| 编辑推荐: |
文章主要介绍了
嵌入式 RTOS 的邮箱相关内容:邮箱到底是什么?内核里它长什么样?一次 send
和一次 recv 在底层走了哪些路?以及——什么场景下你应该选邮箱而不是消息队列。希望对你的学习有帮助。
本文来自于一枚嵌入式码农,由火龙果软件Alice编辑、推荐。
|
|
写嵌入式的人迟早会碰到这么个问题:两个任务在同一颗 MCU 上跑,它们之间怎么交换数据?
最先想到的当然是全局变量。一个任务写,一个任务读,看起来再朴素不过。但只要写到一半被调度器切走,另一个任务读到的就是"半生不熟"的数据。加锁?锁加在哪一层、粒度多大、会不会和别的锁互相等——这些都得想清楚。再说,光有数据访问的保护还不够,接收方还得知道"什么时候有新数据可读",否则就只能轮询,CPU
在那里空转。
所以 RTOS 内核都会专门提供一组任务间通信(IPC)的原语:信号量、互斥锁、消息队列、事件标志组……还有一个不太常被单独拎出来讲的——邮箱(Mailbox)。
很多教材一笔带过,或者把它当成消息队列的退化版本,没什么存在感。但实际项目里,邮箱用得相当频繁,尤其在
RAM 紧张的小 MCU 上。今天这篇文章就把它单独拎出来,从内核数据结构、发送和接收的完整流程、一直到工程上的典型用法,掰开揉碎讲清楚。
读完应该能回答这几个问题:邮箱到底是什么?内核里它长什么样?一次 send 和一次 recv 在底层走了哪些路?以及——什么场景下你应该选邮箱而不是消息队列。
一、邮箱到底是什么:被低估的容器
老实讲,"邮箱"这个名字起得挺形象。
你写一封信塞进邮筒,邮递员把它送到收件人那里。你不用关心收件人现在在不在家、什么时候来取信。整个过程是异步的,发件人和收件人在时间上彻底解耦。
RTOS 里的邮箱就是这么个东西,只不过它的容量通常只够装一封信。
简单粗暴的定义:邮箱是一种容量为 1 的消息容器。它内部就放一份数据——可能是一个指针,也可能是一个固定大小的值。发送任务往里塞,接收任务从里取。
你可能会问,那它和消息队列差在哪?看这张对比图:
四种机制各管一摊。信号量只能告诉你"发生了",没法把"发生的是什么"带过来;消息队列能带数据,但代价是一块连续的环形缓冲;邮箱卡在中间——只有一份数据,但这一份能携带任意类型的信息。
为什么要单独搞一个邮箱?因为在嵌入式场景里,绝大多数任务间通信的实际内容,就是"一份"东西:一个最新的传感器读数、一个状态标识、一个事件参数、一个待执行的命令。前一份还没被消费就来了新的,通常你也只关心最新那个——旧的就该被覆盖掉。
这个语义用消息队列实现也行,但你要么人为限制队列深度为 1,要么自己处理"满了怎么办"。邮箱把这个语义直接做成原语,省掉了一层心智负担,也省下了那点宝贵的
