| 编辑推荐: |
嵌入式RTOS(实时操作系统)项目中任务划分和任务间通信的选型原则与实战经验,希望对你的学习有帮助。
本文来自于一枚嵌入式码农,由火龙果软件Alice编辑、推荐。
|
|
搞嵌入式开发的,迟早会碰到RTOS。
一旦项目复杂度上来——多路传感器采集、屏幕刷新、通信协议解析、电机控制要同时跑——裸机的 while(1) 就开始力不从心了。上RTOS是顺理成章的事。
但我这些年review过不少项目代码,发现一个普遍的问题: RTOS是用上了,任务也创建了一堆,可整个系统的任务划分和通信方式一塌糊涂。 优先级随便给,队列和信号量乱用,任务之间耦合得死死的,改一个地方牵一发动全身。
说白了,很多人只是把RTOS当成一个"能跑多个while(1)"的工具,没有真正理解任务该怎么拆、通信该怎么选。
今天这篇文章,我把这些年在实际项目中积累的任务设计和通信选型经验,掰开了讲清楚。
任务到底该怎么拆?
新手最常犯的错误就是"按功能模块建任务"——传感器一个任务、LCD一个任务、按键一个任务、LED一个任务、蜂鸣器一个任务……最后搞出十几个任务,栈空间炸了不说,调度开销也大得离谱。
任务划分的核心依据不是功能模块,而是实时性需求和执行周期。
举个具体例子。一个工业控制器项目,有以下功能:
- ADC采集(10ms周期)
- PID运算(10ms周期)
