| 编辑推荐: |
本文旨在解读该综述,探讨构建自主 LLM 智能体所需的四大核心组件:感知、推理、记忆和执行,希望对你的学习有帮助。
本文来自于AI贺贺,由火龙果软件Alice编辑,推荐。 |
|
一篇名为《Fundamentals of Building Autonomous LLM Agents》的综述,系统性地梳理了构建 LLM 智能体的技术全景,并提供了一个设计框架,用于指导如何将语言模型从被动的“文本生成器”转变为主动的“任务执行者”。
本文旨在解读该综述,探讨构建自主 LLM 智能体所需的四大核心组件: 感知、推理、记忆和执行 。
一、从“提示词工程”到“自主智能体”的演进
传统的 LLM 应用依赖于人类通过提示词(Prompt)进行引导,这是一种“人-机”协作模式。LLM 作为工具,其执行过程需要人类的持续监督和指令输入。
然而,现实世界的任务具有复杂性,通常包含多个步骤、需要与外部工具(如 API、数据库)交互,并要求在动态环境中做出决策。
因此,“自主智能体”旨在解决一个核心问题: 如何让 LLM 摆脱对人类指令的强依赖,自主地、端到端地完成复杂目标?
该综述提出的方案是:为 LLM 构建一个模仿人类认知过程的模块化架构。
二、智能体的四大核心组件:一个统一架构
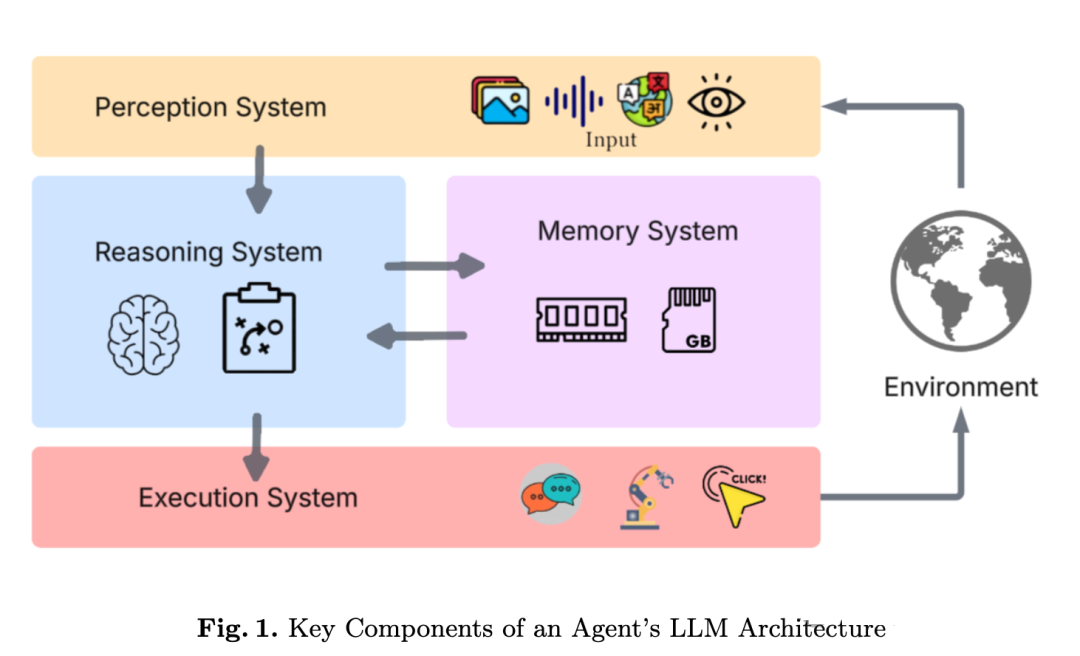
论文的核心思想,是将智能体的核心功能解构为四个相互协作的系统。该框架旨在为工程实践提供设计模式参考。
图:智能体四大核心组件协同工作流程
1. 感知 (Perception):智能体的输入接口
感知系统是智能体的输入模块,负责将来自环境的原始、异构的数据,转化为 LLM 能够理解的结构化信息。论文将感知方法分为四类:纯文本、多模态、结构化数据和基于工具的感知。
1.1 多模态感知 (Multimodal Perception)
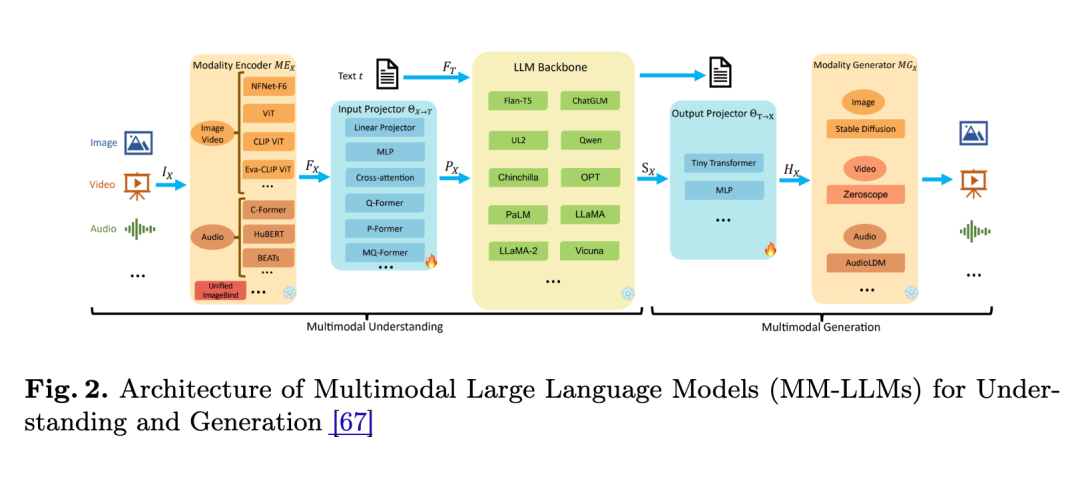
对于需要与 GUI 或现实世界交互的智能体,多模态感知至关重要。这主要通过 多模态大型语言模型 (MM-LLMs) 实现。其通用架构通常包括:
- 模态编码器 (Modality Encoder) :如 ViT,用于提取图像、视频等非文本数据的特征。
- 输入投影器 (Input Projector) :将非文本特征对齐到 LLM 的文本特征空间,充当“桥梁”。
- LLM 骨干 (LLM Backbone) :作为核心推理引擎,处理对齐后的多模态输入。
为解决 MM-LLMs 在精细视觉感知(如准确定位、计数)上的不足,研究者提出了一些增强技术:
