| 编辑推荐: |
本文主要对商用车新一代电子电气架构的设计进行了思考。希望对您的学习有所帮助。
本文来自于汽车电子电气架构工程师,由火龙果软件Linda编辑、推荐。
|
|
一、前言:
商用车市场当前具有如下发展趋势:
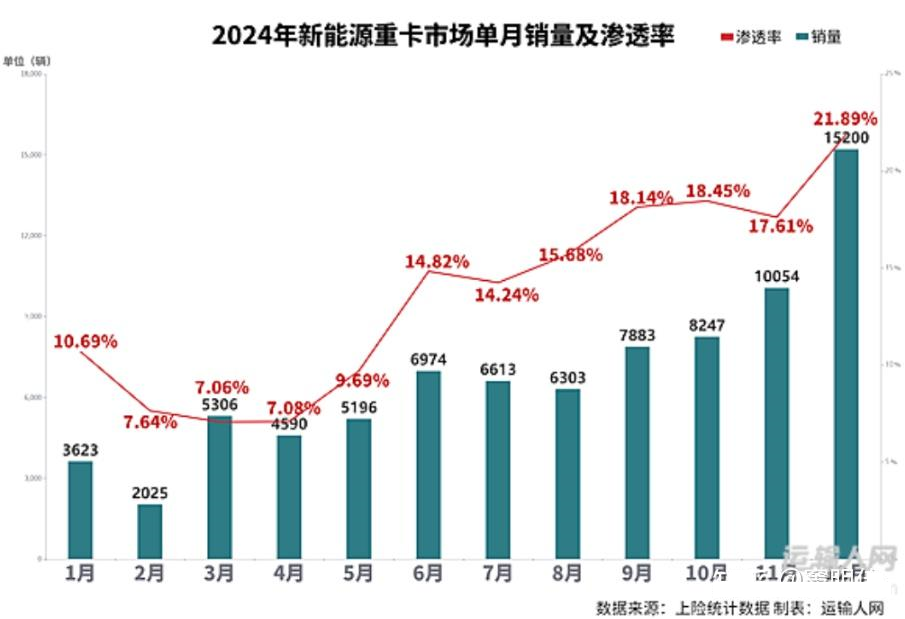
1.1电动化
在政策推动、运营成本降低、市场竞争等因素驱动下新能源重卡市场销量及渗透率逐年升高,特别在港口、矿区、城市物流等封闭或短途运营场景,新能源重卡已逐步替代燃油重卡,在电动化趋势下,由传统发动机/变速箱技术的竞争,转向高效电驱系统、高集成度电控系统、高能量密度及安全的电池技术竞争;

1.2智能化
卡车编队模式在某些场景下实现了商业闭环,高级别自动驾驶对整车产品和技术带来巨大的变革影响,车辆从失效安全(Faile
Safe)转向失效可运行(Fail Operation),从而对车辆的驱动系统、制动系统、转向系统提出了安全冗余需求。

图2:卡尔动力在鄂尔多斯等部分区域实现了常态化编队运营
1.3网联化
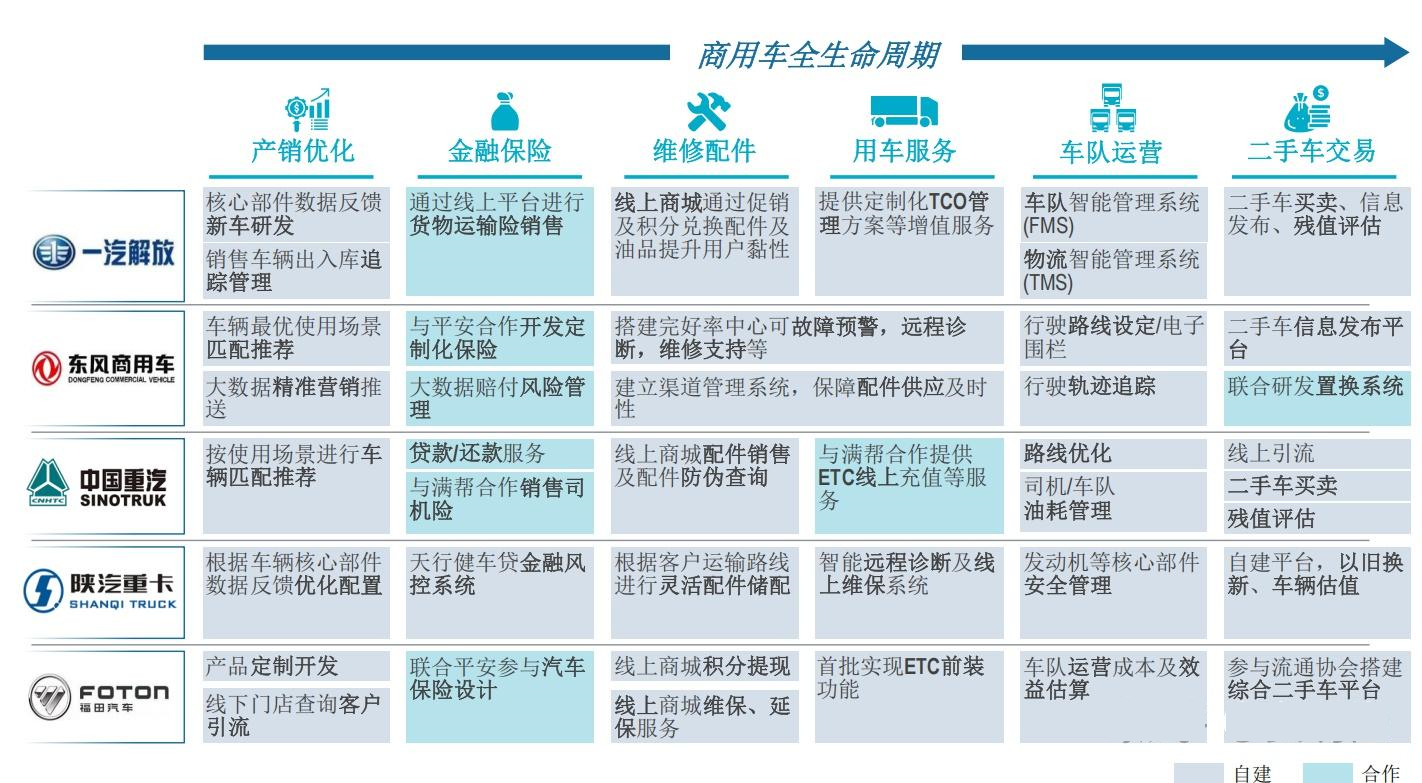
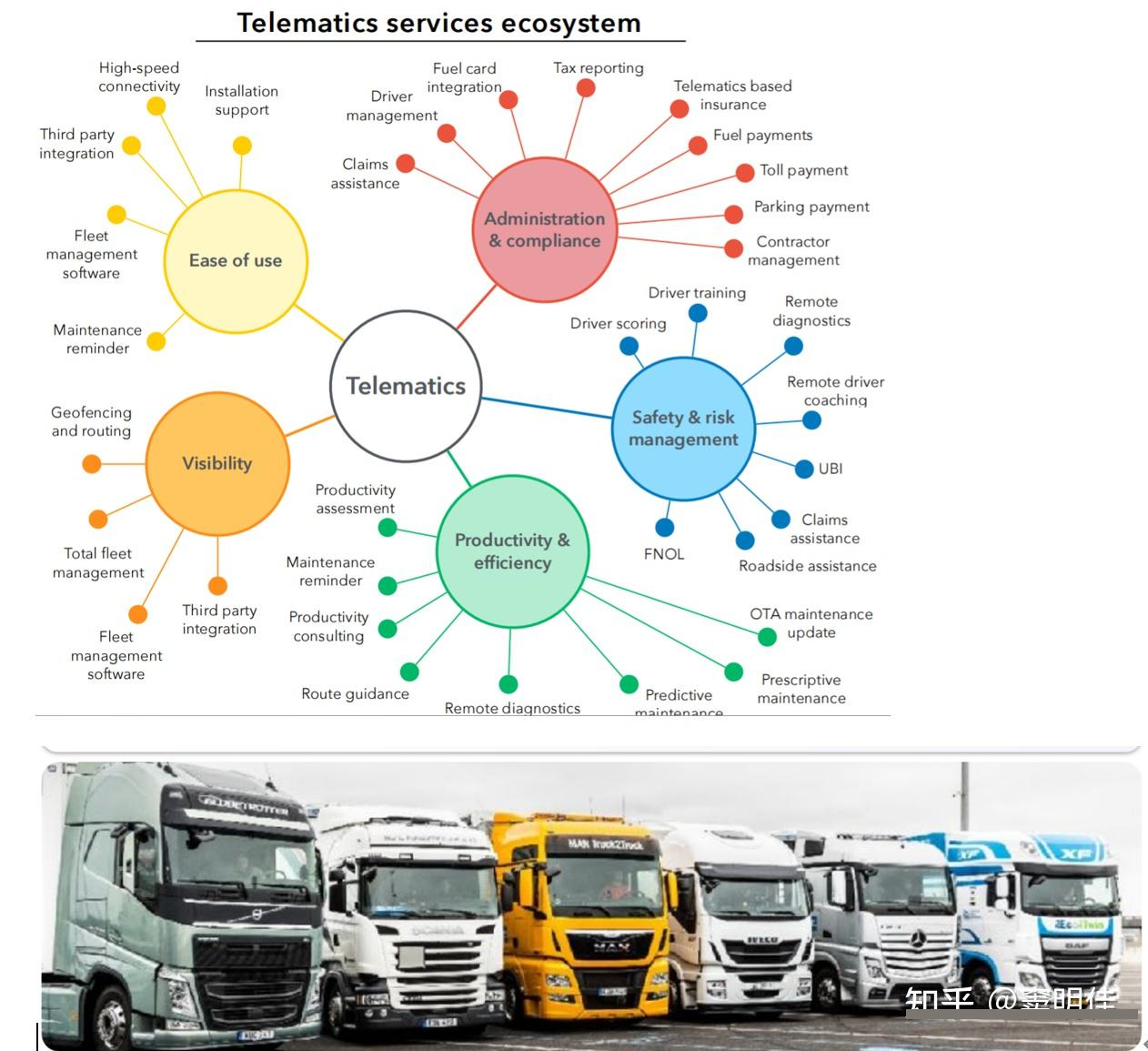
