| 编辑推荐: |
本文首先将AutoML划分成了如下几个流程 ,
先是数据准备,然后是特征工程,接着是模型生成,最后就是模型评估了
,然后主要介绍
NAS
,希望对您的学习有所帮助。
本文来自于 算法码上来 ,由火龙果软件Alice编辑、推荐。 |
|
介绍
首先这篇综述是讲AutoML的,不单单是NAS,但是因为NAS是AutoML中最最重要的一部分,所以主要篇章还是用来讲NAS了。据作者所说,应该是第一篇完整讲述AutoML整个流程的综述。
首先,本文将AutoML划分成了如下几个流程:
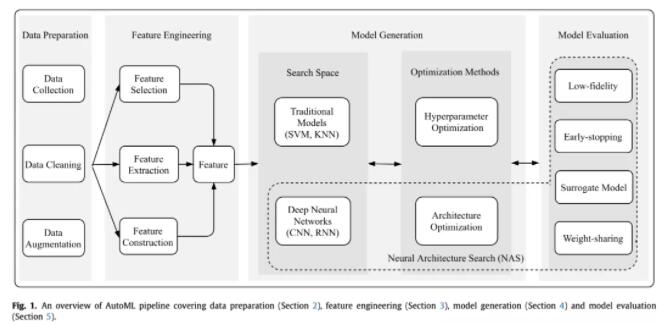
先是数据准备,然后是特征工程,接着是模型生成,最后就是模型评估了。其中模型生成又可以分为搜索空间和优化方法,搜索空间有传统的ML模型或者DL模型,优化方法又分为超参数优化和结构优化。NAS的话主要就涉及到DL模型的搜索空间定义、结构优化和模型评估策略这三块。
因为我主要关注NAS这块,所以其他部分就只简单介绍一下,不做过多解读。
数据准备
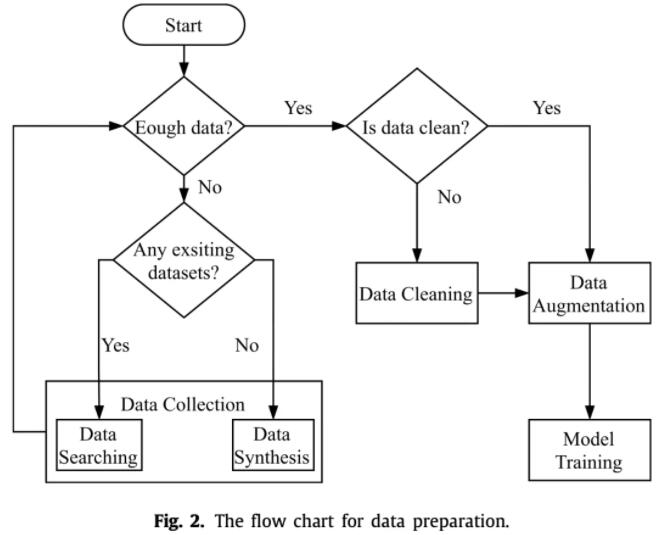
看上面这个图应该很清楚了,数据准备主要分为数据收集、数据清洗和数据增强三个部分。
数据收集
有开源的就去下开源的,没开源的就去互联网上爬,要是什么都没有呢,那就通过GAN之类的技术来生成伪数据,有总比没有好嘛。
数据清洗
就是清洗数据中的噪声、脏数据,这一过程可能需要一些知识去判断什么是噪声。还有一个研究主题就是如何清洗每天更新的源源不断的新数据。
数据增强
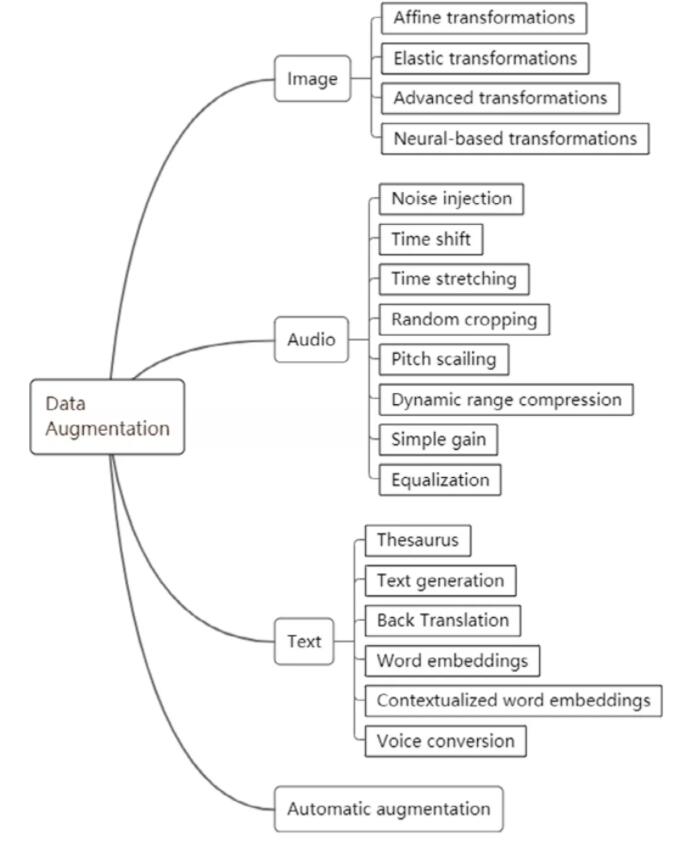
数据增强某种程度上也可以被视为数据收集的一种工具,因为效果都是一样的,增加了新数据。但是它的目的有所不同,主要是为了防止模型过拟合。上图针对不同数据有很多增强方法,这里就不介绍了。
特征工程
有句话叫:数据和特征决定了机器学习的上界,而模型和算法只是为了去近似这个上界。主要可以分成三块,特征选择、特征构建和特征提取。这里也不多介绍了,因为在DL里特征工程用得很少,DL模型可以自己从数据中学出特征,很少需要自己手动构造特征了。
模型生成
从这块开始进入到了NAS的领域。之前说了,搜索空间分为ML和DL两块,本文只关注DL,而优化方法又分为超参优化和网络架构优化,本文也主要只关注网络架构优化,因为超参优化是挑选出最优网络架构之后的事情了,不过也有工作将NAS用在超参优化上的,这个就不在讨论范围内了。
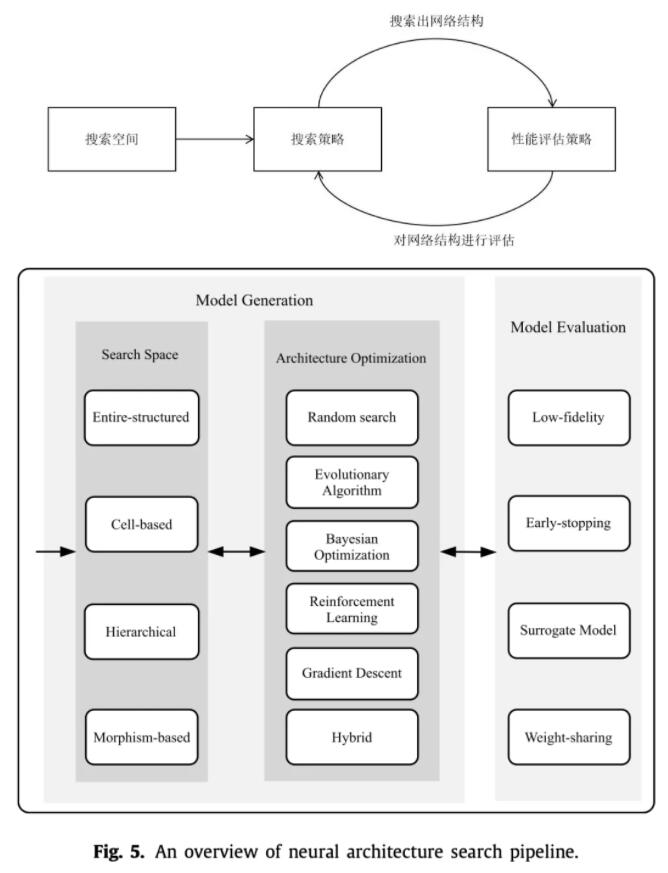
上面两张图是NAS的一般流程:
