| 编辑推荐: |
本文主要介绍了机器人软件架构介绍—具身智能研发基础相关内容!希望对你的学习有帮助。
本文来自于去哪儿拿offer,由火龙果软件Alice编辑,推荐。 |
|
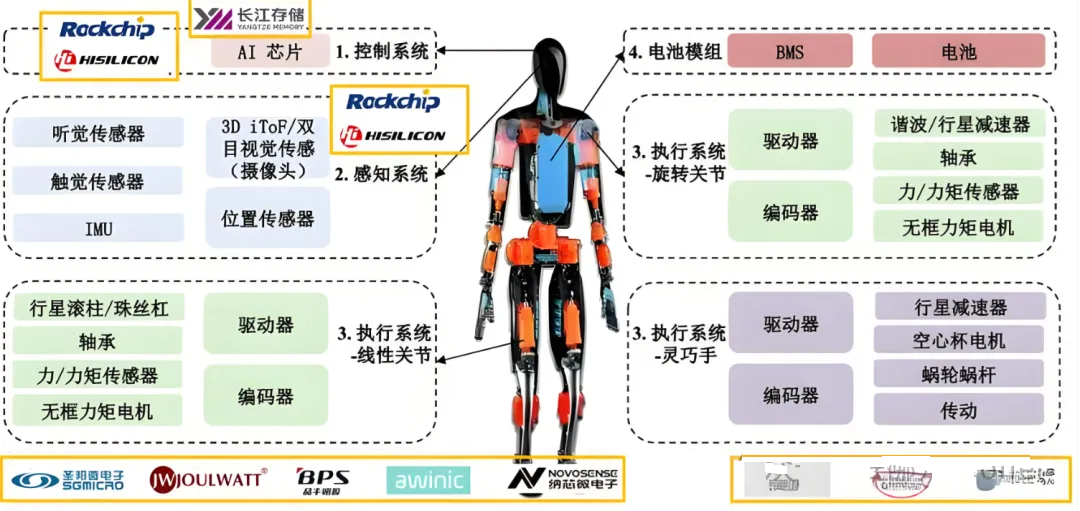
机器人软件架构是机器人系统的神经中枢与运行骨架,是决定机器人功能上限、控制精度、智能化水平与安全可靠性的核心,被称为机器人的“数字灵魂”。
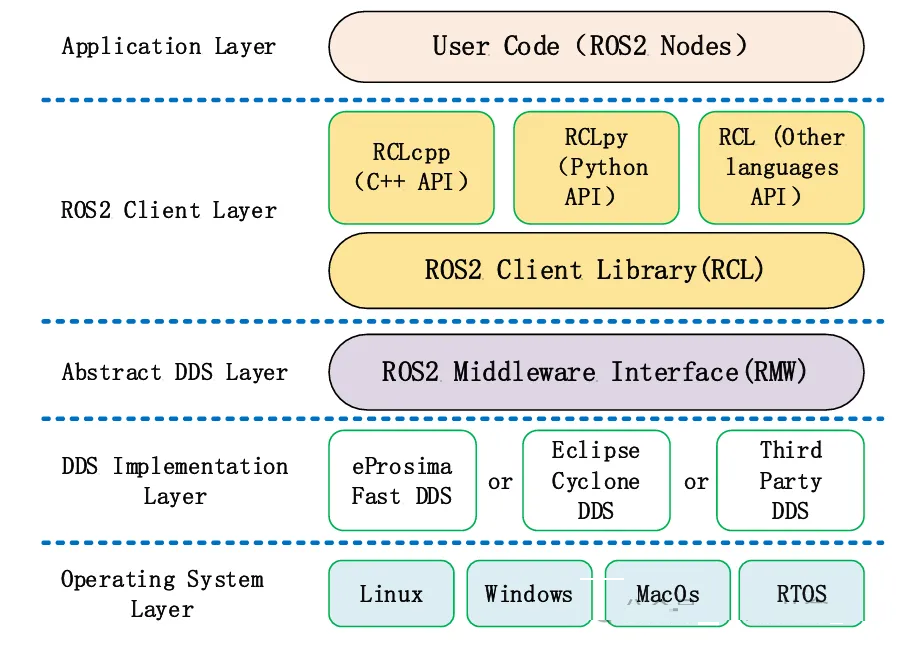
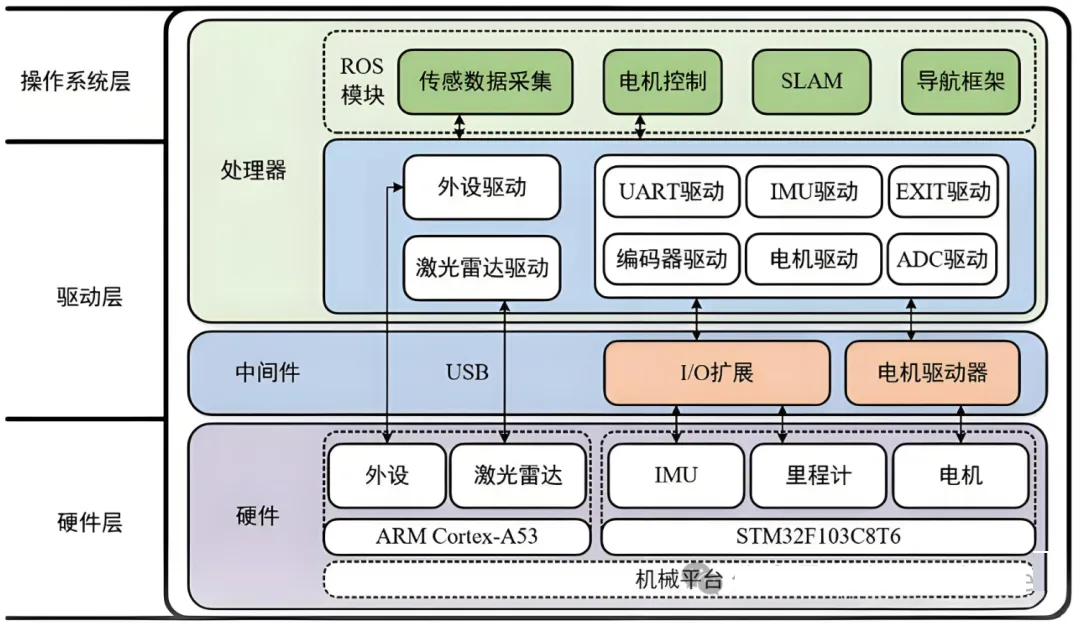
行业主流采用两大技术路线:一是基于ROS/ROS2的分布式模块化软件架构,二是自研全栈硬实时一体化架构。两类路线均按功能属性与实时性要求划分为标准5层架构,从底层到顶层依次为:硬件抽象层HAL→驱动执行层→实时控制层→决策规划层→应用层,实现了层级间接口标准化、算力合理分配、功能解耦与高效协同。
一、核心分层架构
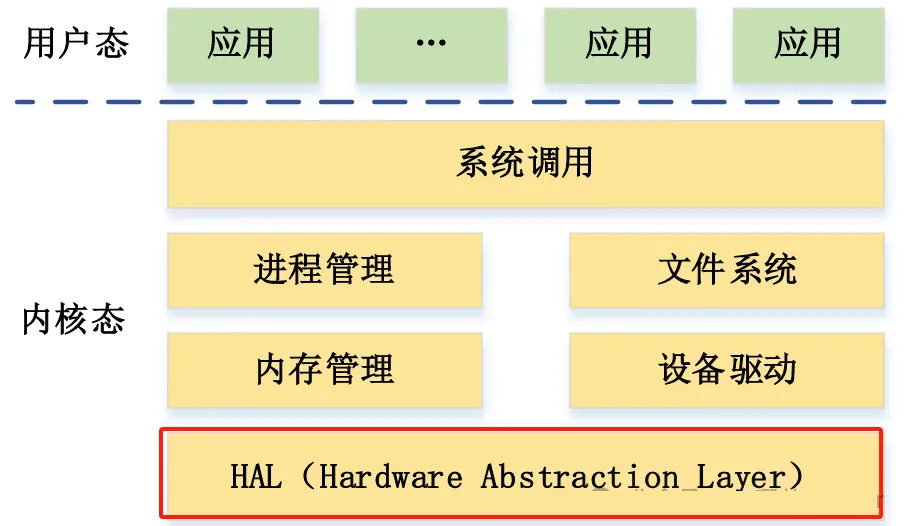
1. 硬件抽象层(HAL)- 底层适配层
软件与硬件之间的“翻译官”与“隔离带”,是整个软件栈的基石,核心目标是彻底屏蔽异构硬件的底层差异,为上层软件提供统一、无差别的硬件访问接口,从根源上解决软件跨硬件平台的移植难题。
核心功能模块:
统一设备驱动框架:标准化的驱动注册、加载、卸载与热插拔机制,兼容各类外设
底层接口抽象:对GPIO、ADC、PWM、SPI、I2C等片上外设,以及CAN/EtherCAT/Profinet等工业总线进行统一封装,隐藏寄存器级操作细节
设备驱动:
设备状态管理:硬件上电自检、故障分级上报、状态实时同步、异常复位与降级处理
上层控制算法与业务逻辑无需任何修改,即可适配不同品牌的电机、传感器、控制器,一套软件可兼容六轴工业机器人、协作机器人、移动机器人等多类机型,大幅降低跨平台开发与迭代成本。
