| 编辑推荐: |
本文主要对AUTOSAR简介和AUTOSAR软件架构两个方面做了详细介绍。
本文来自于搜狐,由火龙果软件Alice编辑、推荐。 |
|
AUTOSAR简介
汽车电子领域的软件主要属于嵌入式软件。因此,其发展阶段类似于其他嵌入式系统的软件发展。由于受限于嵌入式硬件本身资源的匮乏,各种硬件产品的种类繁多和各自差异,以及整体嵌入式系统软件的逐步发展,起初的软件设计开发主要是封闭式的。这样有助于开发针对于特定硬件体,充分优化利用资源而特定设计的软件系统。这样的软件系统,是针对于特定硬件和特定应用而设计,其对于硬件资源的充分应用,以及软件本身的执行效率无疑是非常高。
然而,随着硬件本身的逐步发展,其可用资源已经十分充分。另一方面,汽车电子领域应用需求也日趋复杂,软件本身也变得越来越复杂。因此,无论汽车厂还是部件商都感到软件的标准化问题。软件的可管理性,可重复使用性,可裁减性,以及质量保证等等问题被提上了议程。
AUTOSAR 的提出正是基于以上一些软件发展的要求,由几大主要汽车厂商以及部件提供商联合提出的,其中包括
BWM, DaimlerChrysler, Ford Motor, PSA Peugeot, Toyota
Motor, Volkswagen AG, Bosch, Continetal, Siemens VDO
等。AUTOSAR 是针对特定的汽车电子这一领域,提出的一套开放式软件结构。其主体思想是使得软件设计开发更易于管理,软件系统更易于移植、裁剪,以及更好的维护性和质量保证。AUTOSAR
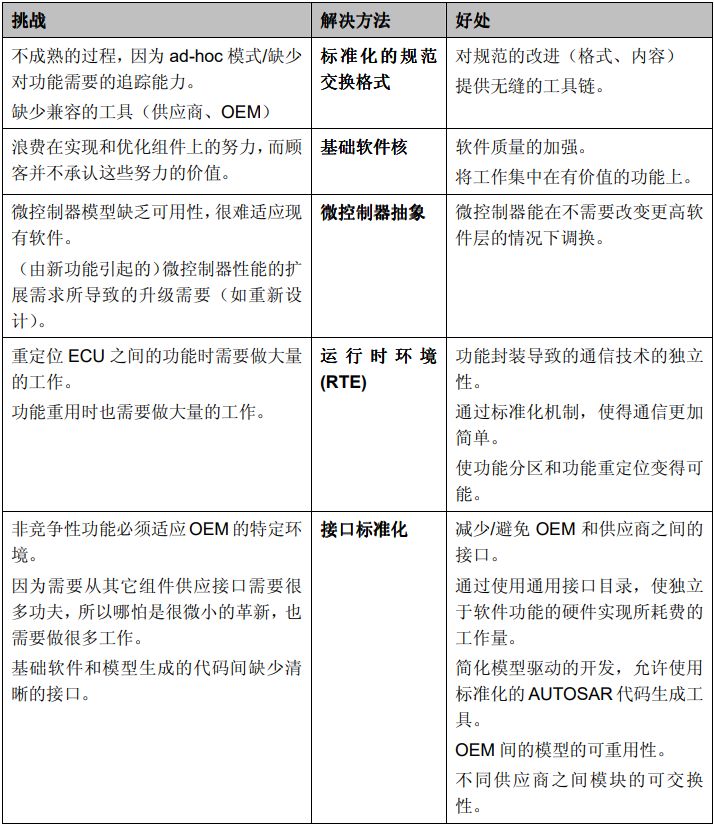
组织所提出的目标以及它所关注的功能领域在下表中列出:

为了实现上述的项目目标,针对在汽车电子行业中面临的一些挑战,AUTOSAR 所采用的解决方案及其好处可以概述如下:
AUTOSAR软件架构
软件的组成与分层
AUTOSAR 的软件组件可以用下图来表示:
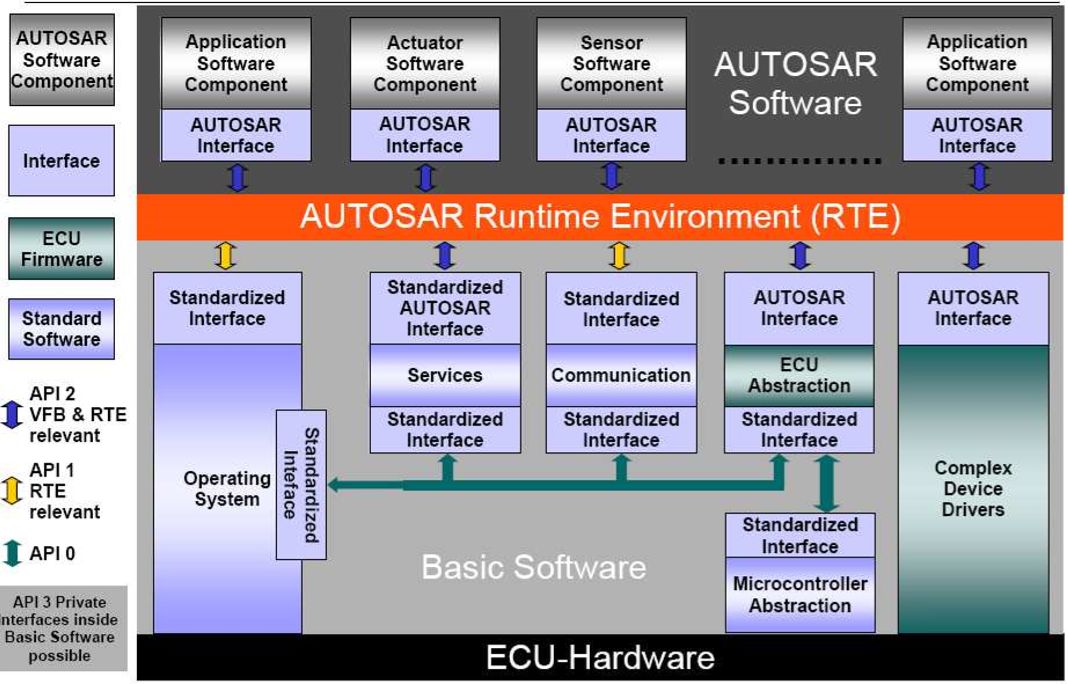
对于上图所示的一些组件,可以根据功能及相互关系对其进行分层,如下图所示:
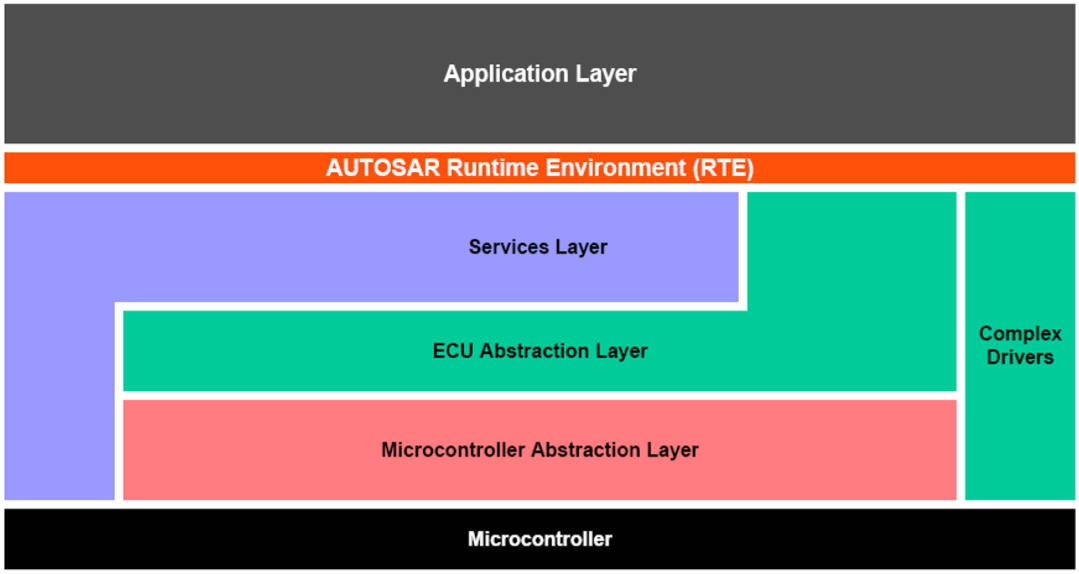
· 微控制器抽象层
这一层是基础软件中的最低一层。它包驱动,这些驱动是软件模块,用来对 μC 内部设备和映射了 μC
外部设备的内存进行访问。
· ECU抽象层
这一层与微控制器抽象层进行对接。它也包了外部设备的驱动。它为访问外设提 供了 API,不管这些外设的位置(μC
内部或外部),也不管它们与 μC 的连接(端口 针脚,接口类型)。
· 服务层
这层是基础软件中的最高层,而且它与应用软件之间有关联:当对 I/O 信号的访问 包 ECU 抽象层中时,服务层提供:
操作系统功能
车辆网络通信及管理服务
存储管理(NVRAM 管理)
诊断服务(包括 UDS 通信及错误内存)
ECU 状态管理
RTE
运行时环境 RTE 是 AUTOSAR ECU 体系结构的核心组成部分。RTE 是 AUTOSAR
虚 拟功能总线(Virtual Function Bus,VFB)的接口(针对某个特定 ECU)的实现,因此,
它为应用程序软件组件之间的通信提供了基本的服务,同时也便于访问包 OS 的基本软件 组件。
应用程序软件组件包独立于 CPU 和所处位置的系统软件。这就意味着,为了满足系 统设计者所做的一些限制,应用程序组件能够在系统配置期间被映射到任何有效的