- 首先针对不同的任务定义一个搜索空间,这个搜索空间就决定了你搜出来的网络架构可能长什么样子,也决定了你搜出来的架构可能性有多少,当然是越大越好,但是带来的后果就是搜索速度太慢。
- 然后在这个搜索空间里进行搜索,采样出一个比较好的模型架构,这里方法就非常多了,最简单的就是随机搜索,随机采样一个网络架构。
- 最后就是在训练集上评估你采样出的架构效果,反馈给架构优化,让它优化,然后继续采样,循环下去。评估方法也有很多,最简单的就是像正常训练模型那样完整训练一遍,得到效果,但是这样太慢了,因此需要其他方法来加速训练或者估计效果。
搜索空间
神经网络可以看作是一个DAG,而如何定义这个DAG,其实你可以用生成图的方式做加法生成它,也可以做减法,从大图中抽取出子图等等,有很多方法。
定义搜索空间需要人类知识,这一步目前还不够Auto,定义的好,生成出来的架构才可能好。而有些工作发现只要你搜索空间定义的足够好,随机搜索都能达到和各种架构优化方法相似的效果,那么NAS将变得毫无意义,所以这一块还是挺玄学的。
整体结构搜索
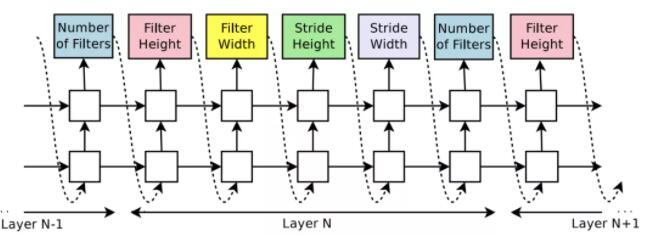
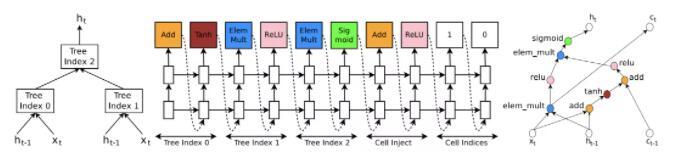
就是按照DAG的拓扑序,依次生成出模型架构出来。一般来说,用一个RNN来生成,每生成一个node,都要预测出它的输入是哪些node(残差)、作用在它上面的op有哪些。
但是这种方法太慢了,搜索的复杂度是指数级别的,因此在最初的几篇RL论文里,都用了几百个GPU训练了几十天才搜出来,穷苦人家可搜不起。
cell搜索
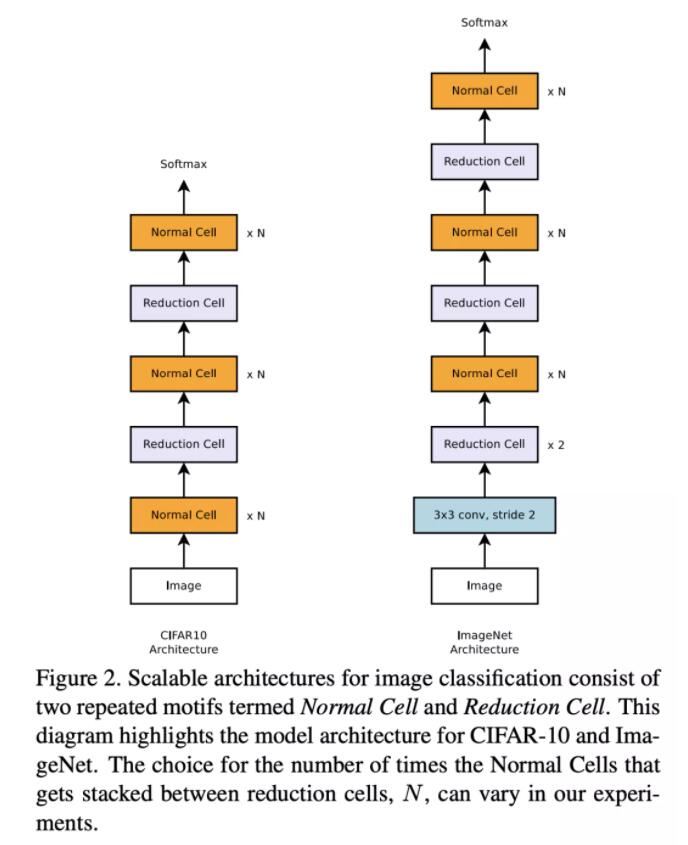
这种方式也是借鉴了人类设计神经网络的经验,像ResNet系列都是将一个个cell层层堆叠得到的,因此如果只搜一个cell,然后将相同的cell堆叠起来岂不是大大减小了搜索空间。后面的很多工作都是基于cell来搜索的,比如NASNet。
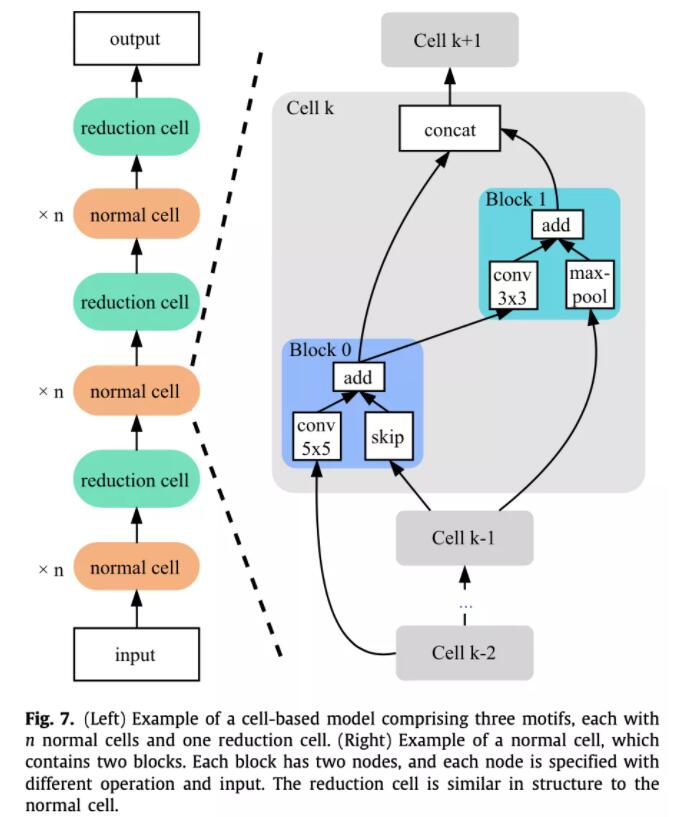
在NASNet中,cell被分成了两种,一种是normal cell,它的输入输出维度保持相同,另一种是reduction cell,它的结构和normal cell相似,但是输出的宽度和高度减半,通道数加倍。
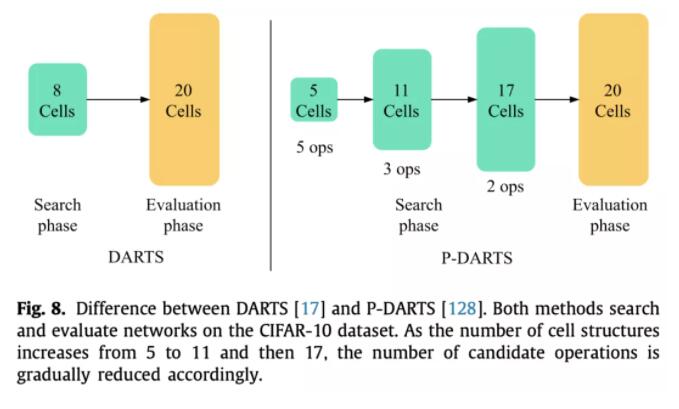
