| 编辑推荐: |
本文主要对系统架构+冗余软件设计+冗余硬件设计+冗余PCBA设计,几个方面进行解读,希望对您的学习有所帮助。
本文来自于新能源控制系统及MBD开发,由火龙果软件Alice编辑、推荐。 |
|
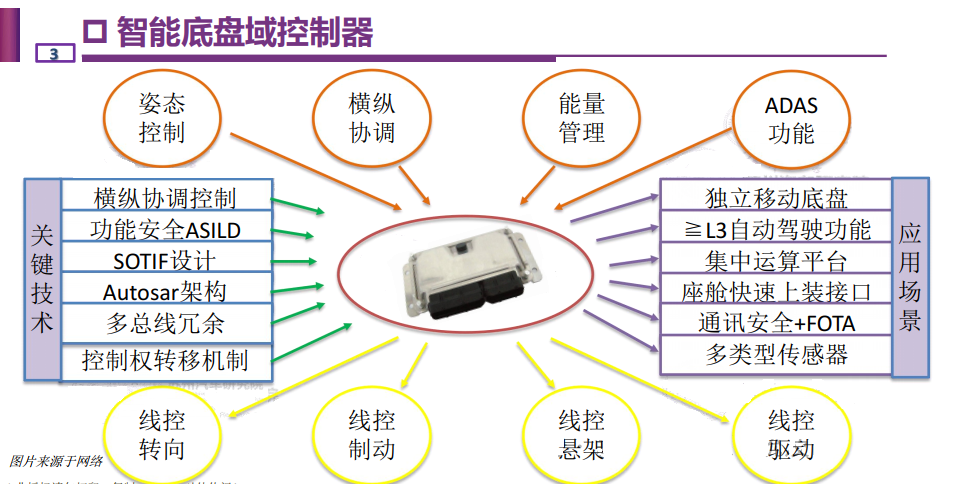
前几期讨论线控制动,作为底盘设计的另外一个难点,线控转向也是实现智能底盘的关键所在! 一个横行控制,一个纵向控制,做智能底盘及智能驾驶的核心,其中安全是最赚钱,也是最重要的,本文就节点清华高才生的一个线控系统PPT, 同时加上芜湖专家的解读,感兴趣可以参考。 解读主要分为一下几个方面,系统架构+冗余软件设计+冗余硬件设计+冗余PCBA设计,几个方面进行解读。
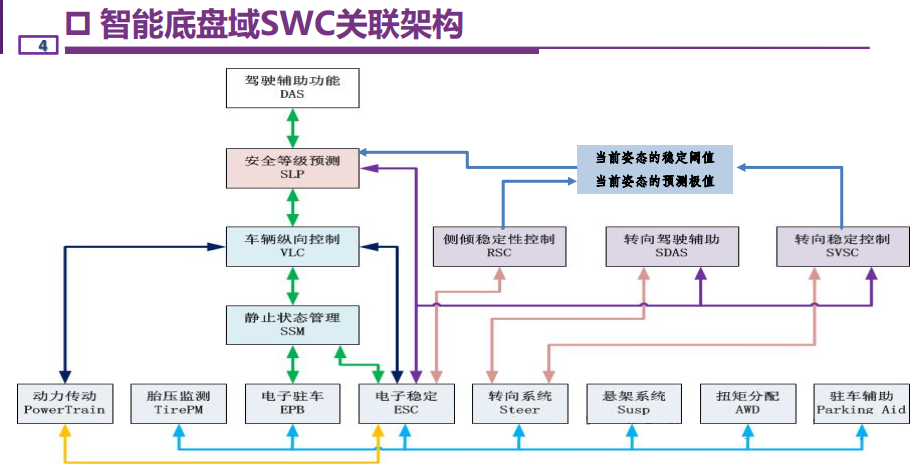
图表呈现了一个复杂的系统架构图,主要描述智能底盘域中各个软件组件之间的关联关系。整体布局采用流程图的形式,使用不同颜色的框体和箭头来表示各个组件及其之间的数据流或控制流。
主要组件及其功能
位于图表的最上方,作为整个架构的输入源之一。它可能涵盖诸如自适应巡航、车道保持辅助等驾驶辅助功能,为后续的安全等级预测等模块提供基础数据。
接收来自驾驶辅助功能(DAS)的信息,进行安全等级的预测。其输出包括当前姿态的稳定阈值和当前姿态的预测阈值,这些信息将传递给其他相关模块,用于调整车辆的控制策略,确保行驶安全。
