| 编辑推荐: |
本文介绍了整车控制开发流程、CAN通讯网络结构、VCU系统原理、整车功能规范相关内容。希望对您的学习有所帮助。
本文来自于CSDN,由火龙果软件Alice编辑、推荐。 |
|
1、概述
VCU 是汽车控制系统的核心器件,通过传感器、各级子控制器以及相应的整车控制策略,不仅可以实时获取整车的运行信息,而且还可以控制动力系统输出动力驱动车辆前进。而每个子系统通过
CAN 总线协议形成一个协调的动力总成控制网络,VCU 通过 CAN 总线与其他电控单元进行通讯,便可实现控制指令的上传下达。因此,VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能。在本篇文章中,将对整车控制开发流程、CAN通讯网络结构、VCU系统原理、整车功能规范等进行详细介绍,希望读者朋友有所帮助。
2、整车结构分析
新能源电动汽车的总体性能是由整车电控、电池和电机三大核心部件共同决定。因此,整车动力系统主要部件参数的合理匹配对车辆整体性能和
VCU 设计都具有重要意义,现在市面上大部分电动汽车驱动系统采用的是后置式单电机驱动布置形式。
电驱动系统主要包括:VCU、驱动电机、电机控制器(Motor Control Unit,MCU)、机械传动装置等;
而电源系统主要包括三部分:电池管理系统(Battery Management System,BMS)、动力电池、充电控制器(ChargeController,CC);
辅助系统主要包括七部分:组合仪表模块(Instrument Clus ter Module,ICM)、动力转向系统、DC/DC
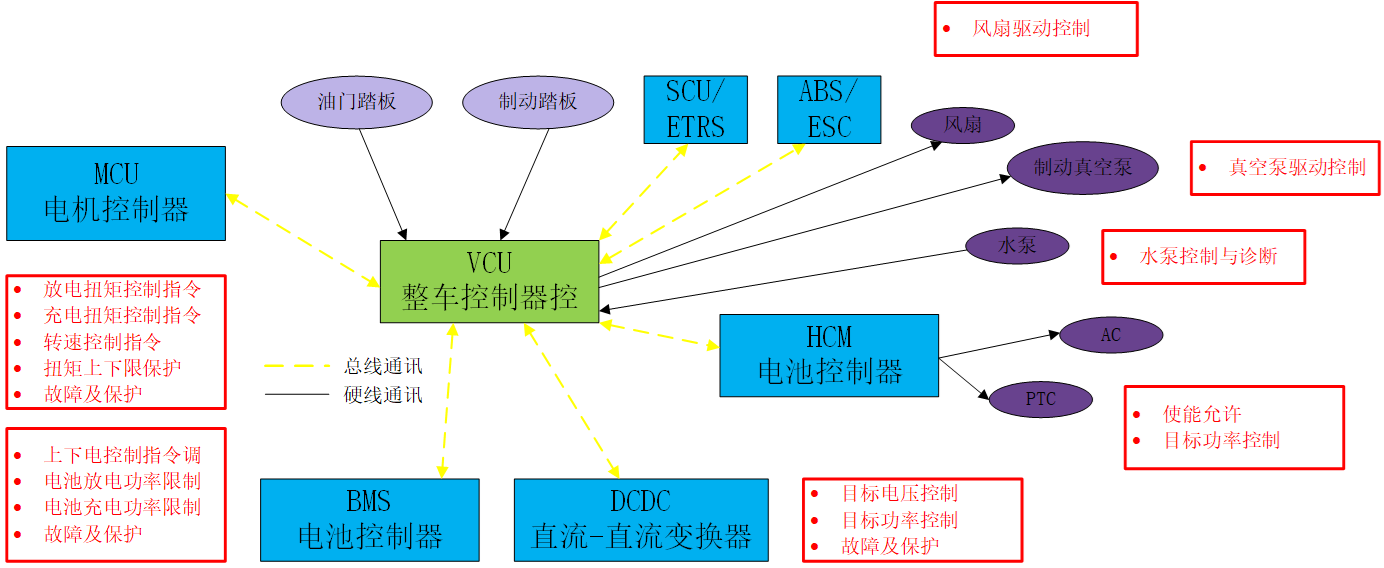
功率转换器(DC Converter,DC/DC)、空调、冷却风扇、PTC 加热单元、水泵,车辆VCU交互如图:
车辆基本参数
| 基本参数 |
项目参数 |
数值 |
| 车辆参数 |
整车装备质量 |
|
| 满载质量 |
|
| 最高车速要求 |
|
| 最大爬坡度 |
|
| 滚动半径 |
|
| 迎风面积 |
|
| 风阻系数 |
|
| 主传动比 |
|
| |
0-50km/h 加速性能 |
|
| |
50-80km/h 加速性能 |
|
| 电机工作电压 |
|
| 电机满功率工作电压 |
|
| 电机最大功率 |
|
| 电机稳定功率 |
|
| 电机峰值扭矩 |
|
| 电机额定扭矩 |
|
| 电机额定转速 |
|
| 电机最高转速 |
|
| 电池主要参数 |
电池额定电压 |
|
| 电池总电量 |
|
| 电池标称电压 |
|
| 电池额定容量 |
|
| 允许最大充、放电电流 |
|
3、VCU整车控制系统定义
3.1、整车 CAN 网络拓扑结构
CAN 通讯因其快速稳定的传输特性现如今已是汽车上使用最为广泛的通讯方式,作为纯电动汽车控制中枢的
VCU,需要与 BMS、ICM、MCU、充电模组(Charge Module,CM)、电动压缩机(HV
Electrical Air-condictioning Compressor,EAC)、行人提醒装置(Pedestrain
Prompting Device,PPD)、远程控制模块(Telematics BOX,TBOX)、空调模块(Climat
ModuleCLM)、防抱死系统(Antilock Brake System,ABS)等电控单元实时进行信息通讯,而
CAN 网络便可实现各控制器之间信息交互和信息共享的功能。本文遵循 SAE_J1939 协议读取电机转速、电池电压等信息,仪表还能接收传感器的车速、电池剩余电量、故障信息提醒等信号并显示在
