| 编辑推荐: |
本文系统性的介绍了自动驾驶系统中高精度定位技术的原理、方法与挑战,希望对您的学习有所帮助。
本文来自于Linux源码阅读,由火龙果软件Alice编辑、推荐。 |
|
简介
在自动驾驶系统中,定位( Localization )是核心基础能力之一。它的任务非常明确:
确定车辆在高精度地图中的精确位置——精确到厘米级。
这不仅是“导航”,更是安全行驶的前提。如果车辆不知道自己确切的位置,就无法正确规划路径,也无法判断是否偏离车道,甚至可能导致严重事故。
为什么普通GPS不够用?
我们日常使用手机导航时,依赖的是 GPS(全球定位系统),它能提供大约 1~3米 的定位精度。但在自动驾驶场景下,这一精度远远不够。
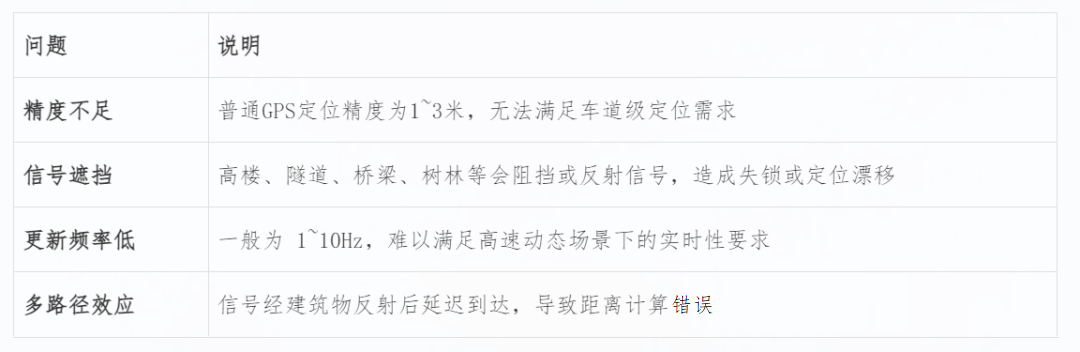
GPS的局限性:
- 精度不足:3米误差意味着可能跨过车道线,对自动驾驶来说不可接受;
- 信号遮挡:在城市高楼间(“城市峡谷”)、隧道、地下停车场或山区,GPS信号会减弱甚至丢失;
- 多路径效应:信号经建筑物反射后产生延迟,导致定位漂移。
结论:仅靠GPS无法满足L3及以上自动驾驶的定位需求。
如何实现高精度定位?核心思路
既然GPS不够准,那就需要结合其他传感器与高精度地图,通过“感知 + 匹配 + 融合”的方式,实现厘米级定位。
核心方法:
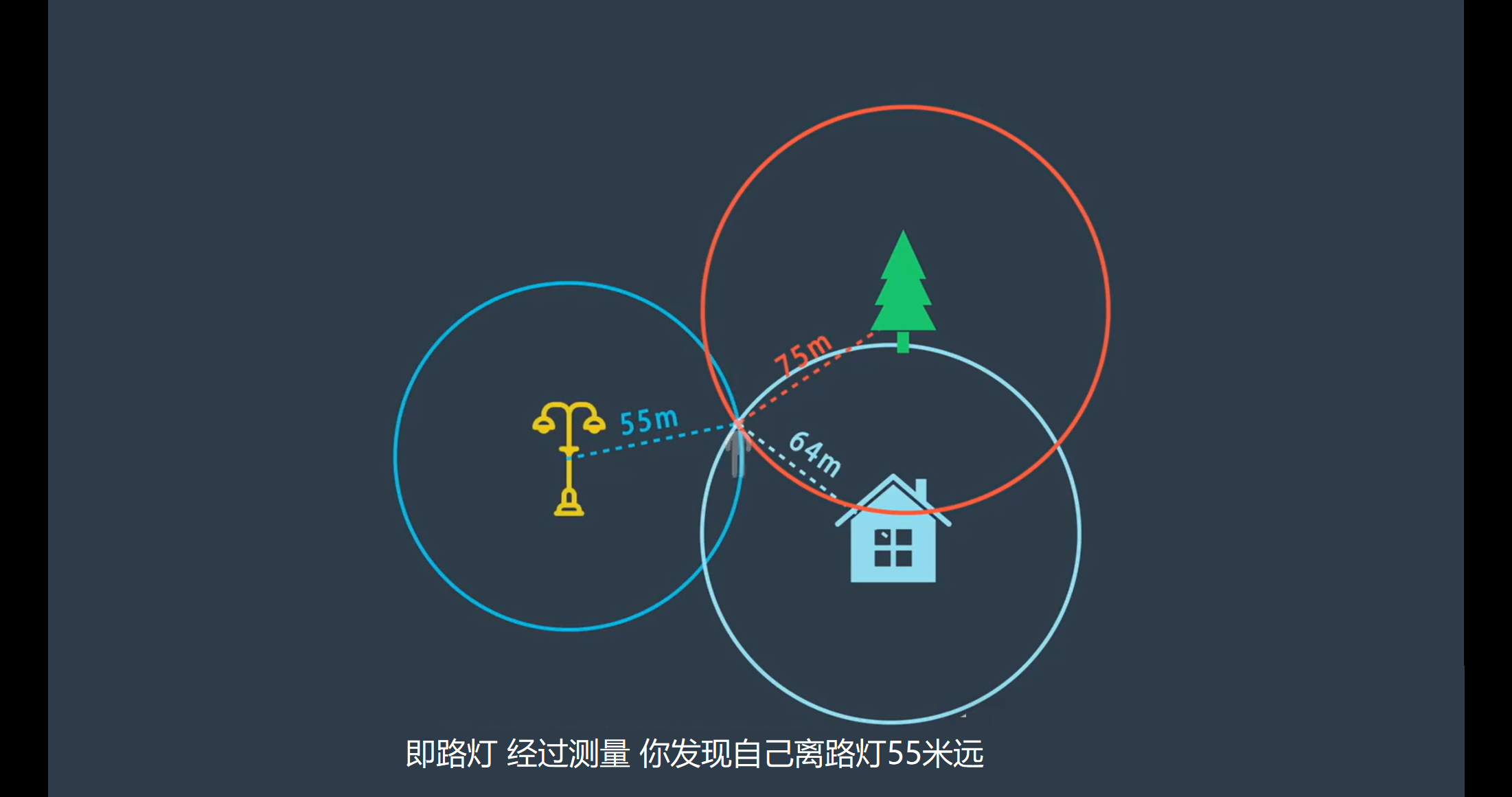
将车辆传感器所“看到”的环境特征(如电线杆、树木、建筑边缘)与高精度地图中已知的地标位置进行比对,从而反推出车辆当前的精确坐标。
这个过程就像:
“我在一个熟悉的街区,看到前方是某家咖啡馆、左边是邮局——那我现在应该站在街角第三棵树的位置。”
坐标系的理解:车辆坐标系 vs 地图坐标系
要完成上述匹配,必须理解不同坐标系之间的关系。
1. 车辆坐标系(Body Frame)
- 原点在车辆某参考点(如后轴中心)
- X轴指向车辆前进方向,Y轴向左,Z轴向上
- 随车辆移动和转向而实时变化
- 所有传感器(如激光雷达、摄像头)最初都在此坐标系下输出数据
2. 地图坐标系(Map Frame / World Frame)
- 固定不变的全局坐标系(如UTM或ECEF)
- 高精度地图基于此坐标系构建
- 所有车辆最终都需要将自己的位置转换到该坐标系中
关键挑战:坐标变换
由于车辆在运动中不断转弯、加速、颠簸,其自身坐标系始终在变化。因此,必须将传感器观测到的地标位置,从车辆坐标系转换到地图坐标系,才能与地图数据匹配。
这一过程称为 坐标变换(Transformation),是定位算法的核心步骤之一。常用数学工具包括:旋转矩阵、四元数、齐次变换等。
常见的自动驾驶定位技术
为了实现高精度定位,通常采用多源融合策略,结合多种技术优势互补.