负责车辆的纵向运动控制,如加速、减速和制动等。它与多个模块存在关联,接收来自安全等级预测(SLP)的信息,同时与静止状态管理(SSM)、侧倾稳定性控制(RSC)等模块交互,根据车辆的实时状态和安全需求调整纵向控制策略。
主要关注车辆在行驶过程中的侧倾稳定性,通过与其他模块如车辆纵向控制(VLC)、转向驾驶辅助(SDAS)等的信息交互,对车辆的侧倾状态进行监测和控制,防止车辆发生侧翻等危险情况。
协助驾驶员进行转向操作,根据车辆的行驶状态和周围环境信息,提供适当的转向助力或自动转向功能。它与转向稳定控制(SVSC)、安全等级预测(SLP)等模块紧密配合,确保转向过程的安全和稳定。
专注于转向过程中的稳定性控制,通过与其他模块的协同工作,优化车辆的转向性能,提高行驶的稳定性和安全性。
负责车辆在静止状态下的管理,例如电子驻车(EPB)的控制等。它与车辆纵向控制(VLC)、电子稳定(ESC)等模块相关联,确保车辆在静止时的稳定性和安全性。
作为车辆的动力来源部分,与车辆纵向控制(VLC)等模块存在关联,为车辆的行驶提供动力支持,并根据控制策略调整动力输出。
实时监测轮胎压力,并将相关信息传递给电子稳定(ESC)等模块。轮胎压力的正常与否直接影响车辆的行驶稳定性和安全性,因此该模块的信息对于其他控制模块的决策至关重要。
实现车辆的电子驻车功能,与静止状态管理(SSM)等模块协同工作,确保车辆在停车时的稳定驻车。
通过对车辆行驶状态的监测和分析,当车辆出现不稳定趋势时,自动调整制动力和动力输出,以保持车辆的稳定性。它与多个模块如胎压监测(TirePM)、转向系统(Steer)等存在信息交互。