ICM 中,以确保驾驶员实时掌握车辆工作状况。本文应用一路 CAN 网络通道,来实现 VCU 与其它
ECU 之间的信息传递与共享、数据标定调试及故障诊断处理等功能,同时也确保了信息交互的实时性、准确可靠性。根据上文所述的整车功能需求设计了
CAN 通讯网络拓扑结构,通过在总线末端增加的两个120Ω的终端电阻,防止了CAN信号在CAN通讯网络上产生变化的电压反射。整车
CAN 网络拓扑结构如图 2-4 所示。
3.2、VCU系统原理图
(1) 汽车驱动控制。VCU 需要采集驾驶员的操作指令、行车附近道路的环境情况以及当前车辆状态,经过内部策略和算法的分析和判断,向
MCU 下达指令,驱动车辆前进。
(2) 制动能量回馈控制。通过 VCU 实时获取到的制动及加速踏板信息、车辆运行状态等信息后,能够精确计算出制动时的减速度,当制动能量回馈条件满足后,VCU
向MCU 发送能量回收指令,动力电池组将收到反充的能量。
(3) 整车能量管理与优化。VCU 和 BMS 通过 CAN 总线共同担负着整车的能量管理,且实现着整车能量的超高利用功能。VCU
在 BMS 的辅助下能完成充放电控制、故障诊断、信息通讯、参数监测等功能。还能够依据具体的行驶状况,实现车辆能量的合理分配和安全行驶任务。
(4) 整车网络化管理。VCU 作为信息控制中枢,不仅担负着整车信息传递和共享的功能,而且具有实时的监控和管理当前网络状态的功能,还能对信息接收的优先权进行动态分配,对车辆通信网络的正常工作起着举足轻重的作用。
(5) 整车状态监视和故障诊断与处理。VCU 不仅可以实时对车辆运行状态进行监控,还可以及时对检测出来的整车异常状态信息或者其它控制器反馈的故障代码做出提示,问题严重的情况下还能采取必要的安全措施,来确保车辆在行驶过程中驾乘人员的财产和人身安全。
3.3、整车控制器硬件电路方案设计及引脚定义
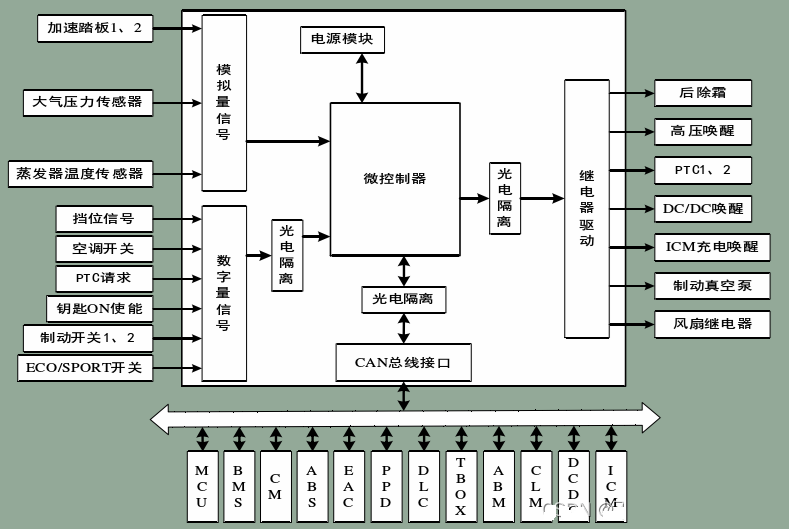
整车控制策略功能的实现需要依托整车控制器硬件作为载体,VCU 通过采集各个传感器信号,从而解析驾驶员操作意图,以控制各个执行器完成功能实现的目的。因此,设计可靠、稳定、功能完善的整车控制器硬件电路具有重大意义。依据上文设计的整车控制器软件架构、整车
CAN 网络拓扑结构和整车控制器硬件原理架构,设计的控制器硬件电路需包括下述五个部分。整车控制器硬件如图
所示。

(1) 为了提高数据运算速度和数字信号处理能力,采用 Free-Scale 车规级芯片作为整车控制器的主控芯片,该芯片集成度非常高、使用寿命长、具有十分丰富的
I/O 接口资源,拥有较强的抗干扰能力;
(2) 为了采集各类传感器所传递的输入信号,设计了各类输入信号的采集电路,如数字量、模拟量输入采集电路等。而模拟量输入电路能够采集加速踏板传感器和大气压力传感器等输入信号,数字量输入电路能够采集钥匙
ON 开关信号和挡位信号等输入信号,能够有效的对车载传感器输入信号进行实时采集,同时还预留出了一部分输入信号接口为后续再次开发使用做准备;
(3) 设计的输出电路,主要包括低边输出和高边输出两部分。其中,低边输出主要用于与动力总成相关的负载,高边输出主要用于与车身相关功能。低边输出对于负载,下拉到
GND,可用于实现 MCU 和 PTC 等控制。高边输出对于负载,上拉到 UBR,可用于实现汽车 CLM、车灯等用电设备的控制;
(4) 为了实现 VCU 与其它 ECU 之间的信息传递与共享、数据标定调试及整车故障诊断处理等功能,设计了
