| 编辑推荐: |
本文首先介绍了AUTOSAR的相关背景知识,随后在项目中,研究人员利用AUTOSAR将来自网络的实时数据在LED面板上进行可视化展示。在该项目中,研究人员制作了一个物理可视化面板,并在集成软件开发环境Arctic Studio及其工具中编写了相关代码,希望对您的学习有所帮助。
本文来自于微信公众号猿力部落,由火龙果软件Alice编辑、推荐。 |
|
如今,道路上的汽车数量比以往任何时候都多,汽车行业正不断发展和调整,以满足新技术的需求。为了更好地进行复杂性管理、缩短工程时间并降低成本,汽车开放系统架构(AUTOSAR)应运而生,其目标是实现电子控制单元(ECU)的标准化。
目前,AUTOSAR标准已应用于汽车行业,本文旨在研究该标准是否可用于与汽车行业无直接关联的领域。
01. 简介
1.1 项目
ARCCORE希望研究经典AUTOSAR(Classic AUTOSAR)是否可用于以可视化方式展示来自网络的数据或传感器数据。在本项目中,从上述任一类型数据源收集到的信息,将以字母和/或数字的形式显示在一组LED灯条上,并根据输入数据进行相应调整。这一任务由电子控制单元(ECU)完成,ECU负责处理输入数据,并对数据进行转换,以便在LED上显示。输入数据可通过相应的API从个人计算机(PC)、互联网或传感器收集,随后通过CAN连接直接传输至ECU。
1.2 目的
AUTOSAR由一群对汽车领域感兴趣的合作伙伴联合设计开发,其主要创建目的是为汽车行业建立一个开放且标准化的软件架构。本文的目的是研究AUTOSAR在汽车行业之外的领域应用效果如何。
1.2.1 研究问题
本项目重点围绕以下两个研究问题展开:
· 在与汽车行业无直接关联的设备上,是否能够实施AUTOSAR标准?
· 在与汽车行业无直接关联的系统中,AUTOSAR的运行表现如何?
1.2.2 范围界定
本项目原本可进一步扩展为采用自适应AUTOSAR(Adaptive AUTOSAR)的信息娱乐显示屏。信息娱乐系统可通过提供实时数据,帮助消费者了解车辆的各项功能,还可提供如今智能手机上常见的高端功能。然而,采用自适应AUTOSAR实现这一目标需要大量时间,因此可在未来无时间限制的情况下进一步开发。基于此,本项目将范围限定为仅使用经典AUTOSAR(Classic AUTOSAR)。
1.3 需求
本项目最初的计划是利用传感器读取物理运动部件的输入数据,例如设计一个用于统计道路车辆数量的系统,然后在LED面板上显示相关信息。由于传感器相关功能仅为一个可在时间充裕时实现的想法,因此被列为最低优先级需求。
1.3.1 需求清单
需求清单中的需求按优先级分为不同级别,其中高优先级需求是项目执行期间必须完成的内容。
· 高优先级:绿色
· 中优先级:橙色
· 低优先级:红色
具体需求如下:
· ECU必须按照AUTOSAR标准进行编程。
· ECU必须能够无故障、无崩溃地运行。
· 系统应易于根据所需采集的数据类型进行调整。
· 具备一个静态数据集,该数据集可由ECU轻松转换为可视化数据。
· LED需根据输入数据进行更新。
· ECU可通过CAN总线从PC接收实时数据集。
· ECU必须通过以太网电缆接收实时数据集。
· 通过ECU上的数字输入/输出(Digital I/O)控制LED。
· 使用物理运动部件(如传感器)来模拟实时数据集。
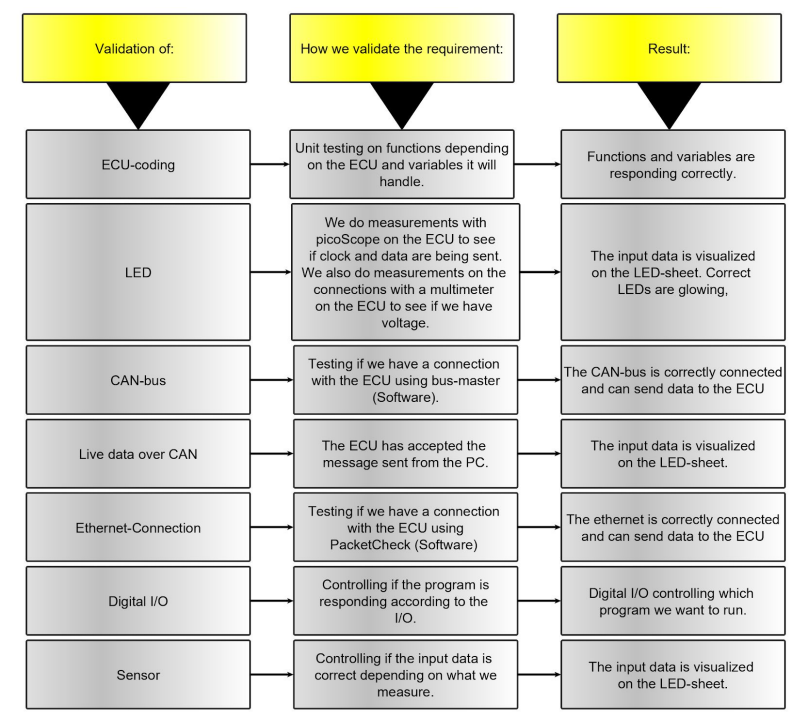
各项需求的验证方式如图1.3.1.1所示,该图表还展示了验证的先后顺序。ECU编码验证应作为一个过程,贯穿整个项目始终。
图1.3.1.1:展示各项需求的验证方式。“验证对象”列指明需验证的部分;“验证方法”列说明验证的实施方式;“预期结果”列描述验证应达到的预期效果
1.4 工作分配
本项目采用 极限编程 (XP)方法,核心是两人一组进行编程工作,大部分任务都需以小组形式完成。不过,也存在部分分工情况,例如一人在焊接工位处理LED焊接工作时,另一人负责撰写报告。由于项目中的大部分任务都需要两人共同讨论确定实施方式,因此我们决定不进行过多的任务拆分。
总体而言,工作分配相对均衡。如果某一天一人主要负责编程,另一人负责查看代码编写并提出意见,那么第二天两人会互换角色,由前一天查看代码的人负责编程,前一天编程的人负责查看代码并提出意见。
02. AUTOSAR及相关组件
本章将介绍AUTOSAR的定义,阐释AUTOSAR的基础架构、电子控制单元(ECU),最后说明CAN通信帧的相关知识。
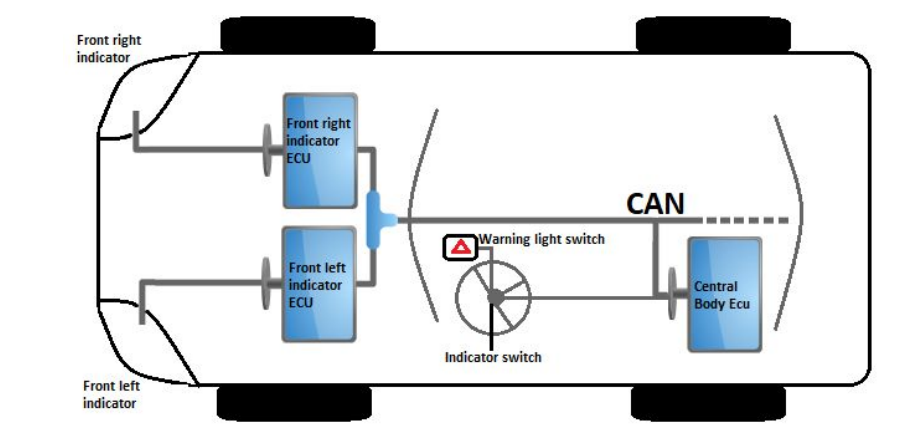
ECU和CAN是汽车行业中用于执行特定任务和实现通信的典型组件,如图2.1所示,本项目同样使用了这些组件。
图2.1:汽车俯视示意图,展示了汽车内部采用ECU和CAN总线的结构示例,包含右前指示灯、左前指示灯、警示灯开关、指示灯开关、左前指示灯ECU、中央车身ECU等部件
2.1 AUTOSAR定义