乘用车车联网主要关注影音娱乐、驾驶辅助、个性化体验、人机交互、AI语音助理、车辆安全等,相较于乘用车车联网,商用车作为生产工具,其主要功能包含能耗管理(油耗、电耗、氢耗)、司机考勤、车辆调度管理、车辆监控预警、维修保养、车辆跟踪等,可为司机、车队和企业带来实际的降本增效,挖掘商用车潜在的TCO价值,盈利模式更加清晰。
资料来源:案头研究,专家访谈;罗兰贝格
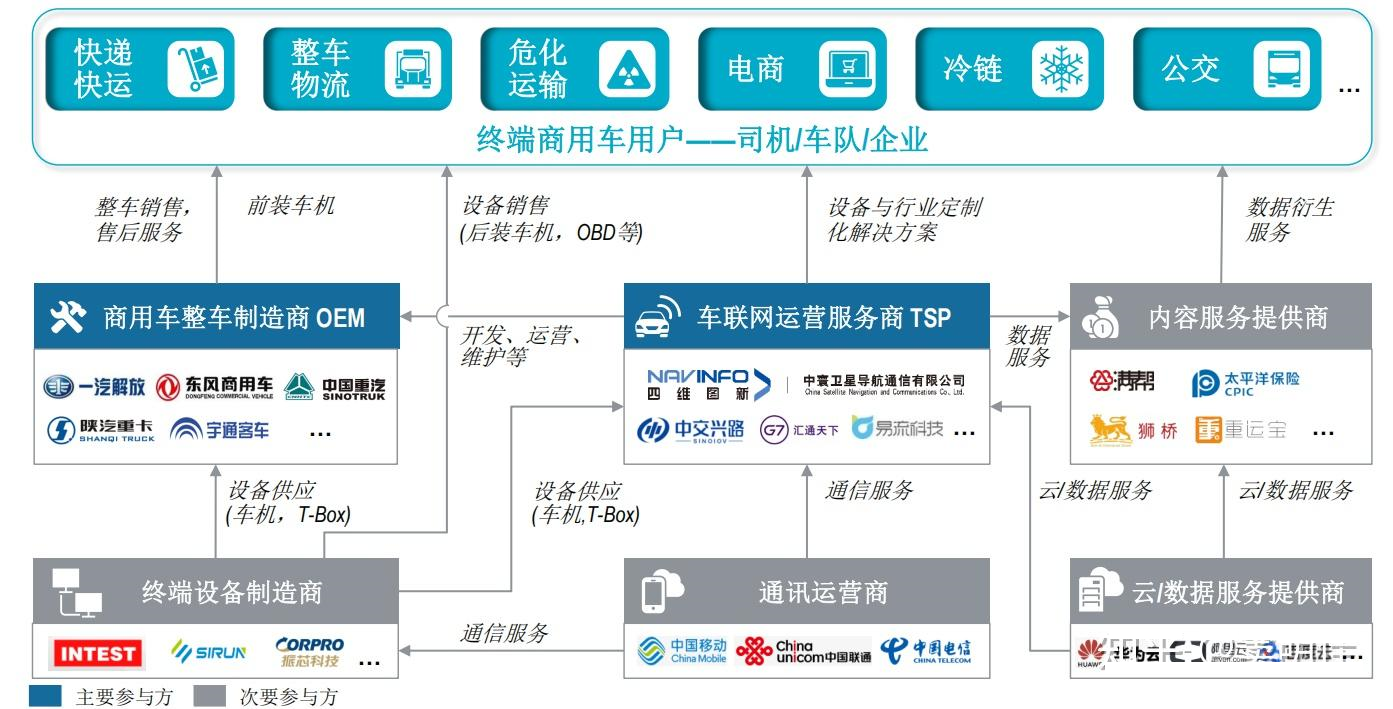
围绕商用车全生命周期服务,主要参与方包括商用车OEM、终端设备制造商、通讯运行商、云/数据服务提供商、车辆网运营服务商以及第三方内容服务提供商,作为商用车OEM需要构建车辆开放平台,通过Vehicle
API从而提供数据服务给第三方内容服务商,以在车辆后市场服务中获取利润。
资料来源:案头研究,专家访谈;罗兰贝格
二、商用车电子电气架构设计原则
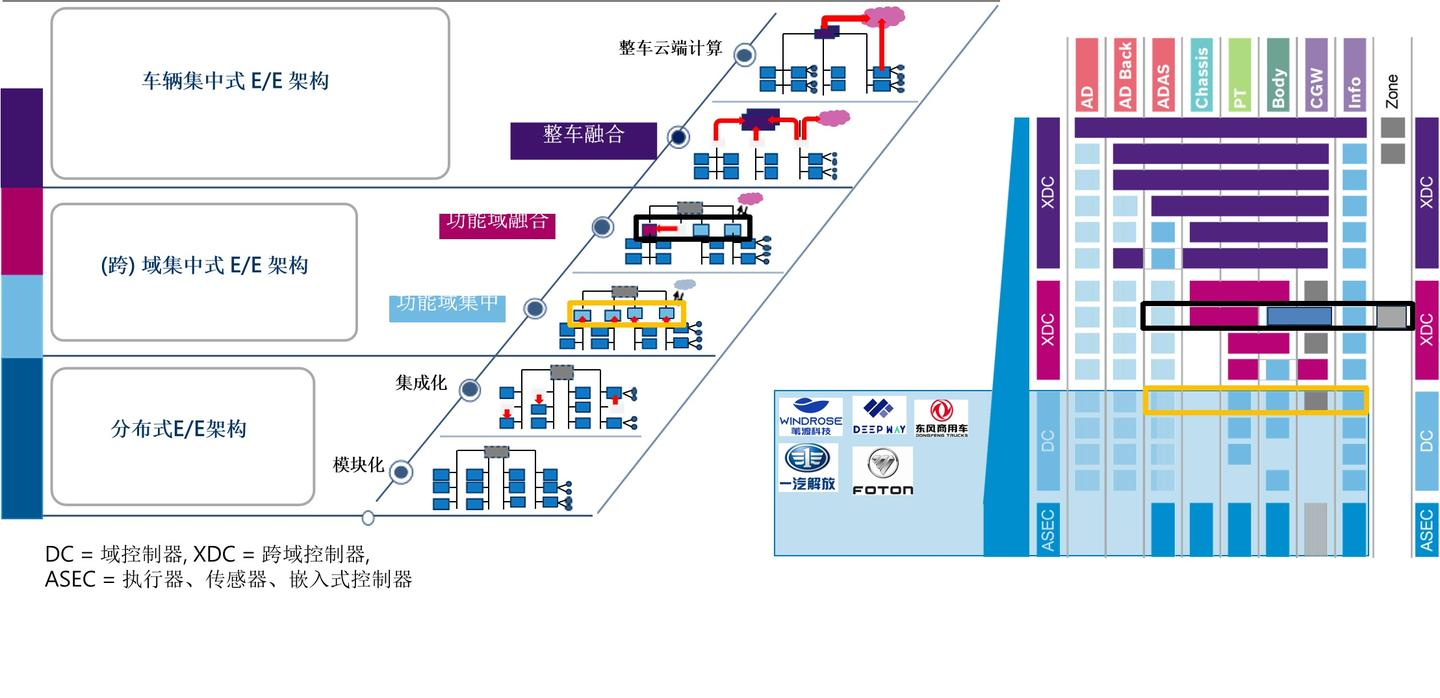
在上述电动化、智能化、网联化趋势下,当前商用车也正从分布式E/E架构、向域集中式E/E架构演进,同时部分新势力商用车企业已从功能域集成向跨域融合以及区域融合演进,但是不同企业会选择不同的功能集中及融合方案,本文想在此探讨企业如何选择适合自己的架构拓扑。