- 集成专业视觉编码器 :例如, VCoder 架构额外引入处理分割图(提供对象轮廓)和深度图(提供空间关系)的视觉编码器,以增强模型的视觉理解能力。
- 标记集操作 (Set-of-Mark, SoM) :通过在图像上显式地标注关键区域(如给按钮加上边界框),引导模型将注意力集中在特定对象上,从而提高特定任务的性能。
1.2 结构化数据感知 (Structured Data Perception)
除了直接处理视觉信息,智能体还可以通过解析结构化的环境数据来提升感知精度。
- **可访问性树 (Accessibility Tree)**:在 GUI 自动化任务中,系统可以生成 A11y Tree,它以树状结构描述了界面上所有组件的层级关系、角色和状态(如 button , text field )。 OSCAR 等智能体利用此信息进行更可靠的组件定位。
- HTML DOM : 在 Web 任务中,智能体可以直接解析页面的 HTML DOM 树,获取比截图更精确的元素信息和页面结构。
对开发者的启示:
- 融合多种感知模式 :最强大的感知系统通常是多模态视觉和结构化数据的结合。例如,同时分析截图的视觉信息和 A11y/DOM 树的结构信息,可以实现更鲁棒的 GUI 理解。
- 平衡精度与成本 :直接增强 MM-LLM 的成本高昂。而采用外部工具(如 SoM、专用编码器)或解析结构化数据,是在成本和性能之间取得平衡的实用策略。
- 信息过滤 :无论是视觉还是结构化数据,都充满了噪声。感知系统需要具备过滤无关信息、提炼核心内容的能力。
2. 推理 (Reasoning):智能体的决策核心
推理系统是智能体的核心决策模块,负责制定和调整计划。论文回顾了多种技术,可归纳为任务分解、多方案规划、反思机制和多智能体协作等几个方面。
2.1 任务分解 (Task Decomposition)
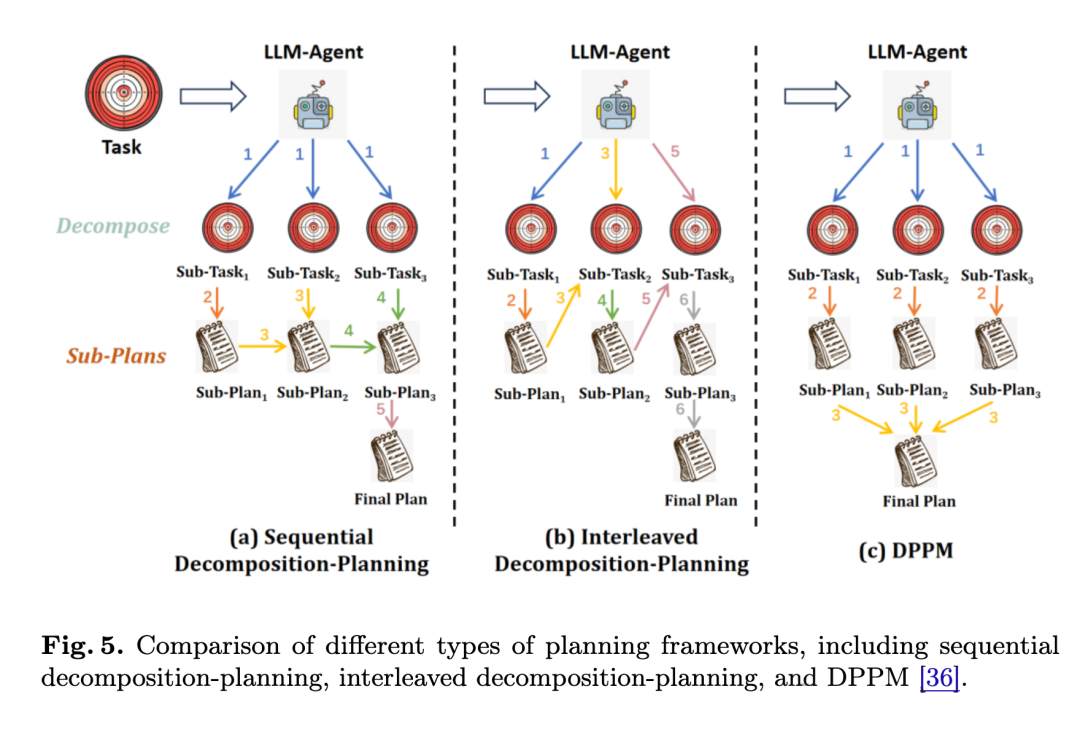
面对复杂任务,智能体首先需要将其分解为更小、更易于管理的子任务。主要有两种分解策略:
- 分解优先 (Decomposition First) :该方法首先将整个任务完全分解为一系列子目标,然后依次为每个子目标制定计划。例如, HuggingGPT 和 DPPM (Decompose, Plan in Parallel, and Merge) 范式。DPPM 的特点是并行生成所有子任务的计划,最后再合并成一个全局计划,从而避免了顺序规划中可能出现的错误累积。
- 交错分解 (Interleaved Decomposition) :该方法将分解和规划交织在一起,一次只揭示和处理一到两个子任务,并根据环境的实时反馈动态调整后续的分解。典型的例子是 Chain-of-Thought (CoT) 和 ReAct 。这种方式更加灵活,容错性更强,但在极长链条的任务中可能偏离最初的目标。
