| 编辑推荐: |
本文主要介绍 在AUTOSAR 通信栈中,PduR(PDU Router)、Com、CanIf(CAN
Interface)和 CanDrv(CAN Driver)四个模块的设计动机、工作机制和工程价值,希望对您的学习有所帮助。
本文来自于汽车软件大本营,由火龙果软件Linda编辑、推荐。 |
|
前言
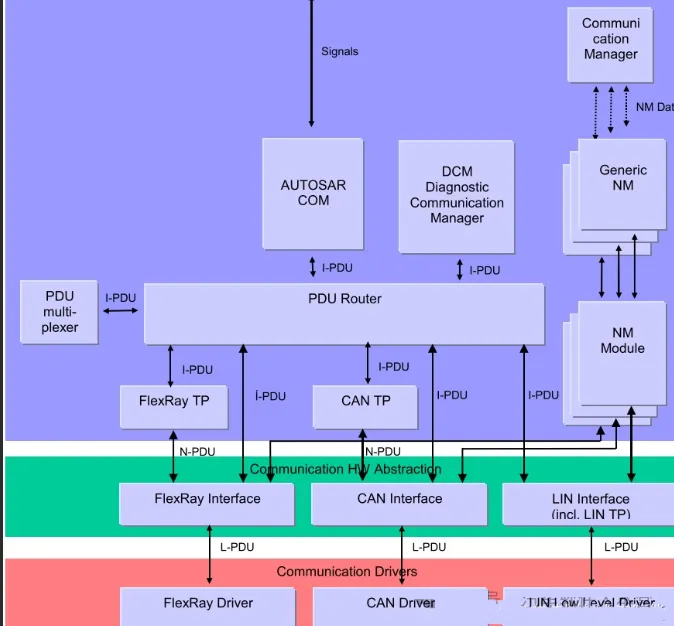
在 AUTOSAR 的通信栈中,PduR(PDU Router)、Com、CanIf(CAN
Interface)和 CanDrv(CAN Driver)是最基础、最关键的模块,它们分别承担着数据路由、信号建模与打包、接口抽象以及底层驱动的职责。理解这四个模块的设计动机、工作机制和工程价值,不仅是掌握
AUTOSAR 的前提,也是进行 ECU 软件架构设计和调试不可或缺的能力。
01
PduR 模块---》通信的路由中枢
PduR,即 PDU Router,从名字便可看出它的主要职责是实现
PDU(Protocol Data Unit)的路由。简单来说,它就是通信栈中的“交换机”。
在 AUTOSAR 体系下,数据往往不是单一模块之间的直接传输,而是可能跨多个通信协议栈和应用模块。比如,一条来自应用层的诊断请求需要下发到
CAN 总线,也可能通过以太网传输到另一个 ECU;而同一个 ECU 内部的不同软件组件(SWC)可能订阅同一信号。若没有
PduR 这样的集中式路由模块,数据路径将极为复杂,且不具备可维护性。
PduR 的价值在于它彻底解耦了“谁发送数据”和“通过什么通道发送数据”之间的关系。
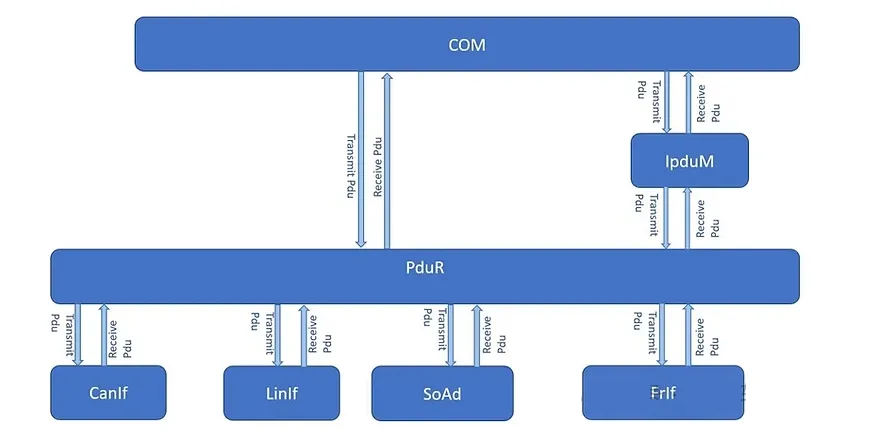
上层应用只需交付一个 PDU 给 PduR,至于该 PDU 是否通过 CAN、LIN 还是以太网发送,完全由配置文件决定。这种机制使得通信的迁移和扩展变得异常容易。比如,早期项目可能基于
CAN 实现,后续演进为 CAN FD 或以太网时,应用层逻辑几乎无需修改,只需要在 PduR 的配置层调整路由规则即可。
工程实践中,PduR 的路由策略往往涉及到单播、广播、甚至跨协议的路由。对于跨域架构而言,PduR
更是发挥关键作用。例如,诊断通信可能从 UDS 服务请求经过 PduR 转换成 CAN 报文,最终由
CanIf 和 CanDrv 发送出去。若另一个 ECU 通过以太网接收同样的请求,则 PduR 会完成对应的转发。这种灵活性正是