RAM。
在 Cortex-M0/M3 这类几十 KB RAM 的芯片上,每个机制省下来的几十字节都不是小数。这就是邮箱存在的工程理由。
二、拆开内核:邮箱长什么样
光说概念不过瘾,直接看内核里它的样子。
不同 RTOS(μC/OS、FreeRTOS、RT-Thread、Zephyr)的实现细节略有差异,但骨架几乎一样。一个邮箱在内核里就是一个**控制块(Control
Block)**结构体,外加可能挂着的若干等待中的任务。
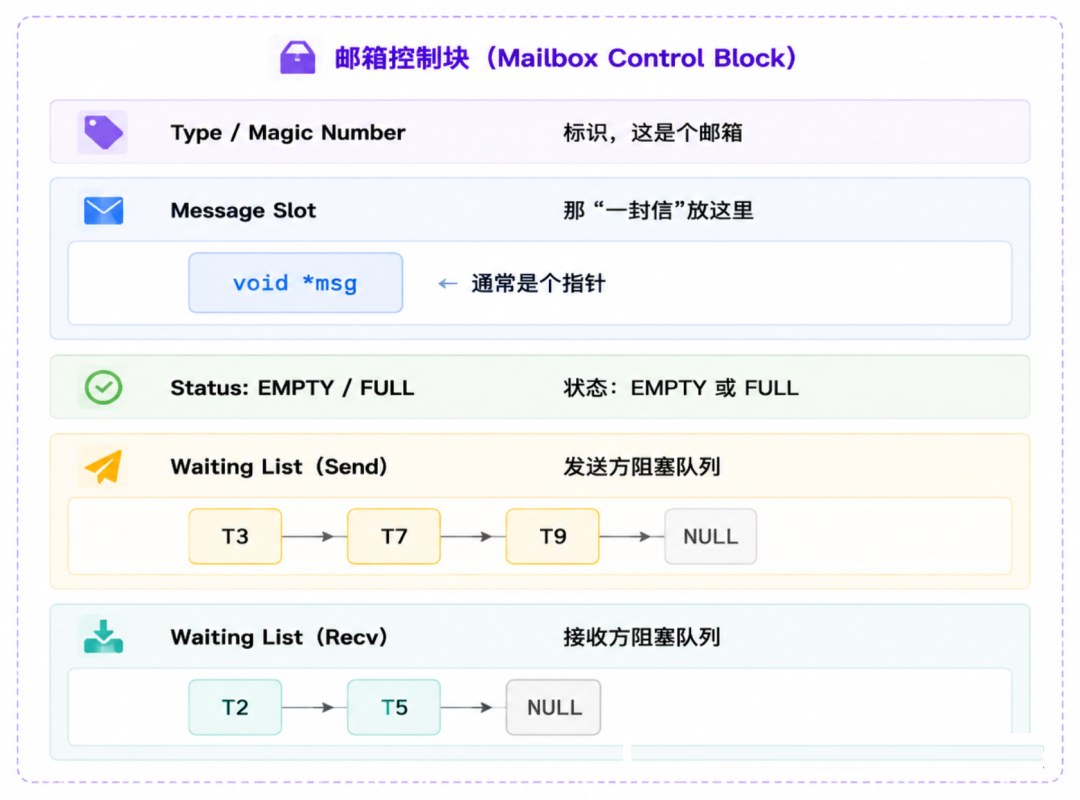
几个字段一个个说。
Type 字段通常是个魔数(比如 0x4D42 对应 "MB"),调试时用来快速判断一个指针指向的对象到底是不是邮箱,防止类型混用。某些内核还会用它做断言检查——传一个信号量句柄给邮箱接口,立马
ASSERT 失败。
Message Slot 那一槽是邮箱的"邮筒"本体。绝大部分实现里它就是一个
void *——也就是说,邮箱默认传递指针,而不是把数据本身拷进去。这点很关键,后面讲应用场景时还会提到。指针的好处是无论数据多大,都只占
4 字节(32 位系统);坏处是数据本身的生命周期得你自己管,发送方不能随手把栈上变量的地址塞进去,因为函数一返回那块内存就废了。
Status 字段只有两种状态:空(EMPTY)和满(FULL)。这个简单的状态机是发送方/接收方阻塞与否的判断依据。
两条等待链表是邮箱机制能做"阻塞等待"的关键所在。
• 发送方等待链表:当邮箱已满,发送任务又指定了"阻塞等待",它就被挂到这条链上,进入挂起状态。
• 接收方等待链表:邮箱为空时,接收任务被挂到这条链上等。
链表节点通常不是单独 malloc 出来的,而是直接复用任务控制块(TCB)里预留的 wait_list_node
字段——也就是说,等待挂载是零额外内存开销的。这是 RTOS 设计上一个很优雅的细节。
链表的排序方式也有讲究。简单实现按 FIFO 排,先来先服务;做得讲究一点的内核会按任务优先级排,高优先级任务排在前面,保证一旦邮箱可用,最该跑的任务先被唤醒。这种排序是优先级抢占式
RTOS 的"基本素养"。
总结一下,邮箱控制块虽小,但承担了三件事:存数据、存状态、组织等待者。后面所有操作都围绕这三样展开。
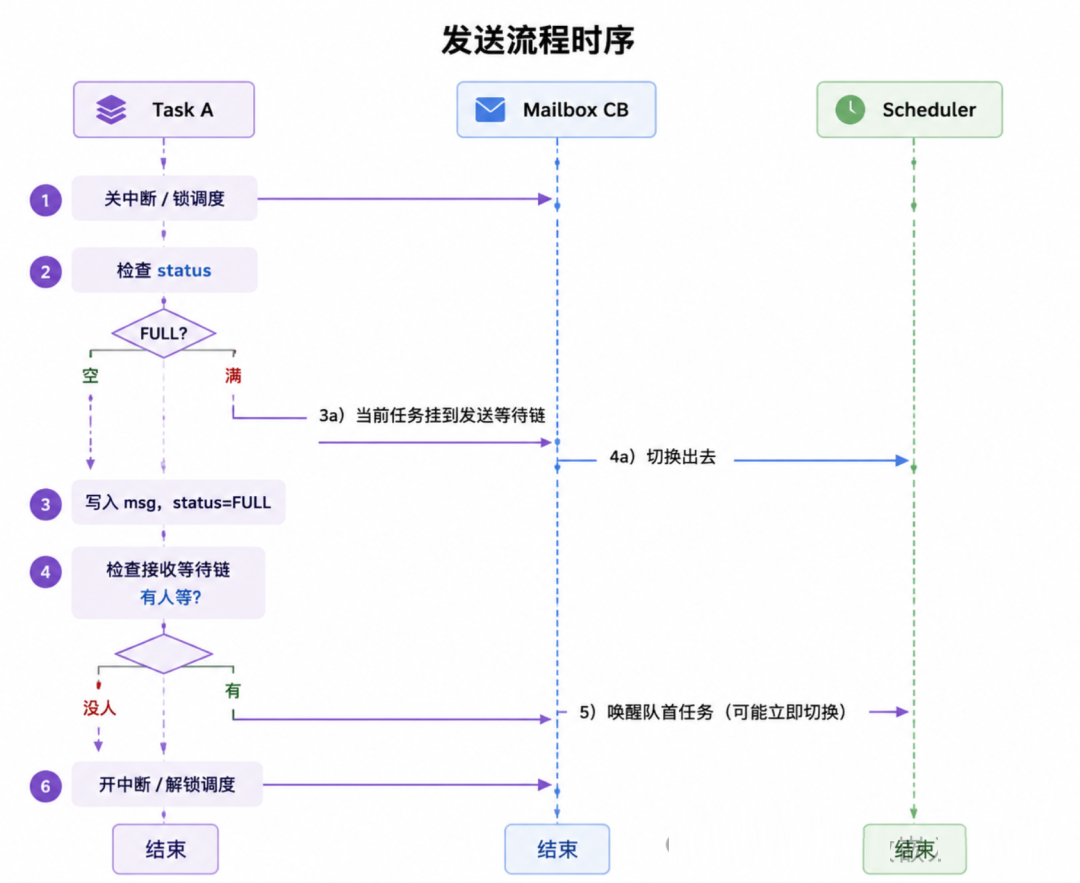
三、发一封"信":send 在内核里的完整走法
伪代码先放一边,先把人话讲清楚。一个任务调用 mailbox_send(mb, msg, timeout)
之后,内核大致会经历这么几步:
第一步:进入临界区。这是必须的,因为接下来要读写共享状态(status、message slot、等待链表),这些是多个任务都能碰到的"全局变量"。具体做法在不同
RTOS 里有差别——有的直接关中断(__disable_irq),有的锁住调度器(vTaskSuspendAll),有的用细粒度自旋锁(多核系统)。单核
RTOS 上最常见的就是关中断,几条汇编下来开销很小。
第二步:判断状态。邮箱满了(已经有一封信在里面),就要按 timeout 参数决定下一步:
• timeout == 0(不等待):直接返回 "full" 错误码,临界区里走一遭就出来了。
• timeout == INFINITE(永久等待):把当前任务从就绪链表摘下来,挂到邮箱的发送等待链表上,状态改成
BLOCKED。
• timeout > 0(有限等待):除了挂等待链表,还要往任务的定时器链表上挂一个定时器,到点了内核会主动来"踹醒"它。
挂上去之后,当前任务就不能继续运行了——它已经不在就绪队列里,调度器接管,从剩下的就绪任务里挑一个最高优先级的去跑。这一步是真正的"阻塞"语义——任务在系统层面被冻结,CPU
资源完全让出来,不占片刻空转。
第三步:写入数据。如果邮箱是空的,就把 msg(通常是个指针)拷到那个槽位里,状态置为 FULL。这步只是普通的赋值,几条指令就完事。
第四步:检查接收方等待链。这步常被新手忽略,但它是邮箱机制能"立即通知"的灵魂所在。
想象一下:接收任务先调用了 mailbox_recv,发现邮箱是空的,就老老实实挂到了接收等待链表上。现在发送方写完数据,要做的事情是——把这个等待者捞出来,让它继续跑。
具体动作:从接收等待链表头部取一个任务(通常是最高优先级或者最早等的那个),把数据从邮箱搬到这个任务的"接收缓冲指针"里(接收任务调用
recv 时已经把自己接收缓冲的地址记在 TCB 上了),把这个任务的状态从 BLOCKED 改回
READY,挂回就绪队列。
第五步:可能的立即切换。如果刚唤醒的这个接收任务优先级比当前发送任务还高,调度器会立刻切过去——发送任务的
send 调用还没返回,CPU 控制权就先交给了接收任务。这种"发送方调一下 send,接收方立马就跑起来"的体验,就是来自这一步。
第六步:退出临界区。开中断或者解锁调度器,发送任务(如果还在跑)继续往下走。
整个流程里,临界区只覆盖到判断和指针操作那几行,并不锁住整个任务切换过程。RTOS 内核在这种"快进快出"上花了很多心思,因为关中断时间长了,外设的中断响应延迟就会被拖大。
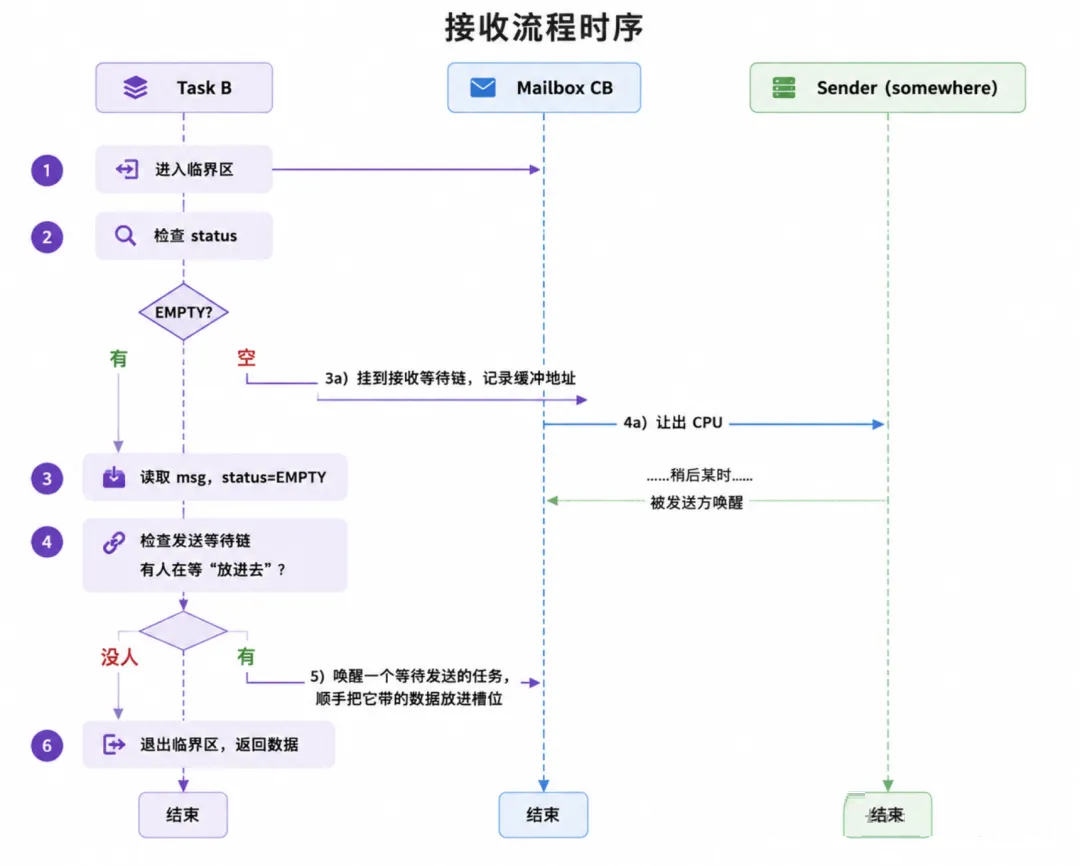
四、取一封"信":recv 是 send 的镜像