AUTOSAR是汽车行业内的一项标准化技术。2002年8月,宝马(BMW)、博世( Bosch )、大陆集团(Continental)、 戴姆勒-克莱斯勒 (Daimler Chrysler)、大众(Volkswagen)联合成立了启动团队,并展开初步讨论,不久后西门子威迪欧(Siemens VDO)也加入其中。
如今,AUTOSAR的核心合作伙伴包括宝马集团(BMW Group)、博世(Bosch)、大陆集团( Continental )、戴姆勒(Daimler)、福特(Ford)、通用汽车(General Motors)、标致雪铁龙集团(PSA Group)、丰田(Toyota)、大众集团(Volkswagen Group)。
该标准规定了电子控制单元(ECU)软件的参考架构。
2.2 ECU定义
如今的现代汽车对电子控制的依赖程度越来越高,电子组件被集成到模块中,这些模块在电气、机械和化学环境方面都有特定要求。早在20世纪70年代,电子控制技术就已进入汽车行业。
高端汽车中ECU的数量正不断增加,如今部分汽车配备的ECU数量已多达120个,在某些情况下甚至更多。
2.2.1 ECU功能
汽车行业的发展日新月异,ECU的数量也随着汽车技术的发展而不断增加。对于自动驾驶模式而言,汽车需要具备多种功能,电子控制单元(ECU)便是其中之一。
大量ECU的应用会导致通信开销增加,这种通信开销主要体现为局域网内的消息交互,而网络中的所有节点均充当认证服务器的角色 。
ECU用于从各类传感器收集数据,并控制汽车的多种功能,包括动力传动系统、娱乐系统、制动系统、动力转向系统和照明系统等。为确保系统正常运行,需使用不同的总线网络,其CAN总线和 FlexRay总线 对于高速网络至关重要。此外,还需要网关ECU实现不同总线之间的数据读写及协议转换。
2.2.2 工作流程
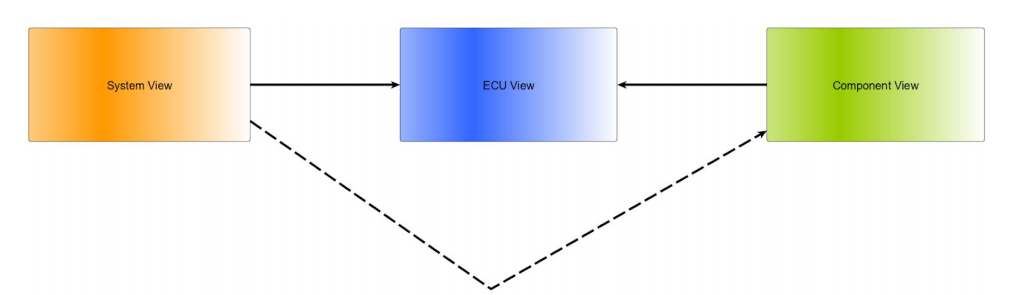
AUTOSAR方法学(如图2.4.1所示)详细说明了如何为ECU生成可执行代码,其工作产品流程以XML文件形式存储。该方法学包含系统视图(System View)、ECU视图(ECU View)和组件视图(Component View)三个部分。
图2.4.1:AUTOSAR方法学示意图,展示了系统视图、ECU视图与组件视图之间的关联关系
简单来说,系统视图包含软件组件的相关描述,同时会在此视图中完成配置,并将配置好的组件分配给特定的ECU。
在ECU视图中,通过对目标文件进行链接,生成可执行程序。本质上,ECU视图中的配置工作是指选择并配置基础软件(Basic Software)的模块,这些模块是实现任务调度器配置与功能所必需的。
组件视图为ECU视图提供目标文件(以二进制代码形式存在),并借助其组件相关模板,协助ECU视图生成可执行程序。
2.3 AUTOSAR背景
AUTOSAR旨在通过提高软件模块的可复用性和可交换性,优化复杂性管理,同时实现ECU软件架构的标准化。
如今的ECU承担着增强机电系统功能的作用。控制软件通常是针对目标车辆设计和开发的,在车辆的使用寿命内基本不会发生根本性变更。
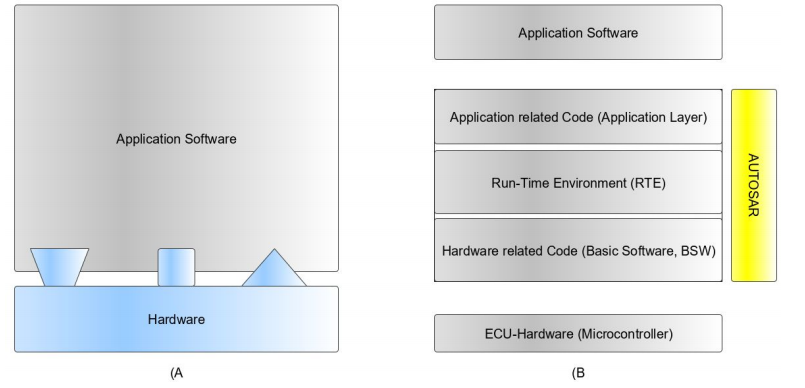
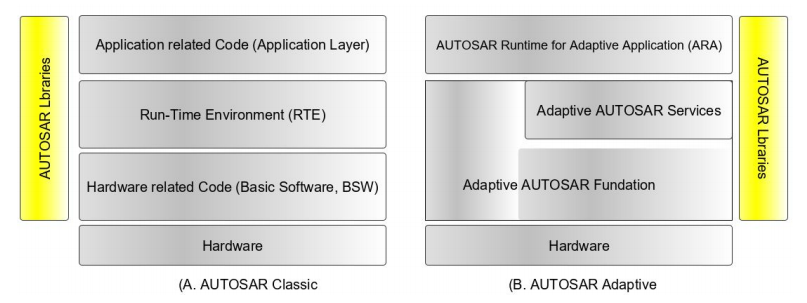
在AUTOSAR标准出现之前,软件与硬件之间存在高度依赖关系,这种依赖关系可通过图2.5.1进行说明。
图2.5.1:在图(A)中,硬件和软件相互依赖,在图(B)中,AUTOSAR标准层不依赖于硬件
AUTOSAR架构为ECU软件设置了多个抽象层,即AUTOSAR分层软件架构,具体包括应用相关代码(应用层,Application Layer)、运行时环境(Run-Time Environment,RTE)、硬件相关代码(基础软件,Basic Software,BSW)以及 ECU 硬件(微控制器,Microcontroller)。
AUTOSAR的目的在于实现软硬件解耦,缩短开发时间并降低成本,同时通过软件复用提升质量与效率。
2.3.1 AUTOSAR标准
AUTOSAR包含两个标准化软件平台 —— 经典平台(Classic)和自适应平台(Adaptive),如图2.6.1所示。本项目将重点聚焦经典AUTOSAR。
图2.6.1:图(A)为经典 AUTOSAR(AUTOSAR Classic)及其分层结构;图(B)为自适应 AUTOSAR(AUTOSAR Adaptive)及其分层结构
2.3.1.1 经典平台
经典平台的技术特点如下:
· 基于OSEK标准(汽车电子开放式系统及其接口标准)。
· 代码直接从只读存储器(ROM)中执行。
· 所有应用程序共享同一地址空间(支持内存保护单元MPU,以保障安全性)。
· 针对基于信号的通信(如CAN、FlexRay)进行优化。
· 任务配置固定。
· 仅包含规范定义。
2.3.1.2 自适应平台
自适应平台的技术特点如下:
· 基于POSIX(可移植操作系统接口)标准。
· 应用程序从持久化内存加载到随机存取存储器(RAM)中运行。
· 每个应用程序拥有独立的(虚拟)地址空间(支持内存管理单元MMU)。
· 支持基于服务的通信。
· 支持多种(动态)调度策略。
· 同时包含规范定义与代码实现。
2.4 软件组件