- 屏幕刷新(100ms周期)
- 按键扫描(20ms周期)
- Modbus通信(事件驱动)
- LED状态指示(500ms周期)
按功能拆,6个任务。但如果你仔细看,ADC采集和PID运算周期一样、时序上强关联,完全可以合并成一个任务。LED指示和屏幕刷新都是低优先级的显示类操作,也可以合并。
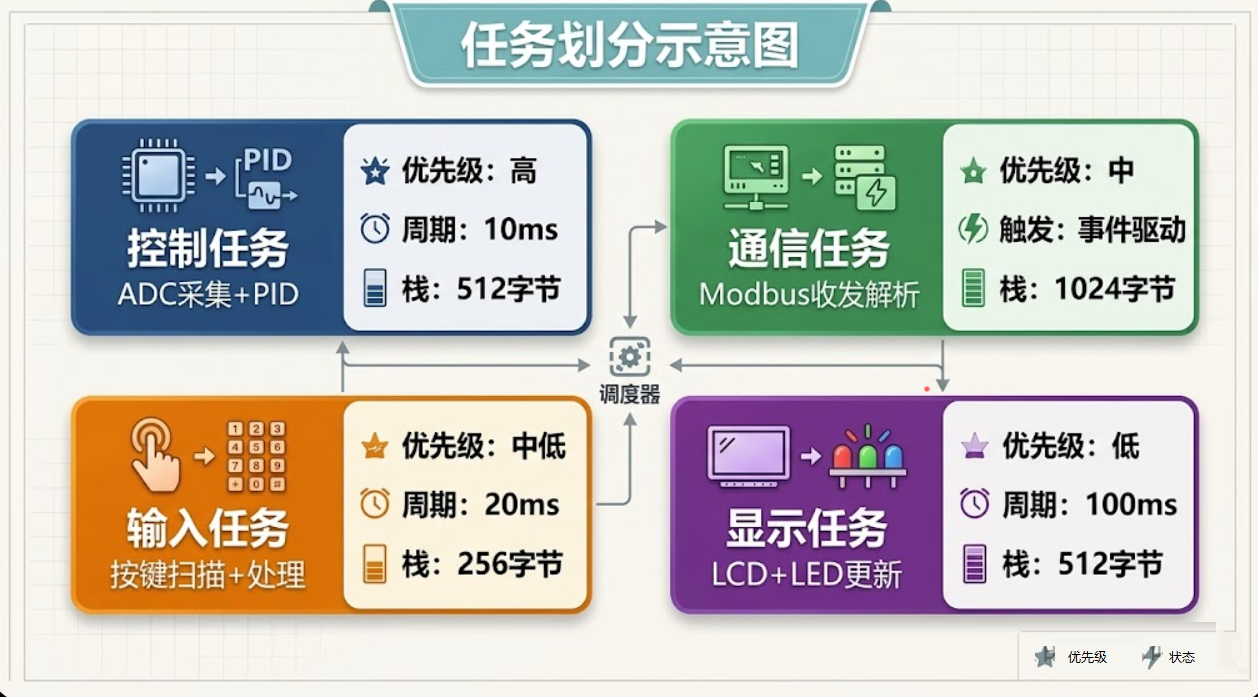
合理的划分应该是这样:
6个功能,4个任务,每个任务的职责边界清晰。记住几条原则:
1. 实时性相同的功能合到一起。 周期一致、优先级一致的功能,没必要分开,分开只会增加通信开销。
2. 强耦合的功能合到一起。 ADC采完立刻做PID,数据在局部变量里直接传递,比跨任务发消息高效得多。
3. 任务数量尽量精简。 每个任务都要吃栈空间,都会参与调度。在Cortex-M0这种小核上,5个任务和15个任务的调度开销差距是肉眼可见的。
4. 优先级要反映真实的紧迫程度。 电机控制、安全检测这类硬实时任务给高优先级,UI刷新这种慢半拍用户也感知不到的给低优先级。别拍脑袋给。
任务间通信有哪些武器?
任务拆好了,接下来的问题就是: 任务之间怎么传递数据、怎么同步执行顺序?
RTOS提供的通信机制不少,但很多人搞不清楚什么场景该用什么。先看一张全景图:
很多人在选型上犯的错误,归纳起来就两种:
- 该用队列的地方用了全局变量。 传感器采集任务把数据往全局数组里写,显示任务直接去读——没有任何同步保护。数据撕裂、读到半截值,这种Bug查起来要命。
- 该用信号量的地方用了队列。 明明只是通知一下"数据准备好了",非要往队列里塞一个没意义的值。浪费内存不说,还增加了不必要的复杂度。
下面逐个说清楚。
消息队列——任务间传数据的主力
消息队列是用得最多的通信方式,没有之一。凡是涉及到"一个任务产生数据、另一个任务消费数据"的场景,优先考虑队列。
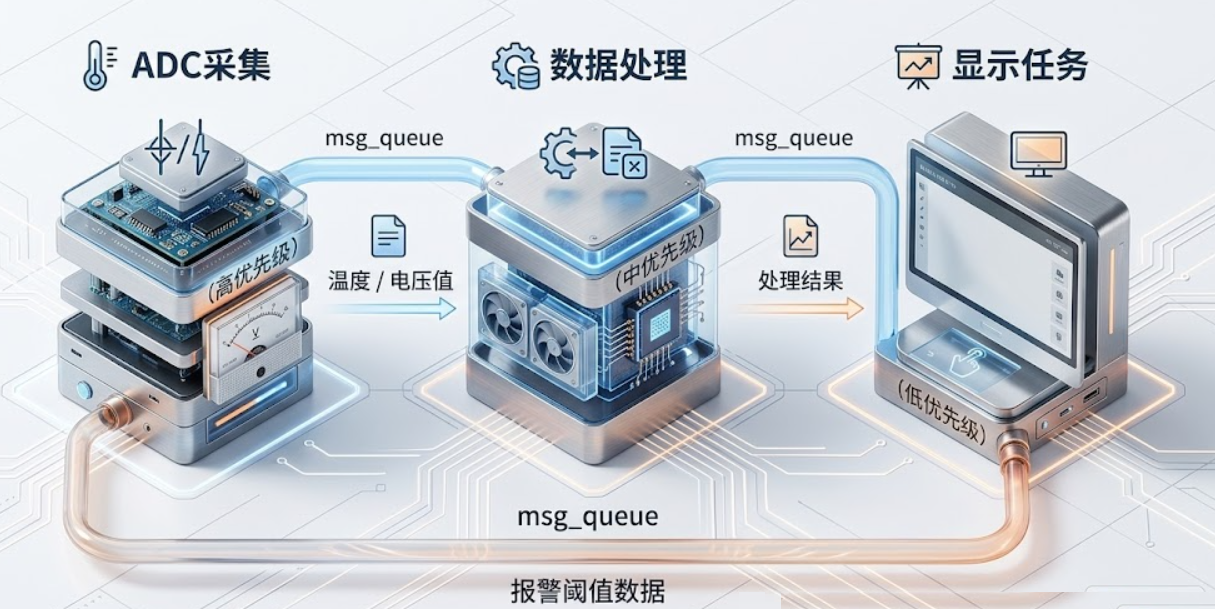
看一个典型的数据采集流转架构:
队列的好处很直接: 生产者和消费者完全解耦,速度不一致也没关系 。ADC任务10ms采一次,显示任务100ms刷新一次,中间有队列做缓冲,各跑各的节奏。
实际使用时注意几点:
队列深度不是越大越好。 很多人怕丢数据,队列深度给个几百。实际上,如果消费速度长期跟不上生产速度,队列再深也迟早满。深度一般给到"正常突发量的2~3倍"就够了,关键是要处理好队列满时的策略——是丢弃最旧的、还是阻塞等待、还是返回错误?这个要根据业务决定。
传指针还是传值? 小数据(几个字节的结构体)直接传值拷贝进队列,简单安全。大数据(比如一帧图像、一包协议数据)传指针,但你必须保证:数据在消费者取走之前不会被修改或释放。这点搞不好就是野指针,非常危险。