2.1 物理解耦
商用车驾驶室通常通过悬置连接底盘车架,目前商用车市场情况,一款驾驶室开发出来以后通常要用很多年(甚至10年),然而底盘却需要根据不同的车辆使用场景进行定制开发,例如矿区、港口、环卫、快递、快运等,不同的场景对于底盘的轴距、驱动功率、驱动形式(4x2、6x4)都有不同要求,并且同一款驾驶室会适配不同的动力总成如纯电动、燃料电池、天然气动力、柴油等,因此为了保证不变与异变部分的解耦,在重卡电子电气架构设计时要考虑驾驶室与底盘在功能和物理上的解耦;

因此商用车与乘用车区域控制器布置不同,商用车应该上下布置区域控制,即在驾驶室布置座舱区域控制器,在底盘布置底盘区域控制器,座舱区域控制器可承担驾驶室相关设备控制,如灯光、雨刮、门锁、车窗、座舱、空调、PEPS、蓝牙等,同时可根据公司的产品策略,考虑将车身控制逻辑BCM部署在座舱区域控制器,还是整车控制器VDC,而底盘区域控制器可考虑集成底盘灯光控制(如倒车灯、制动灯、雾灯、侧标志灯、侧转向灯等)、热管理系统(电驱热管理、电池热管理、高压部件热管理)、底盘I/O
Hub(储气筒气压传感器)、底盘配电、TPMS等;

2.2 模块化
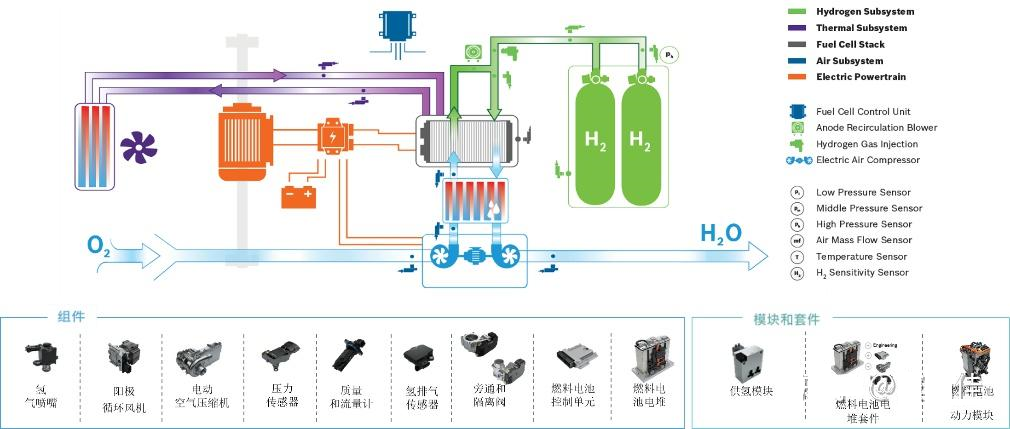
