| 编辑推荐: |
本文介绍了在汽车电子控制单元(ECU)里,WDGM 与系统容错机制,及两者如何协同作用。希望对您的学习有所帮助。
本文来自于汽车软件大本营,由火龙果软件Linda编辑、推荐。 |
|
前 言
在汽车电子控制单元(ECU)的世界里,有一个残酷的事实:软件一定会出错。无论你的代码多么精妙,测试多么充分,总会存在死循环、资源阻塞、任务超时等问题。而在一辆车的运行过程中,哪怕是
ECU 一秒钟的“失联”,都可能带来严重后果。
在 AUTOSAR 中,这个角色由 WDGM(Watchdog Manager,看门狗管理模块) 承担。它与
SYS(系统容错机制) 紧密配合,构建起 ECU 乃至整车电子系统的 安全兜底防线。
本文将从以下四个方面展开:
- 看门狗的本质与 AUTOSAR WDGM 的设计理念
- WDGM 的工作机制与实现方式
- SYS 容错机制与 WDGM 的协同作用
- 案例解析:从单 ECU 到整车级别的容错与恢复
最后,我们会结合一些代码示例,展示如何在 ECU 软件中实现 WDGM 的典型用法。
01 看门狗的本质与 AUTOSAR WDGM 的设计理念
1. 看门狗的起源
在嵌入式系统里,看门狗(Watchdog Timer, WDT)是一种 硬件定时器,它会定期倒计时。如果软件没有在规定时间内“喂狗”(刷新计时器),看门狗就会认为系统异常,从而触发复位或安全动作。
这个机制最早用在航天、军工和工业控制系统,避免因为软件“卡死”而导致灾难。后来,随着汽车 ECU
的复杂度上升,看门狗成为 功能安全不可或缺的手段。
2. AUTOSAR 为什么要引入 WDGM?
单个硬件看门狗,只能检测“软件是否还在运行”;但在现代 ECU 上,运行 ≠ 正常。
例如:
应用任务陷入死循环,但仍在不断刷新硬件 WDT;某个关键通信超时,导致整车功能失效;软件分区间出现死锁,影响系统级容错。因此,AUTOSAR
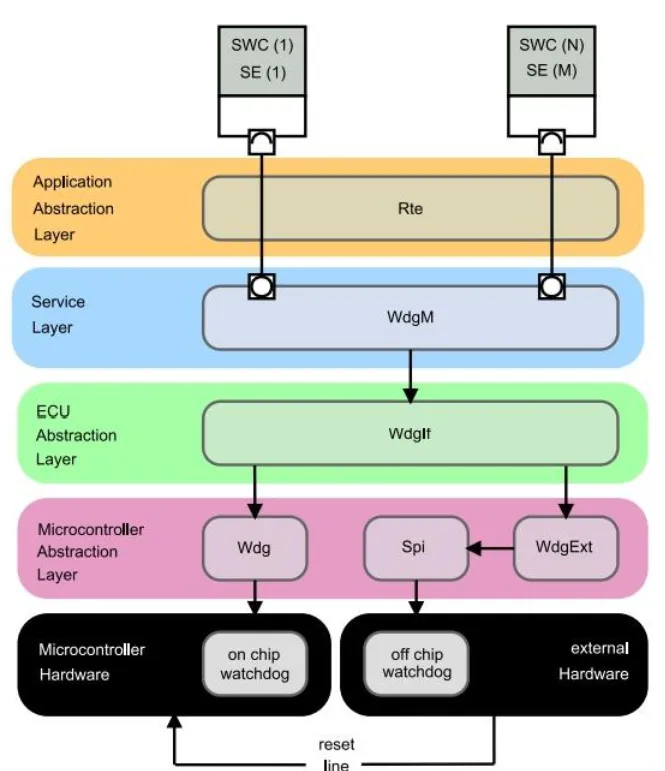
引入了 WDGM 模块:
I.抽象硬件 WDT,提供统一接口;
II.细粒度监控,不仅检测“是否运行”,还监控“是否按预期运行”;
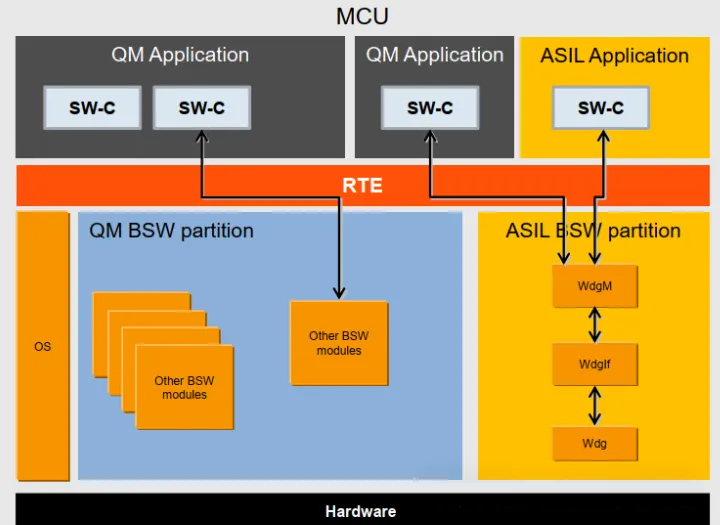
III.支持分层管理,上层 SWC、OS、BSW 都可以注册监控点。
一句话总结:WDGM 是 AUTOSAR 世界里的“软件看门狗调度器”。
02 WDGM 的工作机制与实现方式
1. 核心概念
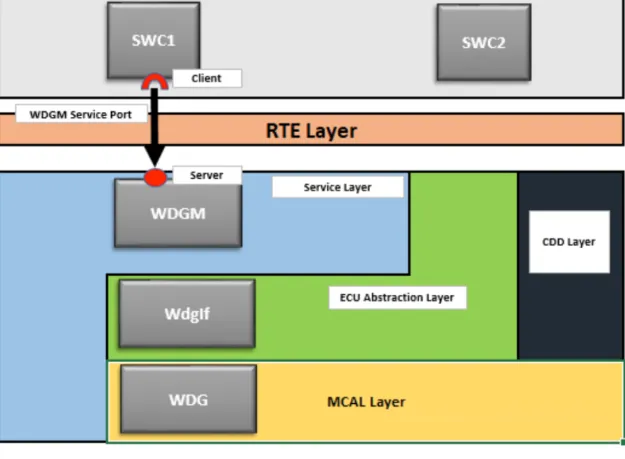
WDGM 的运行机制围绕以下几个核心点:监督实体(Supervised Entity, SE);每一个被监控的软件单元(任务/功能)。
触发条件(Supervision Cycle):
每个 SE 必须在规定的周期内进行“Alive Indication”(表明自己活着)。
监督模式(Supervision Mode)
不同运行模式下,监督条件不同,例如:正常模式、降级模式、启动模式。
反应策略(Reaction Strategy)
当 SE 没有按时喂狗,WDGM 会采取不同动作:记录日志、触发复位、进入安全状态。
2. 工作流程
WDGM 的典型工作流程如下:
- ECU 启动 → 初始化 WDGM;
- 每个 SWC/任务向 WDGM 注册为一个监督实体(SE);
- 在运行过程中,SE 定期调用 Wdgm_AliveIndication();