最后搜索出最优cell之后,根据需要堆叠不同层数的cell就行了,这个层数也是人为定义的。但是这里就会存在一个训练和评估不一致的问题,一般来说,在搜索的时候,为了减小显存占用,会堆叠比较少的层数去评估。但是在得到最优cell之后,用来retrain时会堆叠比较多的层数,这里就不一定是最优解了。也有工作做这方面的优化,比如P-DARTS,在搜索阶段逐渐增加堆叠的层数。
分层搜索
当然搜索cell也是存在问题的,忽视了整体结构的优化,而且每一层的cell相同也不一定最好啊。因此后来的工作又提出了分层搜索的方法。
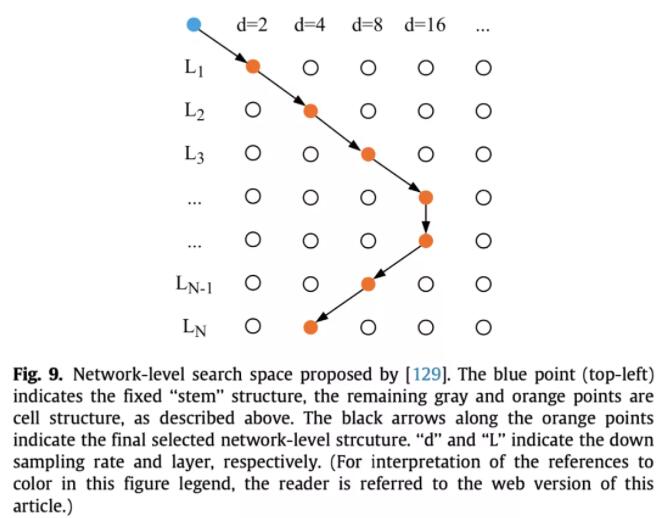
比如Auto-deeplab在搜索cell的同时,还搜索了不同层的分辨率,下一层的分辨率可以是一半、不变或两倍,这一步限制一是为了减小搜索空间,二是为了增加稳定性,防止分辨率变化太大。
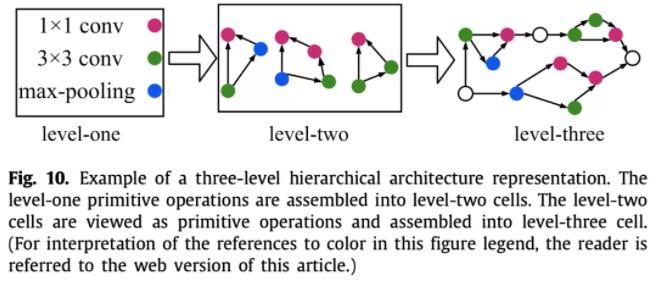
再如HierNAS,按照层次结构来搜索网络架构,第一层是一些原子操作,第二层用这些原子操作生成一些比较小的网络,第三层用第二层的小网络再搭建出一个更大的网络,依次下去。
再如progressive NAS,为了减小一个cell里面的搜索空间大小,从一个cell里面只有一个block开始搜索,每次挑出top-k个cell,在基础上衍生出两个block,依次下去。评估性能用的是代理模型直接预测,不需要真的训练一遍。
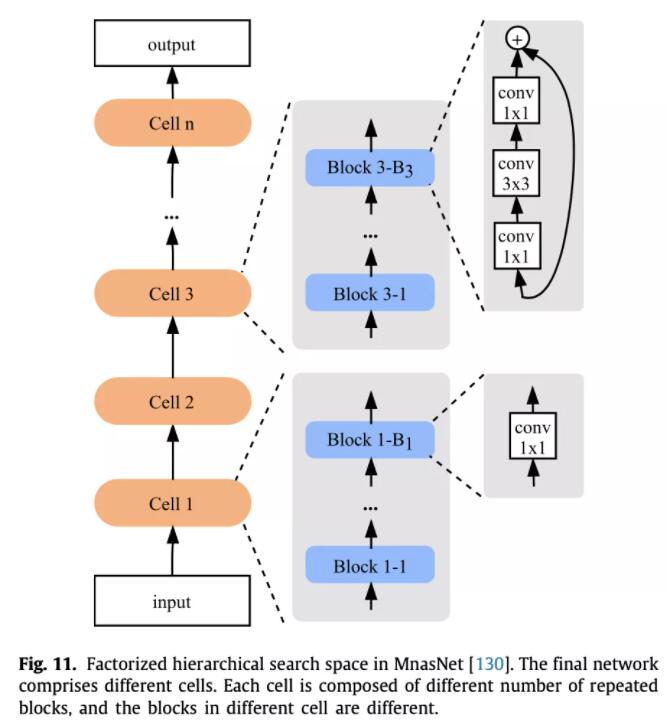
再如MnasNet,它将整个网络分为了若干个cell,每个cell串行了若干个block,每个cell的block数量可能不同,而单个cell里面的block结构是相同的,这样就考虑到了整体的网络搜索空间。和堆叠cell不同的是,每个block的结构比较简单,不然的话整体上搜索复杂度还是太大了。当然这篇主要还是为了做移动端部署,因此做了多目标NAS,将延时也考虑到了目标函数中去。
之前的方法还存在一个问题,就是基本都是在小数据集上做的搜索评估,最后将最优结构运用到大数据集上,这就存在不一致性。因此例如ProxylessNAS就直接在大数据集上搜索评估,为了减小显存消耗,采用BinaryConnect,每次只激活两个结点之间的一条边。
网络态射
这类方法主要思想就是在已经训练好的成熟网络基础上增加宽度、深度等等,继承父网络的参数,加速子网络的训练。
首先是Net2Net,扩展分为两个方向,一种是宽度上的,一种是深度上的,不能同时进行。
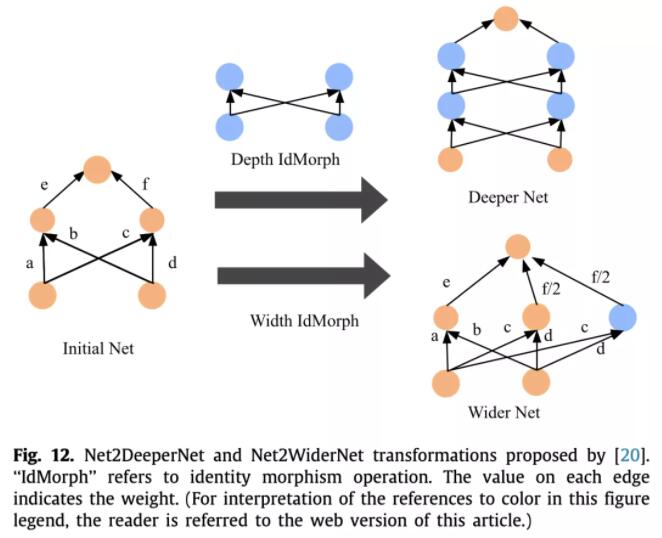
因此后来就有了网络态射,可以处理任意线性层和非线性层,并且深度和宽度上可以同时扩展。
架构优化