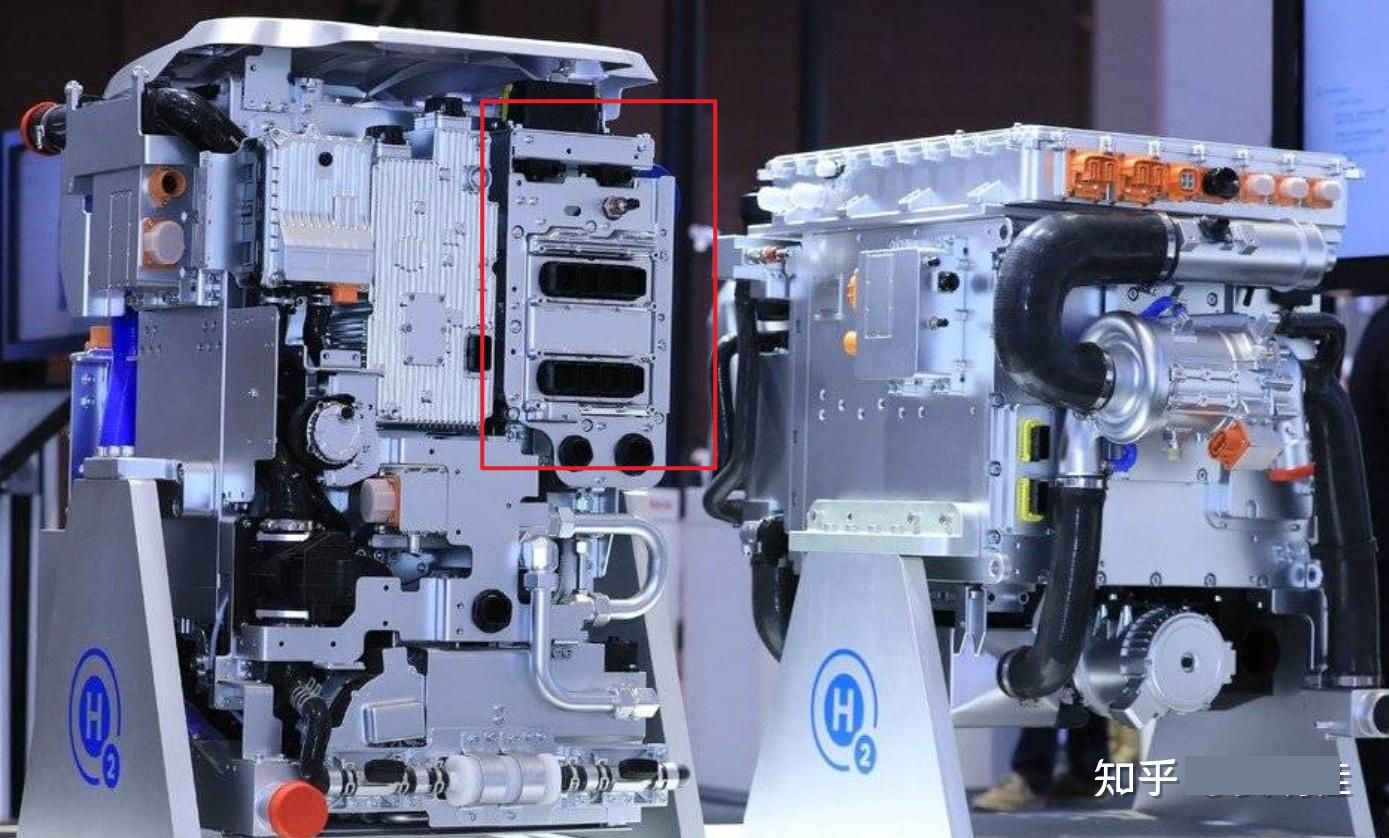
例如燃料电池系统包含大量的传感器(压力传感器、空气流量传感器、温度传感器等)及执行(氢气喷嘴、空压机、旁通阀、氢气循环泵、水泵等),因此对于燃料电池控制器FCU来说,其需要一个Pin脚资源丰富的硬件,从降低线束复杂度的角度考虑,燃电系统控制器FCU应尽量安装在电堆附近,并和电堆一起作为标准化模块,因此在动力域功能融合时不建议将FCU集成进动力域控PCU中,而作为单独的控制器,并保留其核心控制功能(进气控制、氢气控制、氢堆功率控制、电堆热管理控制等)。
2.3 功能集中化
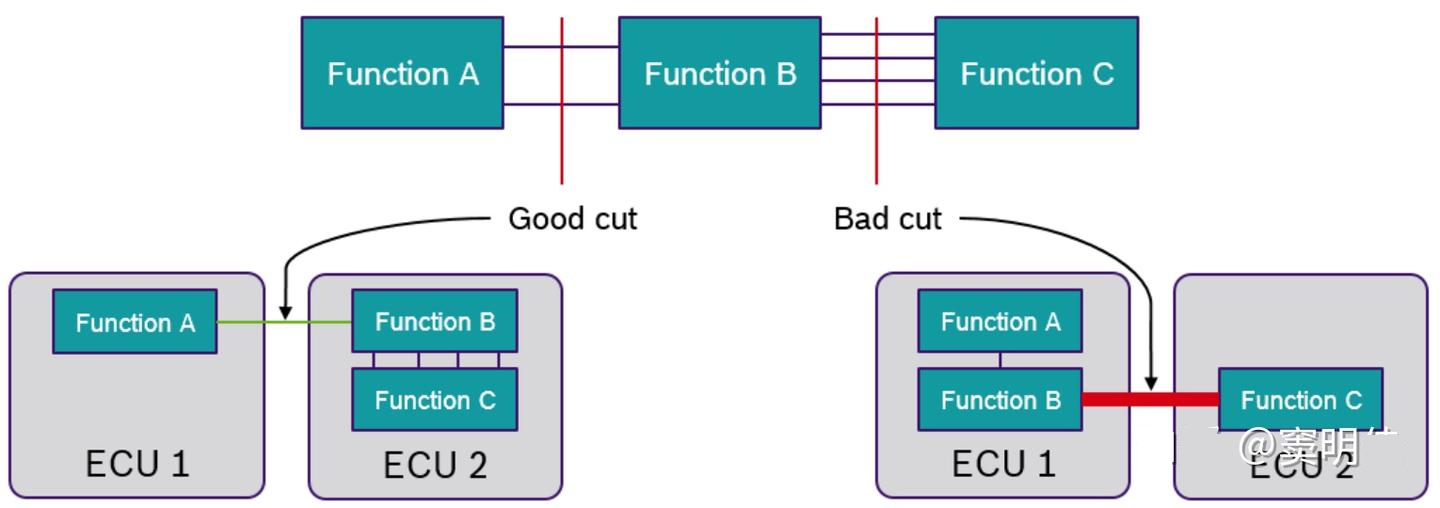
我在这里想说的是功能集中化的目标是要降低跨ECU交互的复杂性以及时延,以提高车辆的性能,并同时满足功能软件快速迭代的需求,而不是单纯的控制器融合,以缩减控制器数量为目的,把相互之间联系并不密切的功能放在同一个硬件上,表面上集中度更高,实际带来了软件开发集成的复杂性,同时成本上比采用相对标准化的控制器更高;
