| 编辑推荐: |
本文主要探索ROS2.0时代到底带来了哪些改变
,希望对您的学习有所帮助。
本文来自于知乎,由火龙果软件Alice编辑、推荐。 |
|
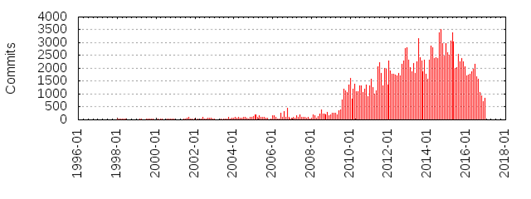
ROS刚刚度过了9岁生日,这九年以来,无论国外还是国内,越来越多机器人开发者或者机构选择ROS,同时也为社区贡献了更多更优秀的代码,从下边这张图我们可以看到,这种成长几乎是指数级的。
2007年11月, Willow Garage公司孕育许久的一个宝宝终于诞生了,并且取名叫做 ROS, Willow Garage 专门为他设计了一个机器人玩具——PR2, 没想到,ROS宝宝悟性极强,很快就学会了怎么玩这个PR2, Willow Garage 发现ROS宝宝潜力很大,就 继续教ROS宝宝学习更多通用机器人软件包的知识,让他学会了怎么去玩更多的机器人,就算遇到一个新的机器人,也可以将以前学到的知识运用到上边,继续愉快的玩起来。但是那个时代,毕竟ROS宝宝可以玩、会玩的机器人少,主要就是玩PR2,于是迫于局限,也存在一些性格上的不足:
只能同时玩一个机器人,多机器人就不会玩了。
脑力有限,只能依靠自身的资源做心算,如果要玩的功能太复杂,就心有余而力不足了。
脑子转的慢,没有实时性,有的时候会算不过来。
神经系统不发达 ,自身的各个关节部分都需要保持良好的连接,各部分通讯数据量有点大。
还只能在实验室或者研究机构里托管,不能让他带着机器人和大众玩。

但是 Willow Garage相信自己的孩子,并且把该上小学的ROS放到了社区这个学校里,接收世界各地开发者老师的培养和教育,这也让ROS接触到了众多资源,激发了他内心强大的学习欲望,并且一路从小学到初中到高中,成绩越来越好,最后以名列前茅的成绩考入了理想的大学 。 在这段成长最重要的时光里,我们确实可以看到,ROS已经不是当年的宝宝,也不仅仅会玩PR2、TurtleBot等机器人,在轮式机器人、类人机器人、工业机械臂、自动驾驶汽车、探索飞船、救援车辆等领域,都已经可以看到这位ROS小朋友勤奋努力的身影。而且他已经不是当年那个会打碎花瓶的熊孩子,他逐渐成长为一个教养有佳的翩翩少年,他带着不少服务机器人走进了人类的日常生活,同时和农业机器人、工业机器人一起,为人类的生产生活贡献着力量,最酷的是,NASA的叔叔阿姨还让他搭乘 Robonaut 2去了国际空间站,曾经那些欺负他的小朋友( MSRDS等 ),不仅没有打倒他,还让他学会了吸星大法的内功,现在在机器人领域,几乎无人能敌。

但是ROS并没有骄傲,在上大学里,他发现了一个全新的世界。那里有很多课程需要他去学习,他第一次接触到那么多从来没听说过的新技术,而这些技术都是他的 基础课程:
1.Zeroconf: 零配置网络服务规范, 用于自动生成可用IP地址的网络技术,不需要额外的手动配置和专属的配置服务器。
2.Protocol Buffers: Google公司开发的一种数据描述语言,类似于XML能够将结构化数据序列化,可用于数据存储、通信协议等方面, 它不依赖于语言和平台并且可扩展性极强。