软件组件(SWC)是模型中的最小组件单元,由端口(Ports)、内部行为(Internal Behavior)和功能实现(Functional Implementations)构成。这些组件可存在于应用层(Application Layer)、运行时环境层(RTE Layer)和基础软件层(BSW Layer)中。
端口用于实现一个软件组件与另一个软件组件的连接,同时也用于在不同软件组件之间或软件组件与RTE之间传输数据。软件组件上的基本端口类型包括提供者端口(PPort,Provider Port)、需求者端口(RPort,Require Port)以及提供者-需求者端口(PRPort,Provide Require Port)。
软件组件的功能实现被称为可运行实体(Runnable)。一个软件组件通常包含一个或多个可运行实体,每个可运行实体内部都包含一系列指令序列。可运行实体的形式与普通函数类似,其作用是描述软件组件的行为。软件组件代码可用于实现完整的应用程序,也可用于实现应用程序的一部分功能。
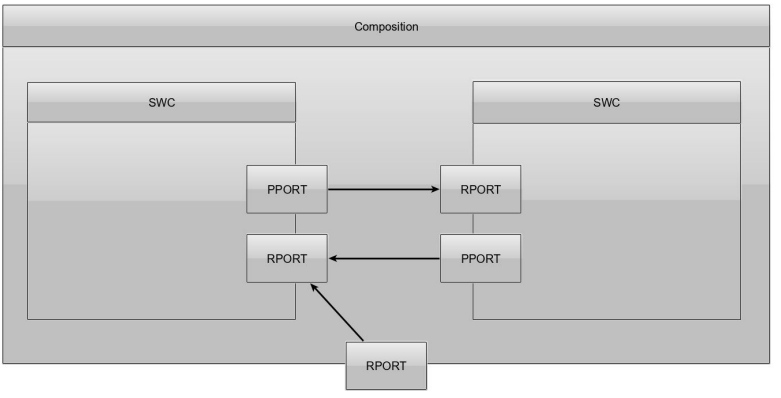
AUTOSAR包含多种类型的软件组件,本项目仅使用组合软件组件(Composition SWC)和软件组件连接器(SWC Connectors)。
组合软件组件(Composition)用于封装一个或多个软件组件(SWC)。与普通软件组件类似,组合软件组件也可拥有端口,用于接收和/或发送信息。外部连接通常通过组合软件组件的端口接入,再传递至组合内部的软件组件;连接器(Connectors)则用于表示两个软件组件的端口之间的连接关系。图 2.8.1 展示了组合软件组件与连接器的连接方式。
图2.8.1:组合对象与软件组件连接示意图。图中包含一个组合组件,内部有两个软件组件(SWC),通过端口(PPORT、RPORT)和连接器实现连接)
其他类型的软件组件还包括应用软件组件(Application SWC)、传感器/执行器软件组件(Sensor/Actuators SWC)、参数软件组件(Parameter SWC)、服务代理软件组件(Service Proxy SWC)等。
2.5 AUTOSAR基础架构
如前所述,AUTOSAR架构为ECU软件设置了多个抽象层。
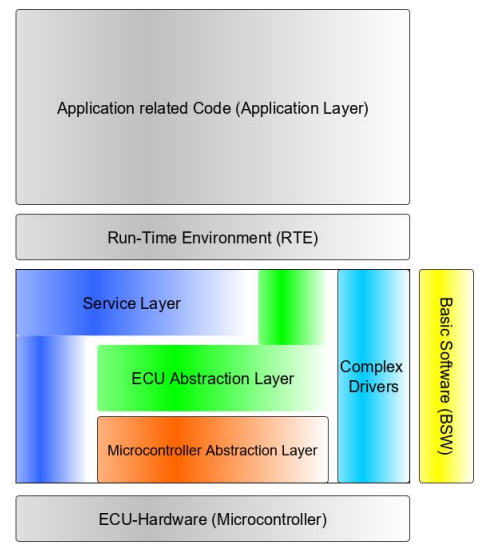
基础软件(BSW)层进一步细分为四个子层,分别是服务层(Services Layer)、ECU抽象层(ECU Abstraction Layer)、微控制器抽象层(Microcontroller Abstraction Layer)和复杂驱动层(Complex Drivers),如图2.9.1所示。
图2.9.1:AUTOSAR模型及BSW分层示意图
AUTOSAR的目标是实现硬件组件的抽象化。各层向上层提供功能支持,即微控制器为BSW层提供功能,BSW层为RTE层提供功能,以此类推。分层架构具有诸多优势,例如当某一层出现错误时,仅需修复该层即可,无需对所有层进行调整。
2.5.1 应用层
应用层由相互连接的原子级应用软件单元(即软件组件)构成。该层中的每个软件组件都封装了ECU所需的全部或部分汽车功能及行为。
2.5.2 运行时环境
在AUTOSAR架构中,运行时环境(RTE)的任务是提供服务和资源,实现不同软件组件之间的通信。RTE支持两种通信类型:一种是ECU内通信(Intra-ECU Communication),即映射到同一ECU上的软件组件之间的通信;另一种是ECU间通信(Inter-ECU Communication),该通信需借助CAN、LIN、FlexRay等总线实现。
RTE的核心作用是使软件组件独立于其所在的ECU。软件组件的依赖性仅体现在其所依附的应用程序上,这意味着RTE必须针对特定ECU进行适配。这种适配通过ECU专属的生成与配置实现,因此,不同ECU上的RTE存在差异。
2.5.3 基础软件
如前所述,基础软件(BSW)层包含四个子层,如图2.9.1所示。
服务层(Services Layer):
服务层为应用程序提供基础服务和基础软件模块,是BSW层的最上层。其提供的功能涵盖操作系统支持、车辆网络通信与管理、内存服务、诊断服务及ECU管理等。
ECU 抽象层(ECU Abstraction Layer):
ECU抽象层使上层软件与ECU硬件布局解耦。它与微控制器抽象层对接,为上层提供外设和设备的访问接口,同时提供用于与微控制器交互的应用程序编程接口(API)。
微控制器抽象层(Microcontroller Abstraction Layer):
微控制器抽象层可直接访问微控制器的片内外设模块和外部设备,同时使上层软件与微控制器硬件解耦。
复杂驱动层(Complex Drivers Layer):
复杂驱动层用于操控复杂的传感器和执行器,实现其功能并满足时序要求。该层可直接访问微控制器,实现硬件与RTE之间的连接。
2.6 控制器局域网
控制器局域网(CAN)由博世(BOSCH)公司开发,是一种多主站、消息广播式网络。CAN最初专为汽车行业设计和应用,但目前也广泛应用于航空、机器人等领域。