以对新能源商用车能耗影响较大的串联式制动能量回收功能为例,其功能涉及多个控制器之间的高频扭矩交互,首先整车控制器VCU需要结合动力电池的SOC以及可充电能力、电机的最大/最小可用扭矩、整车用电器的功率消耗等计算能量回收可用电扭矩,电控制动系统EBS接收驾驶员的制动踏板位置计算期望减速度,结合当前VCU发送的能量回收可用电扭矩,制动I曲线等计算前轴/后轴的制动力分配,同时优先将后轴的制动力转换为电机的扭矩请求,并将电机扭矩请求发送给驱动控制单元,对于具有双电机/三电机的驱动系统,驱动控制单元将接收到的电机回馈扭矩请求分配到不同的电机控制器,电机控制器控制电机进行制动,同时在电制动的过程中,驱动控制单元需要实时将实际执行扭矩反馈给EBS,在电制动不足时气制动会立即进行补足,从而满足驾驶员制动减速度的需求,为了满足实时性要求,以上扭矩交互报文的周期通常在10ms,对于J1939
500bps的网络带宽来说有点不堪重负,同时因为传输链路过长,在一些极端场景(大油门加速然后切制动)电机回馈扭矩达到目标扭矩时间无法满足制动性能需求,通常会导致EBS关闭串联式制动能量回收功能,全部由气制动来完成制动过程。
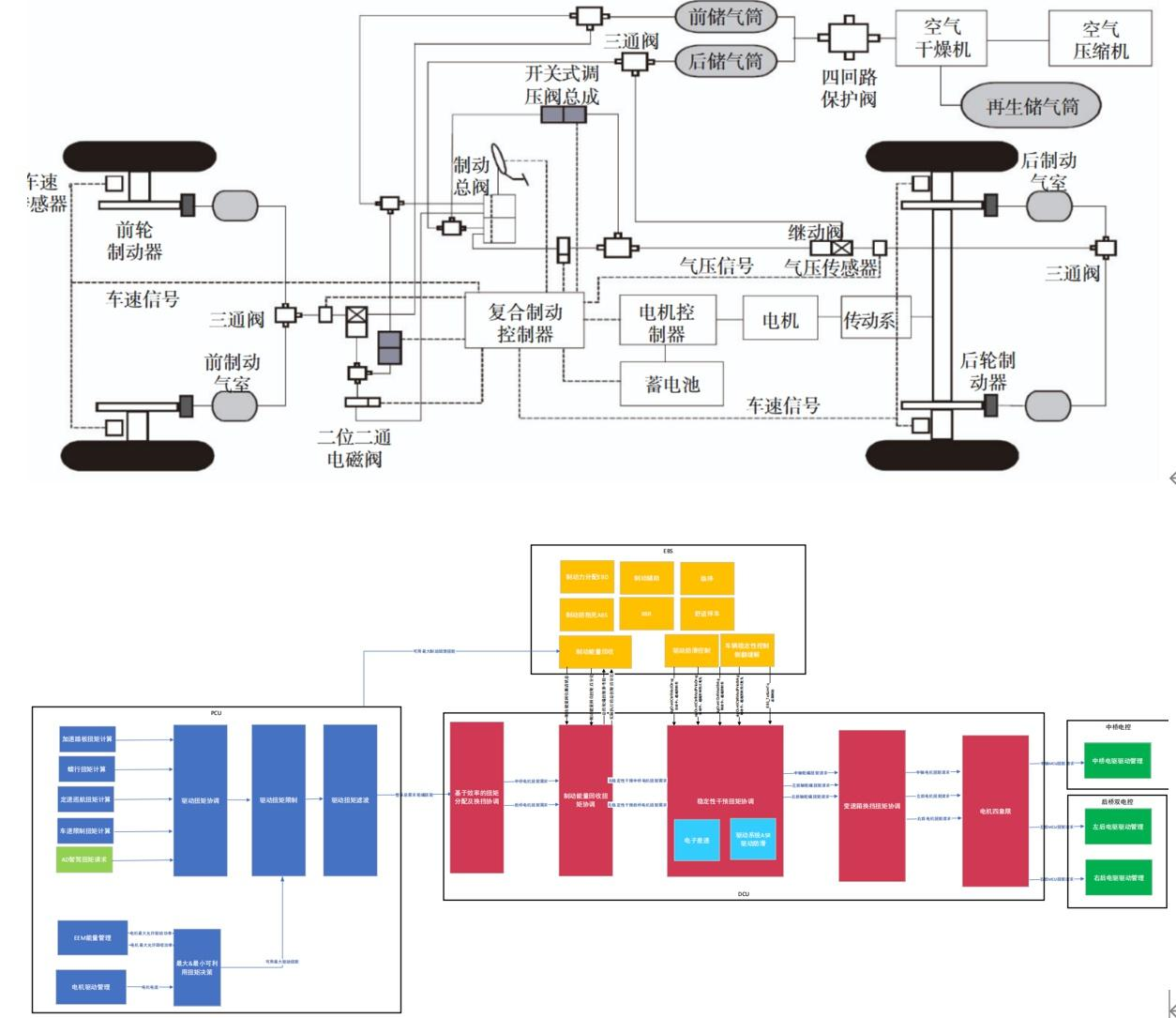
