| 编辑推荐: |
本文基于AUTOSAR CP R24-11版本中底盘域应用接口的详细规范,深入解析底盘域各软件组件的功能定义与接口设计,为汽车电子工程师提供全面的技术参考。希望对您的学习有所帮助。
本文来自于微信公众号嵌入式学新社,由火龙果软件Alice编辑、推荐。
|
|
“ AUTOSAR(汽车开放系统架构)作为汽车电子领域的行业标准,在底盘控制系统的标准化过程中发挥着关键作用。本文基于AUTOSAR
CP R24-11版本中底盘域应用接口的详细规范,深入解析底盘域各软件组件的功能定义与接口设计,为汽车电子工程师提供全面的技术参考。”
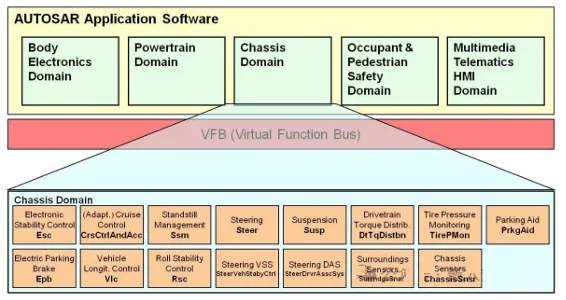
01 底盘域基础概念与架构
1.1 坐标系系统定义
底盘域采用ISO 8855标准定义的坐标系系统,以前轴中心为坐标原点。X轴指向车辆前进方向,Y轴指向车辆左侧,Z轴指向车辆顶部。这种标准化的坐标系为各底盘控制系统提供了统一的参考基准,确保了系统间数据交换的一致性。
1.2 接口设计优化方法论
在接口定义过程中,AUTOSAR明确了关键术语的标准化使用:
状态(State):系统或实体的当前状态
模式(Mode):工作模式,如舒适模式或运动模式
目标(Target):自动控制系统的设定值
请求(Request):控制器的目标值默认表述
这种术语标准化有效解决了不同供应商之间接口定义的歧义问题。
02 核心软件组件详解
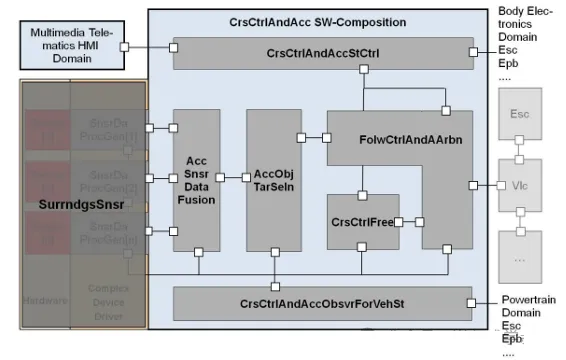
2.1 巡航控制与自适应巡航(CrsCtrlAndAcc)
该软件组合负责控制车辆速度及与前车距离,包含多个子组件:
传感器数据融合(AccSnsrDataFusion):整合多个环境传感器数据
目标对象选择(AccObjTarSeln):选择ACC相关目标对象
自由巡航控制(CrsCtrlFree):根据设定速度计算目标加速度
跟随控制与仲裁(FolwCtrlAndArbn):计算跟车加速度并仲裁控制指令
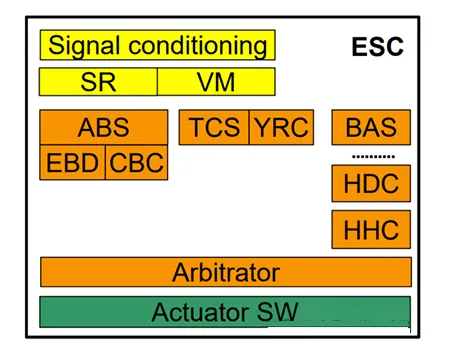
2.2 电子稳定性控制(Esc)
Esc组件是底盘域的核心安全组件,集成多种子功能:
防抱死系统(ABS)
牵引力控制系统(TCS)
电子制动力分配(EBD)
横摆率控制(YRC)
车辆模型(VM)和情景识别(SR)
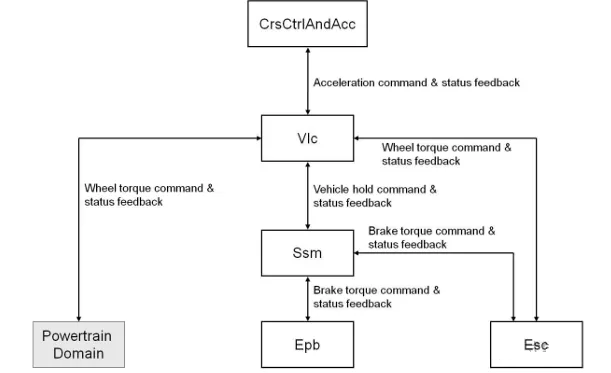
