|
摘要:本文实例介绍了SpatialHadoop平台,它是第一个基于成熟MapReduce对空间数据具有原生支持的框架。SpatialHadoop是对Hadoop的做了一个全面的扩展,使其核心功能可以支持空间数据。因此,对于处理空间数据,SpatialHadoop与目前存在的Hadoop项目相比具有更好的性能。SpatialHadoop主要包括一个简单的空间高级语言、两级空间索引结构,以及建立在MapReduce层的基本空间组件和三个基本空间操作(范围查询、K-NN查询和空间链接)。其他的空间操作同样也可以在SpatialHadoop平台上进行部署。本文展示了一个基于SpatialHadoop的原型系统。系统运行环境为Amazon EC2集群,空间数据是从Tiger文件和OpenStreetMap上获取,大小分别为60GB和300GB。
1、引言
许多类似于MapReduce系统,例如Hadoop等,发展的已经比较成熟,而且也有许多基于此的应用程序,如机器学习[3]、兆字节排序[9]、图像处理[1]等,多年来也被证实了对于大数据分析来说是一个有效的框架。与此同时,对于空间数据也进入了一个爆炸的时代,如智能手机、医疗设备、太空望远镜等不同来源的数据。然而,不幸的是,对于支持空间数据而言,Hadoop存在着先天的不足,它的核心框架并不能很好的支持空间数据的特性。现有基于Hadoop处理空间数据主要集中在特定的数据类型和数据操作等方面,如根据轨迹进行范围查询[6]、基于点状数据进行KNN连接[5,13]等。而且这些对空间数据操作的效率也受到Hadoop内在因素的限制。
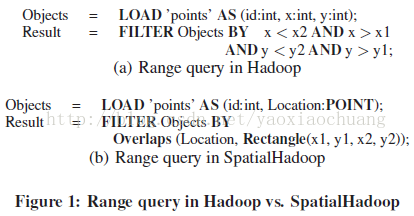
本文提出的SpatialHadoop平台可以通过在线的资源获取(http:// spatialhadoop.cs.umn.edu/.)。SpatialHadoop是基于Hadoop一个全面的扩展(约12000行核心代码),使从代码层对空间结构和空间数据进行了支持。这保证了SpatialHadoop的工作方式与Hadoop的一致性,通过调用Map和Reduce函数库来完成工作,因此现有Hadoop项目也能够在SpatialHadoop上运行。然而,对于处理空间数据而言,SpatialHadoop与Hadoop相比具有更好的性能。如图1所示,(a)和(b)分别表示基于Hadoop和SpatialHadoop何进行空间范围查询。70000000条的空间数据要素在20个节点的集群上运行同样的查询,Hadoop需要200s,而SpatialHadoop只需2s。
SpatialHadoop基于Hadoop所有层都嵌入了空间结构,包括语言层、存储层、MapReduce层以及业务层。在语言层,提供了一种简单高级语言用于空间数据分析,即使非技术人员也可以进行操作。在存储层,提供了一个两级空间索引机制,即节点之间分区数据的全局索引和每个节点组织数据的局部索引。通过这样的索引机制建立了格网索引[7]、R-tree[4]和R+-tree[11]索引。在MapReduce层,嵌入了两个新的空间组件,通过该组件可以获取索引文件,即SaptialFileSplitter和SpatialRecordReader。SaptialFileSplitter通过修剪分区来利用全局索引,但不会导致生成查询结果;而SpatialRecordReader利用局部索引来获得每个分区内有效的访问记录。在业务层,提供了一系列空间操作(范围查询、KNN和空间连接),实现了在MapReduce层应用索引和新的空间组件。其他的空间操作也可以通过同样的方式嵌入到该平台中。
SpatialHadoop是一个开源共享的平台,允许研究社区的每一位贡献者对其功能进行拓展。针对不同的应用,SpatialHadoop中的核心基础组件都能够帮助用户高效的实现更多空间操作。通过一个案例研究,SpatialHadoop已经拥有了三个空间操作,即范围查询,K-nearest-neighbor 查询和空间连接。我们设想,在未来SpatialHadoop将扮演者一个研究载体的角色,更多的研究者将在此基础上共享他们的空间操作和分析工具,形成一套丰富的体系供开发者、实践者和科研者使用。