因此对于上述串联式制动能量功能来说,如果能够实现纵向驱动、制动的融合控制将是有益的,对于主机厂来说在目前集中式架构趋势下如果能够将能量管理、扭矩计算、扭矩协调、多电机扭矩分配、多变速箱档位控制、制动能量回收控制、ESC等功能集成进车辆运动域控制器VMC(Vehicle
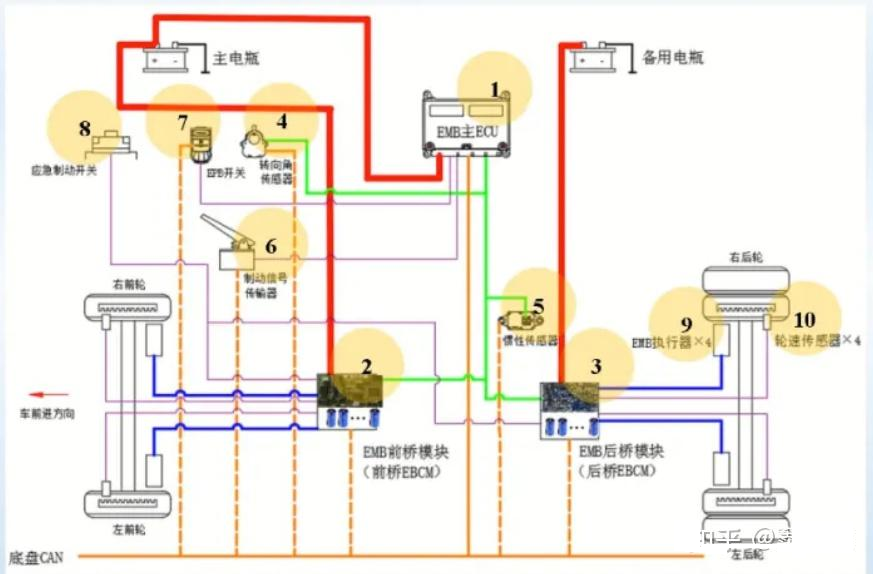
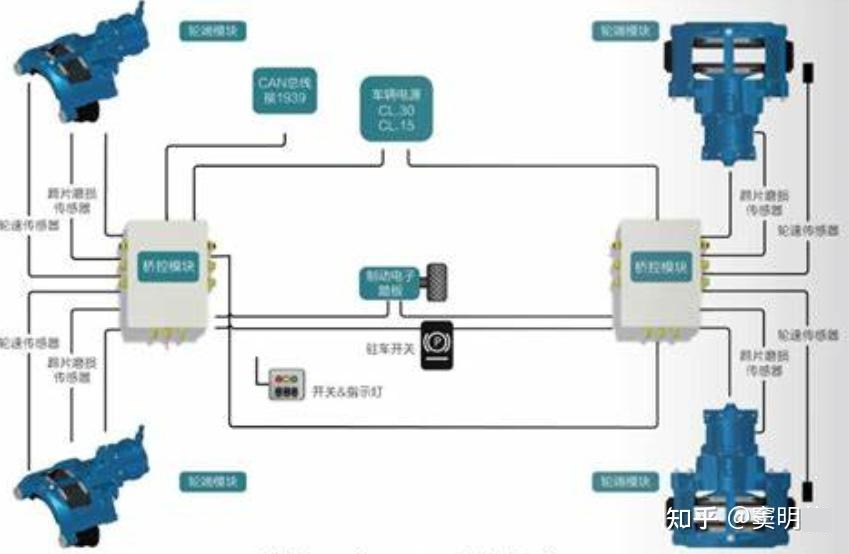
Motion Control)将对车辆能耗降低、动力学性能提升(如VDC、TCS、ROP)等带来价值,在传统液刹、气刹制动的时代,制动系统的控制由Tier1牢牢把控,主机厂很难在底盘域上实现整合集成,但是在下一代电子制动系统EMB
(Electronic Mechanical Brake)到来时,其主控ECU可以融合进VMC,而桥控模块、轮端执行电机可由供应商进行开发;
2.4 开放平台构建
如1.3章节所说,围绕商用车全生命周期服务,商用车车联网的盈利模式更加清晰,但是如果每家OEM都构建自己封闭的生态系统,投入与产出将不对称,同时对于车队运营商来说管理来自多个品牌的车辆将是困难的,不同品牌的车型其车联网设备、可提供的车辆数据都是不一样的,如果要将不同品牌的车辆统一接入自己的车队管理系统FMS(Fleet