2.2 多方案规划与选择 (Multi-Plan Generation and Selection)
为了提高规划的鲁棒性,智能体可以一次性生成多个候选计划,并从中选择最优的一个。
- 基于思维链的扩展 : Self-consistent CoT (CoT-SC) 通过多次生成 CoT 路径并投票选出最一致的答案。 Tree-of-Thought (ToT) 将推理过程组织成一棵树,在每个节点上探索多个可能的“想法”,并进行评估和剪枝。 Graph of Thoughts (GoT) 进一步将其扩展为图结构,允许更灵活的思路聚合和转换。
- 基于 蒙特卡洛树搜索 (MCTS) : LLM-MCTS 和 RAP 等方法将 LLM 作为 MCTS 的启发式函数,通过模拟和评估来探索更优的计划路径。
2.3 反思机制 (Reflection)
反思是实现智能体自主学习和纠错的关键。
- 事后反思 (Post-hoc Reflection) :如 Reflexion 论文所示,智能体在完成一次任务(无论成功或失败)后,对整个行动轨迹进行评估,生成语言形式的反馈(“反思”),并将其存储在记忆中,用于指导下一次尝试。
- 事前反思 (Anticipatory Reflection) :如 DEVIL'S ADVOCATE 论文提出的,智能体在执行一个动作 之前 ,主动设想可能的失败原因和替代方案。这种“自我批判”可以提前规避潜在风险,增强计划的稳健性。
2.4 多智能体协作 (Multi-Agent Systems)
可以将单个智能体的不同推理功能,拆分给多个专职的“专家”智能体来协作完成,以提高模块化和效率。常见的专家角色包括:
- 规划专家 :负责顶层任务分解和策略制定。
- 执行专家 :负责将计划转化为具体行动。
- 反思专家 :负责评估行动结果并提出改进建议。
- 错误处理专家 :专门诊断和修复执行过程中的错误。
对开发者的启示:
- 按需选择推理策略 :没有一种推理策略是万能的。应根据任务的复杂性、对实时性的要求和计算成本,灵活组合使用上述技术。例如,简单任务用 CoT,复杂决策用 ToT,需要高容错性的场景加入反思机制。
- 反思是闭环的关键 :一个无法从失败中学习的智能体不是真正的自主智能体。无论是事前还是事后反思,都是构建健壮、自适应系统的核心环节。
- 考虑多智能体架构 :对于大型复杂系统,采用多智能体协作的架构,将规划、执行、反思等职责分离,可以提高系统的可维护性和扩展性。
3. 记忆 (Memory):智能体的知识库