接收流程和发送几乎对称,思路上没有新东西,但有几个细节值得点一下。
第 4b 那步特别有意思,是接收流程独有的"对偶逻辑"。
试想一种情况:发送方原本因为邮箱满而被阻塞,现在接收方刚把这一份数据取走,邮箱腾出了空位——自然就该让一个等待中的发送方把它的信塞进来。所以接收流程里不仅要看自己的事,还要把这个空位顺水推舟地填掉。一个
recv 调用,内部其实做了两件事:取出当前的、再唤醒一个发送方放进下一封。这是邮箱机制在多任务高并发场景下保持流畅的关键。
接收方还多了一个等待超时的语义。比如串口任务最多等 100ms,没数据就认为通信故障,进入重试逻辑。内核在你挂到等待链表的同时,往软件定时器链上也挂了一个节点。如果
100ms 内有数据进来,定时器节点会被先取消;如果到点了还没数据,定时器中断里把你从等待链摘下来,状态置成
READY,但返回值标记为 TIMEOUT——任务被唤醒之后能区分是真有数据来了,还是超时了。
中断里也能调用邮箱接口,但只能调"不等待"的那种——也就是 timeout =
0 的版本。中断处理函数本身没有任务上下文,不能被挂起,所以邮箱满就直接返回失败,剩下的怎么处理是你的事。很多
RTOS 会专门提供 mailbox_send_isr 这样的接口区分上下文,避免你一时手滑在中断里写了阻塞调用。
五、动手写一个:极简邮箱实现
把上面的流程翻译成代码,整体结构其实不复杂。下面这份是去掉了所有花活之后的最小骨架,重点是让你看清"逻辑层"在做什么。真实内核(FreeRTOS、RT-Thread)的实现要复杂得多,要考虑
SMP、tickless、堆栈检查这些工程因素,但核心思路一脉相承。
先定义数据结构:
/* 任务控制块里需要的字段(简化) */
typedef struct tcb {
list_node_t ready_node; /* 挂在就绪链表上 */
list_node_t wait_node; /* 挂在某个 IPC 对象的等待链表上 */
uint8_t priority;
uint8_t state; /* READY / BLOCKED / ... */
void *recv_buf; /* 接收时记下来要把数据写到哪里 */
int wait_result; /* 唤醒时的结果:OK / TIMEOUT */
timer_t wait_timer; /* 超时唤醒用 */
} tcb_t;
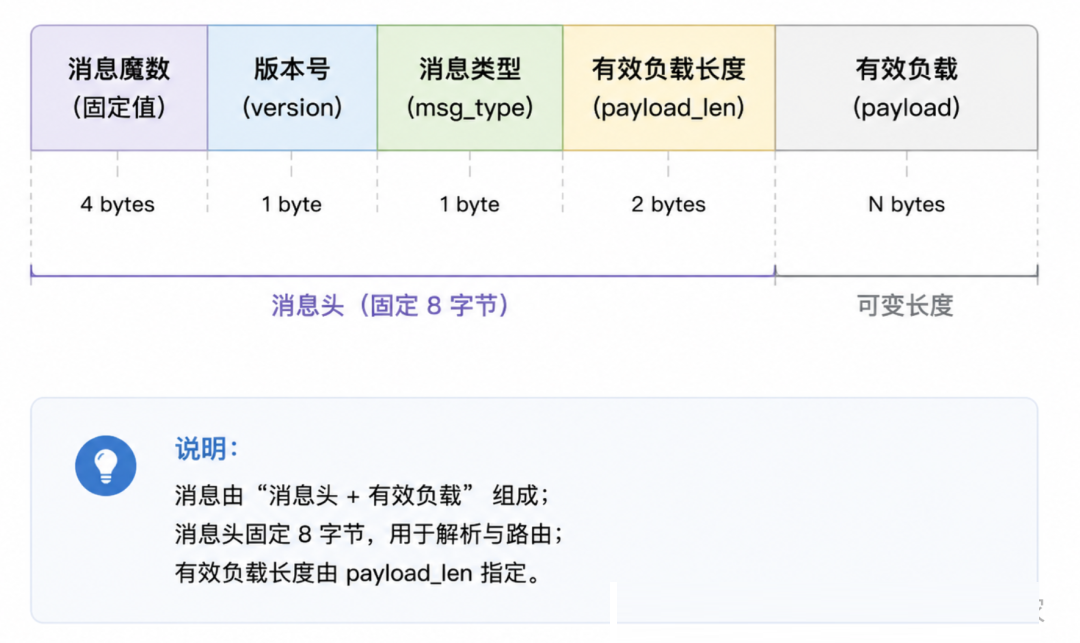
/* 邮箱控制块 */
typedef struct mailbox {
uint32_t magic; /* 类型识别 */