2. 驱动执行层 - 超高速硬实时层级
机器人的“肌肉执行终端”,是运动控制指令的最终执行环节,直接决定电机的响应速度、控制精度、运行平稳性与安全性,是整个系统硬实时保障的最核心环节。
实时性要求:超高速硬实时,电流环控制周期1050kHz(20100μs),速度环/位置环控制周期1~10kHz,控制抖动<1μs,绝对禁止非实时任务抢占,否则会出现电机失步、抖动、失控等致命问题
运行载体:专用关节伺服驱动器、内置MCU/DSC/FPGA的执行器终端,独立于主控制器运行,不依赖上层系统资源
核心功能模块:
三环闭环控制:
- 功率转换与驱动:IGBT/MOSFET栅极驱动、PWM调制、功率放大,将弱电控制信号转换为强电动力,驱动电机运转
- 硬件级安全保护(纳秒级响应):过流、过压、欠压、过温、堵转、短路保护,直接硬件触发应急停机,无需上层软件干预,是机器人安全的最后一道防线
- 实时状态反馈:与控制周期同步,向上层实时上报电机位置、转速、电流、温度、力矩等全量状态数据
- 非线性前馈补偿:摩擦力补偿、惯量补偿、齿槽效应补偿,大幅提升电机低速运行平稳性与定位精度
主流技术方案:
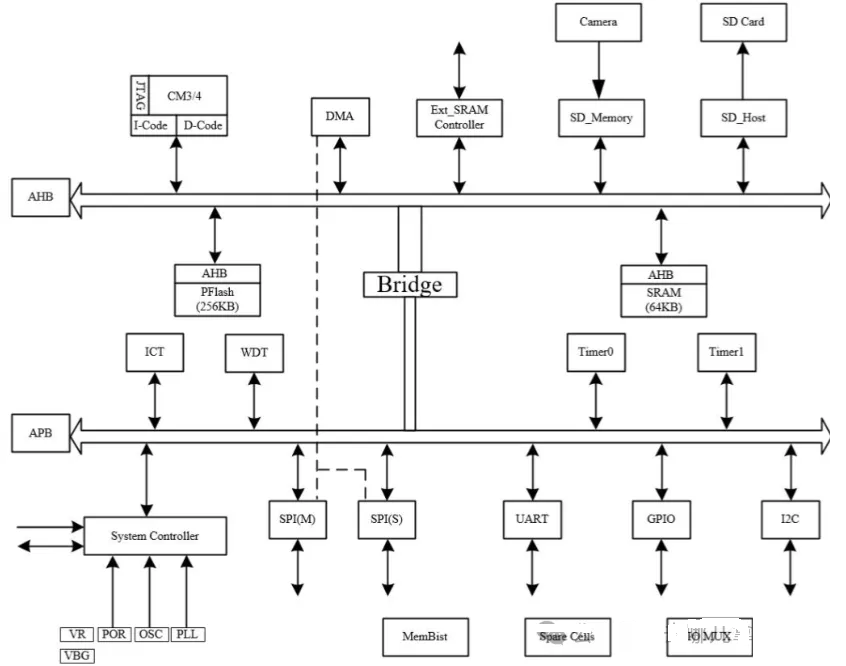
- 硬件芯片:TI C2000系列DSP、STM32 G4/H7系列MCU、Xilinx Artix-7
FPGA
- 控制算法:有感/无感FOC、滑膜观测器(SMO)、自适应PID控制
- 商业成品:松下A6系列伺服、汇川IS620N系列、Elmo Gold系列驱动器、台达ASDA系列
3. 实时控制层 - 硬实时层级
机器人的“小脑”,是运动控制的核心中枢,承接上层决策规划层的轨迹指令,转化为每个关节可执行的精准控制信号,直接决定机器人的多轴协同能力、运动平稳性、柔顺交互能力与动态响应性能。