定义好搜索空间后,就要采用架构优化算法来搜索出最优的架构了。
演化算法
演化算法就是模仿的生物进化过程。首先要对网络架构进行编码,方便之后的操作。可以将图结构编码为二进制串,但是这样固定长度不灵活。于是就有了Cartesian genetic programming、Neuro evolution of augmenting topologies、Cellular encoding等各种编码方法,详细就不介绍了。
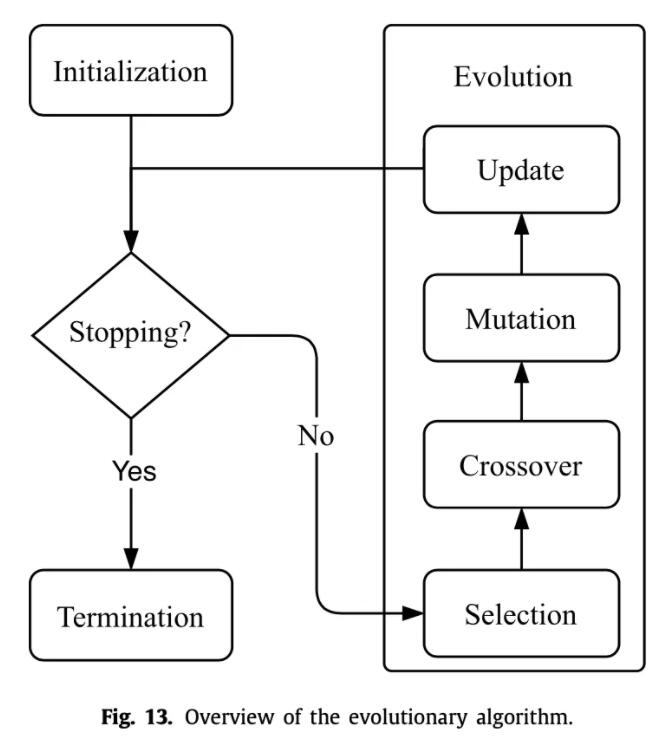
一般演化算法分为四步:选择、交叉、变异、替换。
- 选择。就是从候选的网络架构中挑选出适应度最高的,一种可以直接挑绝对值最高的,另一种可以挑相对值最高的,第三种比较有名的是锦标赛选择算法,也就是放回抽样,每次等概率随机选k个,挑出最好的那一个,进入下一代,其余放回,重复上述操作。
- 交叉。交叉方式和编码方式有很大关系,
- 变异。上面两步做完后,有很多方式可以对个体进行变异,比如随机翻转某一位,随机增加或者删除两层之间的连接等等。
- 替换。新的个体加入种群后,旧的个体要被删除掉。可以删除最久之前的,也可以删除效果最差的,也有工作一个都不删除,只要你内存和时间顶得住。
强化学习
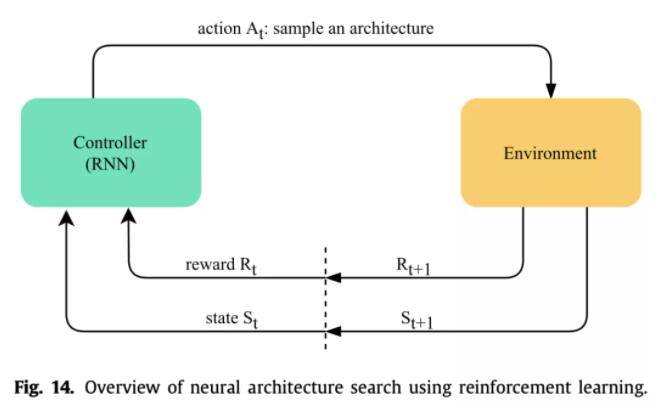
强化学习主要思想就是用一个控制器(一般是RNN)来生成网络架构,然后评估得到得分作为反馈更新控制器参数。有用策略梯度的,也有用Q-learning的,还有用PPO算法的等等。第一篇NAS论文就是用的RL,但是这一类方法普遍很费卡,一般人玩不起。
梯度下降
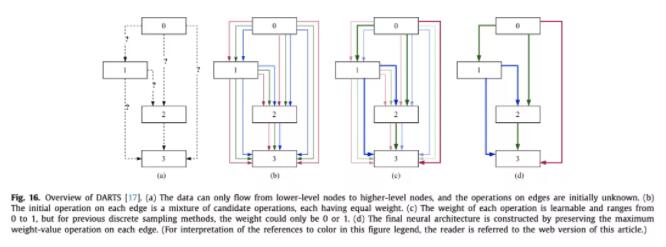
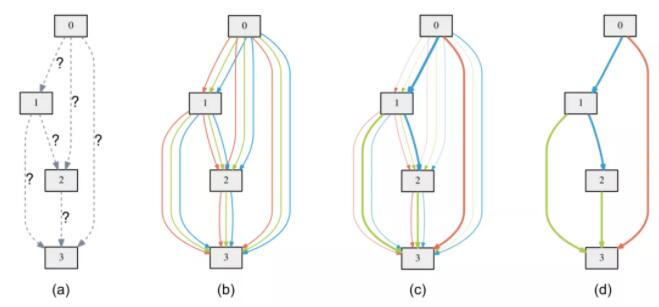
前两种都是在离散空间搜结构,梯度下降方法是将离散空间变为了连续空间。第一个提出的是DARTS,在两个结点之间定义了若干种操作,然后做softmax,最后在评估的时候取argmax。
这种方法也有不好,比如成倍增加了显存,本来一条边现在需要成倍的计算量,此外用了代理任务,在小数据集上训的层数比较少,迁移到大数据集上层数又很多。也有解决方法,比如P-DARTS,随着训练进行逐渐加层数,为了减小计算量,还逐渐减少了每条边上的操作数。而GDAS每次只选概率最大的那个操作边做前向,反向传播用gumbel softmax。
两套参数联合优化也是很困难的,DARTS用的是交替优化,一次优化结构参数,一次优化模型权重。