3.ZeroMQ (and the other MQs): 一个简单好用的传输层,像框架一样的一个socket library,他使得Socket编程更加简单、简洁和性能更高。
4.Redis: 一个高性能的key-value数据库 。
5.WebSockets: HTML5开始提供的一种浏览器与服务器间进行全双工通讯的网络技术。
6.DDS (Data Distribution Service): 新一代分布式实时通信中间件技术规范,DDS采用发布/订阅体系架构,强调以数据为中心,提供丰富的QoS服务质量策略,能保障数据进行实时、高效、灵活地分发,可满足各种分布式实时通信应用需求。

在学习以上这些基础技术课程的基础上,ROS需要灵活应用这些技能,并且在高年级的学习中修炼综合能力:
1.多机器人控制。这个能力厉害了,以后可以同时驾驭多个机器人,别提多炫酷了,必须好好修炼,说不定还能靠此技能吸引异性呢。
2.多平台应用支持。这个能力要求ROS要学会大丈夫能屈能伸,不仅要能在性能强劲的计算机上跑,还要能在资源有限的嵌入式平台上跑。
3.实时应用支持。这个需要好好修炼内功,让自己完善时间管理能力,说几点起就几点起,说几时完成任务就几时完成任务。
4.增强网络通信能力。这个能力正是ROS所需要的,原来上100楼,走到50楼还得缓冲一下,这门课就是教ROS如何上100楼大气不喘的,就算楼要倒,还能飞起来。
5.产品应用。这个能力要求ROS具备更强的可靠性,以后就可以带着更多机器人去到更多普通人的家里玩了。
6.灵活构建。这是个学习能力,要求ROS学习更多的新特性,无论面对多么复杂的机器人系统,都可以轻松应对。
这么多的课程需要学习,这么多的能力需要修炼,这个大学生涯对于ROS可不轻松了。
ROS就像一个孩子,在加速成长的过程中,也需要不断适应外部坏境的发展,吸收更多与时俱进的技术,从而使自己更加优秀 强壮 。相信等到他毕业之时,必将是一个全新的自我,我们可以使用全新的API与他交流,他也会变得更加优秀,不仅依然会玩曾经的机器人,还可以玩好更多机器人,甚至可以玩机器人领域之外的东东。他并不会在原有基础上查漏补缺,而是脱胎换骨的涅磐重生,从少年成长为青年,更加蓬勃也更加好强,带着多年所学,立志闯出大好未来 。 所以,他也应该有一个全新的名字——ROS 2.0。

ROS已经走过九个年头,伴随着机器人技术的大发展,ROS也得到了极大的推广和应用。尽管ROS还存在不少的局限性,但是ROS社区内的功能包还是逐年呈指数级上涨,为机器人开发者带来了巨大的便利。不少开发者和研究机构还针对ROS的局限性进行了改良,这些局部功能的改善往往很难带来整体性能的提升,机器人开发者对新一代ROS的呼声越来越大,ROS2.0的消息也不绝于耳,终于在ROSCon 2014上,ROS正式发布了新一代ROS的设计架构( Next-generation ROS: Building on DDS ),2015年8月第一个ROS2.0的 alpha版本 落地,在经过一年多的开发,2016年12月19日,ROS2.0的 beta版本 正式发布。众多新技术和新概念应用到了新一代的ROS之中,不仅带来了整体架构的颠覆,更是增强了ROS2.0的综合性能。