GNSS RTK(实时动态差分定位)
- 在普通GPS基础上引入地面基站校正信号
- 精度可达 5~10厘米
- 优点:全球可用;缺点:仍受遮挡影响,需配合其他传感器
全球定位系统(GPS)是自动驾驶中实现定位的基础技术之一。它由三个核心部分组成,共同协作以确定地球上任意位置的坐标。
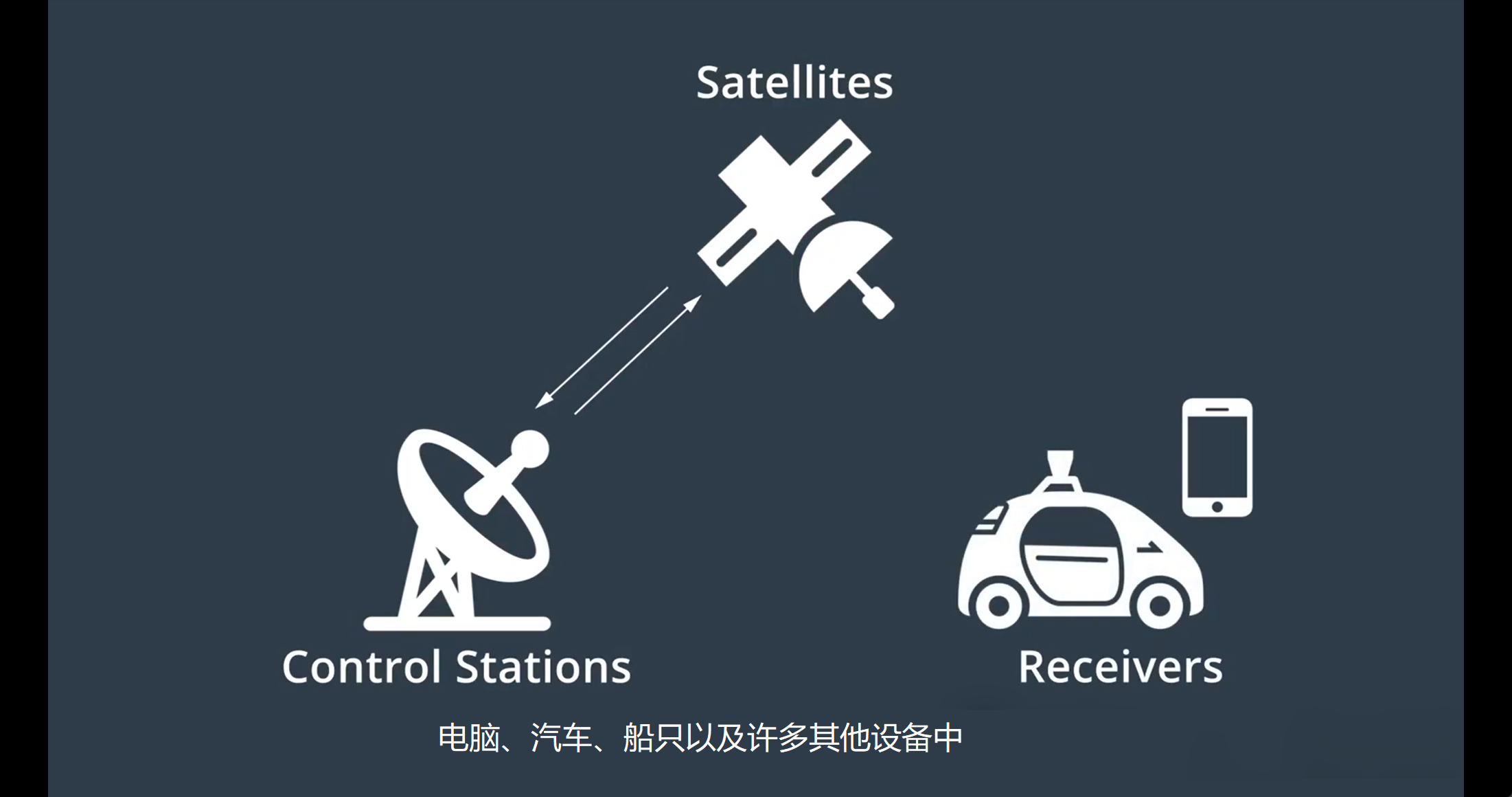
一、GPS 的三大组成部分
1. 空间段:GPS 卫星
- 在地球中轨道(约20,200公里高空)运行着约 30颗GPS卫星,确保地球上任何地点、任何时间都能接收到至少4颗卫星信号。
- 每颗卫星均配备高精度原子钟,用于生成极其精确的时间戳信号,这是定位精度的关键。
2. 控制段:地面控制站
- 分布在全球的多个地面监控站负责:
- 跟踪卫星运行状态
- 校正卫星轨道参数
- 监测并验证广播信号的准确性
- 控制中心会定期向卫星发送更新数据,确保整个系统稳定可靠运行。
3. 用户段:GPS 接收器
- 安装在车辆上的 GPS 接收器,需同时接收到至少四颗卫星的信号才能完成三维定位(经度、纬度、高度)和时间同步。
- 接收器并不直接测量距离,而是通过计算信号从卫星到接收器的传播时间,再乘以光速,得到“伪距”(Pseudorange):
二、GPS 的局限性
尽管 GPS 广泛应用,但在自动驾驶场景下存在明显不足:
三、提升精度:RTK(实时动态差分定位)
为了克服普通 GPS 的精度瓶颈,自动驾驶广泛采用 RTK(Real-Time Kinematic) 技术。
RTK 的工作原理:
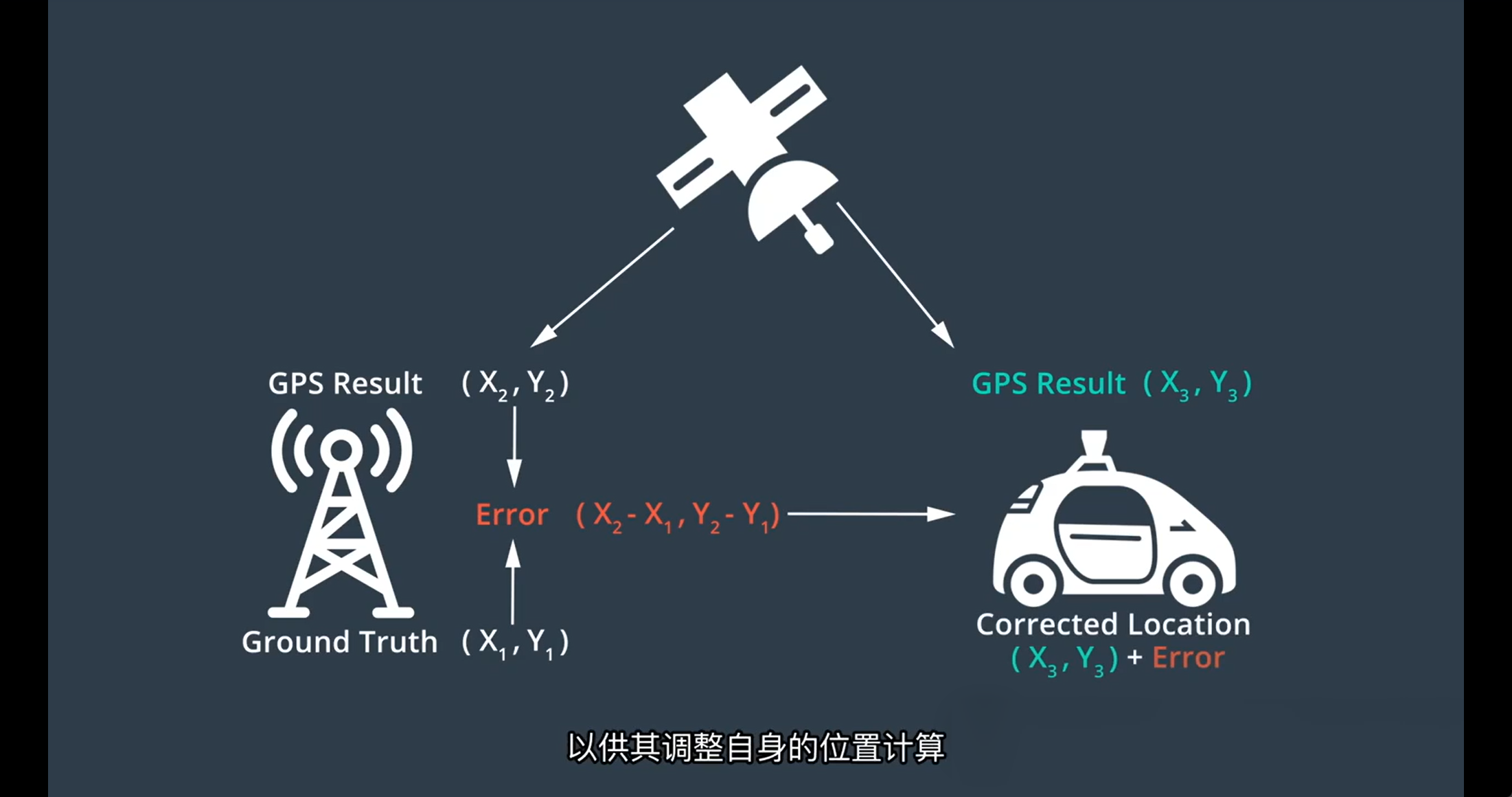
建立基准站(Base Station)
-
在地面部署一个或多个已知精确坐标的固定基站;
-
基站同时使用 GPS 测量自身位置。
计算误差
- 将 GPS 测量值与已知的“地面实况”位置进行比较;
- 二者之间的偏差即为当前 GPS 系统的综合误差(包括大气延迟、卫星钟差、轨道误差等)