最后还有个问题,就是搜索后期会倾向于搜索残差连接之类的操作,这不好。于是DARTS+发现一个cell里出现两个或以上残差连接后就直接停止。P-DARTS则是给残差加了正则化,减小出现的次数。
代理模型
这一类方法(SMBO)使用一个代理模型来指导最优模型的生成。传统的方法有贝叶斯优化(高斯过程、随机森林、TPE等等),就不详细介绍传统方法了。
也有用神经网络当作代理模型的,比如PNAS、EPNAS、NAO都用一个LSTM或者MLP将离散的结构编码成连续的表示,然后预测性能,接着找出性能最高的最优表示,用解码器还原出离散的结构。
网格和随机搜索
这就是最原始最普通的优化方法,比如直接在搜索空间随机搜索结构,然后评估,最后取最优的就行了。虽说随机搜索听起来不大行,但实际出来的效果,能和大多数NAS方法达到相似效果,还很简单。
混合优化方法
上面这么多方法混合在一起,可能效果会更好。演化算法是全局优化的,鲁棒性很强,但是随机性有点大,不稳定,计算消耗也大。强化学习也是的,训练很不稳定。梯度下降方法训练快,但是需要提前定义好超网络结构,限制了结构的多样性。
演化算法可以结合强化学习、梯度下降、SMBO,梯度下降也可以结合SMBO等等,这里就不详细介绍了,典型的例子有Evo-NAS、NAO等等。
超参优化
这一步其实是脱离了NAS的,就和一般的超参优化一样,网络搜索、随机搜索、贝叶斯优化、梯度优化等等方法,这里不做过多介绍了。
模型评估
在模型生成之后,需要对模型进行评估,然后指导架构优化模块生成更好的架构。最一般的方法就是从头开始训练到收敛,但是这样太慢了,一般都要生成个几百万以上的架构的,训练时间太久了。
低保真度
可以在评估时降低数据集的分辨率,降低cell堆叠的层数,使用小数据集等等,这样可以快速得到架构的大致效果,但是最后得到的架构可能在目标数据集上不是全局最优的。
权重共享
比如ENAS,可以在多次评估模型性能时,继承之前相同node的参数,可以加快收敛速度。网络态射也是用到了权重共享。
代理模型
直接学习一个预测器,输入是网络架构,输出是它的性能,当然这需要提前先训练一些模型,得到(架构,性能)的若干数据,然后才能学习出这个预测器,PNAS就是这么干的。当然预测器的学习数据肯定不会多,所以SemiNAS就用半监督的方法,利用大量无标注的结构去预测出性能,加入到训练集中继续优化预测器。
early stop
可以只训练几轮,然后根据前期的学习曲线预测出最终的性能。
一些讨论
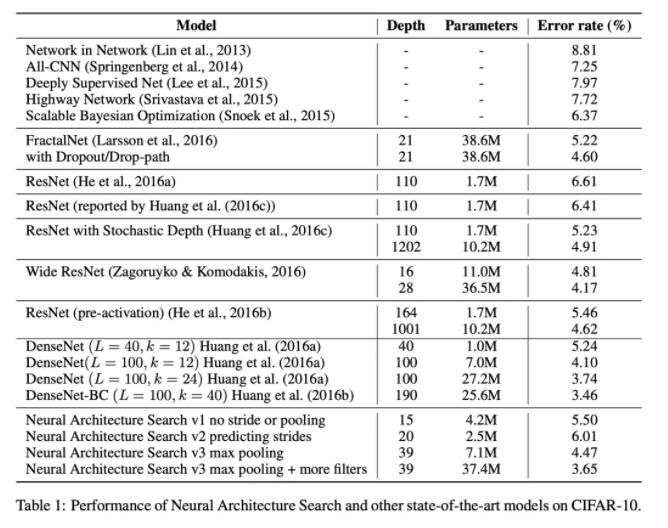
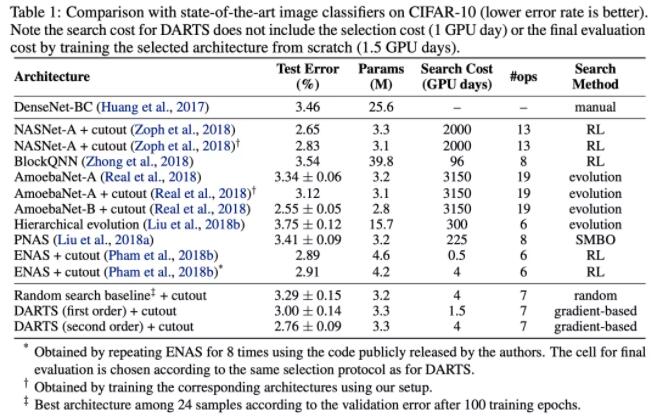
效果对比
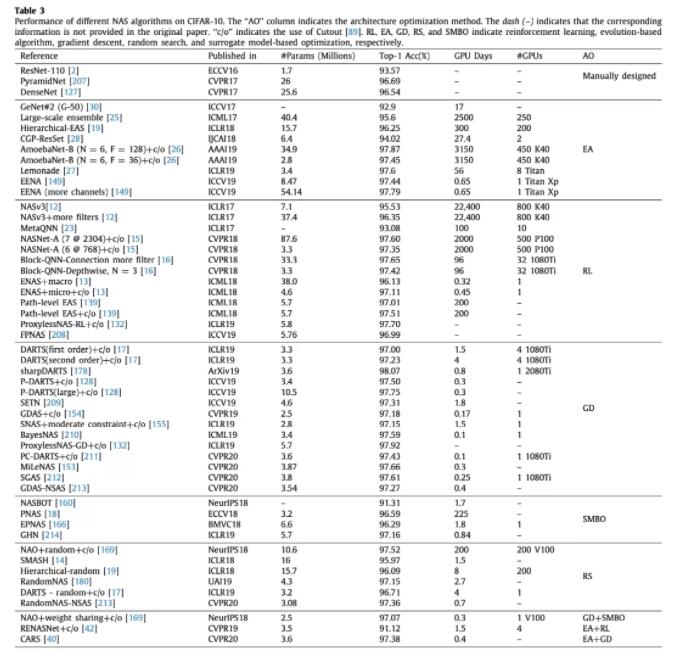