与以太网(Ethernet)或通用串行总线(USB)等传统网络(采用点对点方式传输大量数据块)不同,CAN网络会向整个网络广播多个短消息。CAN的优势之一是能够确保系统中每个节点的数据一致性。在ISO 11898标准中,CAN帧分为两种类型:标准CAN帧(Standard CAN)和扩展CAN帧(Extended CAN)。
2.6.1 标准CAN帧
图2.10.1所示的标准CAN帧包含以下位域:
· SOF(Start of Frame,帧起始位): 标记消息的开始,用于实现总线上各节点的同步。
· 11位标识符(11-bit Identifier): 定义消息的优先级,二进制数值越小,优先级越高。
· RTR(Remote Transmission Request,远程传输请求位): 当需要从其他节点获取信息时使用。
· IDE(Identifier Extension,标识符扩展位): 表示当前传输的是标准CAN帧,无标识符扩展。
· r0(保留位): 预留位,供未来可能的功能扩展使用。
· DLC(Data Length Code,数据长度码): 指示通过CAN总线传输的数据字节数。
· 数据域(Data): 最多可传输8字节的应用数据。
· CRC(Cyclic Redundancy Check,循环冗余校验位): 包含前序应用数据的校验和,用于错误检测。
· ACK(Acknowledges,确认位): 包含2位,其中显性位表示消息已无错误发送,另一位为界定符。
· EOF(End-of-Frame,帧结束位): 标记CAN消息的结束。
· IFS(Interframe Space,帧间间隔): 包含控制器将数据传输到目标缓冲区所需的时间。
图2.10.1.1:标准CAN帧结构示意图
2.6.2 扩展CAN帧
扩展CAN帧与标准CAN帧的结构基本一致,仅额外增加了三个位域,如图2.10.2.1所示。
图2.10.2.1:扩展CAN帧结构示意图
· SRR(Substitute Remote Request,替代远程请求位): 在标准CAN帧中 RTR位的位置占位,替代其功能。
· IDE(标识符扩展位): 该位为隐性位时,表示标识符位数扩展7位(即总标识符长度为29位)。
· r1(额外保留位): 扩展CAN帧中额外增加的一个预留位。
03. 系统架构
本章将介绍系统所包含的组件、各组件的功能的以及组件之间的通信方式。
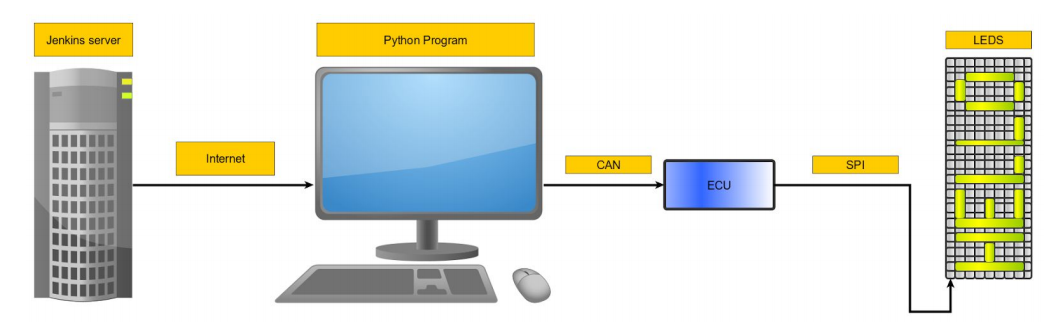
本项目使用的系统包含三个主要组件,如图3.1所示。第一个组件是输入数据源:本项目中的输入数据通过相应的API从互联网获取到个人计算机(PC)中;第二个组件是ECU:收集到的数据通过CAN总线传输至ECU,由ECU对输入数据进行处理后,将信息传递给第三个组件——LED;LED的任务是将接收到的信息以滚动字母和/或数字的形式显示出来。
图3.1:系统高层抽象示意图
04. 方法与工具
本章将介绍本项目/系统开发过程中所使用的方法、库、API、工具、硬件及软件。
4.1 方法
本项目主要采用极限编程(XP)方法,核心是两人一组协作开发,遵循40小时工作周、简化设计、测试驱动、重构优化、代码集体所有及编码标准统一等原则。办公室其他团队采用Scrum方法开展工作,本项目团队也参与了他们的每日站会。
选择极限编程方法的主要原因是:XP更侧重于实际编程实践,而Scrum更聚焦于项目管理与组织协调,二者针对不同领域,可形成互补。
4.2 编程语言与库
ECU编程采用C语言。为符合AUTOSAR标准,ECU被设计为一个软件组件(即“可运行实体”),其唯一功能是控制LED如何输出输入数据。ECU通过SPI总线向LED传输数据,这需要使用符合AUTOSAR标准的SPI库。同时,项目还使用了C语言的标准库,如string.h(字符串处理库)和stdlib.h(标准通用库)。
项目使用Python新版本(3.7.3)编写脚本,通过CAN通信将数据传输至ECU。其中,Kvaser Leaf Light v2作为连接器,实现PC与CAN总线的连接。该Kvaser连接器提供了一个Python CAN库接口(CANlib),支持数据的发送与接收。
4.3 工具
ARCCORE公司为项目提供了两台计算机,并预装了所有必需的软件。其中,Arctic Studio作为集成开发环境,用于开发和编译APA102型LED的控制程序;WinIDEA 软件用于将编译后的程序下载到 MPC5748G(ECU)中,并实现调试功能。
项目采用Git进行版本控制,所有源代码均存储在ARCCORE公司的Bitbucket 代码仓库中。
数据源与ECU之间的通信通过Kvaser Leaf Light v2实现,该设备是一种用于连接计算机与CAN总线的线缆。APA102型LED仅支持二线制SPI通信,项目中使用的SPI通信库由Arctic Core提供。
为将270个LED组成30×9的矩阵,项目使用Weller WHS 40焊接台完成LED的焊接(按设计阵型拼接),并焊接与ECU进行SPI通信所需的导线。