误差校正
- 基站将该误差信息通过无线网络(如4G/5G)实时发送给附近的移动接收器(如自动驾驶车辆);
- 车辆接收器利用此校正量,修正自身的 GPS 测量结果。
RTK 的优势:
- 定位精度可提升至 5~10厘米级;
- 显著改善城市环境下的定位稳定性;
- 是 L3/L4 自动驾驶中 GNSS 定位的核心增强技术。
四、RTK 的局限性
尽管 RTK 极大提升了精度,但仍面临挑战:
- 依赖基站覆盖:必须在基站有效通信范围内(通常10~20公里);
- 信号遮挡问题依然存在:高楼、隧道等仍会导致信号丢失;
- 初始化时间较长:需要几秒到几十秒完成“模糊度解算”才能输出高精度结果;
- 成本较高:需部署和维护基站网络。
惯性导航系统(INS)
在自动驾驶定位系统中,除了依赖卫星信号的GPS,我们还需要一种能够在短时间内连续提供位置和速度信息的技术——这就是惯性导航,其核心传感器是 IMU(Inertial Measurement Unit,惯性测量单元)。
- 使用IMU(惯性测量单元)测量加速度和角速度
- 可在GPS丢失时短时“推算”位置(航位推算)
- 优点:不依赖外部信号;缺点:误差随时间累积(漂移)
✅ GNSS + INS 融合是主流方案,称为 GNSS/INS组合导航系统。
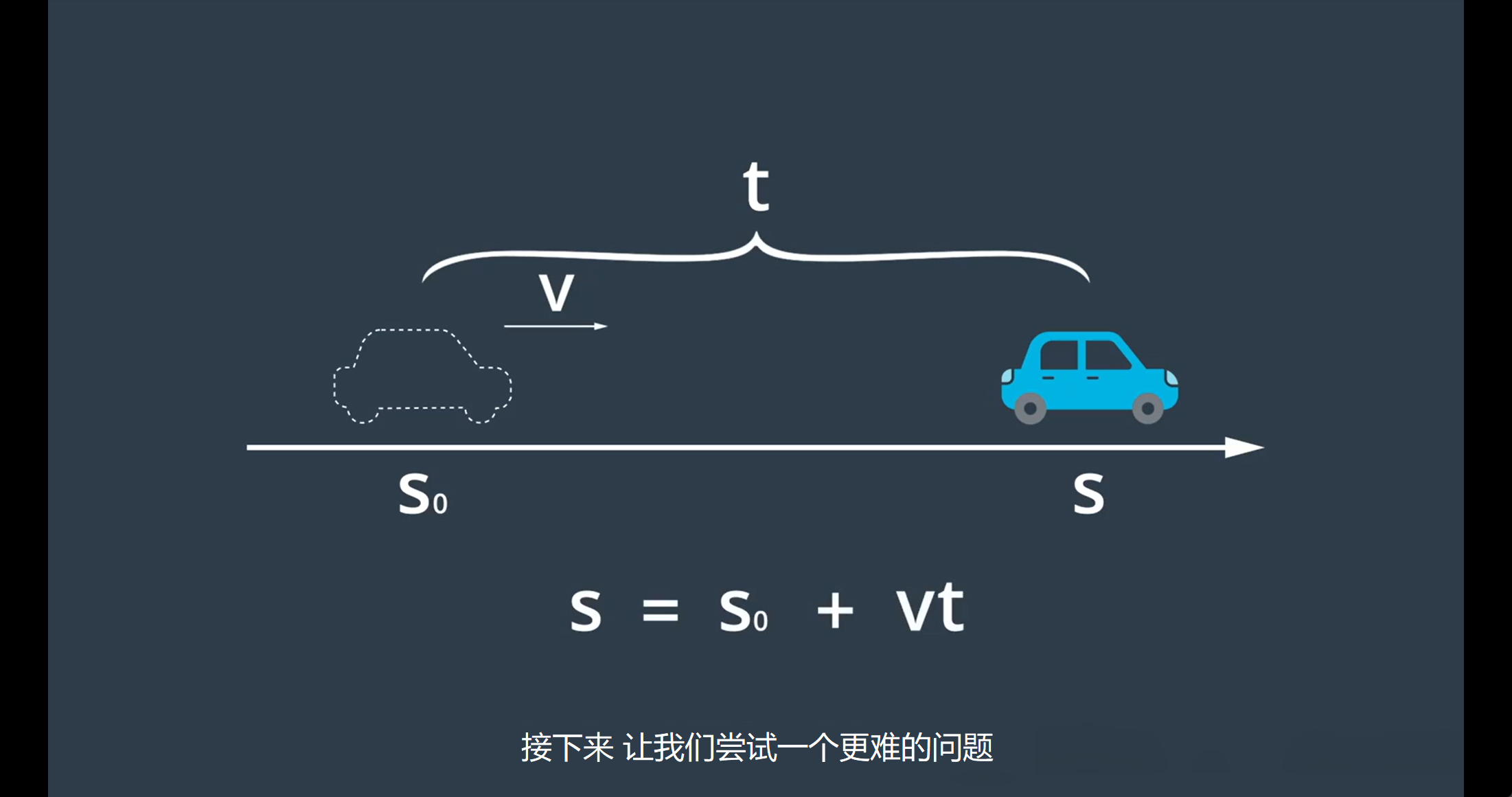
如何通过运动学计算位置与速度?
根据经典运动学公式只要知道:
就可以推算出车辆在任意时刻的速度和位置。
但问题来了:我们如何测量加速度?
答案是使用 三轴加速度计(Triaxial Accelerometer),它可以测量车辆在三个方向(前后、左右、上下)上的加速度。
然而,加速度计有一个关键限制:
它测量的是车辆自身坐标系(Body Frame)下的加速度,而不是地图所使用的全局坐标系(World Frame)。
因此,若车辆正在转弯或倾斜,必须将加速度数据从“车体坐标系”转换到“全局坐标系”,才能正确积分计算位移。