ECU 上。RTE 负责确保这些组件能够通信。
RTE 和 OS,AUTOSAR COM 和其他的基础软件模块(BSW)是 VFB(Virtual
Functional Bus)概念的实现。RTE 实现了 AUTOSAR VFB 的接口,从而实现了
AUTOSAR 软件组件 之间的通信。
RTE 是 AUTOSAR ECU 体系的核心,它提供了在 AUTOSAR 软件组件间通信的基础服
务,扮演了一些方法,通过这些方法 AUROSAR 软件组件能访问包括 OS 和通信服务在内 基础软件模块的。
系统服务
系统服务是一组可以由所有层次模块使用的模块和功能。例如实时操作系统、错误管理 器和库功能。为应用和基本软件模块提供基本服务。它包下图所示功能:
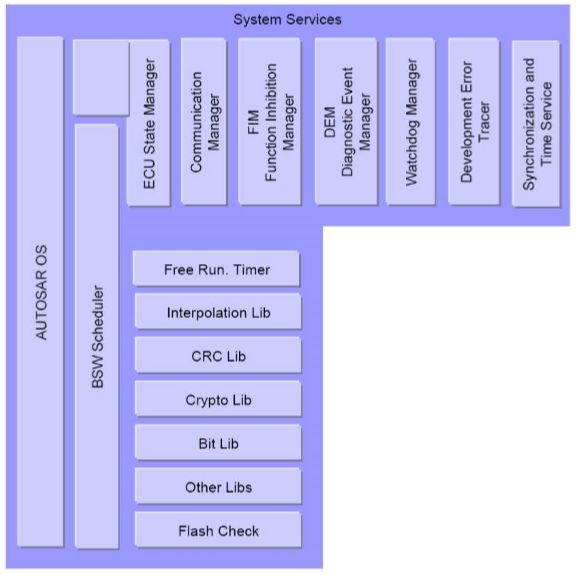
1. AUTOSAR OS
AUTOSAR OS 为实时应用提供了所有基本服务,即中断处理、调度、系统时间和时钟 同步、本地消息处理,以及错误检测机制。所有服务都隐藏在良好定义的
API 之后。应用 与 OS 和通信层的连接只通过 API。
AUTOSAR OS 的基本特征包括:
· 静态配置
· 能够推断实时系统性能
· 提供基于优先级的调度策略
· 提供运行时保护功能(存储、计时等)
· 可宿主在低端控制器上,并且不需要其他资源
它包以下几个方面:
·实时操作系统
在嵌入式汽车 ECU 中的实时操作系统构成软件动态行为的基础。它管理任务和事 件的调度,不同任务间的数据流,并且提供监控和错误处理功能。
但是,在汽车系统中,对操作系统的需求集中在特定领域。所使用的操作系统必须 高效运行并且所占存储空间小。
在多媒体和远程信息处理应用中,操作系统提供的特征集以及可用计算资源有很大 不同。在纯粹的任务管理之上,OS
中还包了复杂的数据处理(例如,流、快速文件 系统等)、存储管理甚至图形用户接口。
汽车 OS 的典型领域涵盖了调度和同步的核心特征。在 AUTOSAR 中,上面讨论 的附加特征在
OS 的范围之外,其他 WP4.2.2.1 工作包(例如 SPAL)涵盖了这些特征。在 AUTOSAR
的体系结构约束之下不可能把其他 OS(例如,QNX、VxWorks 和 Windows CE 等)的特征集合集成到整体的
OS/通信/驱动结构中。因此,AUTOSAR OS 只考虑核心特征。
·核心操作系统
OSEK/VDK 操作系统广泛应用于汽车工业,并且已经证明了可以在现代车辆的所 有 ECU 类型中使用。OSEK
OS 引入的概念被广泛地理解,汽车工业领域在设计基于 OSEK OS 的系统方面有多年的经验。
OSEK OS 是一个事件触发的操作系统。这为基于 AUTOSAR 的系统的设计和维 护提供了高度的灵活性。事件触发使得可以自由地选择在运行时驱动调度的事件,例如
角反转、局部时间源、全局时间源、错误出现等等。
由于这些原因,AUTOSAR OS 的核心功能必须基于 OSEK OS。OSEK OS 特 提供了以下特性以支持
AUTOSAR:
·固定的基于优先级调度
·处理中断的功能
·只有中断有高于任务的优先级
·一些防止错误使用 OS 服务的保护措施
·StartOS和 StartupHook 启动接口
·ShutdownOS和 ShutdownHook 关闭接