4.3.1 软件
4.3.1.1 Arctic Studio
Arctic Studio是由ARCCORE公司开发并维护的开源集成开发环境(IDE),符合AUTOSAR标准,基于Eclipse平台构建。借助Arctic Studio,客户可采用组件化开发方式,为汽车行业开发应用程序。
4.3.1.2 Arctic Core
Arctic Core是ARCCORE公司开发并维护的软件包,为汽车ECU提供通信服务、诊断服务和安全服务。该软件包基于AUTOSAR标准开发,支持软件复用。
4.3.1.3 WinIDEA
WinIDEA是一款用于将编译后的程序下载到微控制器中的软件工具,同时也可用于调试。
4.3.1.4 Git
Git是一款免费开源的版本控制系统,可用于管理从小型到大型的各类项目。
4.3.1.5 Jenkins
Jenkins是一款开源自动化服务器软件,支持包括Git在内的多种版本控制工具。
4.3.1.6 SPI
SPI(Serial Peripheral Interface,串行外设接口)主要用于嵌入式系统中的短距离通信。
4.3.2 硬件
4.3.2.1 MPC5748G
MPC5748G是恩智浦(NXP)公司生产的一款用于开发的微控制器,兼容以太网、USB、CAN和LIN等多种通信方式。
4.3.2.2 Kvaser Leaf Light v2
Kvaser Leaf Light HS v2是实现计算机与CAN总线网络连接的简便且低成本的设备之一。
4.3.2.3 APA102
APA102是DotStar公司生产的一款集成微控制器的RGB(红绿蓝)LED,采用通用二线制SPI协议进行通信。
4.3.2.4 Weller WHS 40
Weller WHS 40是一款主要用于爱好者焊接工作的焊接台。
05. 实施过程
本章将从技术层面阐述整个系统的实现方式,同时说明系统各部分的测试过程。
5.1 电子控制单元(ECU)
ECU的实现符合AUTOSAR标准,这意味着它被设计为一个软件组件,即“可运行实体”(Runnable)。本项目中使用的ECU仅承担一项任务——控制LED,因此该ECU仅包含一个可运行实体。
5.2 ECU与LED通过SPI通信
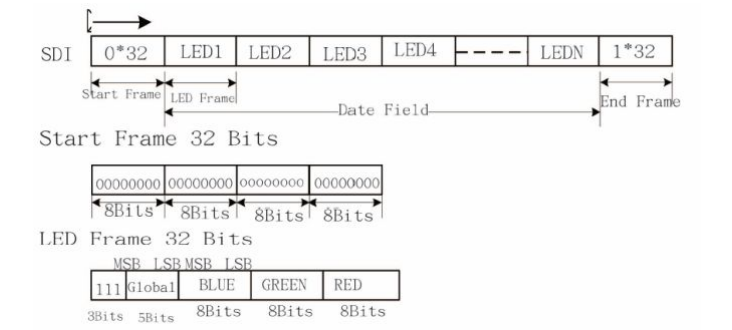
ECU的任务是处理输入数据,并对数据进行转换,使APA102型LED能够理解接收到的数据。APA102型LED支持二线制串行外设接口(SPI)通信,这两条总线可分别传输数据信号和时钟信号,时钟信号会定期读取数据信号。数据总线由多个帧组成,这些帧定义了单个LED的亮度和显示颜色。如图5.2.1所示,每个帧以32位为一个数据块。
图5.2.1:APA102型LED帧数据手册示意图
要向APA102型LED发送指令,需依次发送起始帧(Start Frame)、LED帧(LED Frame)和结束帧(End Frame),以下将对这三种帧进行详细说明。
5.2.1 起始帧
起始帧由32个二进制“0”组成,长度为32位,如其名称所示,用于标记一个数据帧的开始。
5.2.2 LED帧
LED帧用于指定LED的亮度和显示颜色。该帧的前3位必须始终为“1”;接下来的5位称为“全局位”(Global Bit),用于设置LED的亮度,取值范围为00000(最低亮度)至11111(最高亮度);最后24位用于定义颜色,采用BGR(蓝-绿-红)格式。
5.2.3 结束帧
结束帧由32个二进制“1”组成,用于标记一个数据帧的结束。
ECU会定期、持续地向LED传输数据帧,告知LED如何显示数据,这一过程借助AUTOSAR SPI库接口实现。
项目中使用两个函数来设置通信通道和传输数据,分别是SetupEB()函数和Spi_SyncTransmit()函数。
图5.2.2中的代码用于为SPI总线设置一个通道。其中,第一个参数为通道ID;第二个参数为数据缓冲区,是一个存储待传输数据的数组,该数据需按照上述APA102型LED帧的数据手册格式进行格式化;第三个参数为从APA102型LED读取数据的缓冲区,由于ECU仅向LED发送数据而不读取数据,因此该参数设为NULL;最后一个参数为待发送和/或接收数据的长度。
图5.2.2:为SPI总线设置通道的函数代码
图5.2.3中的函数用于通过SPI总线同步传输数据,传输的数据即为前一个函数中指定的SrcDataBufferPtr(源数据缓冲区指针)所指向的数据。
图5.2.3:向SPI总线同步传输数据的函数代码
5.3 ECU与LED通信测试
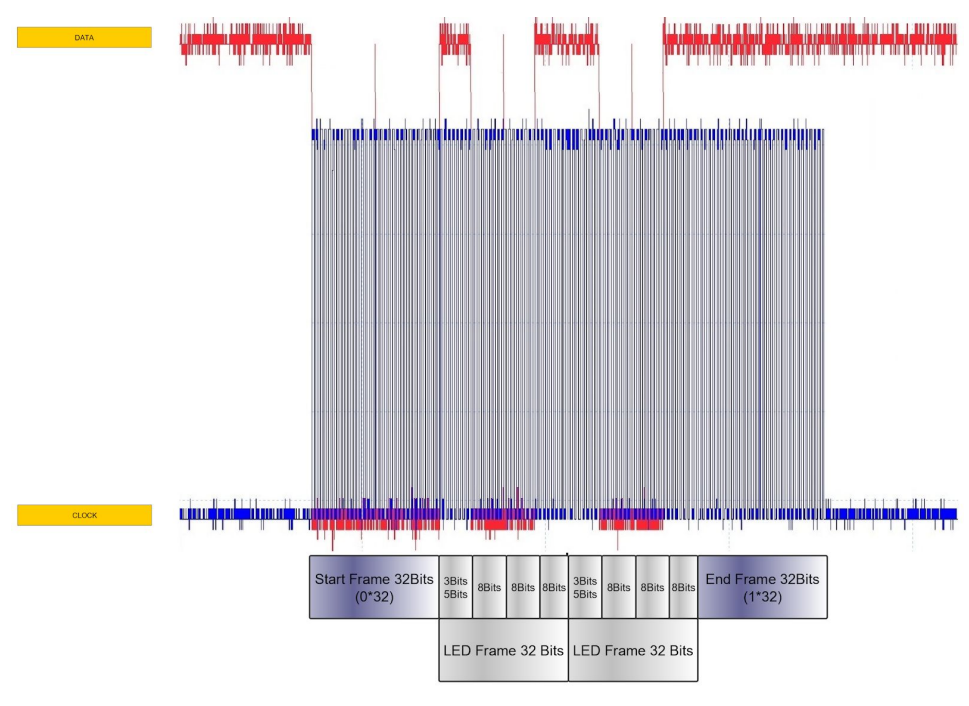
为验证硬件是否正常工作,项目使用PicoScope示波器(配合PicoScope 6软件)进行测量,如图5.2.4所示。测试过程中,向两个LED发送红色显示指令,同时测量时钟信号和数据信号。测量完成后,将PicoScope 6软件显示的可视化结果与APA102型LED帧数据手册进行对比,验证数值是否匹配。
图5.2.4:测量数据图表。红色信号为数据信号,蓝色信号为时钟信号,展示了向两个LED发送最低亮度红色显示指令时的信号情况,包含起始帧(32位)、两个LED帧(各32位)