/* 推荐的队列消息结构体设计 */
typedef struct {
uint8_t msg_id; /* 消息类型标识 */
uint8_t src_task; /* 来源任务 */
uint16_t data_len; /* 数据长度 */
union {
uint32_t value; /* 小数据直接传值 */
void *ptr; /* 大数据传指针 */
} payload;
} task_msg_t;
|
这种设计在实际项目中非常实用:统一消息格式,接收方根据 msg_id 做分发处理,清晰且好维护。
信号量——轻量级的"拍一下肩膀"
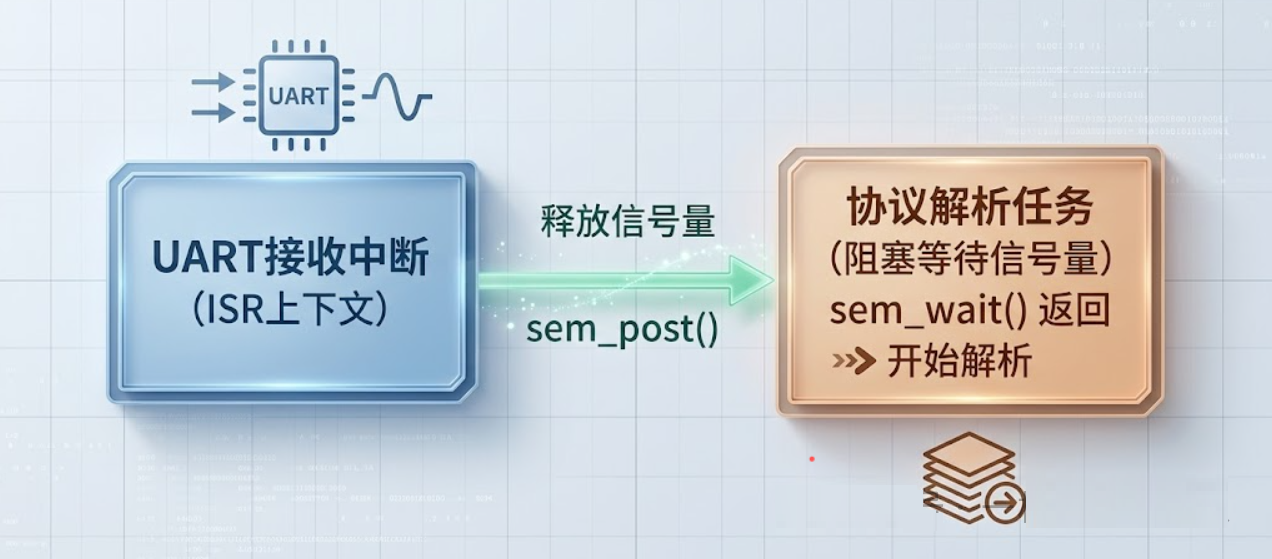
信号量不传数据,只做通知和同步。最经典的场景: 中断服务程序(ISR)通知任务去干活。
ISR里做的事越少越好,这是铁律。接收中断里只管把数据丢进缓冲区、释放一个信号量,剩下的解析工作交给任务上下文去做。
二值信号量 vs 计数信号量:
- 二值信号量 :就像一个开关,只有0和1。适合"通知一次、处理一次"的场景。
- 计数信号量 :可以累加。适合资源计数的场景,比如有3个DMA通道可用,初始值设为3,每用一个减一,释放一个加一。
一个容易踩的坑: 二值信号量会丢通知。 如果ISR连续post了3次,但任务只来得及wait了1次,那另外2次通知就丢了。如果你的业务不允许丢,要么用计数信号量,要么用队列。