本文将通过一个真实的原型系统来介绍SpatialHadoop。该系统采用了两套数据,数据分别来自Tiger文件集[12]和OpenStreetMap[10],运行环境为Amazon EC2集群。Tiger文件集包含7000,0000条记录(大小为60GB),有道路、水体和其他的美国地理信息。OpenStreetMap包含全世界的道路、热点和建筑物边界,数据大小为300GB。
2、SpatialHadoop框架
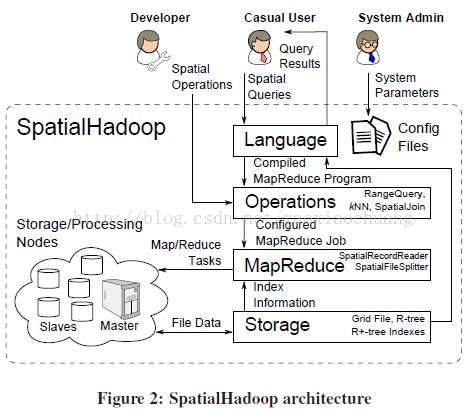
图2为SpatialHadoop系统框架。SpatialHadoop集群主要包括一个主节点,用来接收用户的查询,并将其分割为更小的任务,并通过多个从节点类执行这些任务。根据与SpatialHadoop交互目的,用户可以分为三类:普通用户、开发者和管理者。普通用户(非技术人员)可以通过该平台提供的语言处理他们的数据集;开发者(更高级用户)可以实现一些针对具体应用的新空间操作功能;管理者能够通过调整配置文件中的系统参数来控制整个系统。
SpatialHadoop采用了分层设计,主要包含四层,即语言层、存储层、MapReduce和业务层。语言层提供了一个简单高级类SQL语言,支持空间数据类型和操作。存储层包含了全局和局部两个空间索引结构。全局索引用于计算节点间的数据划分,局部索引用于节点内部数据组织。MapReduce层拥有两个新的空间组件,即SpatialFileSplitter和SpatialRecordReader,分别利用全局(修剪数据但不产生查询结果)和局部索引。业务层对基于空间索引和MapReduce层新组件实现的多种空间操作进行了封装。SpatialHadoop与生具有高效实现三个基础空间操作,即范围查询、KNN和空间连接。其他的空间操作也可以通过类似的方法嵌入到该平台中。
3、语言层
SpatialHadoop提供了一种简单高级语言,非技术人员也可以通过该语言与系统进行交互。该语言内置支持空间数据类型、空间基础功能以及空间操作。空间数据类(点、矩形和多边形)定义了文件加载过程中的输入文件模式。空间基础功能包括测距、叠加以及MRB(最小外包矩形)。测距即通过空间属性计算两要素质心之间的距离;叠加分析是发现两个要素之间是否有重叠区域;而MRB是用来计算面状要素的最小外包矩形。空间操作包括范围查询、KNN和空间爱你连接用来输入带有空间属性的文件和生成输出文件结果。
SpatialHadoop并没有从底层开发一个新的空间语言,而是扩展了Pig Latin[8]。这样不仅保留Pig Latin语言的原始功能,同时也加入了空间结构。尤其是SpatialHadoop语言重写了关键的FILTER和JOIN类库,当输入参数具有空间谓词时,将分别执行范围查询和空间连接。例如,当FILTER关键词带有Overlays谓词时,SpatialHadoop将执行范围查询操作。对于KNN查询,引入了一种新的KNN算法。例如计算查询点query_loc距离最近的100间房屋。
houses = LOAD ’houses’ AS (id:int,loc:point);
nearest_houses = KNN houses WITH_K=100USING Distance(loc, query_loc);
4、存储层
在存储层,SaptialHadoop增加了新的空间索引。而且索引适合MapReduce运行环境。通过索引客服了Hadoop仅支持无索引堆文件的限制。在Hadoop上直接运用传统的空间索引具有两大挑战。一方面传统空间索引是采用过程编程范式,而SpatialHadoop采用的是MapReduce编程范式;另一方面传统索引采用局部文件系统,而SpatialHadoop采用的是Hadoop分布式文件系统,这样的方式有一个内在的限制,文件仅以一种附加的方式被写入,同时一旦写入就不能被修改。为了克服这些挑战,SpatialHadoop通过两级组织其索引,即全局索引和局部索引。全局索引通过集群中的节点分割数据,而局部索引在每一个节点内部高效组织数据。全局和局部索引的分离适合MapReduce编码范式。全局索引用于准备MapReduce工作,而局部索引用于处理Map任务。将文件拆分成更小的文件,允许每个内存分区索引并以顺序的方式将其写入文件。