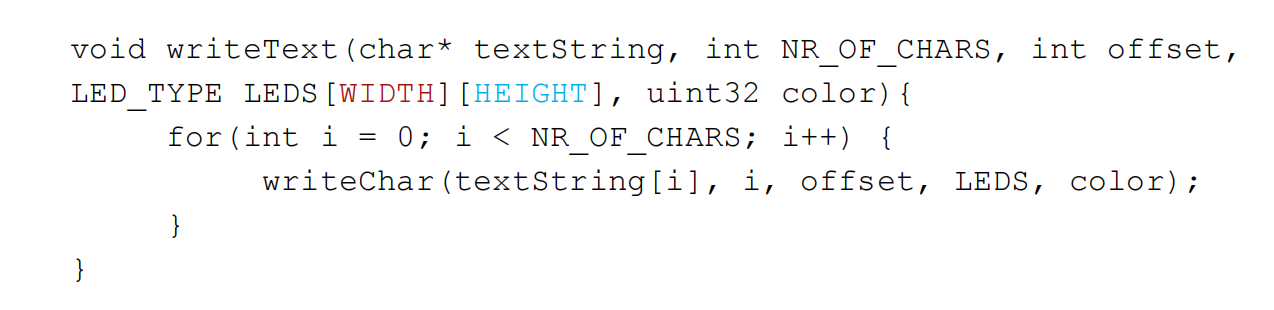
5.4 在LED上实现数据可视化
ECU以字母和/或数字的形式实现数据可视化。具体而言,项目将字母表中的所有字母和数字按照30×9的坐标系,逐LED进行硬编码,并存储在一个数组中。这种设计便于对输入字符串进行解码,并在LED上实现可视化显示。
图5.4.1:在LED上显示文本的函数代码
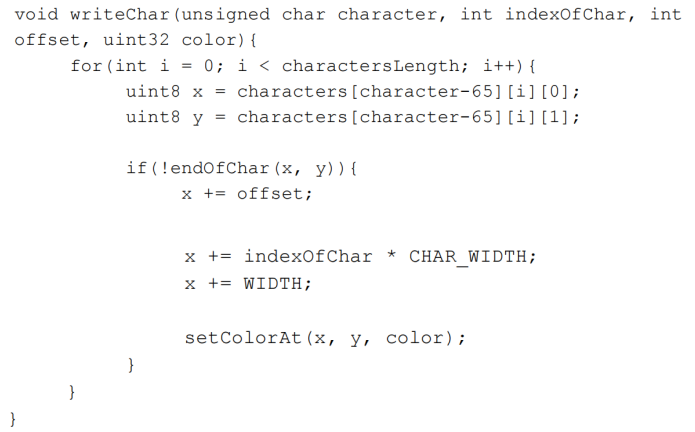
图5.4.2:在LED上显示单个字符的函数代码
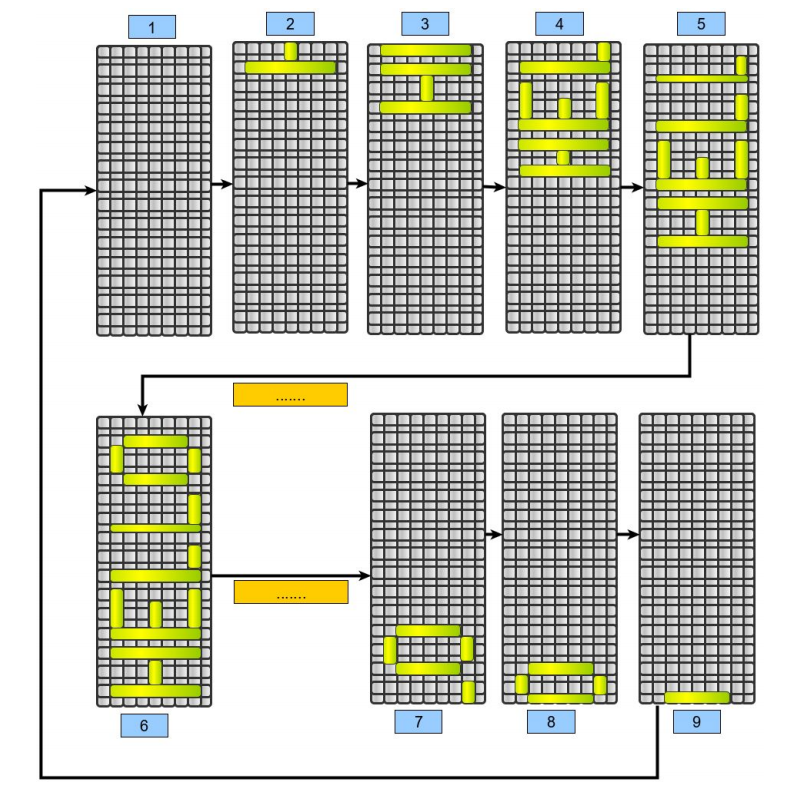
图5.4.3:LED面板数据可视化示意图。该图展示了文本滚动效果:从状态1开始,到状态9结束后,可视化数据会循环回到状态1,这意味着固定字符的偏移量会持续变化)
5.5 ECU与数据源/输入数据通过CAN通信
ECU通过CAN通信从输入数据源接收数据。为向ECU发送数据,项目借助CANlib库中的函数执行Python脚本:脚本首先从API获取待可视化的数据(具体数据类型可自定义),将其转换为ASCII码后发送至ECU。
项目中实现的一种输入数据源是从Jenkins(自动化服务器)获取构建和测试数据。这些数据来自ARCCORE公司自用的Jenkins服务器,员工的软件构建和测试记录均存储于此。项目通过Jenkins Python API获取特定时间段内成功的构建和测试次数。若要显示其他类型的数据,可采用类似流程,只需获取相应 API 的访问权限即可。例如,若需可视化某一地区的实时天气数据,可从互联网上获取各类天气API。
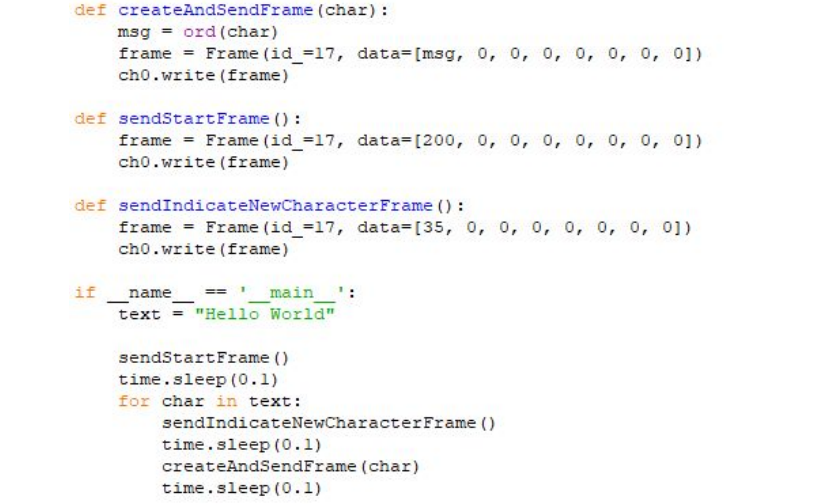
图5.5.1展示了将字符串“Hello World”通过CAN总线传输至ECU的部分代码。该字符串被拆分为单个字符,每个字符存储在一个8位的帧中(如createAndSendFrame()函数所示)。由于ECU会几乎同时接收到所有帧,可能导致无法区分各个ASCII码,因此在每个字符后会发送一个唯一字符,用于标记下一个字符即将传输。
图5.5.1:向ECU发送“Hello World”的脚本代码
5.6 CAN总线测试
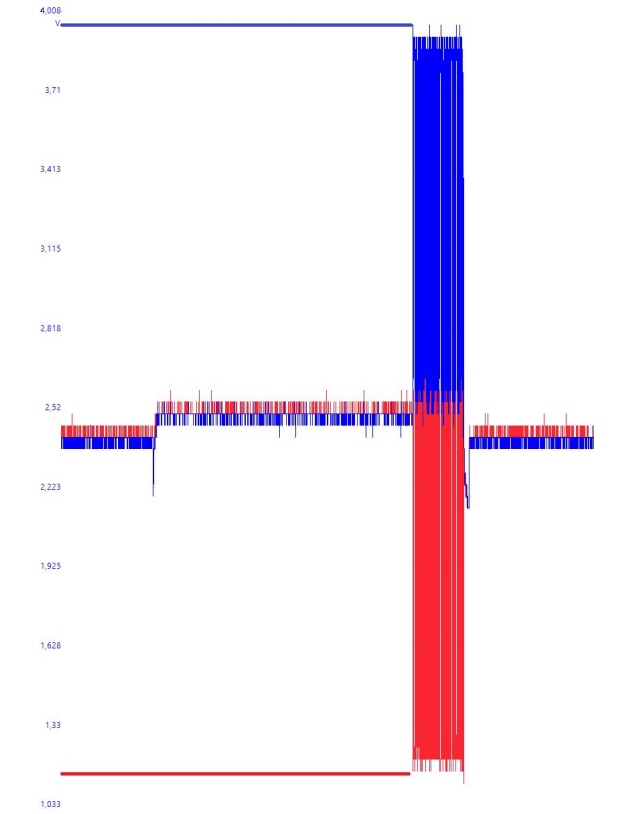
为验证CAN通信是否正常,项目使用PicoScope示波器进行测量。将所有硬件连接完成后,通过CAN总线发送300帧数据:CAN_H(CAN高电平线)的电压约为3.75V,CAN_L(CAN低电平线)的电压降至约1.2V;当两条线路的电压均达到约2.5V时,CAN总线处于空闲模式,表明此时无数据在总线上传输。
图5.6.1:使用PicoScope 6软件向ECU发送300帧数据时的测量结果图表,电压范围为1.033V-4.008V,包含CAN_H和CAN_L的电压变化曲线)
5.7 ECU程序测试
项目采用单元测试的方式对代码进行测试,即对独立的函数(作为短代码片段)进行测试。单元测试通常要求测试用例相互独立,选择对部分函数进行单元测试,是为了验证这些独立模块的正确性。
为实现测试用例,项目创建了“mock.h”文件。模拟对象(Mock Object)与复杂对象具有相同的接口,例如AUTOSAR中的SPI函数Spi_SyncTransmit(Spi_SequenceType Sequence)。
复杂对象在测试中往往难以使用,而模拟对象可通过自定义实现来满足测试中的控制需求。
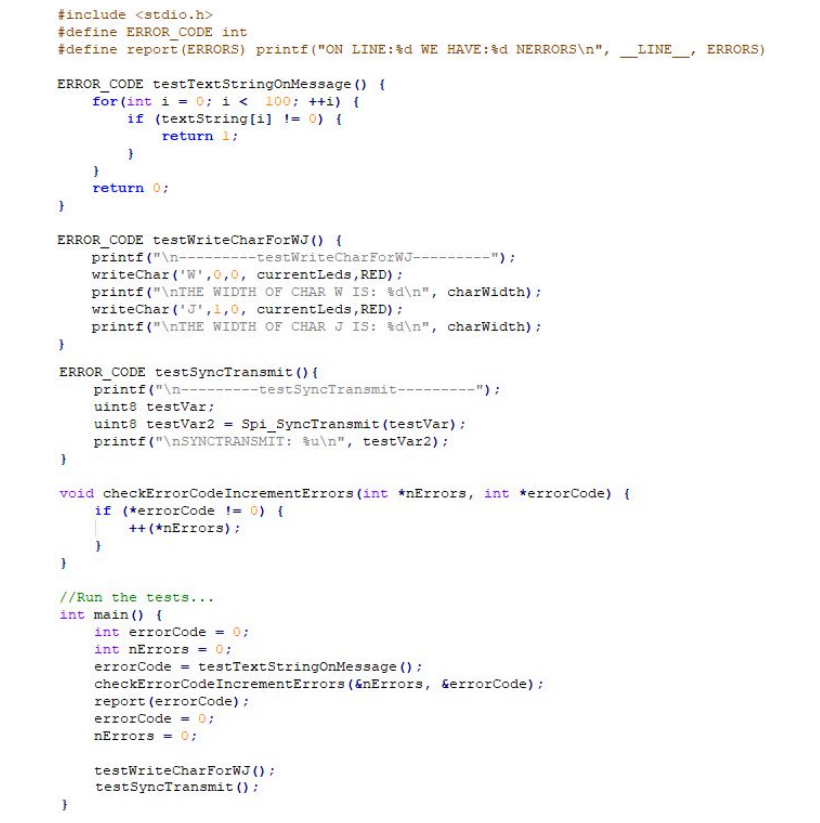
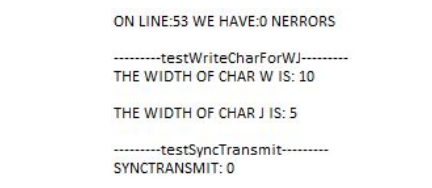
项目还创建了“test.h”文件,用于运行测试并打印函数运行结果(如图5.7.1所示);“mock.h” 文件则用于存储上述 “复杂” 函数(如图 5.7.2 所示)。测试在命令行(cmd)中执行,所有打印信息均在命令行中显示(如图 5.7.3 所示)。
图5.7.1:“test.h”文件代码示例,包含testTextStringOnMessage()、testWriteCharForWJ()、testSyncTransmit()、checkErrorCodeIncrementErrors()等函数。其中,testWriteCharForWJ()函数通过调用程序代码中的writeChar()函数,打印出LED面板显示字符“W”和“J”的宽度(分别为10和5);testSyncTransmit()函数用于测试数据传输功能是否符合预期)
图5.7.2:“mock.h”文件中的Spi_SyncTransmit()函数代码,该函数在“test.h”文件中调用,返回类型为uint8
图5.7.3:命令行打印结果示例,显示testWriteCharForWJ()和testSyncTransmit()函数的运行输出
06. 结果
6.1 技术成果