AUTOSAR OS 基于 OSEK OS 意味着应用程序是向后兼容的。为 OSEK OS 编写
的应用程序可以在 AUTOSAR OS 上运行。但是,使用 AUTOSAR OS 引入的一些新 特性需要对已存在的
OSEK OS 特性的使用有所限制。例如:为定时器回调实现定时和 内存保护效率就会很低。此外,AUTOSAR
OS 扩展了一些已存在的特性,例如直接通 过定时器驱动计数器。
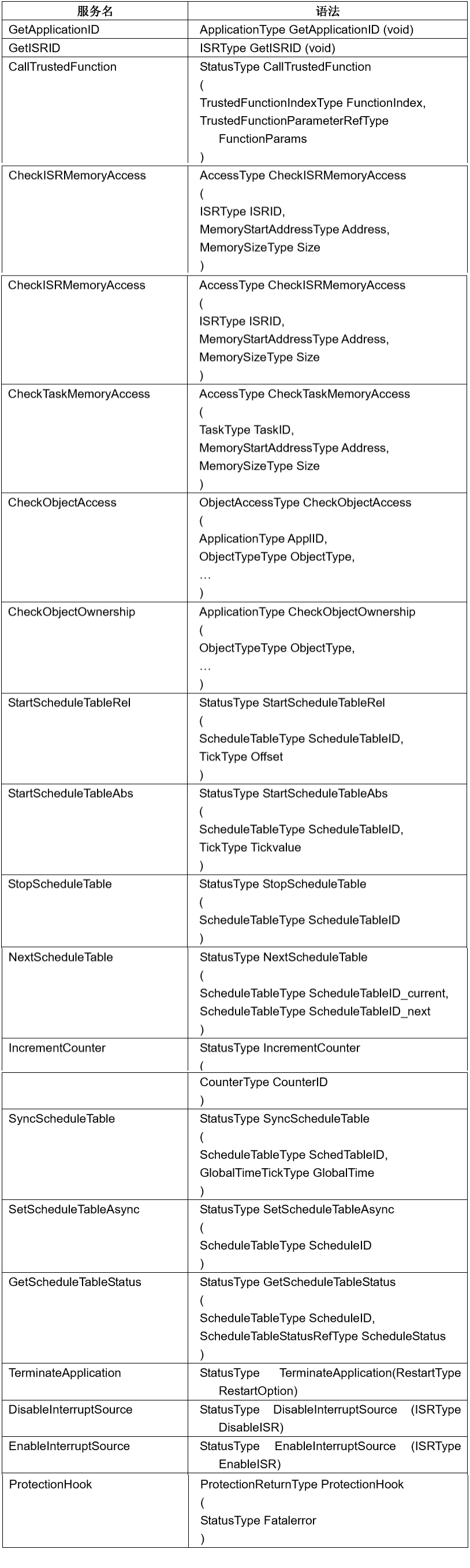
AUTOSAR OS 提供的 API 向后兼容于 OSEK OS 的 API。新的需求作为功能扩展
来集成。
AUTOSAR OS 对 OSEK OS 扩展的 API 如下表
·静态定以的调度
在许多应用中需要静态定义一组互相关联的任务的活动。这用于在基于数据流的设 计中保证数据一致性,与时间触发的网络同步,保证正确的运行时定相,等等。
时间触发的操作系统通常作为这个问题的解决方法。然而,时间只是简单的事件, 所以任何事件触发的 OS,包括
OSEK OS,会在汽车电子控制单元实现一个用于静态 调度实时软件的调度器。
·监控功能
监控功能在适当的执行阶段检测错误,不是在错误发生的时刻。因此,监控功能是 在运行时捕捉失效,而不是预防故障。
·计时器服务
计时器服务为应用和基础软件提供软件计时器。
计时机制的核心已经由 OSEK OS 的计数器和闹钟提供。如果要提供通用的软件计 时,一些补充特性需要添加到
AUTOSAR OS。
·时间触发操作系统
时间触发操作系统在汽车电子控制单元实现了一个用于静态调度实时软件的调度 器。
另外,操作系统为实时应用提供了所有基本服务,即中断处理、调度、系统时间和 时钟同步、本地消息处理,以及错误检测机制。
所有服务都隐藏在良好定义的 API 之后。应用与 OS 和通信层的连接只通过 API。
对于特殊的应用,操作系统能够配置为只包该应用需要的服务。因此操作系统的 资源需求尽量少。
2. BSW 调度器
BSW 调度器是系统服务的一部分,因此它向所有层次的所有模块提供服务。但是,与其它BSW模块不同,BSW
调度器提供了集成的概念和服务。BS 调度器提供方法用以:
· 把 BSW 模块的实现嵌入AUTOSAR OS上下文
· 触发 BSW 模块的主要处理功能
· 应用 BSW 模块的数据一致性机制
集成者的任务是应用 应用 应用 应用所给的方法(AUTOSAR OS 提供的),在特定项目环境中以良好
定义和有效的方式把 BSW 模块装配起来。
这也意味着 BSW 调度器只是使用AUTOSAR OS。它与 AUTOSAR OS调度器并不冲突。
BSW 调度器的实现基于:
· BSW 模块的 BSW 模块描述
· BSW 调度器的配置
3. 模式管理
模式管理簇包括三个基本软件模块:
· ECU 状态管理器,控制 AUTOSAR BSW 模块的启动阶段,包括 OS 的启动;
· 通信管理器,负责网络资源管理;
· 看门狗管理器,基于应用软件的生存状态触发看门狗。
关于ECU 状态管理器
ECU 状态管理器是一个基本软件模块,管理 ECU 的状态(OFF、RUN、SLEEP),以 及这些状态之间的转换(过渡状态:STARTUP、WAKEUP、SHUTDOWN)。详细地,ECU
状态管理器:
· 负责初始化和 de-initialization 所有基本软件模块,包括 OS 和 RTE;