负责车辆的转向操作,接收来自转向驾驶辅助(SDAS)等模块的指令,实现精确的转向控制。
对车辆的悬架进行控制,根据车辆的行驶状态和路面情况,调整悬架的刚度和阻尼,提高车辆的行驶舒适性和稳定性。
合理分配车辆的动力扭矩到各个车轮,以提高车辆的牵引力和操控性能。它与车辆纵向控制(VLC)等模块相关联,根据控制策略调整扭矩分配比例。
协助驾驶员进行驻车操作,通过传感器等设备感知周围环境信息,为驾驶员提供驻车指引或自动完成驻车过程。
组件间的关联关系
图表中使用箭头清晰地展示了各个组件之间的关联关系,箭头方向表示信息或控制信号的流向。
例如,驾驶辅助功能(DAS)的信息传递给安全等级预测(SLP),安全等级预测的结果又传递给车辆纵向控制(VLC)、侧倾稳定性控制(RSC)等多个模块。
这些模块再根据接收到的信息进行相应的控制操作,并将自身的状态信息反馈给其他相关模块,形成一个有机的整体,共同实现智能底盘的各项功能。
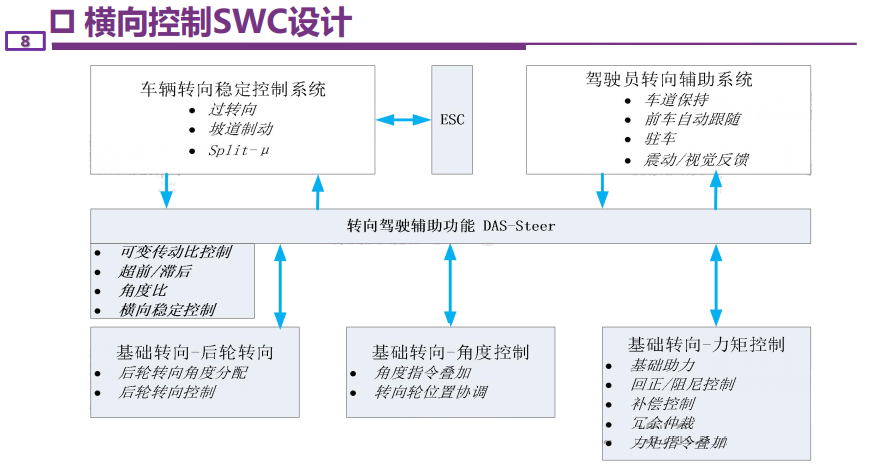
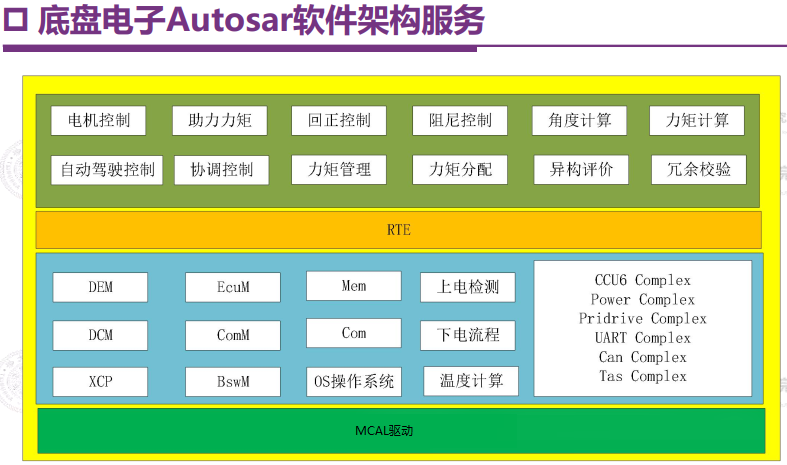
上图系统展示了智能底盘域中软件组件(SWC, Software Component)的关联架构。
该架构以分层形式呈现,涵盖驾驶辅助功能、安全等级预测、车辆纵向控制、横向控制、动力总成控制、制动控制、转向控制等多个核心模块,并详细标注了各模块间的输入输出关系及交互逻辑。
架构分层与模块解析
驾驶辅助功能层
模块组成:
包括车道保持(Lane Keeping)、前车自动跟随(ACC, Adaptive Cruise Control)、自动泊车(Parking Assist)等功能。
交互逻辑:
车道保持功能接收来自横向控制模块的转向指令,实现车辆在车道内的稳定行驶。
ACC功能通过纵向控制模块调节车速,与前车保持安全距离。
自动泊车功能整合横向与纵向控制,实现精准泊车操作。
技术意义:此层是智能底盘与驾驶员交互的直接接口,通过软件算法实现辅助驾驶功能,提升驾驶便利性与安全性。
安全等级预测层
模块组成:
包含故障检测(Fault Detection)、安全等级评估(Safety Level Assessment)等模块。
交互逻辑:
故障检测模块实时监控各硬件组件(如传感器、执行器)的状态,发现异常时触发安全等级评估。
安全等级评估模块根据故障类型与严重程度,输出安全等级信号至协调控制层,指导系统采取降级或紧急措施。
技术意义:
此层是冗余设计的核心,通过实时安全评估确保系统在故障发生时仍能维持基本功能,满足功能安全( ISO 26262 )要求。
协调控制层
模块组成:
包括横纵协调控制(Lateral-Longitudinal Coordination)、 力矩仲裁与分配 (Torque Arbitration & Distribution)等模块。
交互逻辑:
横纵协调控制模块接收来自驾驶辅助功能层的需求信号(如转向角、加速度),结合车辆状态(车速、横摆角速度)生成协调控制指令。
力矩仲裁与分配模块根据协调控制指令,分配转向电机与制动电机的力矩需求,确保横纵运动的高效协同。
技术意义:
此层是实现线控转向与制动系统深度融合的关键,通过软件算法优化横纵运动控制,提升车辆动态性能。
执行控制层
模块组成:
涵盖车辆纵向控制(Vehicle Longitudinal Control)、横向控制(Lateral Control)、动力总成控制(Powertrain Control)、制动控制(Brake Control)、转向控制(Steering Control)等模块。
交互逻辑:
纵向控制模块接收协调控制层的加速度指令,调节电机扭矩或制动压力,实现车速控制。
横向控制模块接收转向角指令,驱动转向电机执行转向操作。
动力总成、制动与转向控制模块通过CAN总线或FlexRay总线与协调控制层实时通信,确保执行精度。
技术意义:
此层是冗余设计的执行端,通过多执行器协同工作,实现故障情况下的功能降级或冗余切换。
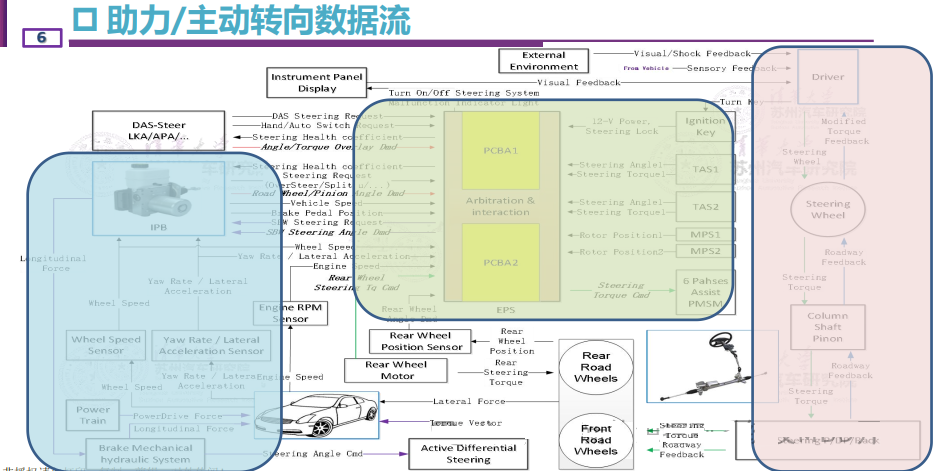
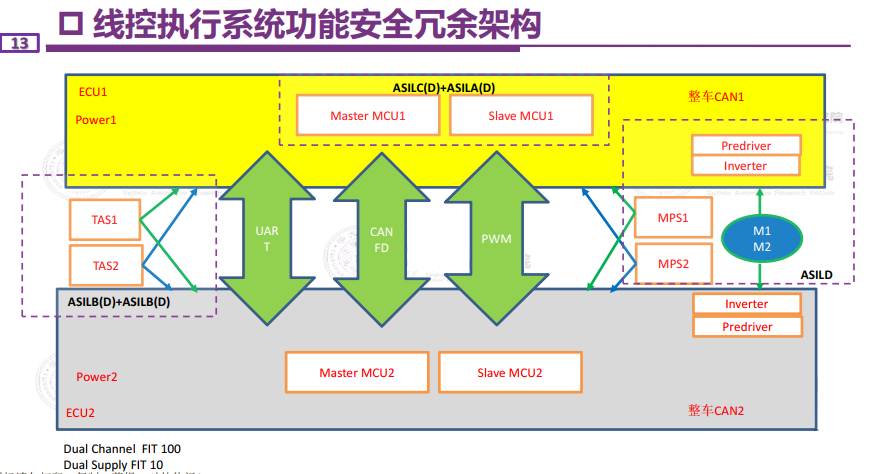
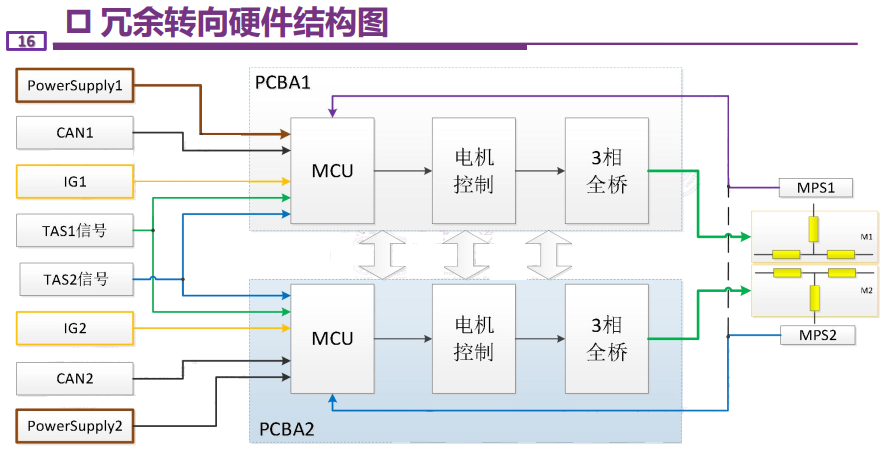
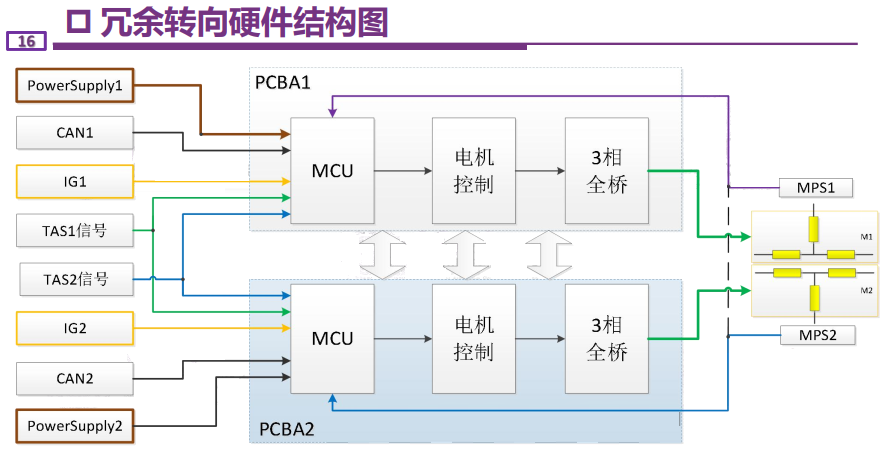
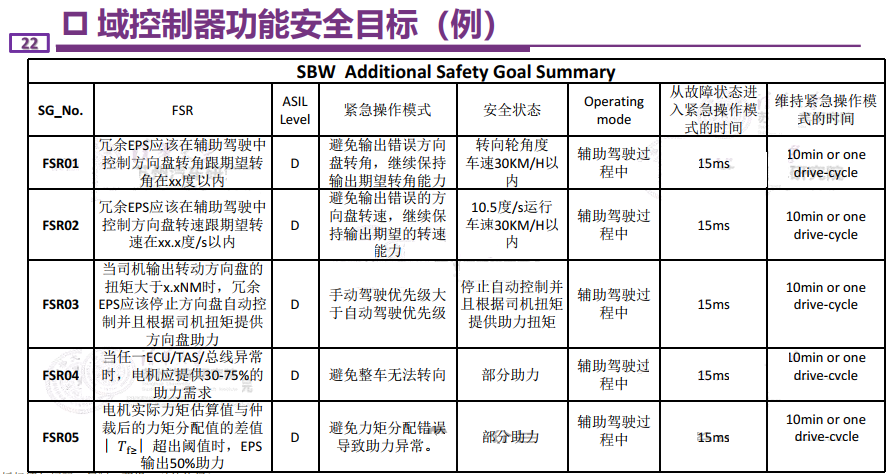
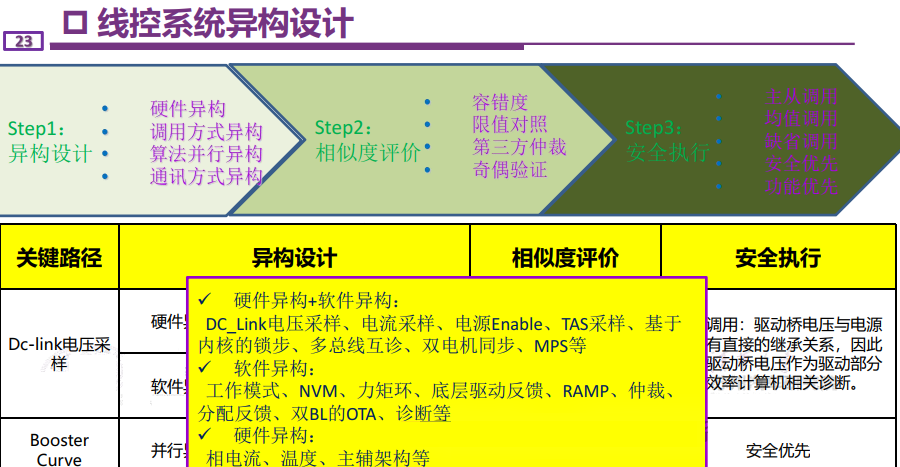
EPS-PowerPack冗余系统架构由以下核心组件构成:
双电机系统
- 主电机+备份电机: 采用 异构设计 (如主电机为永磁同步电机,备份电机为无刷直流电机),避免共因失效。