上图是ROS2的目标,也是目前存在与ROS1中的问题,至于如何解决,就让我们慢慢探索ROS2.0时代到底带来了哪些改变。
一、 ROS2.0 的架构
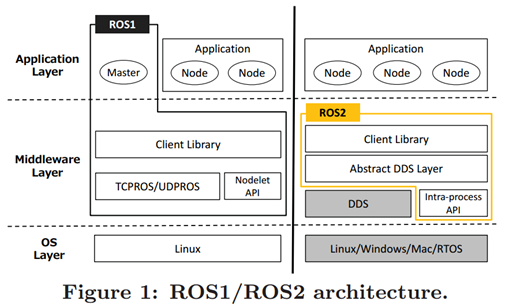
上图所示是ROS2与ROS1整体架构的对比,我们来一左一右找不同:
1.ROS1主要构建于Linux系统之上,一定有很多同学希望在windows或者RTOS上应用ROS开发机器人,原来这个期望是很难实现的,但是ROS2带来了改变,支持构建的系统包括Linux、windows、Mac、RTOS,甚至没有操作系统的裸机。
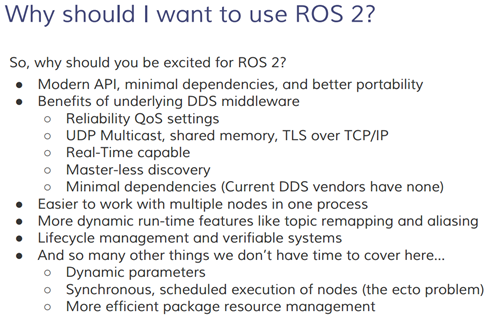
2.ROS1的通讯系统基于TCPROS/UDPROS,强依赖于master节点的处理,可以想像master一挂,整个系统会面临如何的窘境。但是从右边ROS2的架构中我们可以发现,之前让人耿耿于怀的master终于消失了,ROS2的通讯系统是基于DDS的(至于什么是DDS,下节详解),同时在ROS2内部提供了DDS的抽象层实现,有了这个抽象层,用户就可以不去关注底层的DDS使用了哪个商家的API。
3.ROS中最重要的一个概念就是 “ 节点 ” ,基于发布/订阅模型的节点使用,可以让开发者并行开发低耦合的功能模块,并且便于进行二次复用。得益于DDS的加入,ROS2的发布/订阅模型也会发生改变,具体下节再讲。
4.你肯定还关注到了两个很重要的独立模块,那就是 “ Nodelet ” 和 “ Intra-process ” 。在ROS1的架构中 Nodelet 和TCPROS/UDPROS是并列的层次,当然也是负责通讯的,实际上Nodelet是为同一个进程中的多个节点提供一种更优化的数据传输方式。ROS2中也保留了这种数据传输方式,只不过换了一个名字,叫 “ Intra-process ” ,同样也是独立于DDS。
可以看到,架构的大部分不同都是应为DDS的引入,那么到底什么是DDS?DDS又有什么超能力可以改变ROS呢?
二、 DDS 是何方神圣 DDS 的全称是 Data Distribution Service ,即数据分发服务。这个 DDS 也并不是一个很新鲜的东东,大概在十几年前就已经出生了,应该属于 00 后。它是对象管理组织 OMG (哦买嘎! Object Management Group )在 2004 年正式发布的一个专门为实时系统设计的数据分发 / 订阅标准,最早应用于美国海军, 解决舰船复杂网络环境中大量软件升级的兼容性问题,目前已经成为美国国防部的强制标准,同时广泛应用于国防、民航、工业控制等领域, 成为分布式实时系统中数据发布 / 订阅的标准解决方案。 