AUTOSAR 架构相较于传统嵌入式开发的一大优势。
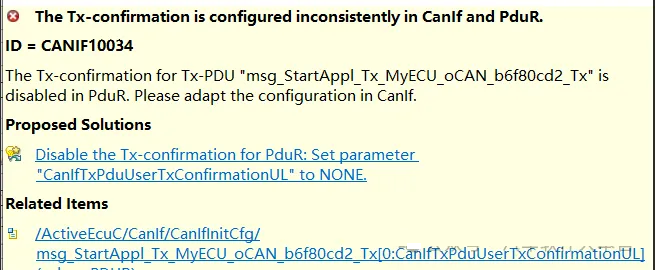
实际开发中,PduR 配置极易出现错误,尤其是在多路复用的情况下。一旦路由关系配置有误,就可能导致
PDU 无法到达目标模块,或者出现资源占用冲突。此外,PduR 本身作为“中间层”,需要保证转发延迟尽可能低,以维持
CAN 或以太网通信的实时性。开发人员在实践中,往往需要通过工具链(如 DaVinci Configurator
Pro)来严格校验 PduR 配置,并在 MIL/SIL 环境中验证其逻辑正确性。
02
Com 模块---》从信号到 PDU 的抽象
相比 PduR 的路由作用,Com 模块的意义在于抽象化。应用软件组件(SWC)往往更关心逻辑信号,而不是底层通信
ID。比如,动力域控制器需要获取“车速信号”,它只想读到逻辑上的 VehicleSpeed,而不希望直接面对“CAN
报文 0x123 的第 5–16 bit”。如果没有 Com,SWC 就必须和 CAN ID、位偏移、字节序等底层细节耦合在一起,维护性极差。
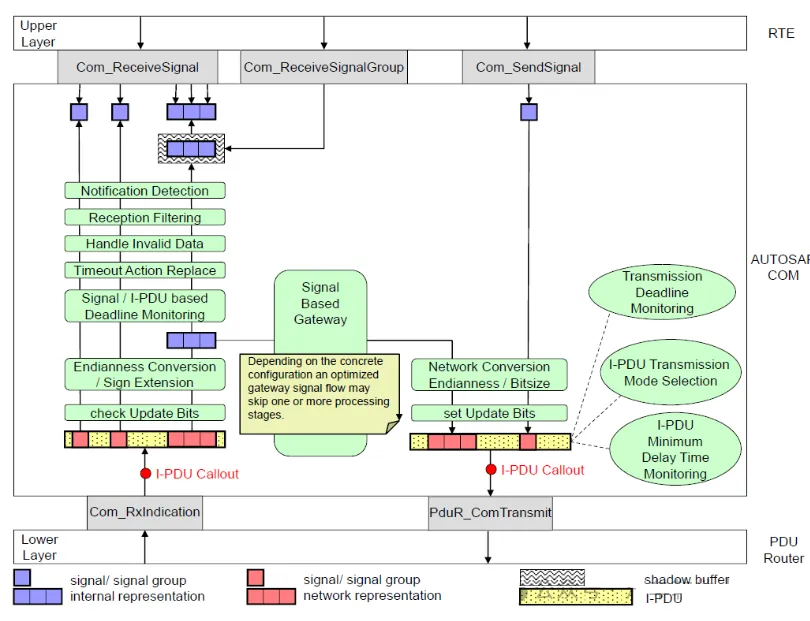
Com 的核心功能就是屏蔽这些底层细节,它提供了逻辑信号建模的机制。应用开发人员在 SWC 中操作的是信号,而
Com 模块则负责将这些信号映射到具体的 PDU 中。这里最复杂也最具工程价值的地方在于信号打包与解包过程。
打包机制中,Com 需要处理各种复杂的 bit-level 对齐问题。
例如,一个 3bit 的信号和一个 11bit 的信号需要打包在同一个 PDU 中,如何避免填充位的浪费、如何保证字节序的正确性、如何保持跨
ECU 之间的一致性,都是工程中的难点。AUTOSAR 提供的 Com 配置工具往往可以自动计算这些
bit 映射,但开发人员仍需理解其背后的逻辑,才能在出现信号更新丢失或边界错位时迅速定位问题。
Com 还提供多种传输模式。典型的有周期触发、事件触发和混合触发。
比如,车速信号通常需要周期性发送以保证驾驶员仪表显示的实时性,而制动信号则更适合采用事件触发,因为只有在制动状态发生变化时才需要传输。如果这两者混合配置,Com
可以实现“周期发送车速 + 事件触发制动信号”的组合,从而兼顾实时性与带宽效率。
另一个重要机制是群组信号。