为了完成这一坐标变换,我们需要另一个传感器——陀螺仪( Gyroscope )。
陀螺仪用于测量车辆绕三个轴的角速度(即旋转速率),通过积分可得到车辆的姿态变化(偏航角、俯仰角、翻滚角)。
结合陀螺仪的姿态信息,我们就能实时计算出加速度计数据在全局坐标系中的投影,从而正确进行位移和速度的积分运算。
IMU 的优势与局限
优势:高更新频率,实时性强
- IMU 的采样频率通常高达 100Hz 甚至 1000Hz,远高于 GPS 的 1~10Hz;
- 可在极短时间内提供连续的位置、速度和姿态更新;
- 特别适合在 GPS 信号短暂丢失时“填补空白”,被称为定位系统的“时间桥梁”。
局限:误差随时间累积(漂移)
- 加速度需要两次积分才能得到位置,任何微小的测量误差都会被不断放大;
- 例如,加速度偏差仅 0.01 m/s²,经过 10 秒积分后,位置误差可达 0.5 米;时间越长,误差越大;
- 因此,IMU 仅适用于短时定位,无法长期独立使用。
GPS + IMU 融合:取长补短的黄金组合
为克服各自的缺点,自动驾驶系统普遍采用 GPS 与 IMU 融合定位:
通过滤波算法(如卡尔曼滤波),系统可以:
- 用 GPS 定期修正 IMU 的位置和速度;
- 用 IMU 在 GPS 信号丢失期间维持定位输出。
现实挑战:长时间 GPS 丢失
尽管 GPS + IMU 是主流方案,但在某些场景下仍面临挑战:
- 隧道、地下停车场、城市峡谷、山区道路等环境中,GPS 可能长时间完全丢失;
- 此时仅靠 IMU 无法维持高精度定位,误差会迅速扩大。
解决方案:引入其他传感器(如激光雷达、摄像头)与高精度地图匹配,形成多源融合定位系统。
LiDAR 定位:点云匹配与高精地图协同
在自动驾驶系统中,当 GPS 信号受限(如隧道、城市峡谷)时,激光雷达(LiDAR)定位成为实现厘米级精度的关键手段。其核心原理是:
将实时采集的点云数据与预先构建的高精度地图进行匹配,从而确定车辆在全球坐标系中的精确位置和姿态。
一、点云匹配:定位的核心思想
