| 编辑推荐: |
本文首先介绍了Carla Server、Carla Client以及Driving
Benchmark三个方面,希望本文对大家有帮助。
本文来自于csdn,由火龙果软件Anna编辑、推荐。 |
|
1.Carla Server
Carla目前的稳定版为0.8.2
即可下载,linux解压后命令行执行
这将启动一个全屏的仿真窗口,你能使用WASD驾驶车辆
实验中往往增加各种参数进行配置
$ ./CarlaUE4.sh
-carla-server -benchmark -fps =10 -windowed -ResX=300
-ResY=300
|
carla-server参数表示以服务端模式运行,等待客户端连接
benchmark fps=10 表示仿真中每一个step的时间间隔相同
windowed ResX=300 ResY=300 表示窗口化以及大小

1.1 无界面启动
配置环境变量:SDL_VIDEODRIVER=offscreen 和 SDL_HINT_CUDA_DEVICE=0
程序中可以这么写
my_env = {**os.environ,
'SDL_VIDEODRIVER': 'offscreen', 'SDL_HINT_CUDA_DEVICE':
'0', }
cmd = [path.join(environ.get('CARLA_ROOT'), 'CarlaUE4.sh'),
self.map,
"-benchmark", "-carla-server",
"-fps=10", "-world-port{}".format(self.port),
"-windowed -ResX={} -ResY ={}".format
(carla_config.server_width, carla_config.server_height),
"-carla-no-hud"]
p = subprocess.Popen(cmd, env=my_env) |
这个目前的缺点是默认第0块GPU,选择其他的会失效,在https://github.com/carla-simulator/carla/issues/225
有提到
如果你想能够选择gpu,可以选择下面的docker启动
1.2 docker启动
关于docker和nvidia docker的安装以及carla镜像的安装可以参考官网
在程序中
p = subprocess.Popen(['docker',
'run', '--rm', '-d', '-p',
str(self.port) + '-' + str(self.port + 2) + ':'
+
str(self.port) + '-' + str(self.port + 2),
'--runtime=nvidia', '-e', 'NVIDIA_VISIBLE_DEVICES='+str(self.gpu),
"carlasim/carla: 0.8.4",
'/bin/bash', 'CarlaUE4.sh', self.map, '-windowed',
'-benchmark', '-fps=10', '-world-port=' + str(self.port)],
shell=False, stdout=subprocess.PIPE) |
如果你的docker为19.03,nvidia-docker是新版,调用gpu的方式有些许不同
p = subprocess.Popen (['docker',
'run', '--rm', '-d', '-p',
str(self.port) + '-' + str(self.port + 2) + ':'
+
str(self.port) + '-' + str(self.port + 2),
'--gpus='+str(self.gpu), "carlasim/carla:0.8.4",
'/bin/bash', ' CarlaUE4.sh', self.map, '-windowed',
'-benchmark', '-fps=10', '-world-port=' + str(self.port)],
shell=False,
stdout= subprocess.PIPE) |
docker启动即是以无界面方式启动
2.Carla Client
在上一步解压后的目录下有一个PythonClient目录,里面包含有客户端连接的样例代码client_example
当以服务端模式启动Carla后,默认监听端口为2000
运行python client_example.py --autopilot可以连接上服务端控制汽车
参数autopilot表示启动内置的自动驾驶功能,若没有这个参数则会随机输出动作
在程序中,我们首先需要读取配置文件。如Example.CarlaSettings.ini文件
若没有给出配置文件位置,在程序中也可以设置配置。
settings = CarlaSettings()
settings.set(
SynchronousMode=True,
SendNonPlayerAgentsInfo=True,
NumberOfVehicles=20,
NumberOfPedestrians=40,
WeatherId=random.choice([1, 3, 7, 8, 14]),
QualityLevel=args.quality_level)
settings.randomize_seeds() |
除了基本设置外,我们还需要一个RGB Camera,作为我们以驾驶员视角看到的图像,成为我们训练算法中每一个step的状态输入量。
# The default
camera captures RGB images of the scene.
camera0 = Camera('CameraRGB')
# Set image resolution in pixels.
camera0.set_image_size (800, 600)
# Set its position relative to the car in meters.
camera0.set_position (0.30, 0, 1.30)
settings.add_sensor(camera0) |
接着我们可以通过加载设置得到一个场景,场景中包含有许多起始点可供选择(根据Town地图选择的不同而不同,0.8.2版本中有Town1和Town2)
# Now we load
these settings into the server. The server replies
# with a scene description containing the available
start spots for
# the player. Here we can provide a CarlaSettings
object or a
# CarlaSettings.ini file as string.
scene = client.load_settings (settings)