互斥量——共享资源的保护伞
互斥量和信号量长得很像,但用途完全不同。互斥量解决的是 互斥访问 问题:同一时刻只允许一个任务访问某个共享资源。
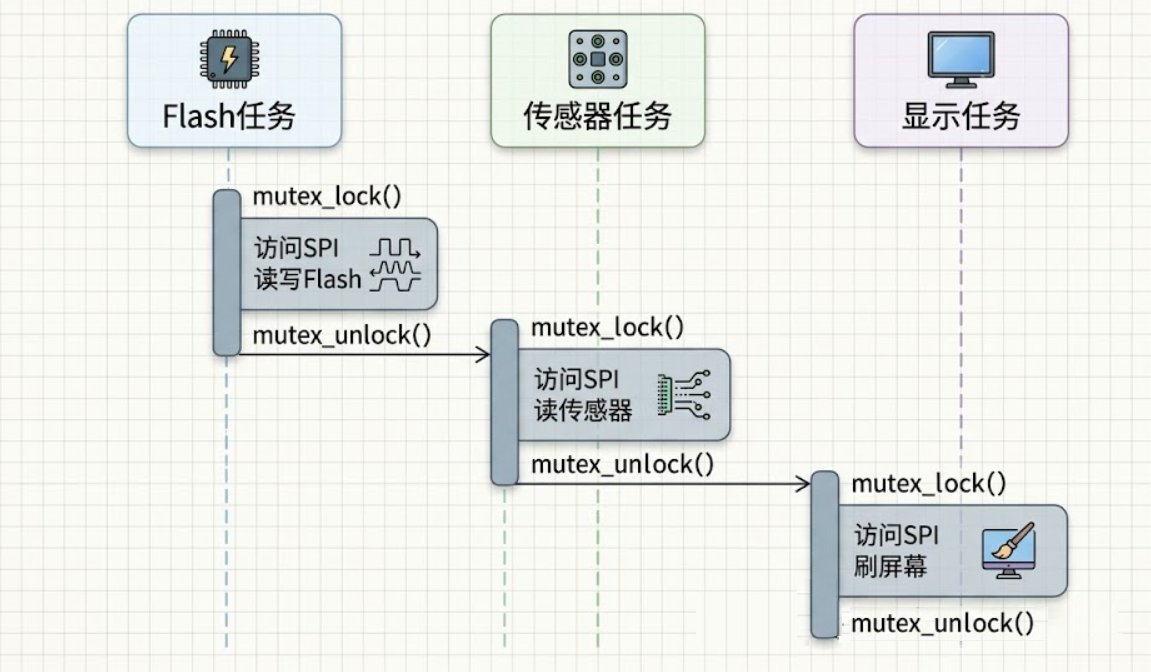
最典型的场景:多个任务都要用SPI总线读写不同的外设。
互斥量相比信号量有一个关键特性: 优先级继承。 如果低优先级任务持有锁,高优先级任务在等锁,RTOS会临时把低优先级任务提升到高优先级,让它尽快执行完释放锁。这就避免了经典的 优先级反转 问题。
用信号量做互斥也能"凑合用",但没有优先级继承机制,项目复杂之后必出问题。该用互斥量的场景,别偷懒用信号量代替。
互斥量使用的核心纪律: 持有锁的时间尽可能短。 拿到锁就干活,干完立刻释放,中间不要有任何阻塞操作。我见过有人拿着互斥量的锁去等队列消息——那等于锁了一条SPI总线,其他任务全部卡死。
事件标志组——多条件联合触发的利器
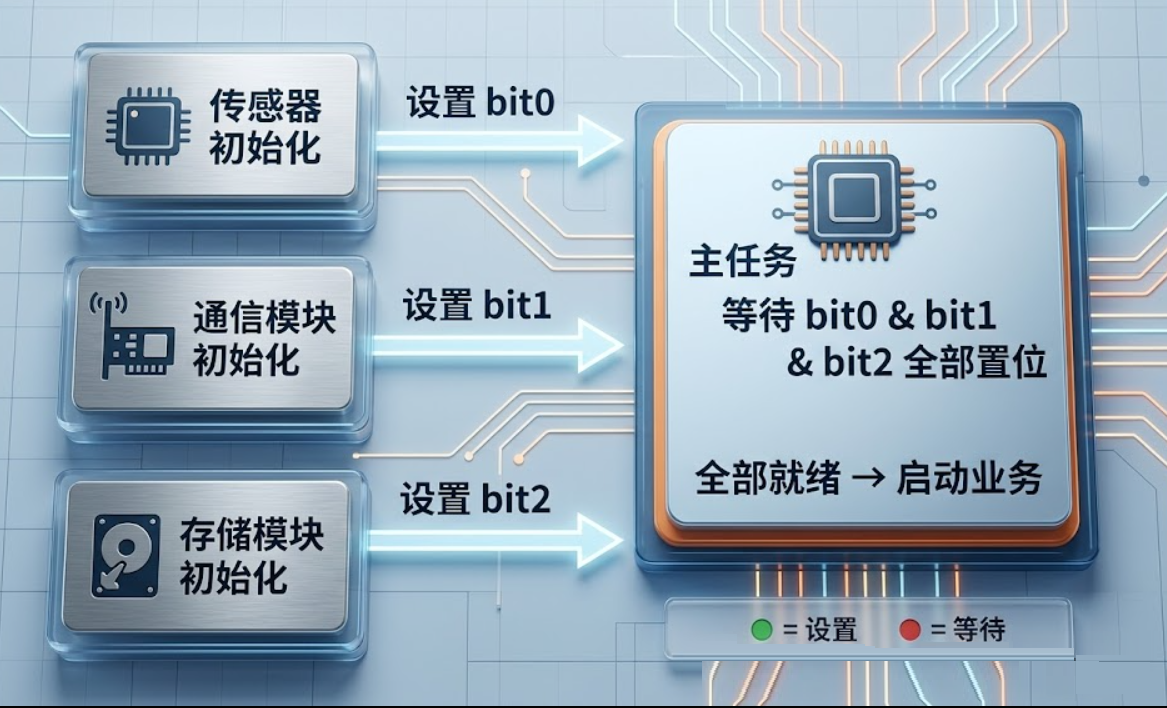
事件标志组用得相对少,但在特定场景下非常好用。它的核心能力是: 一个任务可以同时等待多个条件,全部满足(AND)或任一满足(OR)时才继续执行。
举个实际例子:系统初始化阶段,主任务要等所有子模块都初始化完成后才启动业务逻辑。