LiDAR 定位的本质是 “感知-地图比对”:
- 车辆上的激光雷达持续扫描周围环境,生成三维点云;
- 将这些实时点云与已知的高精度三维点云地图进行比对;
- 通过算法寻找最佳匹配位置,反推出车辆当前的位姿(位置 + 方向)。
这就像你走进一个熟悉的房间,仅凭看到的家具布局就能判断自己站在哪里。
二、常用点云匹配算法
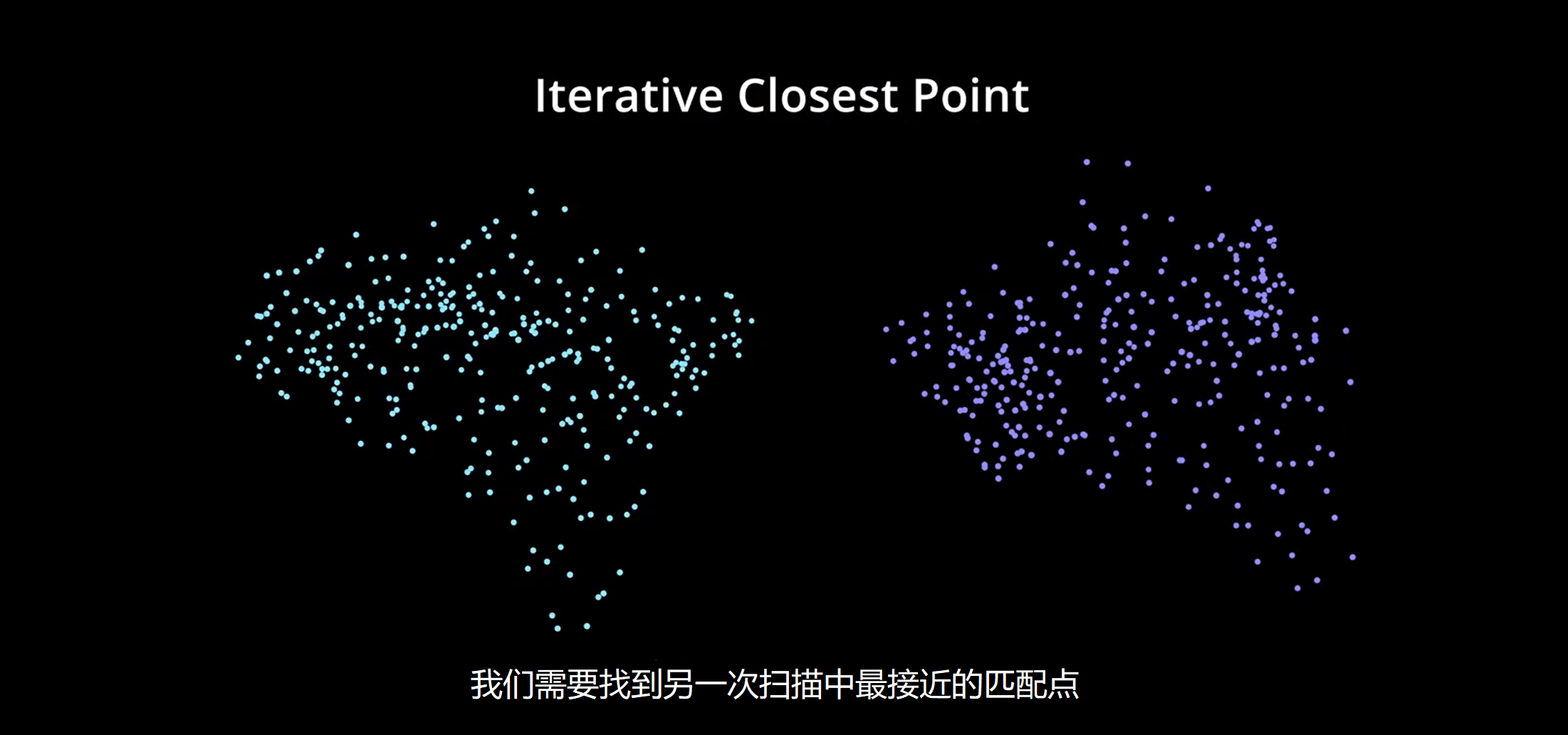
1. ICP(Iterative Closest Point,迭代最近点)
ICP 是最经典的点云配准算法之一,适用于两帧点云之间的对齐。
工作流程:
- 对于当前扫描的每个点,在参考点云(地图)中找到最近的对应点,形成点对;
- 计算所有点对之间的平均距离误差;
- 通过不断调整旋转和平移参数,最小化该误差;
- 重复迭代,直到误差收敛到最小值。
输出结果:
- 得到从当前点云到地图点云的最优变换矩阵;
- 即可推算出车辆在地图中的精确位姿。
缺点:对初始位置敏感,计算量大,需较接近的真实初值才能收敛。
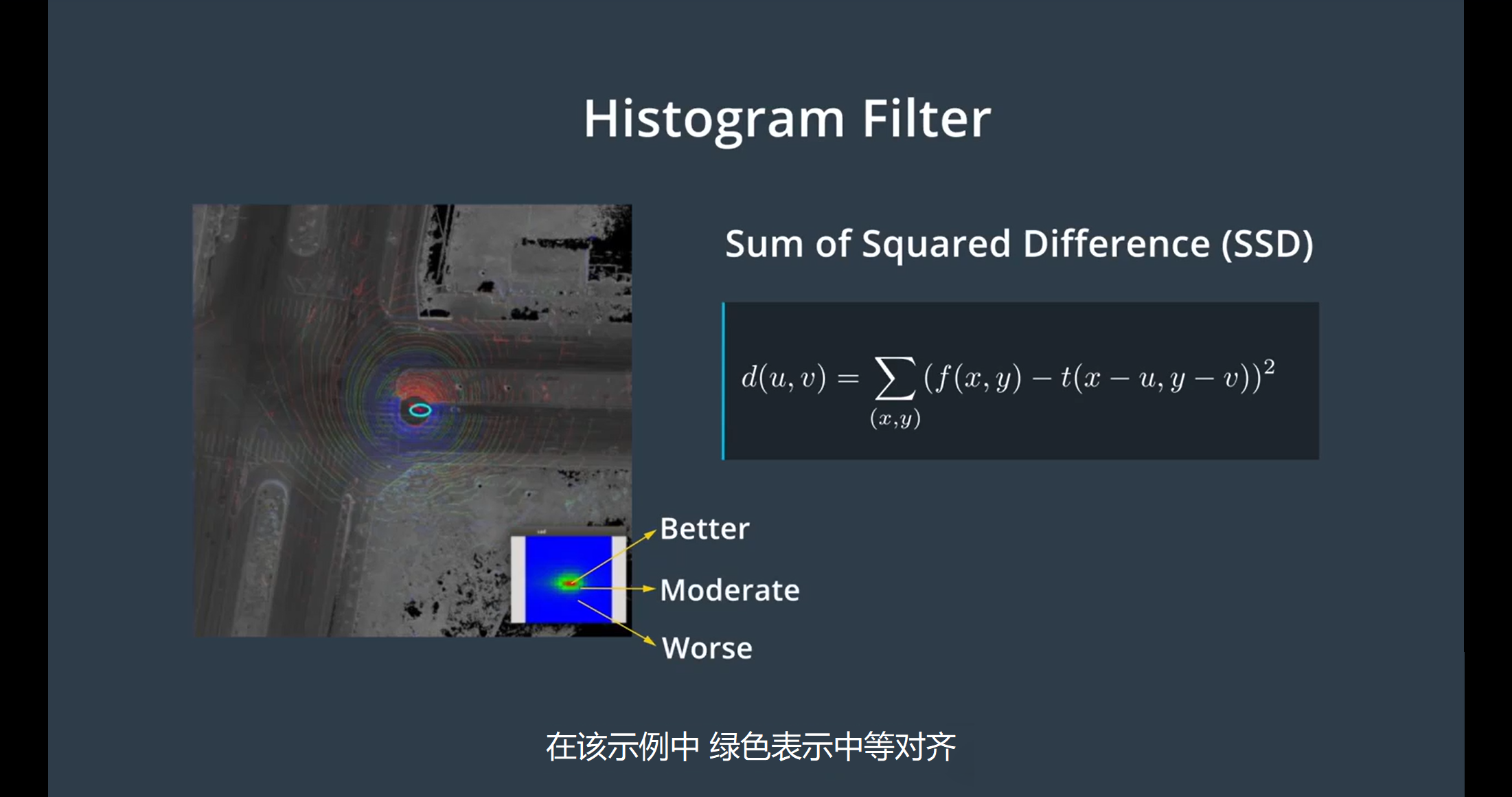
2. 直方图滤波(Histogram Filter) / SSD 匹配法
Apollo 系统中采用的一种高效定位方法,也称为 误差平方和(Sum of Squared Differences, SSD) 算法。
核心思想:
- 将当前传感器扫描的点云“滑动”遍历地图上的每一个可能位置;
- 在每个候选位置,计算扫描点与地图对应点之间的距离误差平方和;
- 误差越小,表示匹配度越高;
- 最终选择误差最小的位置作为车辆的估计位姿。
特点:
- 可在全局范围内搜索,适合初值未知的情况;
- 匹配效果可通过可视化呈现——例如,红色点表示对齐良好的点,直观反映匹配质量;
- 计算复杂度较高,通常用于离线或局部精匹配。
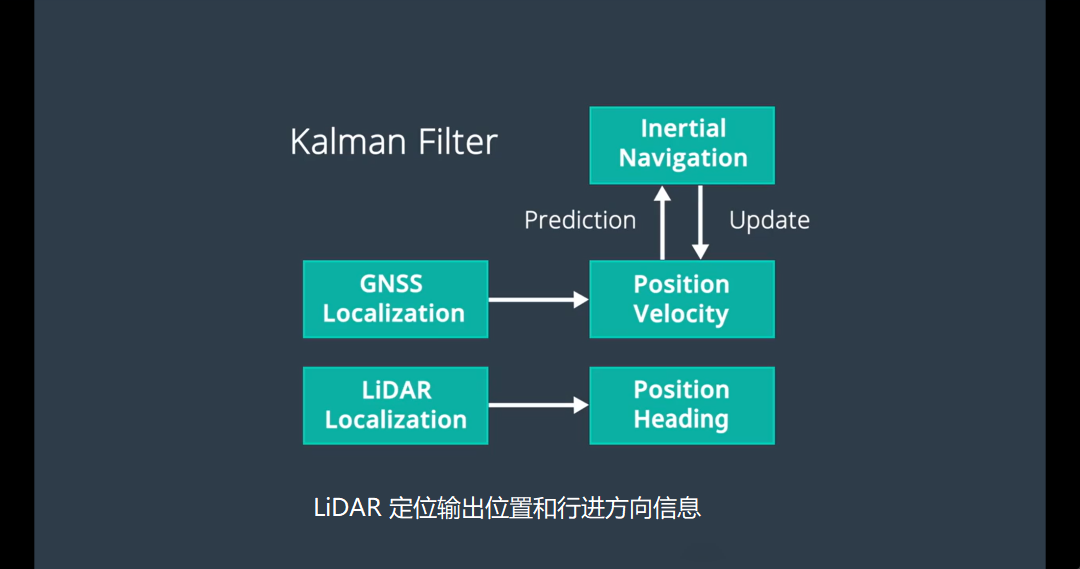
3. 卡尔曼滤波(Kalman Filter)在LiDAR定位中的应用