Management System)将需要带来大量的重复开发工作,因此构建统一的数据共享标准,通过开放平台将车辆数据共享给车队运营商及第三方内容服务商将是有益的。
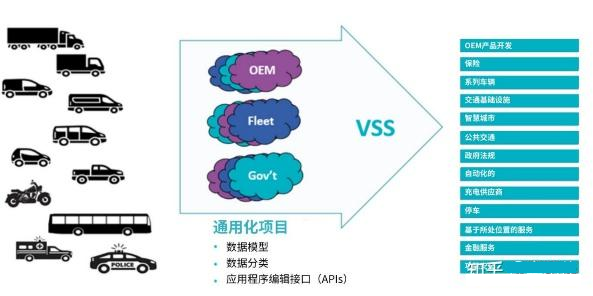
为了达成上述目标COVESA组织推出了VSS(Vehicle signal Specification),该规范旨在构建一个开放数据模型,旨在规范车辆数据(如车辆速度、车辆胎压、车内照明灯),其核心理念在于提供一种易于理解且可在各种环境中被广泛使用的规范,减少车辆数据的碎片化,促进商用车整个生态系统的发展。
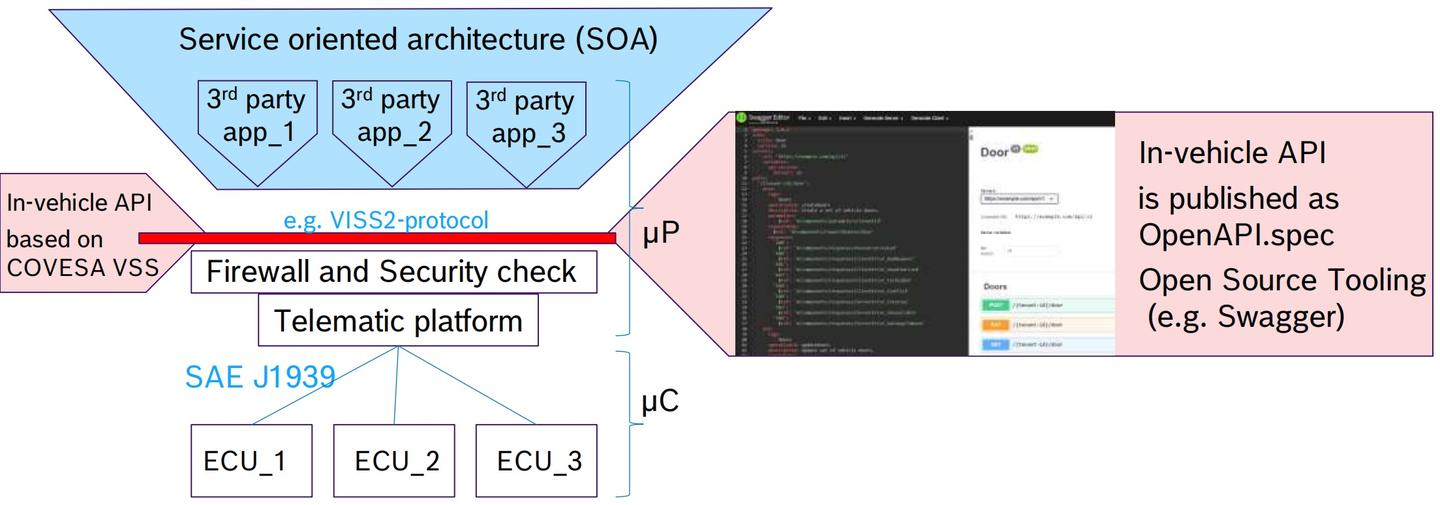
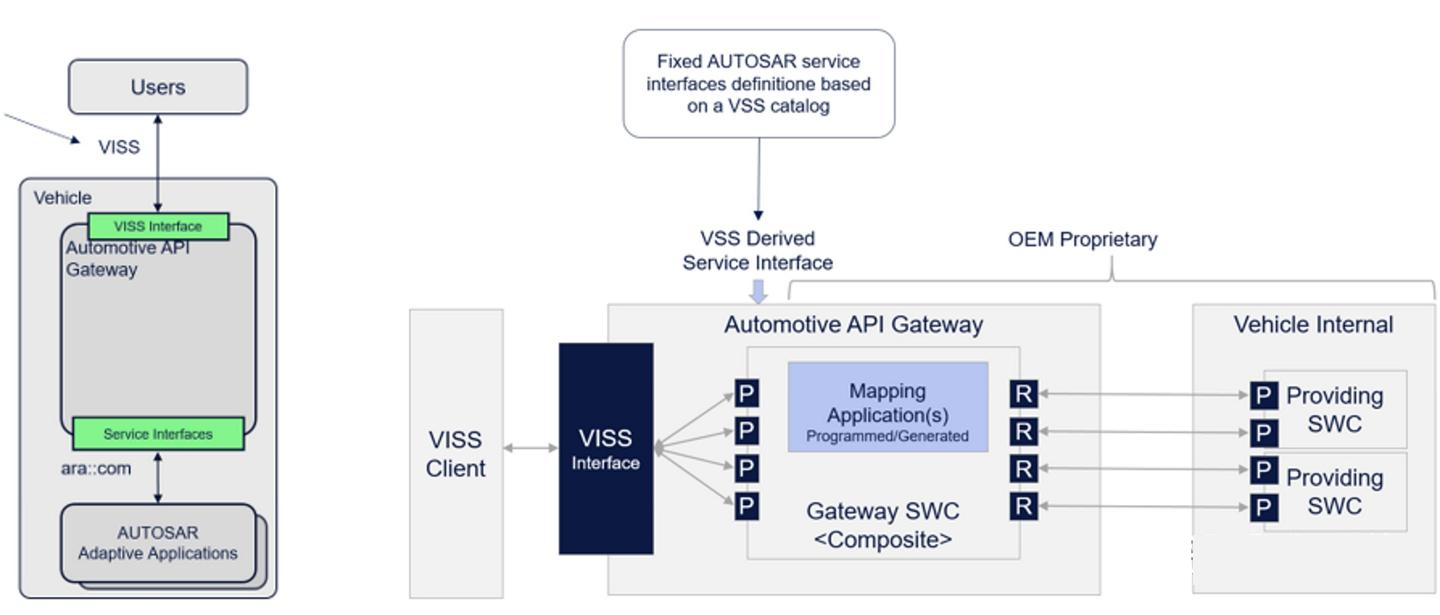
而实现COVESA VSS当前还没有广泛应用的成熟方案,AUTOSAR组织在2024年发布了Adaptive
AUTOSAR R24-11,AUTOSAR Automotive API 也在该规范中发布,AUTOSAR
Automotive API实现了将Adaptive Application的服务接口内容转换成标准的VISSv2(整车信息信号规范)接口的功能,在架构规范时可将Automotive
API Gateway部署在高性能控制器上,如整车控制器VDC或高性能中央网关上,