如果不用事件标志组,这个逻辑你要自己维护3个全局变量加一堆if判断,丑且容易出错。
一些血泪教训
聊完了各种机制的用法,再说几条实战中反复验证过的经验:
1. 永远不要在ISR里做阻塞操作。 ISR中不能调用会阻塞的API(比如带超时的queue_send、mutex_lock)。只能用带 FromISR 后缀的非阻塞版本。这是很多新手崩溃的根源——系统莫名其妙卡死,多半是ISR里调了阻塞API。
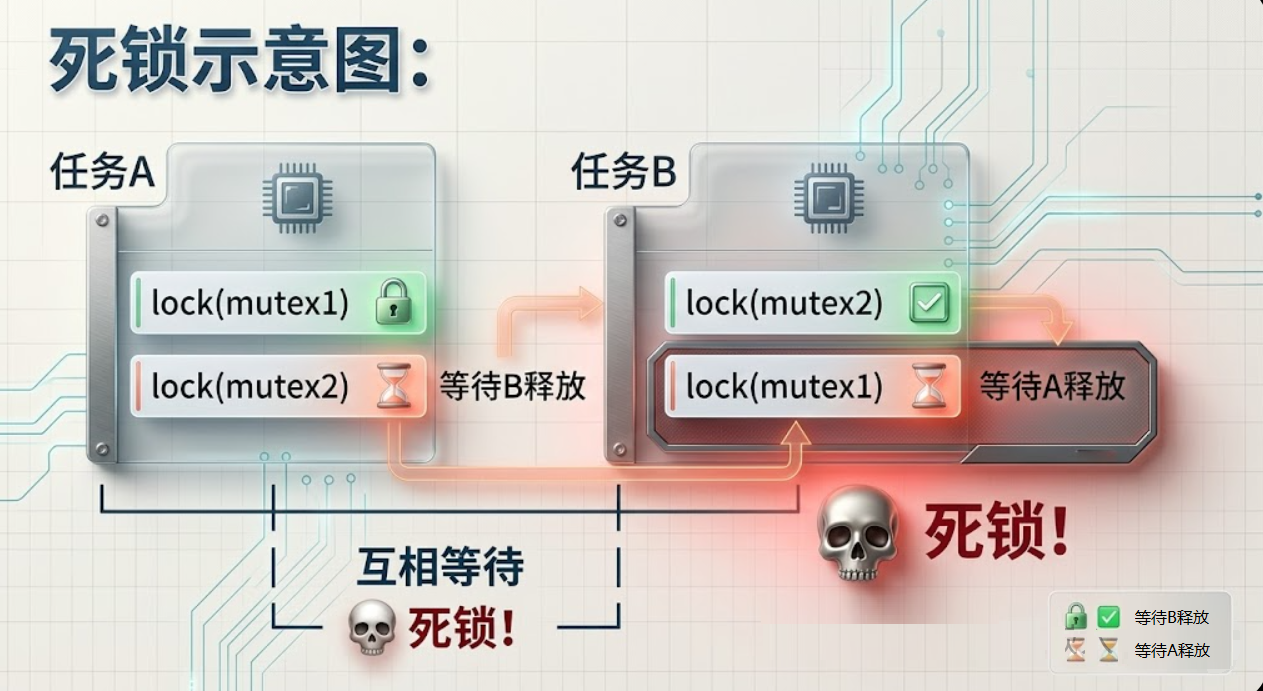
2. 警惕死锁。 任务A先锁mutex1再锁mutex2,任务B先锁mutex2再锁mutex1——经典死锁。项目规范里必须约定 加锁顺序 ,所有任务按同样的顺序获取多把锁。
3. 给通信操作加超时。 队列接收、信号量等待,都要设置合理的超时时间,不要用"永久等待"。永久等待意味着一旦对方出了问题,你这边直接失联,还没有任何错误信息可以排查。加超时,超时后记录日志、做异常处理,至少系统还能运转。
4. 监控任务栈使用情况。 大多数RTOS都提供栈水位查询的API,项目调试阶段一定要用起来。栈溢出的后果是不可预测的——可能当时不崩,跑着跑着突然挂在一个完全不相关的地方,查起来能把人逼疯。
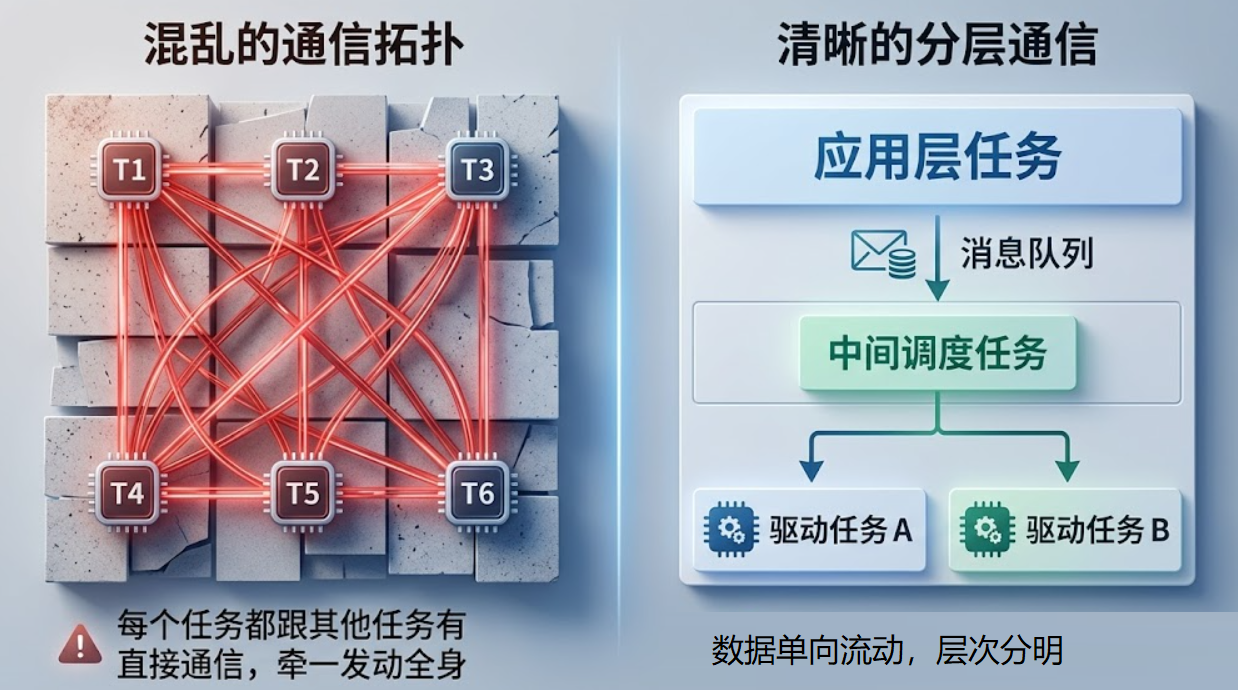