# Choose one player start at random.
number_of_player_starts = len(scene.player_start_spots)
player_start = random.randint (0, max(0, number_of_player_starts
- 1)) |
通过view_start_positions.py脚本我们可以场景中所有起点的编号和位置
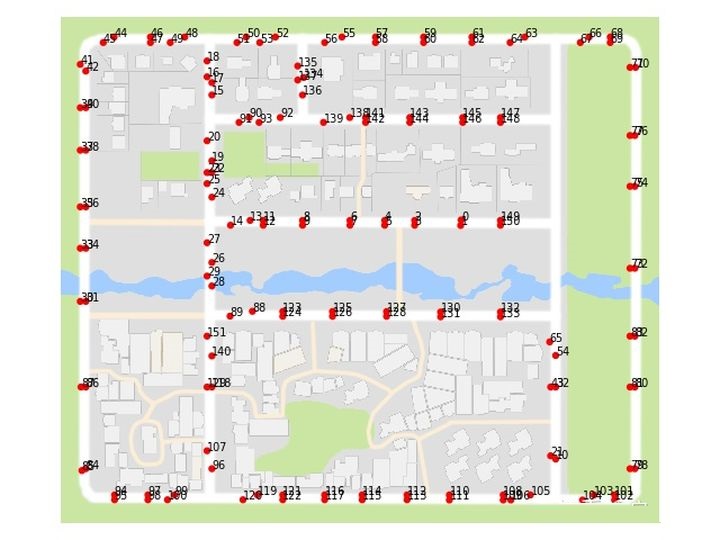
选择一个起点编号, 我们就可以开始这趟episode
# Notify the
server that we want to start the episode at the
# player_start index. This function blocks until
the server is ready
# to start the episode.print ('Starting new episode...')
client.start_episode (player_start) |
接下来是这一趟的交互过程
for frame in
range (0, frames_per_episode):
measurements, sensor_data = client.read_data()
print_measurements (measurements)
# Save the images to disk if requested.
if args.save_images_to_disk:
for name, measurement in sensor_data.items():
filename = args.out_filename_format.format (episode,
name, frame) measurement.save_to_disk (filename) |
在每一帧中,我们首先读取状态数据,measurements包含有汽车的各种测量数据,有车辆的xy坐标,速度,碰撞数据(碰撞强度,单位kg*m/s,包括碰撞车辆,行人,其他物体三种),跑出道比例
player_measurements
= measurements.player_measurements
pos_x= player_measurements.transform.location.x,
pos_y= player_measurements.transform.location.y,
speed= player_measurements.forward_speed * 3.6,
# m/s -> km/h
col_cars= player_measurements.collision_vehicles,
col_ped= player_measurements.collision_pedestrians,
col_other= player_measurements.collision_other,
other_lane=100 * player_measurements .intersection
_otherlane,#占其他车道百分比
offroad=100 * player_measurements.intersection
_offroad,#跑出道路外百分比 |
sensor_data是一个字典,为各种定义的传感器,比如之前建立的RGB
Camera,里面包含有图像的矩阵数据,取出方法如下
| rgb_image
= sensor_data['CameraRGB'].data |
在读取过状态数据后,我们需要对车辆发送控制指令,Carla支持的控制指令如下
| 指令 | 类型,范围 | 描述 |
| Steer | Float, [-1.0,1.0] | 方向盘角度 |
| Throttle | Float, [0.0,1.0] | 油门 |
| Brake | Float, [0.0,1.0] | 刹车 |
| Hand Brake | Bool, True/False | 是否启动手刹 |
| Reverse | Bool,True/False | 是否要倒挡 |
3.Driving Benchmark
在CoRL2017这篇文章里,给出了一个实验benchmark,我们可以在benchmark上跑自己的实验,也可以定制自己的benchmark
论文中定义了四种任务,其实都属于导航任务,即给定不一样的起点和终点
直行:起点和终点处于一道直线上,无动态物体,在Town1中平均距离为200m,在Town2中平均距离为100m
一次转弯:终点距离起点需要一个转弯,无动态物体,在Town1平均距离为400m,在Town2平均距离为170m
导航:起点和终点无特殊限制,无动态物体,Town1平均距离为770m,Town2平均距离为360m.