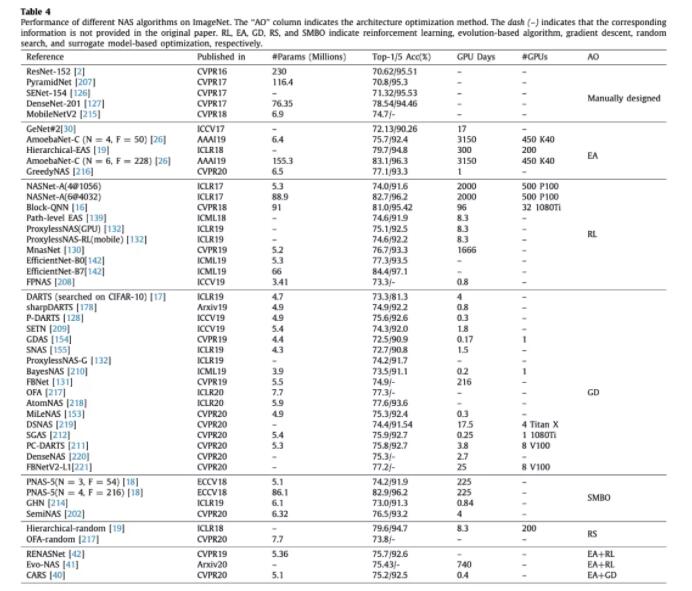
可以看出,演化算法和强化学习搜索时间都非常长,除了个别几个用了权重共享之类技巧的。梯度下降方法全部都挺快的,但是整体效果都不如其他几类方法。
其他
从整体流程上来看,NAS方法还可以分为一阶段和两阶段。两阶段是一般做法,第一个阶段就是搜索评估阶段,选出最好的架构,第二个阶段就是retrain这个最优架构,在验证集上评估。而一阶段就是只需要训练一次超网络,联合优化架构参数和模型权重,之后不需要再retrain了。比如比较有名的Once-for-all,采用了progressive shrinking算法来使得子网络之间的性能相互不受到影响。
NAS还可以分为one-shot和non-one-shot,one-shot意思就是搜索空间重合的,可以重复利用之前的参数,比如ENAS、网络态射、ProxylessNAS等都是的。
大多数NAS都只是把最终的效果当作目标,其实在移动端部署上还要考虑延时、模型大小、计算量等目标,一般都是解帕累托最优,比如MnasNet考虑到了延时。
开放性问题
搜索空间的灵活性
现在的搜索空间基本都还是人为定义的,参考了很多人类设计神经网络的经验,比如原子操作定义成conv、pooling之类的,结构上cell堆叠等等,但是真正的auto应该是模型自动设计网络架构和原子操作,比如AutoML-Zero就用最基本的原子操作(sin、cos、mean、std等)设计出了两层的神经网络。这一块应该是今后的一大方向,例如目前工作主要在CV上,而对于NLP的Transformer模型,搜索空间如何定义的很好?目前工作还寥寥无几,看了几篇也都是堆叠conv,分支结构之类的。
探索更多的领域
如上所说,目前大多数工作都是在CV上,搜的是conv结构,而像NLP、语音等领域探索甚少,像多目标领域也只有很少的工作(韩松老师组工作很多),即使是在CV,任务也大多数局限在CIFAR-10和ImageNet上。
可解释性
搜出来的网络为什么好?现在人类设计的网络大多数都能强行解释一下好处,即使它仍然是个黑盒。但是NAS搜出来的基本看不出设计的逻辑。
可复现
之前也说了,例如演化算法和强化学习这一类方法训练很不稳定,很难复现出结果。很多论文也都只是公开了最好的模型,都不放出源码的(当然我并没有质疑他们),超参数之类的也有些没有公布,这导致我们平民玩家没法复现,没法用啊。而且大家评测的环境都不相同,众说纷纭,没法公平比较,因此也有一些工作提出了NAS统一的数据集来评测。
鲁棒性