- 独立控制通道: 每个电机配备独立的驱动电路和控制器,实现物理隔离。
- 力矩叠加机制: 正常工况下双电机协同输出,故障时备份电机快速接管,确保转向力矩连续性。
冗余传感器组
- 双转向角传感器: 独立测量转向盘角度,交叉验证数据有效性。
- 双扭矩传感器: 监测电机输出扭矩,防止因传感器故障导致误操作。
- 惯性测量单元(IMU): 提供横摆角速度、侧向加速度等冗余数据,辅助故障诊断。
冗余电源供电系统
- 主电源+备用电源: 主电源由车辆动力电池供电,备用电源采用独立电池组或超级电容。
- 电源管理单元(PMU): 实时监测电源状态,故障时自动切换供电通道,确保关键组件持续供电。
冗余通信网络
- 双CAN总线: 主总线用于常规通信,备用总线在主总线故障时激活。
- FlexRay/以太网 : 支持高带宽数据传输,满足未来自动驾驶的扩展需求。
冗余与协同的平衡
双电机协同控制
- 正常模式:双电机按预设比例分配力矩,优化能效和响应速度。
- 故障模式:检测到主电机故障后,备份电机在100ms内接管,维持至少50%的转向能力。
传感器数据融合
- 主传感器+备份传感器:双转向角传感器数据通过卡尔曼滤波融合,提高测量精度。
- 故障阈值设定:当两传感器数据偏差超过5%时,触发降级策略。
电源切换逻辑
- 电压监测:PMU持续监测主电源电压,当电压跌落至9V以下时,自动切换至备用电源。
- 能量管理:备用电源仅在关键工况下激活,延长系统续航。
冗余如何消除单点故障?