具有动态障碍物的导航:与之前任务一致,但是具有动态物体(车辆或行人)
在driving_benchmark/ experiment_suites/corl_2017.py给出了详细配置
我们学着写出自己的实验配置,程序中则是继承ExperimentSuite类:
确定起点和终点:
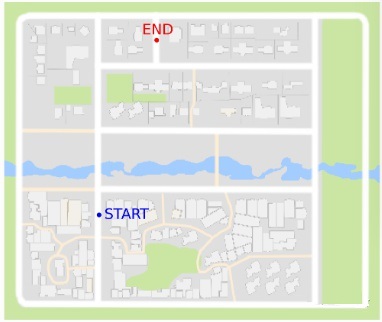
例如我们可以选择起点为140,终点为134,在view_start_position.py脚本中可以可视化其具体位置。
| python view_start_positions.py
--pos 140,134 --no-labels |
类似的我们可以定义四个任务
# Define the
start/end position below as tasks
poses_task0 = [[7, 3]]
poses_task1 = [[138, 17]]
poses_task2 = [[140, 134]]
poses_task3 = [[140, 134]]
# Concatenate all the tasks
poses_tasks = [poses_task0, poses_task1 , poses_task1
, poses_task3] |
确定车辆数目和行人数目
# Add dynamic
objects to tasks
vehicles_tasks = [0, 0, 0, 20]
pedestrians_tasks = [0, 0, 0, 50] |
配置实验类
experiments_vector
= []
# The used weathers is the union between test
and train weathers
for weather in used_weathers:
for iteration in range(len(poses_tasks)):
poses = poses_tasks[iteration]
vehicles = vehicles_tasks[iteration]
pedestrians = pedestrians_tasks[iteration]
conditions = CarlaSettings()
conditions.set(
SendNonPlayerAgentsInfo=True,
NumberOfVehicles=vehicles,
NumberOfPedestrians=pedestrians,
WeatherId=weather
)
# Add all the cameras that were set for this
experiments
conditions.add_sensor(camera)
experiment = Experiment()
experiment.set(
Conditions=conditions,
Poses=poses,
Task=iteration,
Repetitions=1
)
experiments_vector.append(experiment) |
除了之前的设置外,我们还可以配置评价标准,默认设置如下:
| return {
'intersection_offroad': {'frames_skip': 10,
'frames_recount': 20,
'threshold': 0.3
},
'intersection_otherlane': {'frames_skip': 10,
'frames_recount': 20,
'threshold': 0.4
},
'collision_other': {'frames_skip': 10,
'frames_recount': 20,
'threshold': 400
},
'collision_vehicles': {'frames_skip': 10,
'frames_recount': 30,
'threshold': 400
},
'collision_pedestrians': {'frames_skip': 5,
'frames_recount': 100,
'threshold': 300
},
} |
里面的frame_skip表示了计算违规操作时(碰撞,越道)跳过的帧数,当两帧违规量之差大于threshold这个定义的限制时,则记为一次违规操作,frame_recount则定义了跳过多少帧后再次重新计算违规操作,一般这些保持默认值即可。
这些配置都可以在basic_experiment_suite类查看
除了实验配置外,我们还要定义自己的智能体,这里我们定义一个只前进的智能体,即油门量设置为0.9。
class ForwardAgent(Agent):
"""
Simple derivation of Agent Class,
A trivial agent agent that goes straight
"""
def run_step (self, measurements, sensor_data,
directions, target):
control = VehicleControl()
control.throttle = 0.9
return control |
定义好实验设置和智能体后,启动Carla服务器,直接调用driving_benchmark.py中的run_driving_benchmark函数就可以运行benchmark了。
详细代码可以参考benchmark_example.py
运行benchmark_example后,我们会发现在当前目录下生成一个实验结果的文件夹,里面大概包含这四个文件
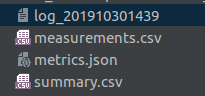
第一个log文件记录了实验的进行过程,大概类似这样的结果
Start Task
0
Start Poses (7 3 ) on weather 1
Start Task 1
Start Poses (138 17 ) on weather 1
Start Task 2
Start Poses (140 134 ) on weather 1
Start Task 3
Start Poses (140 134 ) on weather 1
====== Finished Entire Benchmark ======
|
第二个文件measurements.csv记录了每个实验任务每一帧汽车所处的xy位置,以及当时的控制量
第四个文件summary.csv记录了每个实验任务的结果
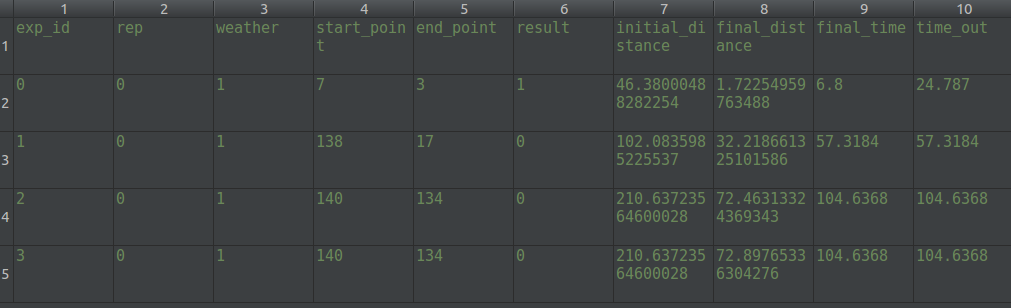
result=1代表本次任务成功到底终点,每次实验开始会计算起点与终点的距离(欧式距离),实验结束也会计算一次目前距离终点的距离。
程序中内置了一个planner规划器,在给定起点和终点后会以A star算法规划一条路径,目的是为了给训练时提供一个高级指令信号(左转,右转,直行),同时也会计算一个超时时间,超过这个时间则算作失败。
第三个文件metric.json文件有计算出的’episodes_completion’,
‘intersection_offroad’, ‘intersection_otherlane’, ‘collision_pedestrians’, ‘collision_vehicles’, ‘collision_other’,‘episodes_fully_completed’, ‘average_speed’, ‘driven_kilometers’各种指标值。
最终print出训练和测试中各种指标值,类似result
|