如果目标领域数据添加了噪声,可能会对搜出来的模型产生很大影响。所以如何搜出更加鲁棒、能适应不同领域或者有噪声数据的结构可能是未来的一个研究方向。
联合超参优化和架构优化
目前大多数NAS方法都是先搜出最优架构,再调整超参在目标领域上retrain,如何同时学好这两块也是一个方向。
完全的AutoML的pipeline
做到从数据收集开始一直到最后的模型生成训练全部流程化,不需要人为参与,那样才是真正的智能。目前的话有一些比较好的开源工具了,AutoKeras、NNI等等。
终身学习
当新的数据源源不断进来时,当只有少量有标签数据或者有大量无标签数据时,如何做NAS,有几个不错的工作,比如UnNAS是做无监督NAS的,MetaNAS是结合meta-learning的。
经典论文简析
(NAS)[ICLR 17] Neural Architecture Search with Reinforcement Learning
动机
用强化学习来采样网络,生成出最优网络结构,避免人工设计。
方法
用RNN来预测CNN或者RNN的结构,采样结构,下游任务效果作为强化学习得分,策略梯度更新参数。
CNN预定义好层数,LSTM每5层预测CNN一层的5个参数。
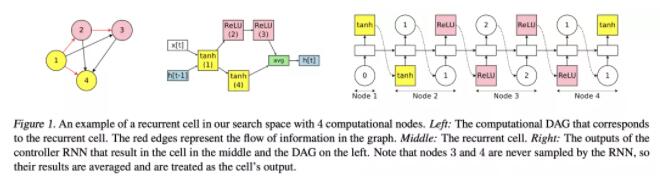
RNN预定义好cell的计算拓扑图,LSTM预测每个node的计算逻辑。
实验
接近人类设计网络的最好水平。速度超慢,800 K40,28天,只适用于小数据集例如CIFAR-10。
评价
强化学习应用到NAS的第一篇论文。
(NASNet)[CVPR 18] Learning Transferable Architectures for Scalable Image Recognition
动机
RL直接搜太慢了,只能用在小数据集,ImageNet之类的大数据集没法用。
方法
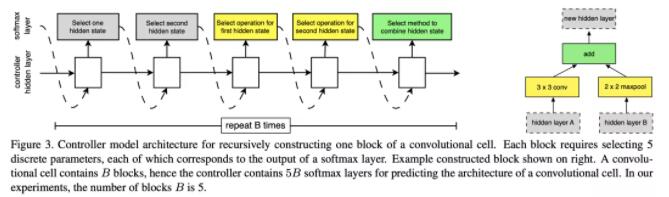
提出了NASNet,用堆叠相同cell的方式减小搜索空间。在CIFAR-10上面学习cell结构,通过增加堆叠层数的方式迁移到ImageNet上去。用PPO替代策略梯度。

选择之前的两个node,分别预测对应op,然后预测合并op。
实验
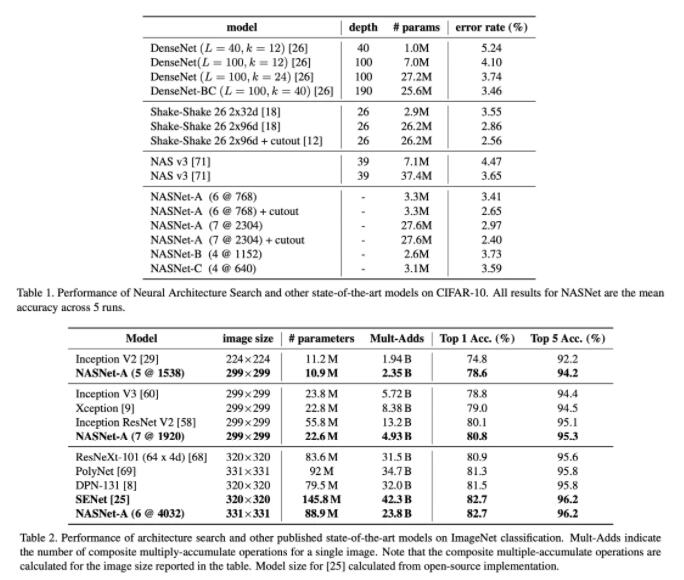
效果和参数量都好于前作,达到了SOTA水平。速度加快很多,500 P100,4天,相比于前作加速7倍。
评价
NASNet,通过cell堆叠加快了结构搜索的速度,同时效果达到了SOTA,并且容易迁移到其他任务上去。