实时性要求:硬实时,控制周期110kHz(1001000μs),控制抖动<5μs,必须运行在专用硬实时操作系统上,严格隔离非实时任务,禁止通用计算任务占用CPU资源
运行载体:主控制器中的实时核心(ARM Cortex-R系列MCU、FPGA、专用运动控制芯片)、独立运动控制卡,搭载专用硬实时RTOS
核心功能模块:
多轴协同插补控制:支持直线插补、圆弧插补、NURBS样条插补,实现六轴/七轴/冗余自由度机器人的精准联动控制,保障末端执行器的轨迹精度
全维度动力学控制:
实时轨迹跟踪与修正:接收上层的轨迹指令,完成实时微插值,根据传感器反馈动态修正轨迹,应对负载变化、外部扰动等突发情况
全链路安全闭环控制:
高速实时数据交互:与驱动执行层通过EtherCAT/CAN总线实现μs级同步收发,与决策规划层通过共享内存/高速总线完成低延迟数据交互
主流技术方案:
- 硬实时操作系统:FreeRTOS、RT-Thread、QNX、VxWorks、Xenomai(Linux硬实时补丁)
- 运动控制框架:倍福TwinCAT 3、固高GTS运动控制卡、翠欧Motion Perfect、ROS2
Control
- 动力学算法库:RBDL、Pinocchio、KDL、Robotics Toolbox
4. 决策规划层 - 软实时层级
机器人的“大脑中枢”,是机器人智能化的核心载体,负责环境感知、任务理解、全局规划,将上层的业务任务指令,转化为实时控制层可执行的运动轨迹,实现机器人从“预编程执行”到“自主决策作业”的升级。
核心功能模块:
- 多模态环境感知与建模:
- 全局任务规划与行为决策:
- 运动学计算与轨迹生成:
- 碰撞检测与动态避障:
主流技术方案: -
核心框架:ROS/ROS2、MoveIt!(机械臂规划)、Navigation2(移动机器人导航)
- 算法库:OpenCV(视觉处理)、PCL(点云处理)、OMPL(运动规划库)、CasADi(优化求解)