全局索引保存在主节点的内存中,而每一个局部索引存储在从节点的文件块(通常为64M)中。SpatialHadoop支持格网文件[7],R-tree[4]和R+-tree[11]索引。通过发行新的文件系统命令writeSpatialFile(SaptialHadoop中)为已经存在的文件建立索引,用户需要明确输入文件、列建立索引和索引类型。
通过MapReduce工作建立索引经过三个阶段,即分区,局部索引和全局索引。在分区阶段,一个文件被按照空间分区,每一个分区包含一个矩形适合一个文件块(64MB)。格网索引通过一致的网格进行分区,而R-tree和R+-tree通过一个分布清晰的R-tree分区,从输入文件中随机读取一个样本、批量加载此样本到临时内存R-tree,然后使用边界的叶节点分割整个文件。值得注意的是,在格网和R+-tree索引中,当每一个记录被写入最合适的分区时,如果重叠多个分区,那么这些记录可能被复制[4]。在查询过程中,重复的记录会被后期处理掉,这样就避免了产生重复的结果。在局部索引阶段,根据被构造的索引类型,每一个分区独立创建并同步到一个HDFS块文件中,这个块文件需要标记分区的MBR。因此,每一个分区都有一个固定大小的文件(64M),局部索引在一次性写入此本之前在内存中构建。最后一个阶段是全局索引。包含局部索引的文件组成一个大的文件,全局索引通过他们的MBRS来建立所有分区的索引并存储在主节点的主存中。一旦系统发生故障,全局所有就会根据需要重新建立。
5、MapReduce层
传统的Hadoop MapReduce层设计的目的是为了处理不带有索引的堆文件。而SpatialHadoop中的空间操作是以带有空间索引的文件为输入的,处理方式是有区别的。此外,一些空间操作,如空间连接等,是对二元操作,需要两个输入文件作为输入条件。为了能够处理这些索引文件,SpatialHadoop在MapReduce层引入了两个新的组件,即SpatialFileSplitter和SpatialRecordReader,利用全局和局部索引分别对不同的数据进行高效访问。
SpatialFileSplitter需要输入一个或两个空间索引文件,除非用户提供过滤功能。然后,利用全局索引修剪文件块,这些修剪块不会导致查询结果(如外围查询范围),索引创建的同时,基于最小外包矩形进行分配。在进行需要两个输入文件的二元操作中,SpatialFileSplitter采用两个全局索引去选择需要被一起处理的文件块的对组,作为一个文件(例如,在空间连接中进行叠加分析块)。SpatialRecordReader利用局部索引,通过局部索引获取一个分块中允许的记录,而不是循环遍历所有记录。它从指定的分区中读取局部索引,将这个索引的指针传递给Map函数,该函数通过这个索引去选择在整个记录中不需要迭代的处理记录。同时,SpatialFileSplitter和SpatialRecordReader帮助开发者编写许多类似于MapReduce程序的空间操作。
6、业务层
存储层建立的空间索引,以及MapReduce层新的组件保证了SpatialHadoop可以实现高效的空间操作功能。在这个实例中,本文展示了范围查询、KNN和空间连接三个案例功能的实现。展示了如何使用SpatialHadoop中存储层和MapReduce层。其他的空间操作如KNN连接和最短路径分析也能够通过如下类似的方法实现。
在范围查询当中,SpatialFileSplitter利用全局索引选取仅仅覆盖查询范围的区块。每一个查询出来的区块都将通过SpatialRecordReader提取在该块中的局部索引,然后基于这个索引执行一个传统的范围查询去寻找匹配的记录。对于建立索引过程中重复的记录,采用参考点副本避免技术[2]来确保每一个结果记录都只出现一次。
KNN操作运用于两次迭代操作当中。第一次迭代,SpatialFileSplitter利用全局索引选取到包含查询点的区块。通过SpatialRecordReader来提取出这个区块中的局部索引,然后在这个区块中查找KNN。为了验证查询的结果是否正确,以查询点作为圆心,以Kth邻近目标作为半径,绘制一个测试圆。如果测试圆在处理的区块中完全符合,那么结果就认为是正确的。如果测试圆覆盖到了其他的分区,将通过第二个迭代来处理这些重叠区域。
对于空间链接,SpatialFileSplitter在两个文件中利用两个全局索引去查找所有重叠区域组对。每一对都通过SpatialRecordReader来处理,SpatialRecordReader采用局部索引去查找重叠的记录。