void *msg; /* 唯一的消息槽 */
uint8_t status; /* MB_EMPTY / MB_FULL */
list_t send_wait_list; /* 发送方阻塞队列 */
list_t recv_wait_list; /* 接收方阻塞队列 */
} mailbox_t;
|
发送接口:
int mailbox_send(mailbox_t *mb, void *msg, uint32_t timeout)
{
uint32_t lock = port_irq_lock(); /* 关中断 */
tcb_t *self = current_task();
/* 1) 邮箱已满 —— 看是否等 */
if (mb->status == MB_FULL) {
if (timeout == 0) {
port_irq_unlock(lock);
return MB_ERR_FULL;
}
/* 挂到发送等待链,按优先级排序插入 */
self->wait_result = MB_OK;
self->recv_buf = msg; /* 借这个字段记下要发什么 */
list_insert_by_prio(&mb->send_wait_list, &self->wait_node);
task_block(self, timeout); /* 让出 CPU,可能带定时器 */
port_irq_unlock(lock);
/* —— 被唤醒后从这里继续 —— */
return self->wait_result; /* OK 或 TIMEOUT */
}
/* 2) 邮箱是空的,先看有没有接收方在等 */
if (!list_empty(&mb->recv_wait_list)) {
tcb_t *waiter = list_pop_front(&mb->recv_wait_list);
*(void **)waiter->recv_buf = msg; /* 直接把数据丢到对方缓冲 */
waiter->wait_result = MB_OK;
task_unblock(waiter); /* 唤醒,可能立即切换 */
port_irq_unlock(lock);
return MB_OK;
}
/* 3) 没人等,就老老实实塞进槽位 */
mb->msg = msg;
mb->status = MB_FULL;
port_irq_unlock(lock);
return MB_OK;
}
|
接收接口结构对称:
int mailbox_recv(mailbox_t *mb, void **msg, uint32_t timeout)