· 在需要时与所谓的资源管理器(例如,通信管理器)协作,关闭 ECU;
· 管理所有唤醒事件,并在被要求时配置 ECU 为 SLEEP 状态。
为了完成所有这些任务,ECU 状态管理器提供了一些重要的协议:
· RUN 请求协议,调整 ECU 是保持活动状态还是准备关闭;
· 唤醒确认协议,从“不稳定的”唤醒事件中区分出“真正的”唤醒事件;
· 时间触发的增多非工作状态协议(Time Triggered Increased Inoperation
- TTII), 允许 ECU 更多地进入节能的休眠状态。
ECU 状态管理器必须支持独立的预处理动作和过渡,以启动 ECU 或将其转换到低功耗 状态(例如,休眠状态/备用状态)。通过良好使用
ECU 状态管理器的特性和能力,此模块 能够用于执行电源消耗的预定义策略,因此提供了对 ECU 的有效能源管理。
ECU 状态管理器的特性和优势包括:
· 初始化和关闭基本软件模块;
· ECU 主要状态的标准化定义;
· 时间触发的更多非工作状态。
关于看门狗管理器
看门狗管理器是 AUTOSAR(服务层次)的标准化基本软件体系结构的基本软件模块。它监控与计时约束有关的应用执行的可靠性。
分层体系结构方法使得应用计时约束和看门狗硬件计时约束分离。基于此,看门狗管理 器在触发看门狗硬件的同时提供了对一些独立应用的生存监控。
看门狗管理器提供以下特性:
· 监督多个处于 ECU 的单独应用,这些应用有独立的计时约束并且需要特监督运 行时的行为和生存状态;
· 每个独立的受监控实体都有故障响应机制;
· 可以关闭对单独应用的监督,而不会违反看门狗触发(例如,对于禁止的应用);
· 通过看门狗驱动触发内部或外部、标准或窗口,看门狗。(internal or external,
standard or window, watchdog)对内部或外部看门狗的访问由看门狗接口处理;
· 根据 ECU 状态和硬件性能选择看门狗模式(Off Mode, Slow Mode, Fast
Mode)。
关于通信管理器
通信管理器收集并协调来自通信请求者(用户)的访问请求。
通信管理器的目的是:
· 简化通信协议栈的使用。包括通信栈的初始化,以及简单的网络管理;
· 调整 ECU 上多个独立软件组件的通信栈(允许发送和接收消息)的可用性;
· 暂时禁止发送消息以阻止 ECU(主动地)唤醒物理通道;
· 可以关闭对单独应用的监督,而不会违反看门狗触发(例如,对于禁止的应用);
· 通过为每个物理通道实现一个状态机来控制 ECU 的多个物理通道;
· 可以强制 ECU 保持物理通道处于“silent 通信”模式;
· 分配所请求的通信模式需要的所有资源,简化资源管理。
通信管理器定义了“通信模式”,表示一个特定的物理通道对于应用是否可用,以及如 何使用(发送/接收,只接收,即不发送也不接收)。
诊断服务
1. 诊断事件管理器
诊断事件管理器 DEM(Diagnostic Event Manager)是一个子组件,如同 AUTOSAR
内诊断模块的诊断通信管理器(DCM)和功能禁止管理器(FIM)。它负责处理和存储诊断 事件(错误)和相关
FreezeFrame 数据。DEM 进一步提供故障信息给 DCM(例如,从事 件存储器读取所有存储的
DTC(Diagnostic Trouble Code))。DEM 给应用层、DCM 和 FIM 提供接口。定义了可选的过滤服务。
2. 功能禁止管理器