CAN 通讯等电路,并能够确保通信的实时性和信息的可靠性。CAN 通讯网络电路的设计还考虑到了电磁兼容性和抗干扰性等问题;
(5) 整车控制器的电源由车载 12V 电源提供,而主控芯片的电源引脚需要外部提供5V 供电。因此,设计了电压转换电路,该电路能够将
12V 电压转换为 VCU 中元器件所需的 5V 电压。另外,该电路还具备过压、过流等相应的保护功能。
整车控制器设计完成之后,需要对其用到的输入和输出引脚进行定义,为后期正确采集各传感器信号及驱动信号输出提供保障,同时也为控制器后期的电气连接提供依据,整车控制器相关接口引脚定义,如表所示。
| 序号 |
信号名称 |
信号类型 |
控制器引脚 |
| 1 |
加速踏板信号 1 |
模拟量输入信号 |
25 |
| 2 |
加速踏板信号 2 |
30 |
| 3 |
大气压力传感器信号 |
42 |
| 4 |
蒸发器温度传感器信号 |
34 |
| 5 |
换挡信号 1 |
数字量输入信号 |
11 |
| 6 |
换挡信号 2 |
52 |
| 7 |
空调开关信号 |
8 |
| 8 |
PTC 开关信号 |
16 |
| 9 |
钥匙 ON 使能信号 |
2 |
| 10 |
ECO/SPORT 开关信号 |
19 |
| 11 |
制动开关信号 1 |
7 |
| 12 |
制动开关信号 2 |
5 |
| 13 |
制动真空泵继电器控制信号 |
低边输出 |
61 |
| 14 |
高压唤醒继电器控制信号 |
58 |
| 15 |
DCDC 唤醒 |
高边输入 |
59 |
| 16 |
CAN_H |
CAN高 |
14 |
| 17 |
CAN_L |
CAN低 |
13 |
4、整车控制器功能设计
整车控制策略不仅是纯电动汽车的核心技术,也是整车能量管理和动力系统管理的核心算法。因此,整车控制策略设计的优劣直接影响纯电动车的安全平稳运行,一套性能完善、安全、可靠的控制策略,能够使车辆的电机控制器、电池管理系统高效运行,并且能够提高整车的工作效率。下面简单介绍一下整车控制器常见功能需求。
4.1、系统上下电
(1)VCU上电
| 防盗认证 |
| 行车主接触器闭合 |
| mcu使能 |
| ready控制 |
(1)VCU下电
| 正常模式 |
| 故障模式 |
| mcu退出使能控制 |
| 行车主接触器断开控制 |
| mcu主动放电控制 |
| 下电延时控制 |
| 重复上电控制 |
4.2、扭矩控制
| 扭矩需求 |
| 跛行扭矩 |
| 扭矩限制 |
| 电机保护措施 |
| 限功率控制 |
| 扭矩协调 |
| 扭矩选择 |
| 扭矩平滑过渡 |
| 扭矩梯度处理 |
| 零扭矩输出条件 |
4.3、蠕行功能
4.4、驾驶员意图解析
| 车速计算 |
| 挡位识别判断 |
| 挡位设置 |
| 挡位故障判断 |
| 挡位判断 |
| 驾驶模式控制 |
4.5、能量回收管理
| 能量回收条件判断 |
| 制动能量回收 |
| 滑行能量回收 |
| 能量回收扭矩分配 |
| 能量回收点亮制动灯 |
4.6、附件控制
| 水泵控制 |
| 冷却风扇控制 |
| 电子阀门控制 |
| 真空泵控制 |
| DCDC控制 |
| AC功率限制 |
| AC、PTC控制 |
4.7、仪表显示控制
4.8、整车状态管理
4.9、诊断控制
| 诊断故障码读取 |
| 诊断故障码记录 |
| 诊断故障码清除 |
| 诊断功能操作 |
| 诊断服务控制 |
| 在线刷新功能 |
| 






 订阅
订阅