虽然卡尔曼滤波本身不是点云匹配算法,但它常用于融合 LiDAR 匹配结果与其他传感器数据,提升定位稳定性。
工作机制:预测-更新循环
预测阶段:
- 基于上一时刻的状态(位置、速度、方向)和车辆运动模型(如IMU、轮速计),预测当前时刻的位姿
更新阶段:
- 使用 LiDAR 匹配得到的新观测值(位置);
- 结合预测值与观测值,利用概率加权(卡尔曼增益)得到更精确的估计;
- 更新状态,并进入下一周期。
这个“预测 → 观测 → 修正”的闭环持续运行,实现稳定、平滑的定位输出。
三、LiDAR定位的优势
在 Apollo 系统中,LiDAR 定位模块(localization)正是通过 ICP 或 NDT(正态分布变换)算法,结合高精地图实现稳定输出。
四、LiDAR定位的挑战与局限
尽管技术成熟,LiDAR 定位仍面临现实难题:
1. 高度依赖高精度地图
- 必须提前构建高质量的三维点云地图;
- 地图一旦过时,匹配精度将大幅下降。
2. 地图更新困难
- 高精地图包含大量静态元素(如道路轮廓、电线杆、交通标志);
- 但现实中存在大量动态干扰:
- 停放的车辆、行人、施工围挡、垃圾、落叶等;
- 这些“临时物体”在地图中不存在,却会出现在实时点云中,造成误匹配。
例如:今天路边停着一辆车,地图中没有;明天车开走了,点云突然“少了一块”——系统可能误判为定位偏移。
3. 环境变化频繁
- 道路改造、植被生长、积雪覆盖等都会改变点云结构;
- 几乎不可能让地图“完全实时更新”。
视觉定位
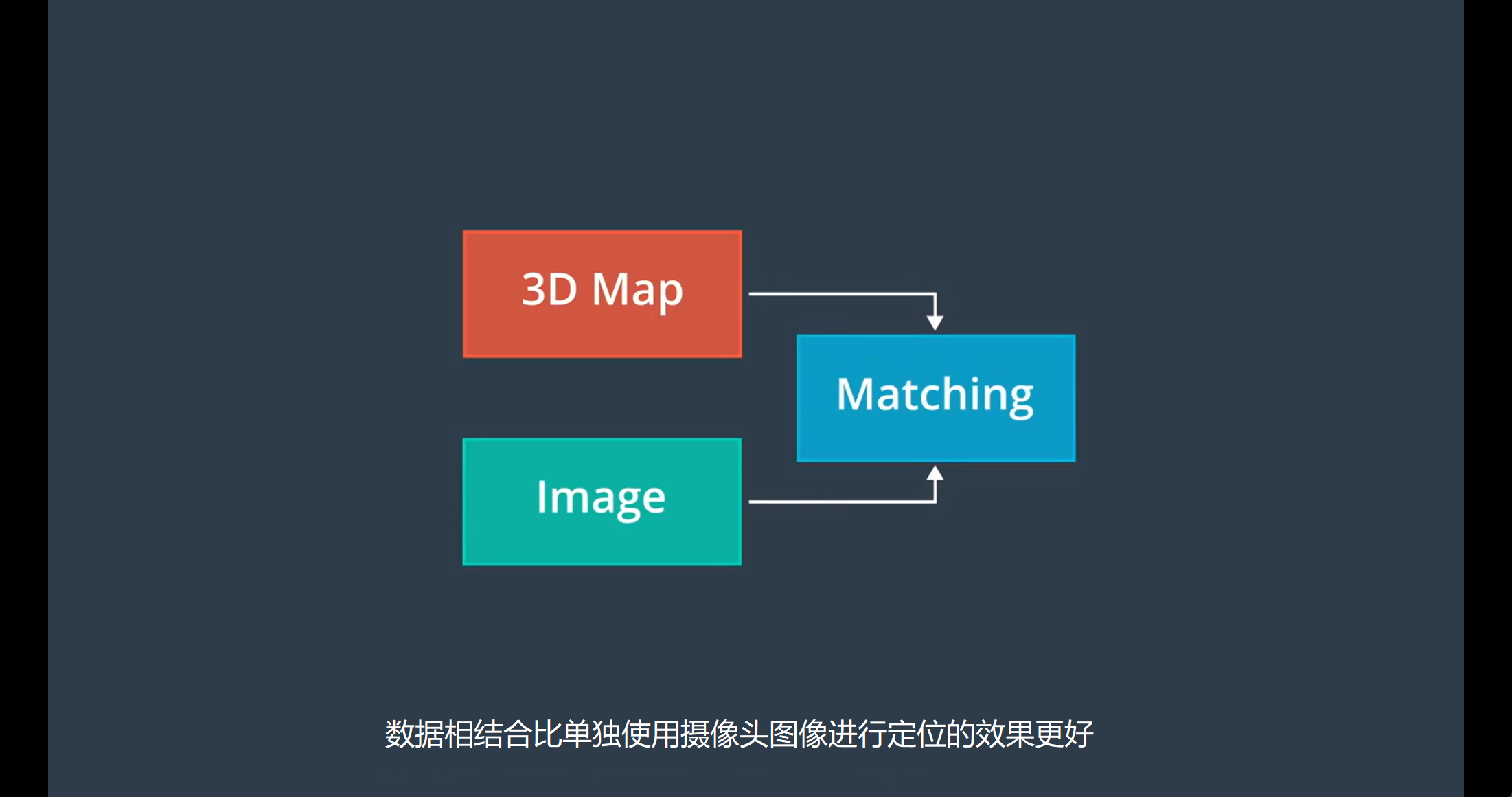
在自动驾驶的多传感器体系中,摄像头是最常见、成本最低、信息最丰富的传感器之一。它能够捕捉丰富的纹理、颜色和语义信息,是环境感知的核心工具。然而,仅靠图像实现高精度定位非常困难。因此,视觉定位通常不单独使用,而是与高精度地图、GPS 和其他传感器数据融合,共同提升定位精度。
一、为什么视觉定位难以独立完成?