本项目构建的系统用于传输来自Jenkins(一款采用Java编写的开源自动化服务器)的数据。Jenkins作为基于服务器的系统,会发送各类通知信息,如“失败(False)”“成功(Success)”、用户名(username)、消息(msg)、编号(number)等。
该自动化服务器在ARCCORE公司办公室中配合Git插件使用。本项目开发的系统作为客户端,会从Jenkins服务器获取这些通知信息并传入Python程序,客户端每60秒监听一次服务器的新通知。
为确保程序正常运行,Python脚本需持续运行,通知信息会进一步发送至ECU,最终在LED面板上显示。
Python脚本可视为服务器与ECU之间的“桥梁”,起到网关作用:从Jenkins服务器获取的消息通过CAN总线转发至ECU,结果最终显示在LED面板上,具体系统架构可参考第3节“系统架构”中的图3.1。
借助Arctic Studio软件,项目团队得以使用AUTOSAR的相关函数;通过C语言编程,搭建了CAN、SPI及其他必要工具的数据采集与传输通信链路;在Arctic Studio中,还搭建了字母和数字的显示系统,确保这些字符能在LED面板的对应灯珠上点亮显示。
LED面板上显示的字母和数字会沿X轴(向左)移动,移动的文本长度根据输入内容计算;当滚动文本完全移出视野后,会从右侧重新开始向左滚动,具体效果可参考前一节(第5节)中的图5.4.3。此外,LED预先编程为以2毫秒(ms)的速度点亮,这是项目能实现的最快速度;若在程序执行过程中中途停止,可能会出现数字显示错误,如图6.1.1所示。
图6.1.1:LED显示效果对比图。图(A)显示正常滚动时的文本“SU00E551556E55”;图(B)中箭头标注了LED面板的焊接连接方式,状态1直接与ECU连接。程序正常运行时,字母/数字以2毫秒的速度移动,从人眼视角看字符是完整的;而在图(B)中,程序执行中途停止,可见状态1、2、3、4的偏移量比其他状态多移动了一步,导致显示异常)
6.2 LED显示屏的使用与调整
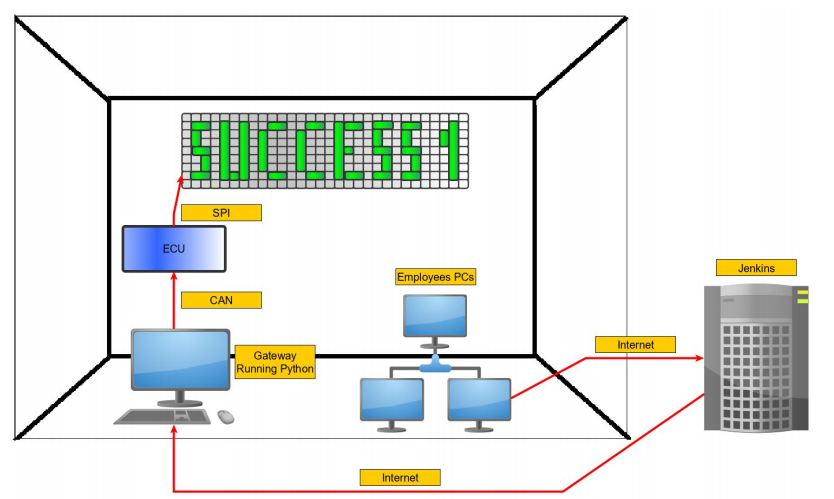
LED面板将安装在ARCCORE公司工具团队办公室的墙上,向办公室所有员工展示最新的提交构建记录以及成功构建的次数,具体安装布局如图6.2.1所示。目前,程序运行在一台PC上;未来ARCCORE员工可能会对硬件进行调整,将PC替换为更合适的设备(如树莓派(Raspberry Pi))。
图6.2.1:ARCCORE工具团队办公室布局示意图。墙上的LED面板显示“SUCCESS 1”(成功构建1次),系统包含员工电脑(Employees PCs)、Jenkins服务器(Jenkins)、运行中的Python网关(Running Python Gateway)、互联网(Internet)、CAN总线(CAN)、ECU、SPI总线(SPI)等组件及连接关系,其中Jenkins服务器位于ARCCORE办公室外部)
Python程序的功能是从Jenkins服务器获取通知信息。本项目中,系统主要监听三种通知类型:“成功(SUCCESS)”、“通过次数(passCount)”和“失败次数(failCount)”。
其中,“SUCCESS”用于条件判断(if-else语句):若在最新提交的构建记录中检测到“SUCCESS”,LED面板将显示类似“SUCCESSFUL BUILDS 1234”的内容(例如“1234”为Jenkins发送的“passCount”,即成功构建次数);若未检测到“SUCCESS”,则显示类似“FAILED BUILDS 1234”的内容(其中“1234”为Jenkins发送的“failCount”,即失败构建次数)。图6.2.2展示了LED面板可能的输出效果及对应显示颜色。
图6.2.2:LED面板输出效果示意图,示例显示文本“SESEPP”)
若需新增其他通知类型,需在Python文件中编写相应代码;文本颜色的设置则通过C程序实现,即需为不同消息类型指定对应颜色——文本和数字的默认颜色为红色,背景色始终为白色。
6.3 结果讨论
本系统仅支持显示大写字母,这一设计主要是因为在30×9的LED面板上,小写字母的显示效果不佳,难以清晰识别。若同时显示大小写字母和数字,还可能造成视觉混淆;若要解决这一问题,可采用更大尺寸的LED面板,但本项目无需额外扩展该功能。
项目团队曾在LED面板上进行过多种测试,包括显示不同颜色、闪烁效果等,但这些功能与本项目的核心实现目标无关,因此未纳入最终方案。仅硬编码所有字母和数字就已耗费大量时间,若有更多时间,可进一步实现更丰富的彩色消息显示功能。
07. 讨论
7.1 项目需求的完成情况
项目完成后,团队发现并非所有需求都已实现。在实施过程中,团队意识到部分功能的实现难度超出预期,尤其是在Arctic Studio中需要进行大量配置工作,才能确保硬件正常运行。
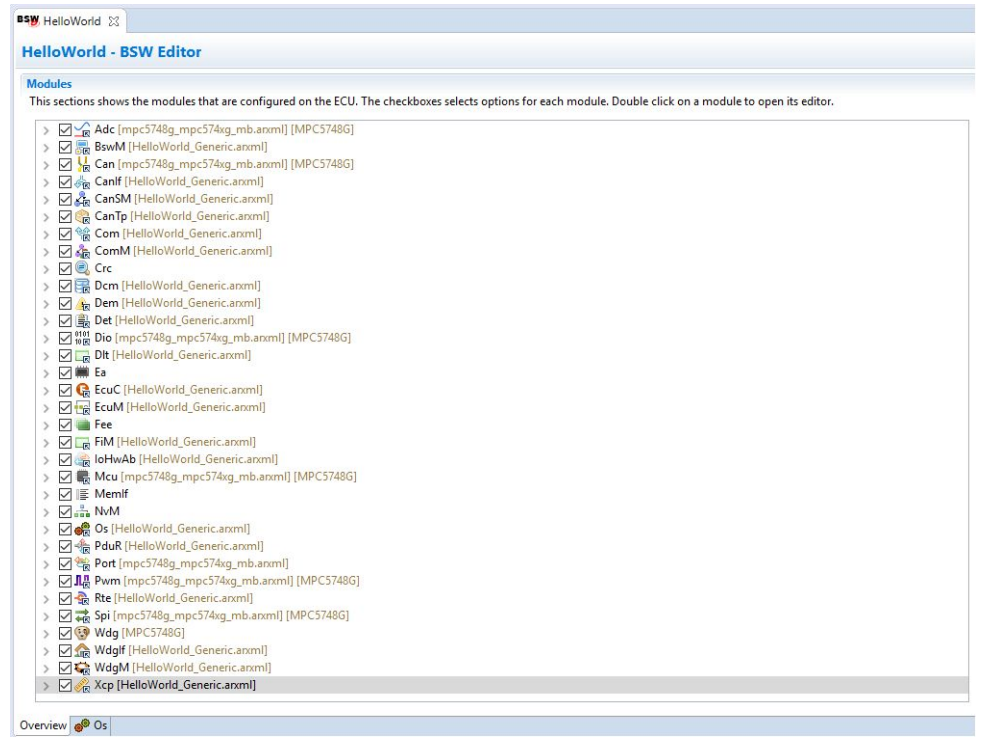
本项目基于一个名为“HelloWorld”的AUTOSAR项目搭建基础框架,该项目中已预先定义了SPI、CAN、端口(Ports)及波特率、通道、数据宽度、软件组件(SWCs)等属性,但团队仍需对这些预设属性进行调整,以适配本项目的需求。图7.1.1展示了Arctic Studio中的基础软件(BSW)编辑器界面。
