断:车辆档位处于能驱动状态;
驾驶意图判断:加速踏板信号有效;
路面情况判断:根据 坡度等级角 信号 计算车辆所在坡度及驱动车辆所需的最小扭矩;
驱动力矩达到起步条件时,释放 EPB 卡钳并发送信号 ,仪表收到此后指示灯 按 2HZ 频率闪烁;
卡钳释放彻底后,EPB发送释放 信号,仪表指示灯 熄灭, EPB 开关工作指示灯熄灭。
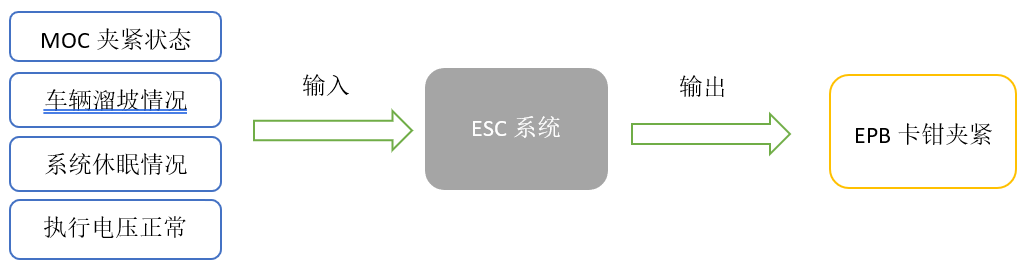
溜坡再夹
溜坡再夹 功能定义是通过检测轮速信号确定车辆发生溜坡后, EPB 以最大夹紧力实施再夹 ,其功能框图如下。
控制过程
卡钳状态判断:卡钳处于夹紧状态;
车辆溜坡状态检测:利用轮速脉冲信号 确认车辆是否出现溜坡;
电压状态判断:工作电压正常( 9V~16V );
EPB 开关状态:未对 EPB 开关进行任何操作,处于自然状态;
当 ESC 系统 检测 到后轮中任一轮速出现 3 个脉冲信号后,按最大夹紧力执 行 2 次溜坡再夹功 能;
EPB 夹紧过程中 ESC 向 CAN 上发送 EPB 夹紧状态信号 , 此时仪表指示灯 按 2HZ 频率闪烁;
卡钳到达设计的制动力时 ESC 向 CAN 上发送完成加紧 信号,此时仪表指示灯 点亮;
若在 ING OFF 的时候执行溜坡再夹时,仪表不会点亮 ;
溜坡再夹功能最长支持 ING OFF 后 30min ,其后整车系统休眠将不能监控车辆状态。
后轮防抱死制动
后轮防抱死制动 功能定义是若 ESC 系统功能降级( ABS 或 EBD 功能故障),在车辆行驶过程中持续拉起 EPB 开关, EPB 控制后轮卡钳进行防抱死紧急制动,其功能框图如下。
控制过程
卡钳状态判断:卡钳处于释放状态
车辆状态判断:行驶状态(车速≥ 5km );
ESC 状态判断: ESC 系统功能降级,仪表点亮故障灯;
电压状态判断:工作电压正常( 9V~16V );
EPB 开关状态: EPB 开关拉起信号一直处于拉起状态
左右后轮速信号均有效时,系统执行后卡钳夹紧的防抱死动态紧急制动 ( 在良好路面上制动减速度≥ 0.25g) ,后轮速信号有任一个失效或两个前轮同时失效时,系统执行后卡钳固定的夹紧力动态紧急制动 ( 在良好路面上制动减速度≥ 0.15g) ;
紧急制动过程中持续点亮刹车尾灯,车辆停止后进行 EPB 机械驻车;EPB 夹紧过程中 ESC 向 CAN 上发送夹紧信号, 此时仪表指示灯 按 2HZ 频率闪烁;
卡钳到达设计的驻车力后 ESC 向 CAN 上发送完成夹紧 信号,此时仪表指示灯 点亮, EPB 开关工作指示灯点亮。
| 






 订阅
订阅