{
uint32_t lock = port_irq_lock();
tcb_t *self = current_task();
if (mb->status == MB_EMPTY) {
if (timeout == 0) {
port_irq_unlock(lock);
return MB_ERR_EMPTY;
}
self->recv_buf = msg;
self->wait_result = MB_OK;
list_insert_by_prio(&mb->recv_wait_list, &self->wait_node);
task_block(self, timeout);
port_irq_unlock(lock);
return self->wait_result;
}
/* 取出当前数据 */
*msg = mb->msg;
mb->status = MB_EMPTY;
/* 关键的对偶逻辑:把一个等待发送的任务"放进来" */
if (!list_empty(&mb->send_wait_list)) {
tcb_t *sender = list_pop_front(&mb->send_wait_list);
mb->msg = sender->recv_buf; /* 之前 send 时记下的 */
mb->status = MB_FULL;
sender->wait_result = MB_OK;
task_unblock(sender);
}
port_irq_unlock(lock);
return MB_OK;
}
|
几个细节值得指出来。
task_block 这个函数内部做了几件事:把任务状态置为 BLOCKED,从就绪链表摘下,如果有超时还要往定时器链上挂一个回调,最后调用调度器
schedule() 强制切换。task_block 一旦返回,意味着任务已经被唤醒重新跑起来——可能因为有人
recv 了,也可能因为超时了,wait_result 字段就是用来区分的。
recv_buf 字段被复用了:发送任务被挂起时它存的是"要发什么",接收任务挂起时存的是"接收到的写哪里"。这种字段复用在嵌入式内核里很常见,省下来的几字节
RAM 在 4KB 系统上能多挂几个对象。
整段代码里没有 malloc/free。所有节点都是任务自带的、所有数据都是引用传递。这就是为什么
RTOS 的 IPC 原语可以在中断里、在内存分配器初始化之前的早期阶段就用上——它对外部的依赖几乎为零。
六、什么场景下你应该选邮箱
理论清楚了,回到现实问题:项目里到底什么时候用邮箱、什么时候用消息队列、什么时候用信号量?