为克服 LLM 有限上下文窗口的限制,记忆系统为智能体提供了长期存储和检索知识的能力,通常分为短期记忆和长期记忆。
- 短期记忆 (Short-term Memory) :即模型的上下文窗口,作为处理当前任务的临时工作区。
- 长期记忆 (Long-term Memory) :用于知识的持久化存储,有多种实现方式。
3.1 长期记忆的实现方式
- 具身记忆 (Embodied Memory) :指通过持续学习(如微调)将经验和知识直接编码到模型参数(权重)中。这使得模型的行为模式会因其“经历”而改变。
- 检索增强生成 (RAG) :通过外部知识库(通常是向量数据库)来增强模型。当接收到查询时,系统首先从知识库中检索相关文档,然后将这些文档作为上下文连同原始查询一起提供给 LLM,以生成更准确、更具事实性的回答。
- SQL 数据库 :适用于存储结构化知识(如用户信息、订单数据)。通过 Text-to-SQL 技术,智能体可以将自然语言问题转换为 SQL 查询,从而与数据库进行可靠的交互。
3.2 记忆中存储的数据类型
一个有效的记忆系统需要存储多种类型的数据,以支持智能体的学习和决策。
- 经验 (Experiences) :记录成功和失败的任务执行轨迹。即使是失败的经验,如果被明确标记,也能帮助智能体避免在未来重复犯错。一个典型的经验可以被结构化为 (指令, [ (观察_1, 行动_1), (观察_2, 行动_2), ... ]) 的形式。
- 程序/工作流 (Procedures/Workflows) :从过去的经验中归纳出的可复用任务流程。例如, Agent Workflow Memory (AWM) 方法可以从训练样本中自动总结出常用的工作流,并在未来执行相似任务时提供给智能体作为指导。
- 知识 (Knowledge) :外部的、事实性的信息,如技术文档、公司规章、领域知识等。
- 用户信息 (User Information) :包括用户的偏好、历史活动、个人背景等。 MemoryBank 等系统旨在通过综合历史交互信息来理解和适应用户的个性。
3.3 记忆管理的挑战
- 上下文窗口限制 :处理长文档或长对话时,需要通过截断、分块或总结等方式来管理上下文长度。
- 记忆重复 (Memory Duplication) :当新信息与现有记录相似时,需要机制来避免冗余。例如,可以将与同一子目标相关的多个成功行动序列,通过 LLM 总结成一个统一的计划,或者通过累加计数的方式来聚合重复信息。
对开发者的启示:
- 结构化是关键 :无论是存储经验还是知识,都应尽量采用结构化的格式(如 JSON、数据库表、状态-行动-结果元组),这远比存储原始文本更利于高效检索和推理。