DDS 的技术核心是以数据为核心的发布订阅模型( Data-Centric Publish-Subscribe , DCPS ),这种 DCPS 模型创建了一个 “ 全局数据空间 ” ( global data space )的概念,所有独立的应用都可以去访问。在 DDS 中,每一个发布者或者订阅者都成为参与者( participant ),类似于 ROS 中节点的概念。每一个参与者都可以使用某种定义好的数据类型来读写全局数据空间。看到这里,你是不是想起来了 ROS1 中的订阅发布 / 模拟模型,是不是感觉好像和 DDS 也差不了多少。那就让我们来对比一下两者的模型,看看到底差多少?
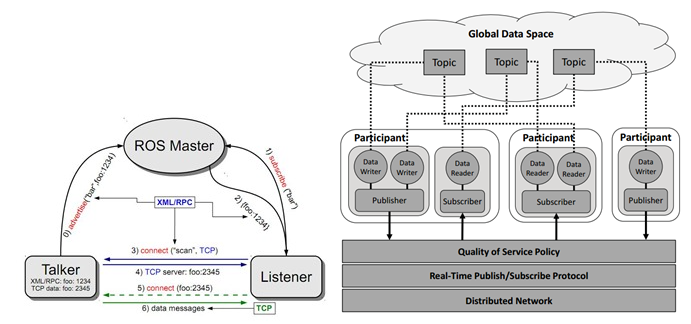
上图左边是 ROS1 的订阅 / 发布模型,右边是 ROS2 使用的 DDS 的订阅 / 发布模型,乍一眼看上去,感觉就是 DDS 增加了更多的框框,那么这些框框是干什么的呢? 我们先来回顾一下。在原来的 ROS1 中,一个节点想要发布消息,需要现在 master 中注册一下,让 master 知道你这个节点要干什么。另外一个节点想要订阅消息,那么他就需要去问问 master 哪里有这个消息, master 发现这两个节点相互之间 “ 有意思 ” ,于是就当个月老牵个线,把 IP 地址告诉他们,接下来两个节点就开始私聊,也就没有 master 什么事了,就算两个节点闹矛盾联系不上, master 也管不着。 DDS 中的模型就人性化多了:
1.参与者( Domain Participant ):一个参与者 Participant 就是一个容器,对应于一个使用 DDS 的用户,任何 DDS 的用户都必须通过 Participant 来访问全局数据空间。
2.发布者( Publisher ):数据发布的执行者,支持多种数据类型的发布,可以与多个数据写入器( DataWriter )相联,发布一种或多种主题( Topic )的消息。
3.订阅者( Subscriber ):数据订阅的执行者,支持多种数据类型的订阅,可以与多个数据读取器( DataReader )相联,订阅一种或多种主题( Topic )的消息。
4.数据写入器( DataWriter ):应用向发布者更新数据的对象,每个数据写入器对应一个特定的 Topic ,类似于 ROS1 中的一个消息发布者。
5.数据读取器( DataReader ):应用从订阅者读取数据的对象,每个数据读取器对应一个特定的 Topic ,类似于 ROS1 中的一个消息订阅者。
6.主题( Topic ):这个和 ROS1 中的 Topic 概念一致,一个 Topic 包含一个名称和一种数据结构。
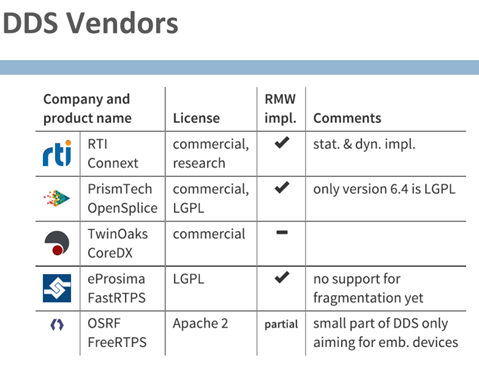
7.QoS Policy : Quality of Service ,质量服务原则,这个模块在 ROS1 中可从没见过,看名称就猜测应该是负责数据质量的。 QoS 是 DDS 中非常重要的一环,控制了各方面与底层的通讯机制,主要从时间限制、可靠性、持续性、历史记录几个方面,满足用户针对不同场景的数据应用需求,可以参考下边的图片和表格,看一下这几个原则可以哪些配置。