物理冗余
- 独立硬件通道: 双电机、双传感器、双电源在物理上完全隔离,避免单一故障扩散。
- 空间冗余: 组件布局考虑散热和电磁干扰,确保故障时互不影响。
功能冗余
- 异构算法: 主控制器采用模型预测控制(MPC),备份控制器采用滑模控制(SMC),避免算法共因失效。
- 交叉校验: 双控制器实时比较输出指令,差异超过阈值时触发仲裁机制。
时间冗余
- 快速响应: 故障检测与切换时间控制在100ms以内,满足L3级自动驾驶的实时性要求。
- 看门狗定时器: 监控控制器运行状态,超时后自动复位或切换至备份系统。
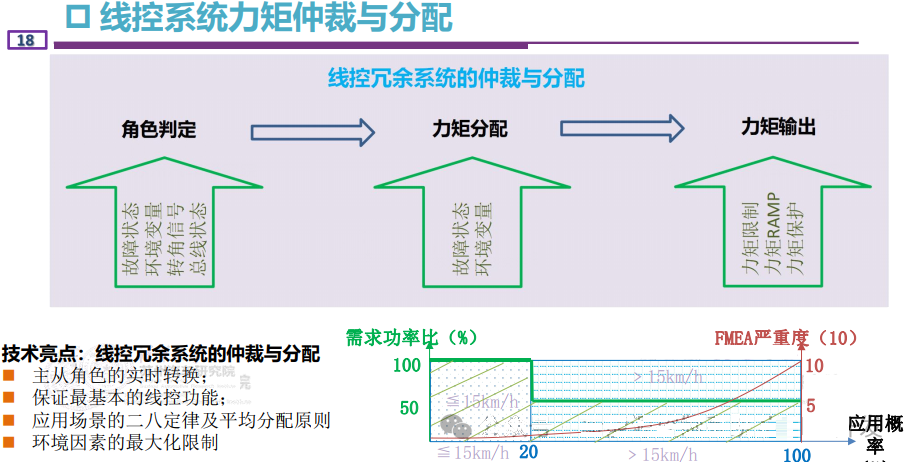
矩仲裁与分配”主要涉及线控冗余系统中的仲裁与分配机制,以下是对该机制的详细讲解:
角色判定
功能: 这是系统的初始阶段,主要负责收集和判定各种输入信号,包括车辆状态信号、驾驶员输入信号以及系统故障信号等。
细节:
- 态量信号总线: 负责传输车辆的各种状态信息,如车速、转向角度等。
- 故障状态信号: 当系统出现故障时,会生成相应的故障信号,用于后续的故障处理和系统调整。
- 故障环境角转换与总线: 这些组件可能用于将故障信号转换为系统能够理解的格式,并通过总线传输给其他部分。
力矩分配
功能:
在角色判定之后,系统需要根据当前的车辆状态和驾驶员需求,合理地分配力矩到各个执行机构。
细节:
态量信号与故障状态 :这些信号会影响力矩的分配策略。例如,如果检测到某个车轮打滑,系统可能会减少该车轮的力矩分配,以增加其他车轮的牵引力。
故障环境变量:
这些变量可能包括路面条件、车辆负载等,它们也会影响力矩的分配。
力矩输出
功能:
这是系统的最终输出阶段,负责将分配好的力矩实际输出到各个执行机构,如电机、制动器等。
细节:
- 力矩限制: 为了保护执行机构和车辆,系统会设置力矩限制,防止过大的力矩损坏设备或导致车辆失控。