- 为记忆设计生命周期 :不是所有记忆都同等重要。应考虑设计记忆的压缩、归档和遗忘机制,以确保记忆库的效率和相关性。
- 隐私与安全 :在存储用户信息时,必须高度重视数据隐私和安全问题。
4. 执行 (Action):智能体的输出接口
执行系统负责将 LLM 内部的抽象决策,转化为对环境的实际操作。这超越了简单的文本输出,进入了**多模态行动空间 (Multimodal Action Spaces)**。
4.1 行动空间的主要类型
- 工具与 API 调用 (Tool and API Integration) :这是最基础的行动方式。智能体通过生成结构化输出(通常是 JSON),来调用预定义的函数或外部 API,以执行发送邮件、查询数据库、获取网络信息等操作。
- 视觉界面自动化 (Visual Interface Automation) :对于没有 API 的软件,智能体可以通过模拟人类的键鼠操作来控制 GUI。这通常结合了计算机视觉(识别截图中的按钮、文本框)和 UI 自动化框架(执行点击、输入、拖拽等)。
- 代码生成与执行 (Code Generation and Execution) :一种更强大和灵活的行动方式。智能体动态生成代码(如 Python, SQL, Shell 脚本)来解决特定问题,尤其适用于数据处理、复杂计算和系统集成任务。 Code Interpreter 是这类能力的典型代表。
- 机器人与物理系统控制 (Robotic and Physical System Control) :在具身智能领域,LLM 智能体可以处理来自 物理传感器 的输入,并生成控制指令来操作机器人手臂、无人机等物理设备。
4.2 执行过程中的挑战
- 延迟与协调 :多模态操作(如视觉分析+物理动作)通常涉及不同的时间尺度,需要复杂的协调机制。
- 错误传播 :执行环节的错误(如一次失败的点击)可能会传递给感知和推理环节,形成恶性循环。
- 状态同步 :需要确保智能体的内部状态模型,与外部环境的真实状态保持一致。
对开发者的启示:
- 为行动设计“闭环反馈” :每次行动后,都应该有一个明确的感知步骤来验证行动是否成功、是否达到了预期效果。这是实现可靠执行的基础。
- 从工具调用开始 :对于大多数应用,构建一个稳定、可靠的工具集是实现有效执行的第一步,也是最安全的一步。
- 在沙箱中执行高风险操作 :对于代码执行或文件系统操作等高风险行动,必须在严格隔离的沙箱环境中进行,并设置清晰的权限边界。
三、从理论到现实:当前面临的挑战
尽管该框架提供了一个清晰的结构,但在现实应用中仍面临诸多挑战:
- 推理的幻觉 :如何确保智能体在关键决策点上不产生“幻觉”?