7、演示情景
本文展示了一个SpatialFileSplitter原型系统(http://spatialhadoop.cs.umn.edu/),该系统环境为具有20个节点的Amazon EC2集群。采用了两份数据集,包括Tiger[12]文件集和OpenStreetMap[10]。对已Tiger文件集,本文提取出了三个文件包括美国的现有的道路段、河流和湖泊。OpenStreetMap,本文提取了全球现有的道路段、热点、公园、建筑范围等。参与者可以通过前端机器(例如,笔记本)访问Amazon EC2,而所有的处理都在集群后端执行。
7.1 前端
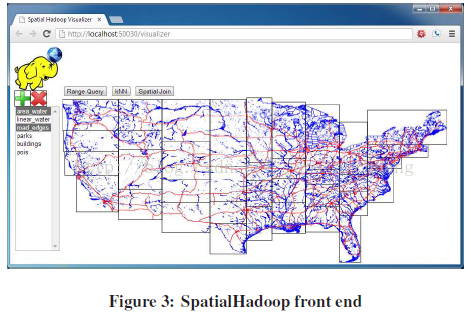
图3展示了系统的前端,主要帮助用户和管理者与SpatialHadoop交互,提供了查询和可视化工具。左边有一个选择控件,显示系统加载的文件列表。用户可以通过加载按钮上传新的文件,也可以通过删除按钮去除已经存在的文件。如果一个文件被选中,文件中的内容会在右侧屏幕中显示。当更多的文件被选中时,他们将以不同的颜色显示以加以区分。如图3所示,蓝色和红色的线状地物分别代表美国的水体(河流和湖泊)和道路。然后用户可以通过上面的工具条执行查询(范围查询、KNN或者空间连接)操作。前端展示了查询执行过程,当查询结束时,其结果会在前端进行显示。
7.2 业务操作
首先,用户通过选择一个文件并点击让它在屏幕中显示。显示过程是通过MapReduce工作将选择文件中的数据生成了一副图像进行输出。生成的图像仅仅包含了文件中的空间属性,并根据数据类型(点,矩形或者多边形)绘制记录。如图3所示,全局的索引边界也可以在屏幕中显示,便于用户进行索引展示。系统允许用户对格网索引和R-tree索引进行对比,会发现格网索引更适合一致的分布式数据集,而R-tree索引更适合不一致的数据。由于数据不一致(不规则),图中的边界是有R-tree索引生成的。显示索引边界是可选的,而且仅显示系统内部。
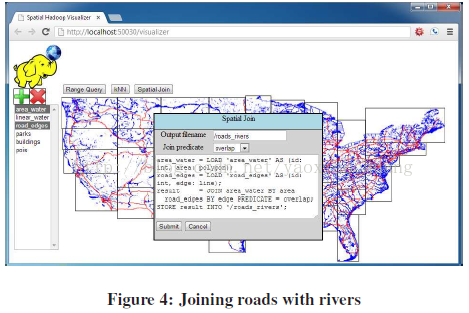
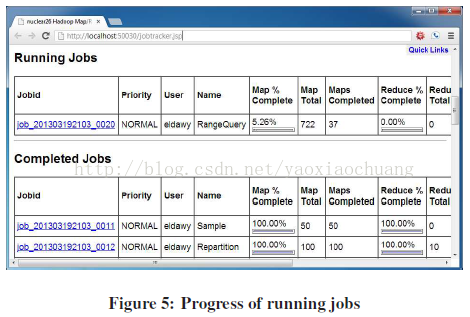
用户选中一个文件,就可以通过选择上面工具条中的操作来执行一个查询。可用的操作包括范围查询、KNN和空间连接。其中只有空间连接操作需要选择两个文件执行二元操作。如图4所以,用户选择一个操作后,会弹出一个对话框,用户可以填写查询参数和输的出文件名称。对于范围查询,用户需要提供查询范围的两个角点。对于KNN,需要提供查询点和邻近对象的个数(k)。对已空间连接,主需提供连接的操作词,默认为叠加。一个有趣的例子是通过连接公园和湖泊去查找所有公园中含有湖泊的公园,并在屏幕上显示结果。如图4所示,设置完查询参数之后,前端会显示SpatialHadoop中查询空间语句写入的过程。一旦用户向系统提交了查询请求,前端将会把查询提交到后台进行处理。如图5所以,用户可以看到系统后台查询处理的整个进程。在所有的工作完成之前,这个管理界面列出了所有正在运行的工作的进展。用户也可以提交随后的查询,这些操作也会同时在后台进行。一旦一个查询执行成功,其结果将会在屏幕上展示。
7.3 与Hadoop对比
为了对比SpatialHadoop和Hadoop,本文又搭建了一个拥有20个节点的Hadoop集群。用户可以在两个集群(Hadoop集群和SpatialHadoop)上执行相同的查询,同时观察两者的执行进度。由于SpatialHadoop保留了传统Hadoop的功能,所以非空间查询也可以在SpatialHadoop上没有任何条件的运行。这样用户可以测试非空间查询功能来比较两个集群的性能。
7.4 安装和配置
SpatialHadoop是开源代码的,在网络上可以公开获取。在实例中,提供了快速安装指南,如何在单机上快速安装和运行SpatialHadoop。第一步下载安装压缩包并解压到本地磁盘;然后,通过编辑配置文件配置安装。之后,启动SpatialHadoop服务,一些操作案例就可以和与服务交互并执行。这些步骤可以通过SpatialHadoop官方网页获得更多信息(http://spatialhadoop.cs.umn.edu/),用户可以看到。 |