- WDGM 判断:
- 如果所有 SE 正常 → 喂硬件看门狗;
- 如果某个 SE 超时未响应 → 触发对应 Reaction。
这就像一个“看门狗的调度中心”,确保每个软件单元都在正确运转。
3. 简单的伪代码示例(不计字数)
Wdgm_RegisterSE(SE_ID_TASK1, SUPERVISION_CYCLE_10MS);
void Task1_MainFunction(void) {
...
Wdgm_AliveIndication(SE_ID_TASK1);
}
|
03 SYS 容错机制与 WDGM 的协同作用
仅仅有 WDGM,还不足以实现真正的系统级安全。因为:1.WDGM 只能检测到“任务异常”,但无法决定“如何恢复”;2.不同
ECU 的故障严重性不同,有些可以复位,有些必须进入降级模式;3整车系统需要跨 ECU 的容错协调。
这就需要 SYS 层的容错机制。
1. SYS 层的作用
SYS 并不是 AUTOSAR 的单一模块,而是指 整车 ECU 系统的容错逻辑集合,通常包括:
故障检测与隔离(FDI):识别异常 ECU,隔离其影响;
容错状态机:系统根据故障等级,切换到安全运行模式(如 Limp Mode);
冗余机制:关键 ECU 双机热备或跨域冗余;
通信容错:当某个 ECU 下线时,其他 ECU 通过网关进行补偿。
2. WDGM 与 SYS 的配合
WDGM 提供基础监控:发现哪个任务/ECU“没响应”;
SYS 决策容错策略:是复位?还是降级?还是启用冗余?
功能安全链路:与 ISO 26262 ASIL 需求结合,实现“检测-报告-反应”闭环。
3. 示例场景
假设制动 ECU 的任务“Brake_Torque_Calc”超时:
WDGM 发现任务没有按时 Alive Indication;
WDGM 上报 SYS;
SYS 容错机制触发:
如果在城市工况 → 触发 ECU 复位;
如果在高速工况 → 进入“安全制动模式”,保持最小制动力。
|
04 从单 ECU 到整车级容错
1. 单 ECU 层面
在单个 ECU 内,WDGM 能保证:
- 每个周期任务都在正常运行;
- 如果某个任务“卡死”,触发复位或安全状态。
- 这保证了 ECU 不会因为单个软件异常而完全瘫痪。
2. ECU 间的系统容错
但在整车范围内,仅靠复位并不总是最佳选择。比如在自动驾驶 ECU 中,瞬间复位会导致传感器数据丢失。
这时候,SYS 的作用就体现出来:冗余 ECU 可以快速接管任务;跨域容错逻辑 可以让车辆平稳过渡,而不是直接“黑屏”。
3. 功能安全案例
在 ISO 26262 的要求下:ASIL-D 级别的功能(如制动、转向)必须具备 双重看门狗 +
系统容错;WDGM + SYS 构成的组合,成为实现安全目标的核心手段。
05 总结
在汽车 ECU 的软件架构里,WDGM 和 SYS 是最后的守护者。WDGM 提供细粒度的任务监控,确保每一个软件单元都在按预期运行;SYS
提供系统级的容错策略,确保 ECU 与整车在异常时能进入安全状态;两者结合,形成了“检测—隔离—恢复”的闭环,是实现功能安全和系统可靠性的关键。
随着 软件定义汽车(SDV) 的推进,ECU 数量更多、任务更复杂,WDGM 与 SYS 的重要性只会越来越高。未来,我们甚至会看到:看门狗不再只是“死机复位”,而是主动参与“智能容错”,成为车载操作系统的核心模块之一。
| 






 订阅
订阅