由以上可知,对于商用车的整车控制器VDC通常不会融合底盘相关控制如VCU、TMS等,而更多是承担整车的数据中心、信息中心、计算中心,可部署Ethernet
GW、VMM、OTA Master、IDPS、RVDC、Data Collect、Automotive
API Gateway等功能。
2.5回归生产工具属性
与乘用车将座舱定义为“第二起居室”、成为懂情感、会思考的AI智能体不同,商用车更多的还是生产工具,作为生产工具其最核心的功能是提高生产效率、降低生产成本,从而推动生产力的发展,因此在进行智能座舱、智能驾驶的设计时,还是要回归商用车作为生产工具的属性,座舱影音娱乐、情感交互、个性化定制相关的功能在商用车上并不是强需求,同时对于智能驾驶,在满足法规安全需求后,若不能真真切切的减员增效,其过多的辅助驾驶功能也不是必要的,除非像1.2章节所说的实现“技术-资本-场景”的商业闭环。
三、总结
本文根据目前商用车市场发展趋势,结合商用车自身属性,从物理解耦、模块化、功能集中化、开放平台构建、回归生产工具属性等维度,对商用车新一代电子电气架构的设计进行了思考,受制于自身知识范围有限,文中观点不免偏颇,望批评指正。
| 






 订阅
订阅