下面这四个场景,我在过往项目里反复见过、也亲手写过。每个场景搭配一张示意图,你大致能识别出"哦原来这种用邮箱合适"。
场景 1:ISR 把最新值丢给处理任务
最经典的用法。中断里采到一份数据(ADC、定时器计数、编码器位置),扔进邮箱,处理任务在邮箱上阻塞等。
为什么选邮箱而不是队列? 因为控制场景下你只关心"最新值"。如果队列里堆了 5
个旧的 ADC 读数,处理任务挨个取过来反而是灾难——基于过期数据算出的控制量,输出到电机上就是抖动。邮箱"后来居上、自动覆盖"的语义,刚好就是你想要的。
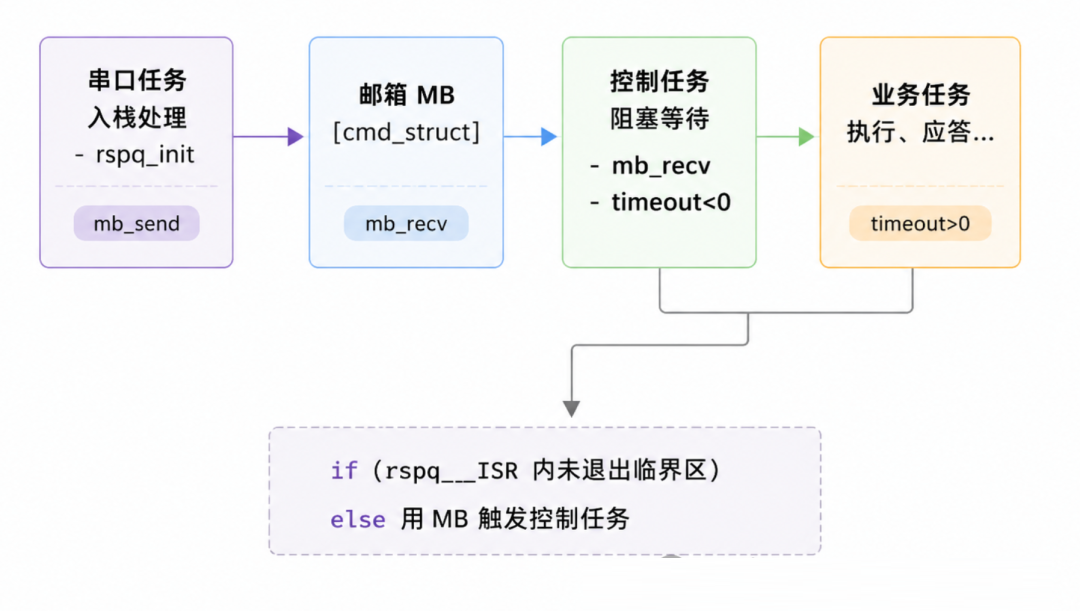
场景 2:命令分发器
一个串口接收任务负责解析协议,解出来的命令丢进邮箱,业务任务处理。
这里有个工程上的关键决策——命令结构体放哪儿? 因为邮箱只传指针,结构体本身不能放在串口任务的栈上(函数返回就没了),通常的做法有两种:
• 用一个小型的内存池,串口任务从池里 alloc,业务任务处理完 free。
• 用全局静态数组做轮询缓冲,串口任务写当前槽位,业务任务读完就行。
两种都行,看你的项目复杂度。我个人在大部分中等规模项目里偏好后者——静态分配心智负担最小,调试也方便。
场景 3:配置热更新
控制类任务需要根据上位机下发的配置实时调参,但调参动作不能阻塞控制循环。
控制任务每个周期开始时用 timeout=0 的方式取一次邮箱——有就更新参数,没有就继续用旧的。这种"非阻塞偷看一眼"的用法把邮箱当成了一个最新值快照寄存器,控制循环节奏完全不受通信任务干扰。
场景 4:单生产-单消费的状态同步
两个任务之间的"我做完了告诉你"——传统做法是信号量加全局变量,但邮箱把这两个动作合二为一。
举个具体例子:传感器校准任务校准完一组数据后通过邮箱通知主任务"完成了,校准结果在这",主任务收到后写入
Flash。比起用信号量通知 + 共享变量取数据的传统组合,邮箱方案少一次锁、少一个全局变量、少一次"数据有效性"的判断。
七、什么时候不该用邮箱
也得说几句不该用的场景,免得你拿着锤子到处找钉子。
需要缓冲多条消息——那是消息队列的活。比如串口要批量收一段数据再处理,或者按键缓冲器要存 N 次按下事件,都得用队列。邮箱在这种场景下要么丢数据要么强行阻塞,体验都不好。
只需要"事件发生了",不需要数据——直接用二值信号量或事件标志组。邮箱拿来传
NULL 是一种浪费,控制块本身占的字节比一个信号量多。
多生产者写入同一个邮箱——技术上能跑,但语义会让人迷惑。后写的会覆盖先写的,谁的"信"被丢掉、谁的活儿白干了,你得自己想清楚。这种场景考虑用队列加个
tag 字段区分来源更清晰。
八、几个实战中容易踩的坑
讲完正确用法,反过来说几个出过血的坑。
坑一:把栈上变量的地址塞进邮箱。
void some_task(void) {