图7.1.1:“HelloWorld8”项目的BSW编辑器界面
配置工作所耗费的时间超出预期,尤其是在实现ECU向LED发送数据的功能时,频繁出现硬件问题。团队需要仔细检查焊接情况,并使用万用表和PicoScope示波器进行测量,以确认数据是否按预期传输。
在选择CAN连接或以太网连接时,团队进行了对比分析:由于所使用的ECU同时支持CAN和以太网,最终决定通过CAN传输数据。原因在于,1Mbps速率的CAN总线比10Mbps速率的标准以太网/TCP/IP具有更高的帧率,且CAN通信安全性更高;若采用以太网连接,需额外使用TCP/IP等更高层级的协议,以确认发送的帧是否被丢弃,而CAN协议本身具备无冲突总线仲裁、多主站与广播通信、响应时间受协议软件处理时间限制、数据完整性保障等特性,可直接实现安全传输。
7.2 预期结果
项目总体达到了预期目标。团队起初并未期望完成所有需求,因为此前对AUTOSAR的了解有限,也不确定该平台能否适配项目构想。团队与ARCCORE在项目准备阶段的工作较为充分,但在硬件调试过程中仍遇到较多问题,需要大量排查工作。
最终成果与项目启动前团队和ARCCORE在会议中讨论的方向一致。原本计划的下一步是集成传感器,但传感器采集的信息并非办公室“必需”的展示内容;相比之下,将Jenkins服务器的实时数据发送至办公室LED面板,对员工而言更具实际价值。
7.3 从结果中得出的结论
本项目在AUTOSAR平台上实现了预期功能且无故障运行,这一成果具有重要意义,因为它为两个研究问题提供了实践依据。
对于第一个研究问题 ——“在与汽车行业无直接关联的设备上,是否能够实施AUTOSAR标准?”,无法简单给出“是”或“否”的答案。原因在于本项目系统较为简单,仅使用了一个“可运行实体”(Runnable),虽能无故障运行,但若增加更多软件组件,程序可能会变得混乱,且需要大量额外配置才能正常工作。若要将AUTOSAR应用于更复杂、与汽车无直接关联的系统,或许能得出更具说服力的结论——复杂系统的应用场景能更充分地利用AUTOSAR的特性,并测试其应用边界。
对于第二个研究问题——“在与汽车行业无直接关联的系统中,AUTOSAR的运行表现如何?”,本项目系统的运行表现良好。但如前所述,团队需对各类模块进行大量调整;且由于AUTOSAR平台上运行的程序比Python程序稍慢,需通过睡眠函数(sleep functions)来协调CAN总线的数据传输时序。
若本项目不使用AUTOSAR,系统性能可能会更优——移除AUTOSAR的抽象层后,代码可更精简,且能对系统各环节实现更直接的控制。
综上可得出结论:AUTOSAR适用于本项目规模的任务。AUTOSAR内置的函数简化了许多开发工作,其分层架构使团队能通过调整ECU,实现对所开发系统的全面控制。从图6.1.1也可看出,所使用的软件能清晰地展示待配置的组件,操作便捷性较高。
7.4 社会与环境影响
本项目开发的LED可视化面板在市场上并非创新产品——类似的显示设备广泛应用于超市(如显示“欢迎光临”)、火车站(如显示到站与发车信息)等场景。本项目产品与其他同类产品的核心区别在于,它基于AUTOSAR平台构建。若未来能将本项目进一步开发为信息娱乐系统(这也是项目的潜在最终目标),其对社会、环境及实际生活的影响将显著提升。
十年前,汽车中尚未普及信息娱乐系统;如今,随着智能手机的普及,汽车信息娱乐系统也日益大众化。随着汽车的控制方式从机械控制向自动控制转变,信息娱乐系统极大地提升了驾驶的便利性——例如,倒车影像功能大幅降低了停车难度,这是信息娱乐系统的积极应用案例。
但信息娱乐系统也存在负面影响:这类系统通常能通过CAN总线访问汽车的各类功能,这意味着车辆存在被第三方设备通过黑客技术远程控制的风险(如“线控驾驶”劫持)。
此外,随着汽车数字化程度不断提高,环境负担也随之加重。电子设备的废弃量已十分庞大,而信息娱乐系统的普及将进一步增加电子废弃物的产生。电子废弃物中含有大量有害物质和化学物质,这些物质在废弃处理过程中会释放到环境中,对全球环境及人类健康造成负面影响。
7.5 项目发展潜力
若有更多时间,团队可实现此前规划的低优先级需求——集成传感器(如采集办公室温度数据,并在LED面板上显示)。此外,还可添加物理按键实现更多功能:若系统需从多个数据源采集数据,可通过物理按键切换LED面板显示的数据类型,这需要在代码中新增相应的控制函数。
未来,本项目可进一步开发为采用自适应AUTOSAR(Adaptive AUTOSAR)的信息娱乐显示屏——这类显示屏目前已广泛应用于汽车领域。如今,许多现代汽车都配备了信息娱乐系统,但普遍存在一个问题:驾驶过程中难以安全使用。解决该问题的一个方案是在系统中集成语音指令功能——用户可通过语音获取所需信息,从而将注意力集中在驾驶上。希望未来本项目的开发能朝着这一方向推进,以解决当前信息娱乐系统存在的核心痛点。
就目前而言,本项目已具备坚实的基础,ARCCORE可根据办公室的实际需求,进一步调整其功能,使其更贴合使用场景。
| 






 订阅
订阅