5. 别把通信做成蜘蛛网。 如果你画出任务间的通信 拓扑图 ,发现是一团乱麻——每个任务跟好几个任务有直接的队列或共享变量——那说明你的架构需要重新审视了。好的设计应该像下面这样,有清晰的层次和流向:
写在最后
回头看这篇文章谈的这些问题——任务怎么拆分、通信方式怎么选、如何避免耦合——你会发现,它们的本质并不是RTOS的API怎么调用,而是 软件架构该怎么设计 。
API文档谁都能翻,函数签名记不住可以查。但为什么有的人写出来的RTOS项目结构清晰、稳定运行几年不出大问题,而有的人写出来的代码改一处崩三处?差别就在于对 设计 的理解深度。
这些年我越来越认识到一件事: 嵌入式开发者不能只会写驱动、调寄存器,更要建立系统性的软件设计思维。
而设计思维的核心,就是 设计模式 。
你看这篇文章里其实已经用到了好几种设计模式的影子——消息队列本质上是 生产者-消费者模式 ,统一消息结构体做分发是 命令模式 的雏形,互斥量保护共享资源是 代理模式 的思想,事件标志组的多条件同步和 观察者模式 一脉相承。
只是很多人没有意识到,也没有刻意去学习和归纳。
如果你想让自己的RTOS项目(或者任何嵌入式项目)在架构层面上一个台阶,我真心建议你系统学一学设计模式。不用学Java那套二十三种全家桶,嵌入式场景下常用的也就那么几种,但每一种都能帮你把代码组织得更干净、更好改、更不容易出Bug。 |






 订阅
订阅