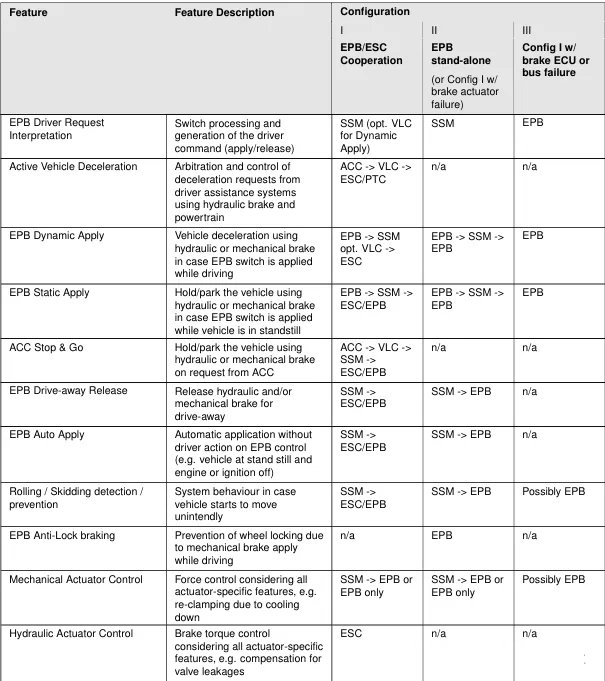
2.3 电子驻车制动(Epb)
Epb组件支持三种市场实现方案:
独立EPB系统
EPB主控-ESC从动模式
ESC主控-EPB从动模式
AUTOSAR的接口定义全面支持这三种配置,确保了系统的灵活性。
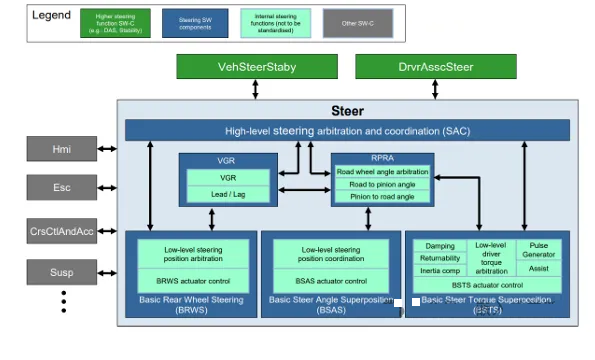
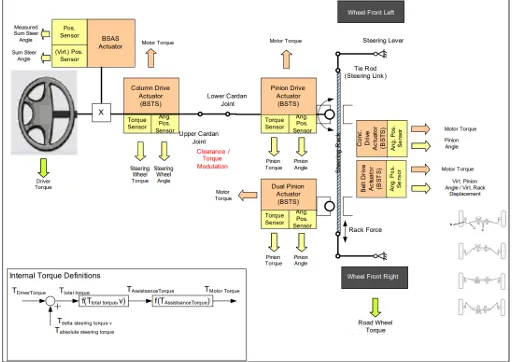
03 转向系统架构
3.1 基础转向功能
转向系统软件组件(Steer)提供三大核心功能:
基础转向扭矩叠加(BSTS):提供助力扭矩或扭矩叠加功能
基础转向角度叠加(BSAS):实现可变传动比和超前滞后补偿
后轮转向(BRWS):生成后轮转向角度
3.2 高级转向功能
转向驾驶员辅助系统(SteerDrvrAsscSys):实现车道保持、停车辅助等高级功能
转向车辆稳定控制(SteerVehStabyCtrl):通过主动转向执行器改善车辆稳定性
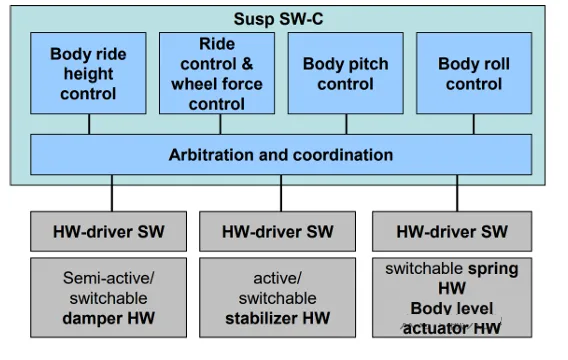
04 底盘传感器系统
4.1 内部状态传感器
按照信号处理级别分为:
原始信号:未经预处理的传感器数据
基础信号:经过预处理的传感器数据
标准信号:基于AUTOSAR规范推导的信号
融合信号:多个传感器信号处理后的结果
4.2 环境传感器(SurrndgsSnsr)
提供周围交通参与者和静止物体的相关信息,支持:
传感器信号处理
传感器硬件监控
目标跟踪和聚类
对象属性确定和分类
05 系统集成与交互
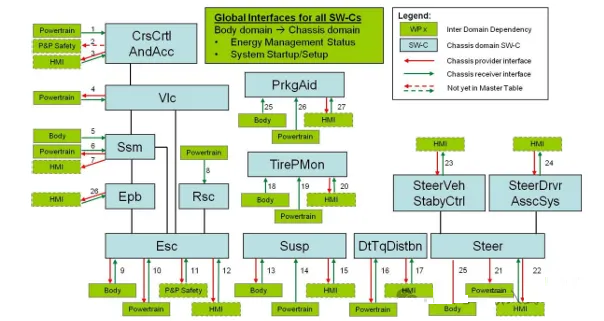
5.1 跨域依赖关系
底盘域与其他应用域存在紧密的交互关系:
与动力总成域的扭矩管理交互
与车身域的车门、车窗状态交互
与人机界面域的显示和控制交互
与 occupant安全域的环境信息交互
5.2 虚拟功能总线(VFB)
AUTOSAR通过虚拟功能总线实现软件组件间通信的抽象,确保应用接口定义与物理实现无关,提高了软件的可移植性和可维护性。
06 结语
AUTOSAR底盘域应用接口标准的建立,为汽车底盘控制系统的开发提供了完整的解决方案。通过标准化的软件组件定义和接口规范,实现了不同供应商组件间的无缝集成,大大提高了开发效率和系统可靠性。随着汽车电子架构的不断演进,AUTOSAR标准将继续在底盘控制系统的发展中发挥关键作用。 | 






 订阅
订阅