功能禁止管理器 FIM(Function Inhibition Manager)负责提供软件组件和软件组件功
能的控制机制。功能由一个、多个或部分有相同权限/禁止条件的可执行实体构成。通过 FIM 方法,对这些功能的禁止可以配置甚至修改。所以,极大地提高了功能在新系统环境下的适应性。
FIM 意义上的功能与可执行实体是不同并且独立的类型。可执行实体主要由调度需求来 区分。与此相对的是,功能由禁止条件来分类。FIM
服务关注 SW-C 的功能,但是并不局 限于此。BSW 的功能也能够使用 FIM 服务。
功能被指定了一个标识符(FID – function identifier),以及该特定标识符的禁止条件。功能在执行之前获得它们各自的权限状态。如果禁止条件应用于特定标识符,对应的功能将
不再执行。
FIM 与 DEM 密切相关,因为诊断事件和它们的状态信息作为禁止条件被提供给 FIM。如果检测到了失效,并且事件报告给了
DEM,那么 FIM 禁止 FID 和对应的功能。
为了处理功能和关联事件的关系,功能的标识符和禁止条件必须引入到 SW-C 模板中 (与 BSW 等价),并且在配置期间构造数据结构以处理标识符对于特定事件的敏感性。这
些关系在每个 FIM 中是唯一的。
RTE 和 FIM 之间没有功能上的联系。在 AUTOSAR 中,RTE 按照接口和调度需求处理
SW-C。与此相对的是,FIM 处理禁止条件并通过标识符(FID)为控制功能提供支持机制。因此,FIM
概念和 RTE 概念不互相干扰。
3. 开发错误跟踪器
开发错误跟踪器 DET(Development Error Tracer)主要用于在开发期间跟踪和记录错
误。API 参数给出了追踪源和错误类型:
· 错误所在的模块
· 错误所在的功能
· 错误类型
由软件开发者和软件集成者在特定应用和测试环境下为 API 功能选择最优的策略。可能包括以下功能:
· 在错误报告API内设置调试器断点;
· 计算报告的错误
· 在 RAM 缓存中记录调用和传递的参数;
· 通过通信接口发送报告的错误到外部日志。
DET 仅仅是对 SW 开发和集成的辅助,并不一定要包在产品代码中。API 已经定义, 但是功能由开发者根据特定需求来选择/实现。
4. 开发错误跟踪器
诊断通信管理器DCM(Diagnostic Communication Manager)确保诊断数据流,并且
管理诊断状态,特是诊断对话期和安全状态。另外,DCM检查诊断服务请求是否被支持, 以及根据诊断状态判断服务是否可以在当前对话期中执行。
DCM 为所有诊断服务提供连接到 AUTOSAR-RTE 的接口。另外 DCM 也处理一些基本诊断
服务。
在 AUTOSAR 体系结构中,诊断通信管理器(DCM)处在通信服务中(服务层)。DCM 是应用和
PDU 路由器封装的车辆网络通信(CAN、LIN、FlexRay 和 MOST)之间的中间 层。DCM
与 PDU 路由器之间有一个接口。在通信过程中,DCM 从 PDU(Protocol Data Unit)
路由器接收诊断消息。
DCM 在其内部处理、检查诊断消息,并把消息传送到 AUTOSAR SW 组件进一步处理。根据诊断服务
ID,将执行应用层中的相应调用。
DCM 必须是网络无关的,所以协议和消息配置在 DCM 的下层。这需要连接到 PDU 路 由器的网络无关接口。
DCM 由以下功能块组成:
DSP - Diagnostic Service Processing
DSP 主要包了完整实现的诊断服务,这些服务在不同的应用之中是通用的(例如, 访问故障数据),所以不需要由应用实现。
DSD-Diagnostic Service Dispatcher
DSD 的目的是处理诊断数据流。这里的处理意味着:1. 通过网络接收新的诊断请求并发送到数据处理器;2.当被应用触发时,通过网络传送诊断响应(AUTOSAR
SW-Component或DSP)。
DSL-Diagnostic Session Layer
DSL 保证数据流与诊断请求和响应有关。DSL 也监督和确保诊断协议计时。进一步, DSL 管理诊断状态。
5. 存储栈
1) 存储服务
存储服务由一个 NVRAM 管理器模块构成,负责管理非易失性数据(从不同存储驱动 读/写)。它需要一个
RAM 镜像作为数据接口提供给应用快速读取。
存储服务的任务是以统一方式向应用提供非易失性数据。这抽象了存储位置和属性。提 供非易失性数据管理机制,如保存、加载、校验和保护和验证、可靠存储等。
关于存储硬件抽象的寻址方案
存储抽象接口和下层的闪存 EEPROM 仿真和 EEPROM 抽象层向 NVRAM 管理器提供 虚拟线性
32 位地址空间。这些逻辑 32 位地址由 16 位逻辑块号和 16 位块地址偏移量组成。因此 NVRAM
管理器(理论上)可以有 65536 个逻辑块,每个逻辑块(理论上)可以有 64Kbytes。
NVRAM 管理器进一步将 16 位逻辑块号划分为以下部分:
· (16-NVM_DATASET_SELECTION_BITS)位的块标识符;
· NVM_DATASET_SELECTION_BITS 位的数据索引,每个 NVRAM 块最多可以有
256 个数据集。
关于NVRAM 管理器
非易失性 RAM 管理器(NVRAM Manager)管理所有非易失性存储器中数据的存储。
NVRAM 管理器本身与硬件无关,所有直接存取硬件的功能,例如内部或外部 EEPROM、内部或外部闪存中的仿真
EEPROM 等,封装在基本 SW 的较低层。在汽车环 境中,NVRAM 管理器提供服务以根据各个数据的需求来保证数据存储和
NV 数据的维护。NVRAM管理器要能够管理EEPROM和/或FLASH EEPROM仿真设备的NV数据。NVRAM
管理器为 NV 数据的管理和维护提供所需的同步/异步服务(初始化/读/写/控制)。NVRAM 管理器处理对非易失性数据的并行访问,并为单个数据元素提供可靠性机制,如校验和保护。
为了适用于汽车系统的所有领域,NVRAM 管理器需要具有高度的伸缩性(如定义请求队列 的数目和大小,支持不同的块管理类型,EEPROM
仿真,等等)。
关于基本储存对象
NV块:NV块表示NV用户数据和CRC值(可选)组成的存储区;
RAM块:RAM块表示在RAM中用户数据和CRC值(可选)组成的区域;
ROM块:ROM块驻留在ROM(闪存)中,用于提供缺省数据以防NV块为空或被破坏;
管理块:管理块在 RAM 中,包与 Dataset NV 块关联的块索引。另外,也包相应 NVRAM
块的属性/错误/状态信息。
关于管理块类型
以下 NVRAM 存储类型应该由 NVRAM 管理器支持,并且由以下基本存储对象构成:
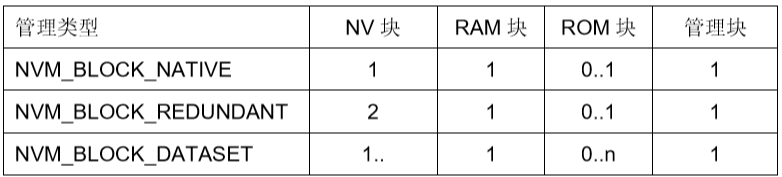