以四轮轮速为例,如果每个轮速都作为独立 PDU 发送,将会显著增加总线带宽开销。通过群组信号,Com
可以将四个轮速信号打包到同一个 PDU 中,一次性发送给目标 ECU,从而有效减少通信负载。这种设计在自动驾驶场景下尤为重要,因为自动驾驶
ECU 需要处理大量传感器数据,带宽优化成为关键。
在实际项目中,Com 常见的工程问题包括信号更新丢失、边界对齐错误、以及周期与事件冲突等。解决这些问题的有效方式是通过
MIL/SIL 回归测试,利用黄金参考数据检查 Com 的打包是否符合预期,并在早期发现问题。
03
CanIf 模块--》通信接口的抽象屏障
CanIf,即 CAN Interface,它的角色介于 Com/PduR
与底层驱动之间。它提供了一层抽象,使上层模块不需要关心具体的硬件实现细节,只需要通过统一的 API
与 CAN 网络交互。
CanIf 的价值主要体现在三个方面。
它实现了 PDU 与 CAN 报文的映射:
对于上层而言,传输的单位是 PDU,而底层驱动只能处理 CAN 帧。CanIf 负责将 PDU 分割或封装为
CAN 帧,并传递给 CanDrv 发送。接收时,它会将来自 CanDrv 的 CAN 帧解析为 PDU,再交付给上层模块。
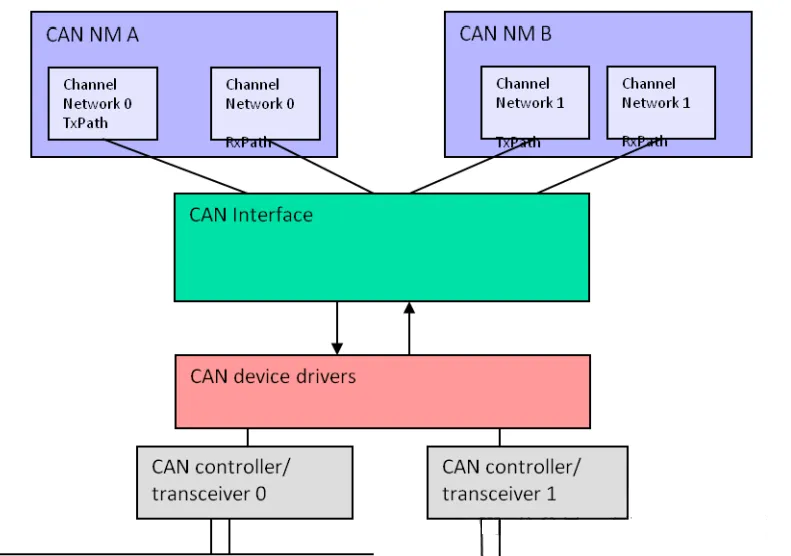
CanIf 负责管理 CAN 通道和控制器的状态:
CAN 控制器可能存在启动、停止、睡眠、唤醒等多种状态,CanIf 需要负责在合适的时机切换状态,并提供
API 供上层查询和控制。这一机制对于整车低功耗管理尤为重要。例如,当整车进入休眠模式时,CanIf
需要确保控制器关闭以降低功耗,而一旦有网络唤醒信号出现,则要迅速恢复通信。
CanIf 还提供了错误管理机制:
CAN 总线通信并非百分之百可靠,可能存在丢帧、仲裁失败或总线错误。CanIf 会通过回调函数通知上层模块这些错误信息,以便系统采取相应措施。这一机制在功能安全场景下尤其关键。比如,当制动
ECU 发现总线错误过于频繁时,可以触发冗余机制来保障安全。
在实际工程中,CanIf 的调试难点在于状态切换与回调处理。若状态机设计不合理,可能导致 CAN
控制器无法被正确唤醒,或者在错误恢复时陷入死循环。此外,CanIf 与 PduR/Com 的接口配置往往复杂,稍有疏忽就可能出现
PDU 无法正确传输的问题。因此,工程团队通常会借助 CANoe 或 CANalyzer 等工具对
CanIf 的行为进行仿真和验证。
04