尽管图像数据易于获取、种类多样,但其用于定位存在天然局限:
- 缺乏深度信息:单目摄像头无法直接获取距离,难以判断物体远近;
- 受光照影响大:夜间、逆光、雨雪天气会显著降低图像质量;
- 视角依赖性强:同一场景从不同角度拍摄,图像差异巨大;
- 动态干扰多:行人、车辆等移动物体会影响匹配稳定性。
二、视觉 + 地图 + 概率:协同定位的核心思路
为了提升视觉定位的准确性,系统采用“感知 + 先验地图 + 概率推理”的方法。其核心思想是:
通过摄像头观察到的特征(如车道线、树木、标志),结合高精地图中的已知信息,利用概率模型推断车辆最可能的位置。
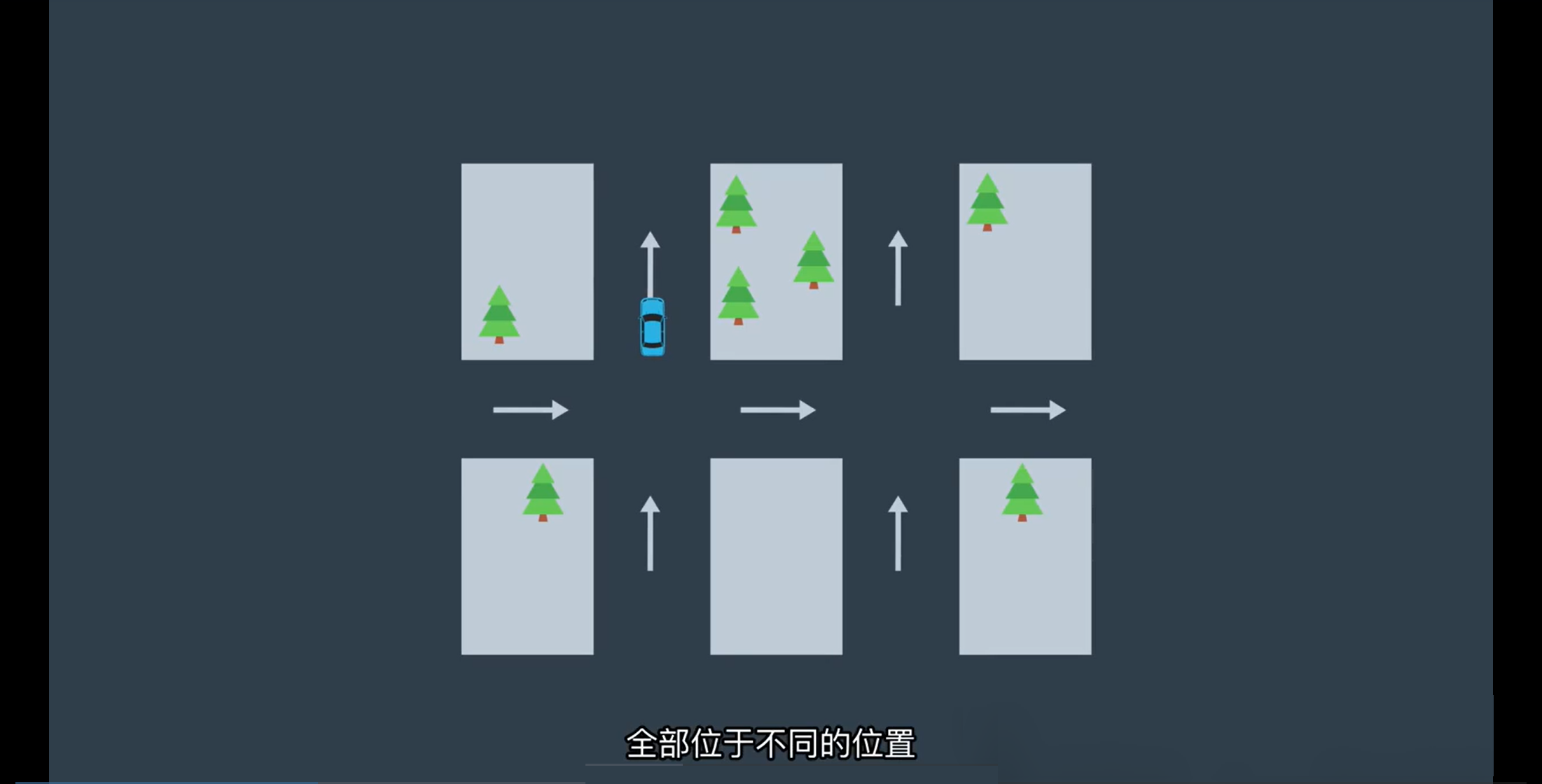
举个例子:
假设车辆摄像头检测到“道路右侧有一棵树”。
但地图显示道路右侧有多棵树,分布在不同位置——我们如何判断看到的是哪一棵?
这时,系统不会直接“猜”,而是使用概率方法进行推理。
三、粒子滤波:视觉定位中的“概率搜索”引擎
解决这类定位问题的经典算法是 粒子滤波( Particle Filter )。
1. 什么是粒子?