- 环境的复杂性 :数字世界瞬息万变,如何让智能体应对预料之外的 UI 变化或 API 错误?
- 成本与效率 :复杂的推理和记忆系统通常需要多次 LLM 调用,这带来了高昂的成本和延迟。
- 最终的对齐问题 :我们如何确保一个高度自主的智能体,其最终目标始终与人类的利益保持一致?
四、结论
该综述的价值在于为 LLM 智能体的研究和开发提供了一个通用的语言和思考框架,推动 LLM 应用开发从“提示词工程”向“智能体工程”演进。
未来,基于该框架构建的自主系统,有望在完成复杂任务方面扮演更重要的角色。这四大核心组件,是实现这一目标的技术基础。
五、关键术语解释 (Key Terminology)
为了帮助理解文中的核心概念,本节对关键技术术语进行简要说明。
感知 (Perception)
- MM-LLMs (Multimodal Large Language Models) :多模态大型语言模型。指能够同时处理和理解多种信息类型(如文本、图像、音频)的 LLM。其典型架构包含:
- 模态编码器 (Modality Encoder) :负责将各种非文本输入(如图像)转换为模型可以理解的数字特征(Embeddings)。例如,Vision Transformer (ViT) 就是一种常用的图像编码器。
- 输入投影器 (Input Projector) :一个适配层,负责将由模态编码器生成的特征,从其原始的特征空间“投影”或“对齐”到 LLM 所熟悉的文本特征空间。这是实现多模态信息融合的关键桥梁。
- LLM 骨干 (LLM Backbone) :指模型的核心部分,通常是一个预训练好的、强大的纯文本 LLM,负责在接收到所有对齐后的特征后进行高级的语义理解和推理。
- SoM (Set-of-Mark) :标记集操作。一种视觉提示技术,通过在图像上用边界框、标签等标记出关键区域,引导模型将注意力集中在这些特定区域,以提高视觉定位和理解的准确性。
- A11y Tree (Accessibility Tree) :可访问性树。操作系统或浏览器为辅助功能(如屏幕阅读器)生成的一种数据结构,它以树状层级展示了用户界面上的所有组件及其属性(如角色、名称、状态)。智能体可以解析它来获得比截图更可靠的 GUI 结构信息。
推理 (Reasoning)
- CoT (Chain-of-Thought) :思维链。一种提示技术,通过引导 LLM 在回答问题前,先输出一步一步的推理过程,从而提高其在复杂逻辑问题上的表现。
- ToT (Tree-of-Thoughts) :思维树。CoT 的一种演进,它将推理过程组织成树状结构,允许模型在每一步探索多个不同的推理路径,并通过评估来选择最优分支,从而进行更深思熟虑的规划。
- ReAct (Reasoning and Acting) :一种框架,将推理(Reasoning)和行动(Acting)交错进行。模型不仅生成思考过程,还会生成需要执行的动作(如调用工具),并根据动作返回的结果来调整下一步的思考和行动。
- DPPM (Decompose, Plan in Parallel, and Merge) :分解、并行规划与合并。一种任务规划范式,先将复杂任务分解为独立的子任务,然后并行地为所有子任务生成计划,最后再将这些子计划合并成一个连贯的全局计划。
记忆 (Memory)
- RAG (Retrieval-Augmented Generation) :检索增强生成。一种结合了信息检索和文本生成的技术。在生成回答前,模型首先从一个外部知识库(如向量数据库)中检索相关信息,然后将这些信息作为上下文来生成更准确、更具事实性的内容。
- AWM (Agent Workflow Memory) :智能体工作流记忆。一种从过往成功经验中自动总结、归纳出可复用的“工作流”或“程序”的记忆机制,用于在未来指导相似任务的执行。
| 






 订阅
订阅