- 边缘计算平台:NVIDIA Jetson Orin、Intel NUC、瑞芯微RK3588
5. 应用层 - 非实时层级
机器人与用户、外部系统的“交互窗口”,是用户操作、管理、二次开发机器人的直接入口,核心目标是降低机器人使用门槛,实现机器人的可配置、可运维、可扩展与产线集成。
实时性要求:非实时,无严格的周期控制要求,优先保障交互流畅性、功能丰富性与操作便捷性,允许正常交互延迟
运行载体:示教器、上位机PC、工控机、平板/手机终端,运行于Linux/Windows/Android系统
核心功能模块: -
多模态人机交互系统:
- 编程与二次开发系统:
- 任务管理与协同调度系统:
- 状态监控与故障诊断系统:
系统管理功能:系统参数配置、用户分级权限管理、固件升级/OTA、数据备份与恢复
二、两大主流架构路线对比
| 对比维度 |
基于ROS/ROS2的分布式模块化架构 |
自研全栈硬实时一体化架构 |
| 核心优势 |
生态完善、开源组件丰富、开发门槛低、迭代速度快、可扩展性强,支持快速二次开发与场景适配 |
全链路硬实时保障、控制精度高、安全性强、代码冗余度低、算力利用率高,可实现大小脑深度融合 |
| 实时性表现 |
依赖硬实时补丁,软实时能力优秀,硬实时能力有上限,抖动控制难度大 |
原生硬实时设计,全周期时序可控,抖动可控制在μs级,硬实时保障能力拉满 |
| 开发成本 |
开发周期短、人力成本低,无需从零搭建全栈框架 |
开发周期长、技术门槛高、人力成本高,需要全栈技术团队长期迭代 |
| 安全合规性 |
组件来源分散,功能安全与信息安全合规难度大,难通过工业级安全认证 |
全栈自研,代码可控,可实现全链路安全闭环,易通过ISO 13849、IEC 61508等安全认证 |
| 适用场景 |
科研教学、通用商用机器人、协作机器人、服务机器人、非关键工业场景 |
高端工业机器人、精密制造场景、人形机器人、高安全要求的工业产线、特种作业机器人 |