Native NVRAM 块是最简单的块管理类型。以最小的开销存储/检索 NV 存储区。Native
NVRAM 块由单个 NV 块、RAM 块和管理块组成。
Redundant NVRAM块有更高的容错性、可靠性和可用性,以及对数据被破坏的抵抗性。Redundant
NVRAM块由两个NV块、一个RAM块和管理块组成。
Dataset NVRAM 块是相同大小数据块(NV/RAM)的阵列。应用一次只能存取其中的 一个。Dataset
NVRAM 块由多个 NV 用户数据和(可选)CRC 区域、一个 RAM 块和管理块组成。
关于NVRAM管理器的API配置种类
为了使NVRAM管理器适合于有限的硬件资源,定义了3种不同的API配置种类:
· API 配置种类 3:所有规定的API调用都可用。支持最大的功能性。
· API 配置种类 2:API调用的中间集可用。
· API 配置种类 1:特用于满足资源非常有限的系统,此 API 配置种类只提供所需要的 API
调用的最小集。
2)储存硬件抽象
存储硬件抽象是一组抽象于外围存储设备位置(片上或板上)和 ECU 硬件布局的模块。例如:片上 EEPROM
和外部 EEPROM 设备应该可以通过相同的机制存取。
通过存储器特有抽象/仿真模块访问存储驱动(例如 EEPROM 抽象)。通过仿真 EEPROM 接口和闪存硬件单元,就可以通过存储抽象接口访问这两种类型的硬件。
存储硬件抽象的任务是提供访问内部(片上)和外部(板上)存储设备和存储硬件类型 (EEPROM、闪存)的相同机制。
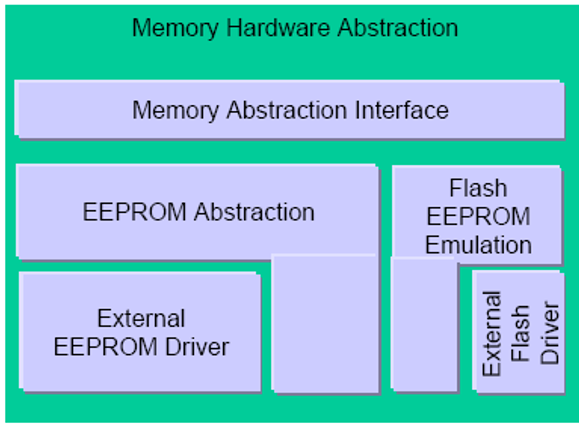
关于EEPROM抽象
EEPROM 抽象层(EA)扩展 EEPROM 驱动,向上层提供线性地址空间上的虚拟分段 和“实际上无限制的”擦除/写循环。除此之外,它还应该提供与
EEPROM 驱动相同的功能。
关于EEPROM仿真
闪存 EEPROM 仿真(FEE)按照闪存技术仿真 EEPROM 抽象层的行为。所以它与 EEPROM
抽象层有相同的功能和 API,并且给出基于下层闪存驱动和闪存设备的相似配置。
关于内存抽象接口
内存抽象接口(MemIf)允许 NVRAM 管理器存取多个存储抽象模块(FEE 或 EA 模块)。
内存抽象接口抽象于下层 FEE 和 EA 模块的数目,并向上层提供统一线性地址空间上 的虚拟分段。
3)储存驱动
关于EEPROM驱动
EEPROM 驱动提供读、写、擦除 EEPROM 的服务。也提供了用于比较 EEPROM 中 数据块和内存中数据块的服务。这些服务是异步的。有两类
EEPROM 驱动:
· 内部EEPROM驱动
· 内部EEPROM驱动
内部 EEPROM 驱动直接访问微控制器硬件,并且定位在微控制器抽象层。外部 EEPROM 驱动使用处理程序(handler)或驱动访问外部
EEPROM 设备。它定位在 ECU 抽象层。
两种类型的驱动的功能需求和功能范围都是相同的。所以 API 在语义上是相同的。
关于闪存驱动
如果受到底层硬件的支持,闪存驱动提供读、写和擦除闪存的服务,以及设置写/擦除 保护的配置接口。闪存驱动提供了一个内置加载器,以加载闪存存取代码到
RAM 中,并在 需要的时候执行写/擦除操作。
在 ECU 应用模式下,闪存驱动只用于闪存 EEPROM 仿真模块写数据。在应用模式下 并不将程序代码写到闪存中。这应该由启动模式处理,超出了
AUTOSAR 的范围。