- 力矩RAMP: 这可能指的是力矩的平滑过渡或渐变过程,以确保车辆行驶的平稳性。
- 力矩保护: 在极端情况下,系统会采取额外的保护措施,如紧急制动等,以确保车辆和乘客的安全。
需求功率比与FMEA严重度
需求功率比: 图表中的需求功率比表示了在不同应用概率下,系统所需的功率与最大功率之比。这有助于系统在不同工况下合理地分配和使用功率。
FMEA严重度: FMEA(Failure Mode and Effects Analysis)是一种评估系统故障模式及其影响的方法。图表中的FMEA严重度表示了在不同需求功率比下,系统故障的严重程度。这有助于系统在设计时考虑故障容忍度和冗余设计。
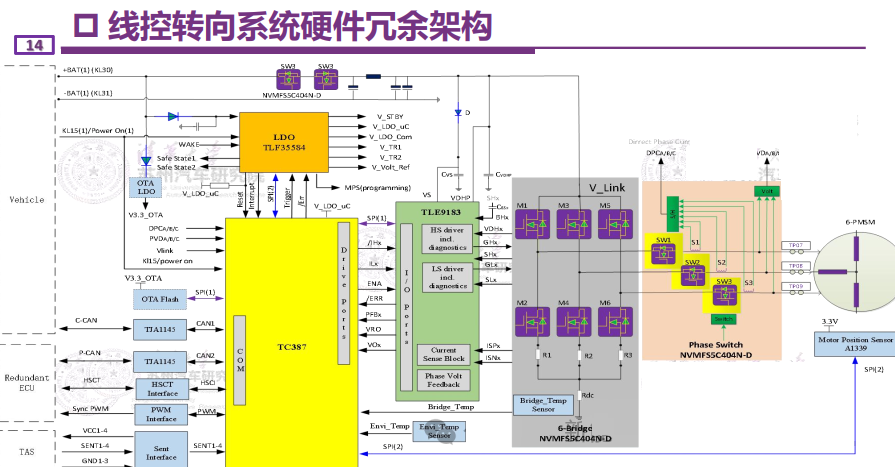
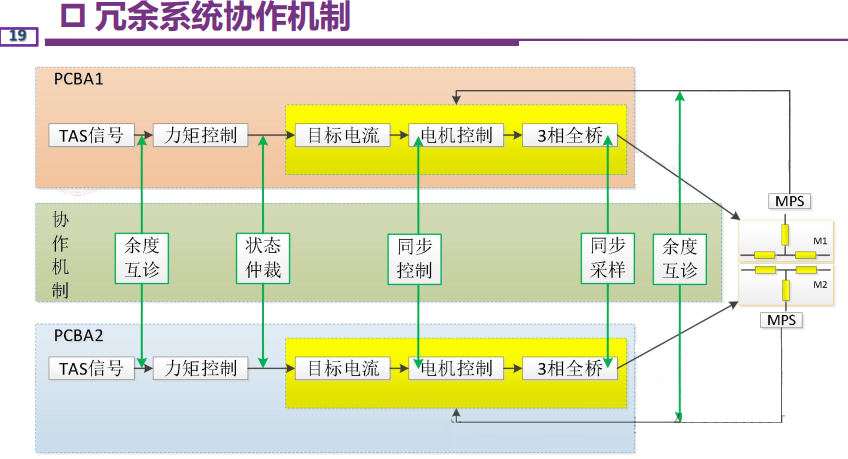
PCBA1和PCBA2的内部流程
每个PCBA的处理流程从接收TAS信号开始,依次经过以下步骤:
- 力矩控制:接收TAS信号后,进行力矩控制,计算出目标电流。
- 目标电流:力矩控制模块输出目标电流,传递给电机控制模块。
- 电机控制:根据目标电流,电机控制模块生成相应的控制信号,传递给3相全桥。
- 3相全桥:负责将控制信号转换为实际的电机驱动信号,驱动电机运行。
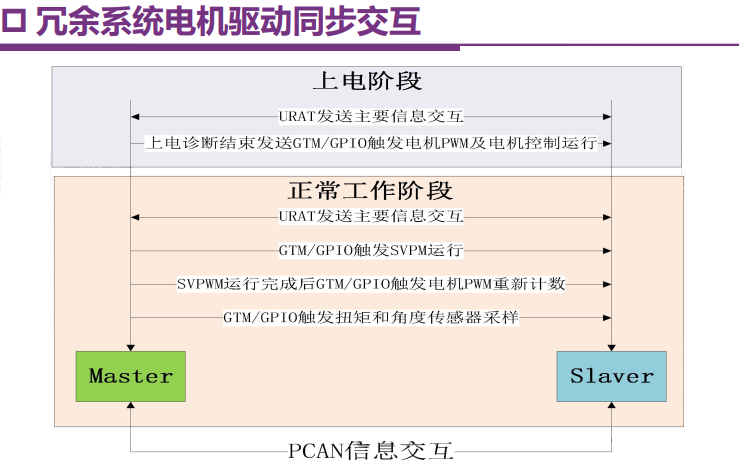
协作机制
PCBA1和PCBA2之间通过多种协作机制确保系统的冗余和可靠性:
- 余度互诊 :两个PCBA之间相互诊断对方的运行状态,检测是否存在故障。
- 状态仲裁:根据余度互诊的结果,进行状态仲裁,决定系统的最终运行状态。
- 同步控制:确保两个PCBA的操作同步,避免因时间不同步导致的系统不稳定。
- 同步采样:对系统状态进行同步采样,保证数据的一致性。
- 余度互诊(再次出现,强调其重要性):进一步强调两个PCBA之间的相互诊断机制。
| 






 订阅
订阅