- “粒子”代表车辆可能所处的一个候选位姿(位置 + 方向);
- 系统在道路上生成大量粒子,覆盖所有可能的位置。
2. 工作流程:观测 → 匹配 → 权重更新 → 重采样
步骤1:初始分布
- 在道路范围内随机或均匀分布成千上万个粒子,每个粒子代表一个假设位置。
步骤2:第一次观测(如“右侧有一棵树”)
- 对每个粒子,查询其在地图中“右侧是否能看到一棵树”;
- 能看到的粒子获得高权重,看不到的权重降低;
- 实际上“看不到树”的位置被逐步排除。
步骤3:继续行驶并更新
- 车辆前行,摄像头再次观测:“右侧又出现一棵树”;
- 系统检查哪些粒子所在位置能看到“一排两棵树”;
- 只有少数位置满足该条件 → 这些粒子权重大幅提升;
- 其他位置的粒子被进一步淘汰。
步骤4:收敛到最可能位置
- 随着持续观测,粒子逐渐聚集在最符合观测结果的区域;
- 最终,系统输出这些高权重粒子的平均位姿,作为当前车辆的估计位置。
这个过程不断循环,实现动态、实时的定位更新。
四、车道线匹配:视觉定位的典型应用
由于树木等自然特征在城市道路中较少且不规则,而车道线几乎存在于所有道路上,因此成为视觉定位中最常用的匹配特征。
视觉车道线匹配流程:
- 摄像头实时拍摄前方道路,提取车道线像素;
- 将这些车道线与高精地图中预存的车道线几何形状进行比对;
- 计算图像中车道线与地图中不同位置车道线的匹配程度(如距离误差、方向一致性);
- 匹配度越高,说明车辆越可能位于该地图位置。
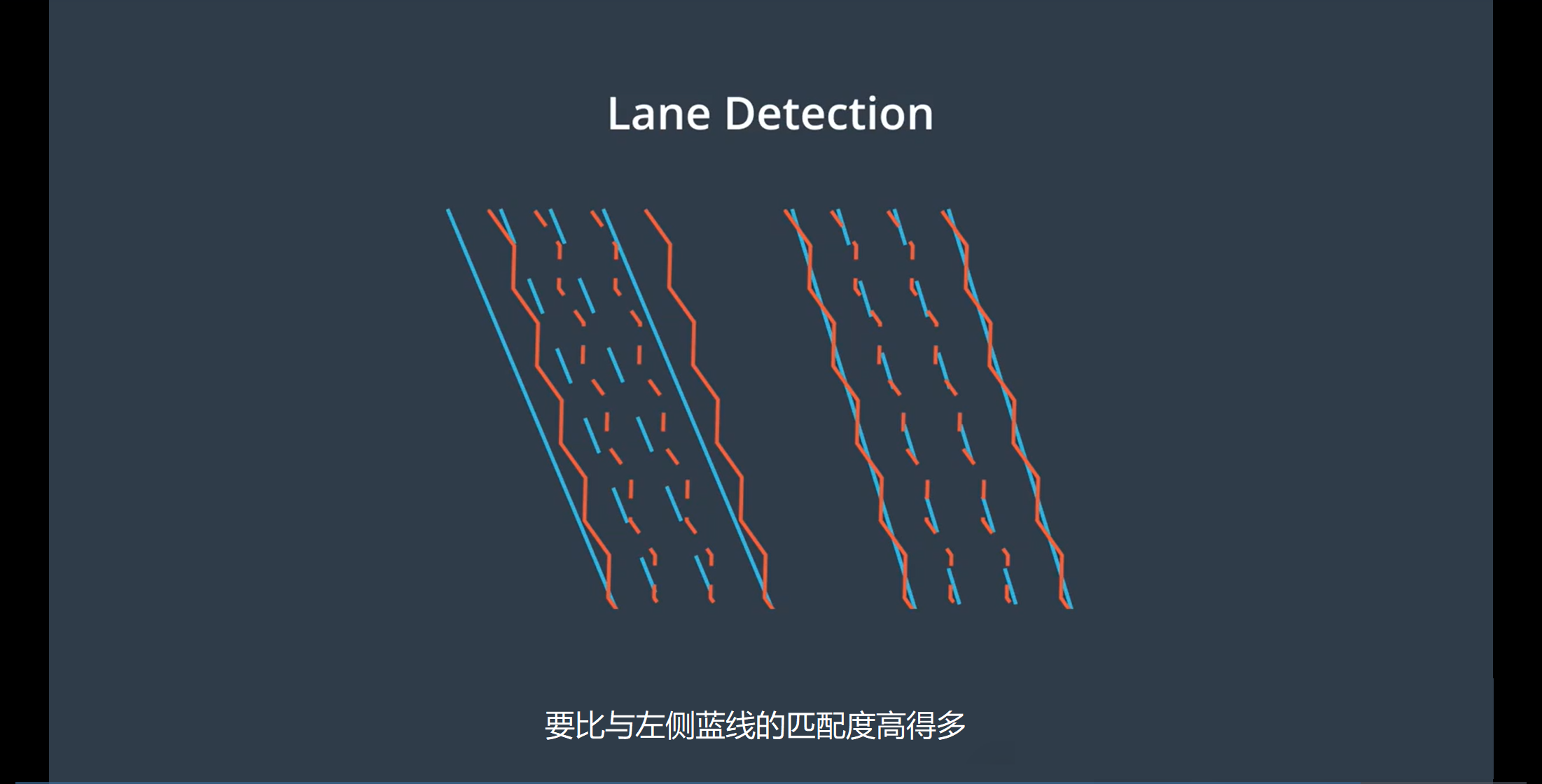
示例说明:
- 蓝色线:地图中两个不同位置的车道线形状;
- 红色线:摄像头实际检测到的车道线;
- 若红色线与右侧蓝色线高度重合,而与左侧差异较大 → 车辆更可能位于右侧对应的地图位置。
这种“图像-地图”匹配方式,显著提升了定位的准确性和鲁棒性。
Apollo 如何解决定位问题?
百度 Apollo 采用多传感器融合 + 高精地图匹配的综合定位方案:
- 输入:GNSS、IMU、LiDAR、轮速计、高精地图
- 核心算法:融合滤波(如EKF、Particle Filter)、点云匹配(NDT/ICP)
- 输出:车辆在地图坐标系下的六自由度位姿(x, y, z, roll, pitch, yaw)
- 实现:通过 localization 模块,在 Cyber RT 框架下实时发布定位结果
Apollo 的定位系统可在 GPS 失效时(如隧道),仅靠 LiDAR + 地图实现连续稳定定位,误差小于20厘米。
总结:定位的本质
定位 = 传感器感知 + 地图先验 + 坐标变换 + 多源融合
它不是单一技术的胜利,而是系统工程的结晶。高精度地图提供了“已知世界”,传感器提供了“实时观察”,而坐标变换与融合算法则完成了“从看到到知道”的跨越。
| 






 订阅
订阅