sensor_data_t data;
fill_data(&data);
mailbox_send(mb, &data, 0); /* ← 大问题 */
/* 函数返回,data 所在栈空间就废了 */
}
|
接收方拿到这个指针时,那块内存可能已经被其他局部变量覆盖。邮箱只传指针不复制数据,发送方必须保证指针指向的内存在接收方读完之前一直有效。要么用静态变量、要么用堆、要么用内存池。
坑二:在中断里调阻塞版本的 send。
void UART_IRQHandler(void) {
/* ... */
mailbox_send(mb, &pkt, INFINITE); /* ← 中断里阻塞?系统挂死 */
}
|
中断没有任务上下文,"阻塞"对它没有意义——它没法被挂起。多数 RTOS 在这种调用上会直接断言失败,但调试模式可能不开断言,运行时表现就是莫名其妙的死机。中断里一律用
timeout=0 的版本,并且妥善处理"满了"的返回值。
坑三:忘了对偶唤醒导致饿死。
如果你看完前面的代码自己撸一个邮箱,漏掉 recv 里那段唤醒发送方的逻辑,整个机制还能跑——大部分单元测试都过得了。但在高并发场景下,等待发送的任务可能永远醒不过来,因为后续的
send 都直接成功了,没人去管那条阻塞链表。这种 bug 在压测时才暴露,找原因能让你掉一把头发。正反两个方向的唤醒都不能漏。
坑四:优先级反转。
低优先级任务持有邮箱里的"满"状态(迟迟不读),高优先级任务想发送被阻塞,中等优先级任务又把低优先级抢占了——结果高优先级反而被两个低的等。邮箱机制本身不解决优先级反转(互斥锁才有优先级继承),如果你的关键路径上有这种风险,要么改用互斥锁保护共享数据,要么从设计上保证邮箱的发送-接收节奏对等。
收尾
一句话总结:邮箱就是容量为 1 的消息容器,专门解决"传一份最新数据 + 顺便通知"这类高频小场景。
它不是消息队列的退化,不是信号量的扩展。它在工程上是一类独立的、值得专门理解的机制,因为:
• 内核控制块占用极小,在 RAM 紧张的小芯片上有明确优势。
• "覆盖式更新"的语义贴合控制类、状态同步类应用。
• 内部的双向唤醒机制让发送和接收之间的协作非常顺滑,不浪费 CPU。
• 中断和任务上下文都能用(注意接口区分),是 ISR 到任务通信的首选之一。
下次你在 FreeRTOS 里看到 xQueueCreate(1, sizeof(void *)),或者在
RT-Thread 里用 rt_mb_create ——你应该能想起本文里画的那些图,知道每次 send/recv
在内核里走过的那条路。
理解机制不是为了背 API,而是为了在选型时知道为什么。希望这篇拆解能在你下一次设计任务间通信时,多给你一个清晰的判断依据。 |







 订阅
订阅