(ENAS)[ICML 18] Efficient Neural Architecture Search via Parameter Sharing
动机
之前的方法采样出一个结构,在dev上得到acc,然后就会抛弃权重,重新采样训练,非常耗时。
方法
定义一个超图,每次搜出的子图共享权重。
对于RNN cell,LSTM的每两个step预测之前某个node作为输入,再预测op,最后出度0的node拼接作为输出。
对于CNN,一种策略是直接生成整个网络,每个node先预测之前哪些作为输入,然后预测op。
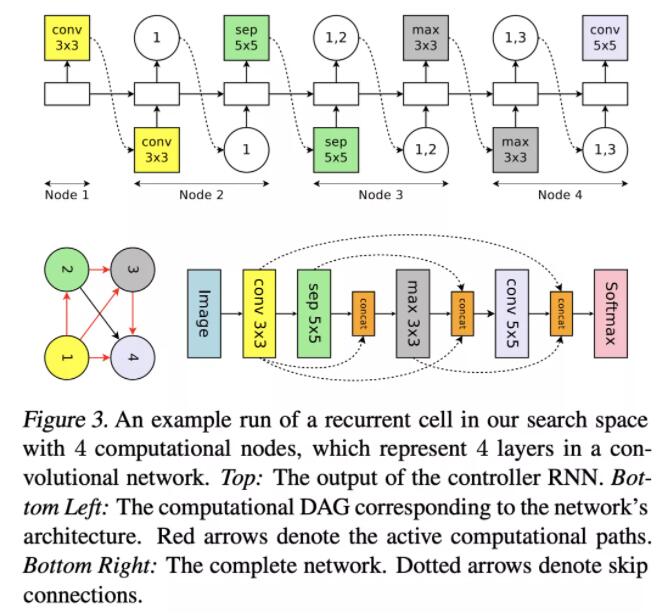
另一种策略和NASNet类似,堆叠cell,搜索空间缩小到一个cell。
实验 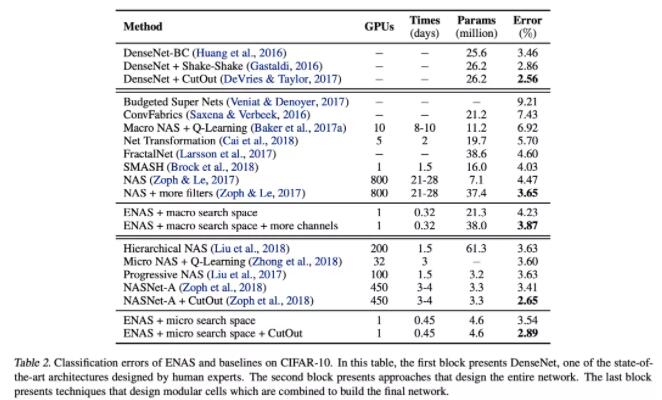
优于NAS和NASNet,1 1080Ti,16小时,相比NAS加速1000倍。
评价
训练速度很快,AutoKeras背后就采用了ENAS。

(DARTS)[ICLR 19] DARTS: Differentiable Architecture Search
动机
离散结构搜索太慢了,采样+验证+反馈的循环很耗时。
方法
连续域结构搜索代替离散域结构搜索,用微分来优化结构。
两套参数:模型参数 (训练集优化)、结构参数 (验证集优化)。
交替优化两套参数,softmax+relax学习最终结构。
实验
效果达到或接近了SOTA,速度上比ENAS慢,比其他的方法快。
评价
第一个用可微分方法做NAS的,第一个连续空间搜索代替离散空间搜索。

[ICLR 19] Rethinking the Value of Network Pruning
动机
现有的剪枝方法存在问题,很多操作不合理,没有必要。
方法
传统剪枝方法基于两个假设:
- 过参数化很重要,训练大模型再剪枝优于直接训练剪枝后的模型。
- 继承大模型参数,再finetune很重要,优于随机初始化剪枝后模型再重新训练。
本文认为都不一定对:
- 对于预定义好的模型,直接训练可以达到和训练-剪枝-finetune相同甚至更好的效果。
- 大模型剪枝后,随机初始化重新训练,效果和继承参数finetune差不多。
所以本文认为剪枝后的结构重要,而参数不是那么重要。
实验
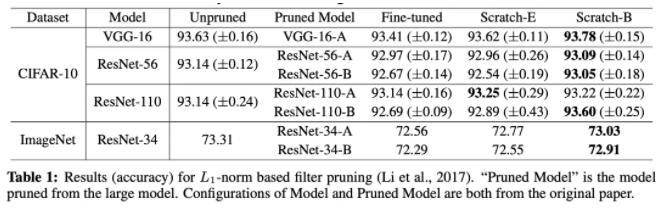
一系列实验结果验证了猜想,此外本文还否定了彩票假设,认为剪枝后随机初始化即可,没必要和原始初始化相同。
评价
仍然有一些局限性,比如数据分布均衡、模型比较大,估计在其他设置下不一定work。而且不如finetune速度快。 |