CanDrv 模块--》底层驱动的核心
CanDrv,即 CAN Driver,是整个通信栈中最贴近硬件的一层。它直接与 CAN 控制器交互,负责具体的报文收发、滤波和中断处理。
在 AUTOSAR 的设计中,CanDrv 必须对上层提供统一的 API,而其底层实现则依赖于具体的硬件平台。例如,Infineon
的 TC397、NXP 的 S32K144 等芯片都内置了 CAN 控制器,但寄存器结构、缓冲区机制和中断策略各不相同。CanDrv
的任务就是屏蔽这些差异,为上层提供标准化接口。
CanDrv 的关键功能之一是硬件滤波管理。由于 CAN 总线上可能存在成百上千条报文,而某个 ECU
只需要其中的几十条,CanDrv 必须依赖硬件滤波器来筛选所需报文。如果配置不当,可能导致 CPU
需要处理过多无关报文,造成性能下降。另一个关键点是中断机制。CAN 报文收发通常通过中断驱动,CanDrv
需要在高并发情况下保证中断响应的实时性与稳定性,否则可能出现报文丢失或延迟。
随着 CAN FD 的普及,CanDrv 还需要支持更高的带宽与更大的数据负载。相比传统 CAN
的 8 字节负载,CAN FD 可支持 64 字节,这对驱动层的缓冲管理和中断处理提出了更高要求。工程实践中,开发人员需要仔细设计中断优先级、环形缓冲区和
DMA 支持,以确保在高负载下仍能稳定运行。
在功能安全的背景下,CanDrv 还需要支持诊断和冗余机制。例如,当检测到 Bus Off 状态时,驱动需要自动触发恢复流程,并在必要时将错误信息上传给上层模块。对于
ASIL-D 级别的安全系统,CanDrv 必须保证即使在单点故障下,通信仍具备一定的可控性和可恢复性。
05
总结
在 AUTOSAR 的通信栈中,PduR、Com、CanIf 和 CanDrv
四个模块形成了从抽象到实现、从逻辑到物理的完整路径。PduR 负责路由,解耦了通信双方与通道的关系;Com
提供信号抽象,使上层开发人员从 CAN ID 与位偏移的细节中解放出来;CanIf 提供接口屏障,屏蔽底层硬件差异并管理控制器状态;CanDrv
则直接操控硬件,保障报文收发的实时性与稳定性。
对于资深汽车软件工程师而言,了解从信号到 PDU、从 PDU 到报文、再到总线上的物理传输,整个链路的每一环都可能成为问题的来源。只有对每个模块的设计动机、工作机制与工程挑战有深刻理解,才能在项目中从容应对配置错误、实时性不足、错误恢复等复杂问题。
| 






 订阅
订阅