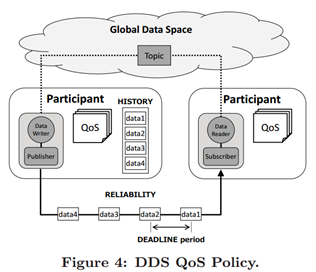
从上边 DDS 的几个重要概念中,我们就可以看到 ROS2 相比于 ROS1 ,在以下方面有所提升:
1.实时性增强:数据必须在 deadline 之前完成更新。
2.持续性增强: ROS1 尽管存在数据队列的概念,但是还有很大的局限,订阅者无法接收到加入网络之前的数据; DDS 可以为 ROS 提供数据历史的服务,就算新加入的节点,也可以获取发布的所有历史数据。
3.可靠性增强:通过 DDS 配置可靠性原则,用户可以根据需求选择性能模式( BEST_EFFORT )或者稳定模式( RELIABLE )。
到此为止,我们应该已经对 ROS2 有一个大概的认知了,具体的很多技术细节今后再慢慢探索。
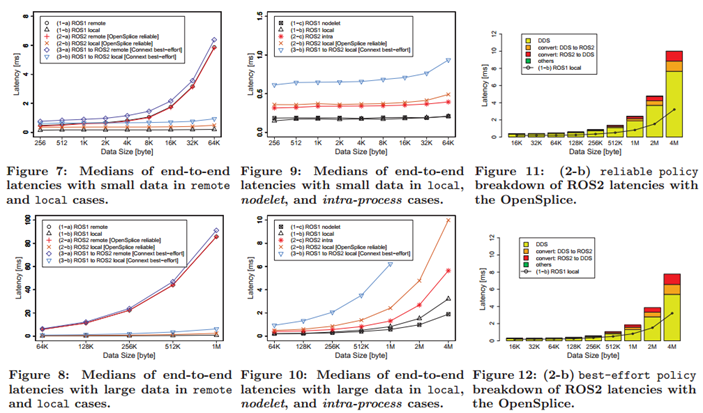
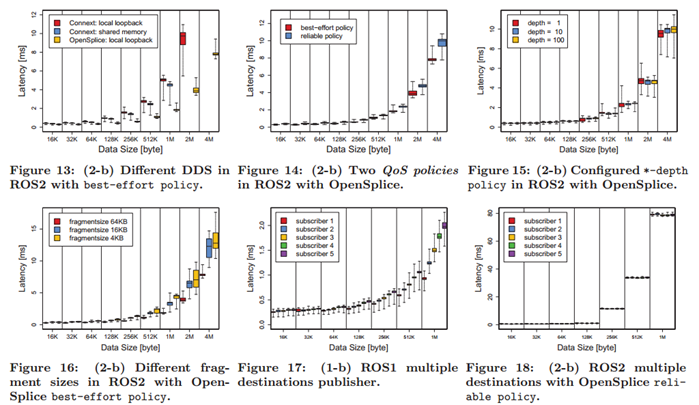
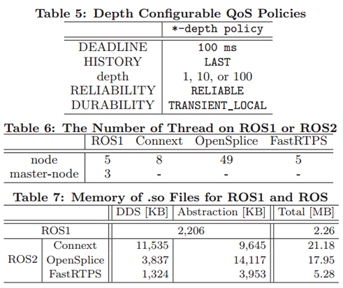
三、 ROS2 vs ROS1 框架看来终觉浅,本文的最后一节,我们来看看目前 ROS2 与 ROS1 相比,性能到底如何?这里的所有对比数据和图片来自于论文《 Exploring the Performance of ROS2 》。 在这篇论文中,作者针对 ROS1 和 ROS2 在延时、吞吐量、线程数、内存消耗等几个方面的性能进行了量化对比,数据量从 256byte 到 4M ,实验条件覆盖了 ROS 分布式的多种使用场景,具有一定的参考价值,也是目前对 ROS2 性能方面量化分析的唯一论文,不过需要注意的是论文使用的 ROS2 是 Alpha 版本。

厚脸无耻的盗用一些对比结果:
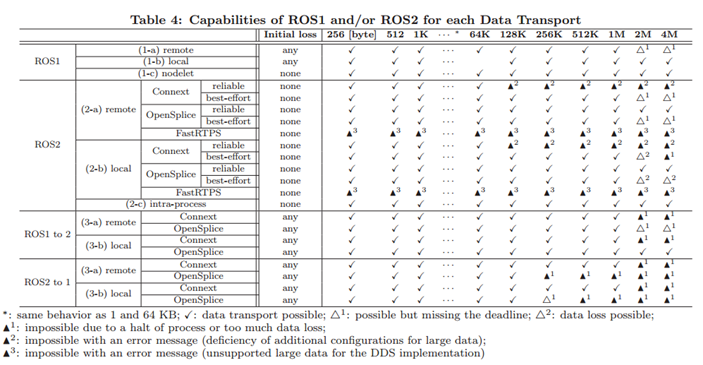
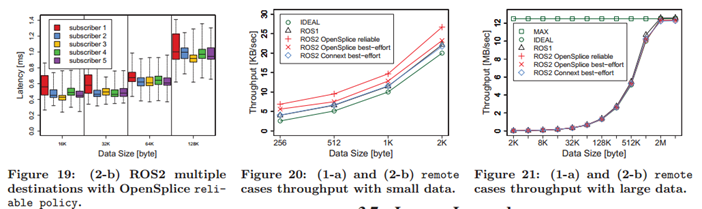
如果对这个比较感兴趣的同学,可以下载这篇论文仔细看一下,其中还有作者的对比解释,我就不在这里赘述了(啃了两个多小时,看完即忘完),只说一下我的几点感想:
1.根据作者的对比数据,我们可以发现 ROS2 的性能在不同数据量的场景下,表现呈指数级变化,应该是大数据在底层传输的一些处理时间导致的。
2.不同厂商的 DDS 产品性能表现,相差巨大,应该根据不同的应用场景选用最佳的 DDS 产品。
1.QoS 提供了多种配置选项,同样需要根据不同的应用场景,选择最适合自己的配置。
2.ROS1 会丢失初始数据,这一点我只前还没有发现, ROS2 看上去在这一点上好了不少。
3.ROS2 目前的整体性能(论文中使用的 Alpha 版本)并不如 ROS1 ,毕竟还处于开发阶段,而且对 DDS 的特性支持有限,但是毕竟潜力在那里
OK ,本文洋洋洒洒就到这里,路漫漫其修远兮,吾将上下而求索。最后再来一张图片, Why should I want to use ROS2?
| 






 订阅
订阅