| 代表厂商/产品 |
大部分协作机器人厂商、移动机器人厂商、开源机器人项目、科研机构 |
ABB、KUKA、FANUC、安川、特斯拉Optimus、逐际动力、宇树科技 |
三、不同机器人类型的架构适配重点
工业机械臂:核心聚焦驱动执行层+实时控制层,极致追求控制精度、响应速度、多轴联动稳定性,对决策规划层的要求以固定轨迹规划为主,智能化需求较低
移动机器人(AGV/AMR):核心聚焦决策规划层,重点强化SLAM建图、全局路径规划、动态避障能力,对实时控制层的要求以轮式驱动控制为主,复杂度较低
协作机器人:均衡覆盖5层架构,重点强化实时控制层的柔顺控制能力与应用层的低代码编程能力,兼顾控制精度与人机交互安全性
人形机器人:全栈架构极致优化,核心突破实时控制层的全身动力学控制与决策规划层的具身智能能力,要求硬实时与智能化深度融合,是机器人软件架构的最高难度形态
四、机器人软件架构的演进趋势
大小脑融合一体化架构:打破传统分层的算力隔离,实现认知决策“大脑”与运动控制“小脑”的芯片级融合,端到端延迟从百ms级降至1ms内,大幅提升机器人动态响应能力
端侧大模型赋能的具身智能架构:将VLA(视觉-语言-动作)大模型嵌入决策规划层,实现自然语言指令到动作序列的端到端生成,赋予机器人通用场景的自主作业能力
云边端协同架构:端侧负责实时控制与紧急决策,边缘侧负责场景化感知与规划,云端负责大模型训练、数据闭环、多机协同调度与OTA升级,实现规模化机器人集群的统一管理
软硬协同全栈优化架构:针对机器人场景定制专用芯片与指令集,软件架构与硬件深度耦合,大幅提升算力利用率,降低功耗,适配人形机器人等端侧高算力、低功耗需求场景
功能安全与信息安全双融合架构:从底层到顶层实现全链路安全设计,将功能安全(防失控、防伤人)与信息安全(防入侵、防数据泄露)深度嵌入架构设计,适配工业互联网与人机共融场景的安全要求 | 






 订阅
订阅