有两类闪存驱动:
· 内部闪存驱动
· 内部闪存驱动
内部闪存的驱动直接存取微控制器硬件,并且定位在微控制器抽象层。外部闪存通常通 过微控制器数据/地址总线连接,然后闪存驱动使用总线的处理程序/驱动访问外部闪存设
备。外部闪存设备的驱动定位在 ECU 抽象层。两种类型的驱动的功能需求和功能范围都是 相同的。所以
API 在语义上是相同的。
6. 通信栈
AUTOSAR 通信栈的概貌如下图:
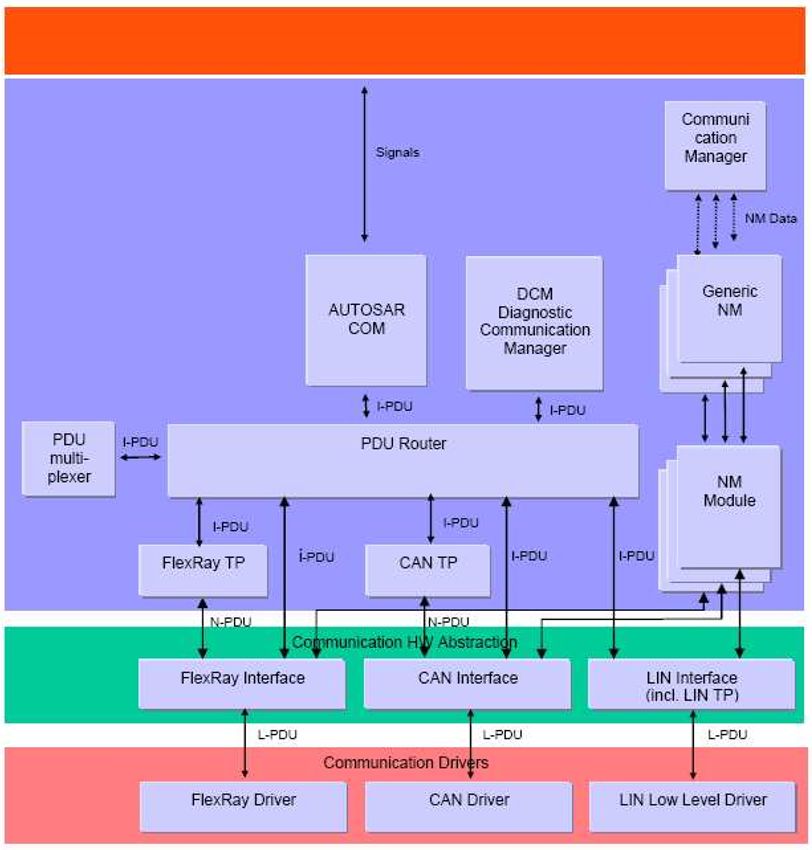
AUTOSAR 中的通信栈包以下这些部分:
1)CAN
· AUTOSAR CAN
AUTOSAR CAN 模型如下图:

· CAN驱动
CAN 驱动为上层使用者提供统一的接口——CAN 接口。CAN 驱动尽可能合理地隐藏 了相关 CAN
控制器的硬件专用性。
CAN 驱动是最底层的一部分,为上层执行对硬件的访问和提供硬件无关的 API。上层 中唯一能够访问
CAN 驱动的是 CAN 接口。
如果几个 CAN 控制器属于相同的 CAN 硬件单元,那么它们能够由 CAN 驱动来控制。
一个 CAN 控制器总是与一个物理通道相关联。它被允许与总线上的物理通道相连接, 不管 CAN 接口是否将相关的
CAN 控制器分对待。
· CAN接口(硬件抽象)
CAN 接口提供标准化的接口,通过 ECU 的 CAN 总线系统来支持通信。其 API 与专用 CAN
控制器及其通过 CAN 驱动层的访问无关。CAN 接口能够通过统一的接口访问一个或 多个 CAN 驱动。
CAN 接口仅能用于 CAN 通信,并且是为操作一个或多个底层 CAN 驱动而专门设计。涵盖不同
CAN 硬件单元的几个 CAN 驱动模块由一个在 CAN 驱动规范中指定的通用接口来 表示。CAN
之外(也就是 LIN)的其他协议不支持。
· CAN传输层
CAN 传输层是位于 PDU 路由和 CAN 接口模块之间的模块。其主要作用是分割和合并 大于 8
字节的 CAN I-PDU。
根据 AUTOSAR 基本软件体系结构,CAN 传输层提供的服务有:
· 发送方向的数据分割;
· 接收方向的数据合并;
· 数据流控制;
· 分割期间内的错误检测;
AUTOSAR 体系结构定义了通信系统的各个具体的传输层 (CanTp、包 LinIf 的 LinTp、
FlexRayTp)。因此,CAN 传输层仅涵盖了 CAN 传输协议的细节。
CAN 传输层拥有一个接口,该接口连接一个单独的下层 CAN 接口层和一个单独的上层 PDU Router
模块。
根据 AUTOSAR 发布的计划,该 CAN 传输层规范包下面的限制:
· CAN传输层仅运行在事件触发模式中;
· 没有传送/接收撤销;
· CAN传收发器驱动
CAN 收发器驱动负责处理 ECU 上的 CAN 收发器,依据的是与整个 ECU 当前状态相 关的总线专用
NM 的状态。
CAN 收发设备驱动的目标:CAN 收发设备驱动抽象使用 CAN 收发设备硬件芯片。它 向更高层提供硬件无关接口。它也可以通过
MCAL 层的 API 从 ECU 设计中抽象出来,访问 CAN 收发设备硬件。
CAN 收发设备硬件必须提供功能和接口,以映射到 AUTOSAR CAN 收发设备驱动的 运行模式模型上。
下层驱动(SPI 和 DIO)使用的 API 必须同步。不支持同步行为的下层驱动的实现不能 与 CAN
收发设备驱动一起使用。
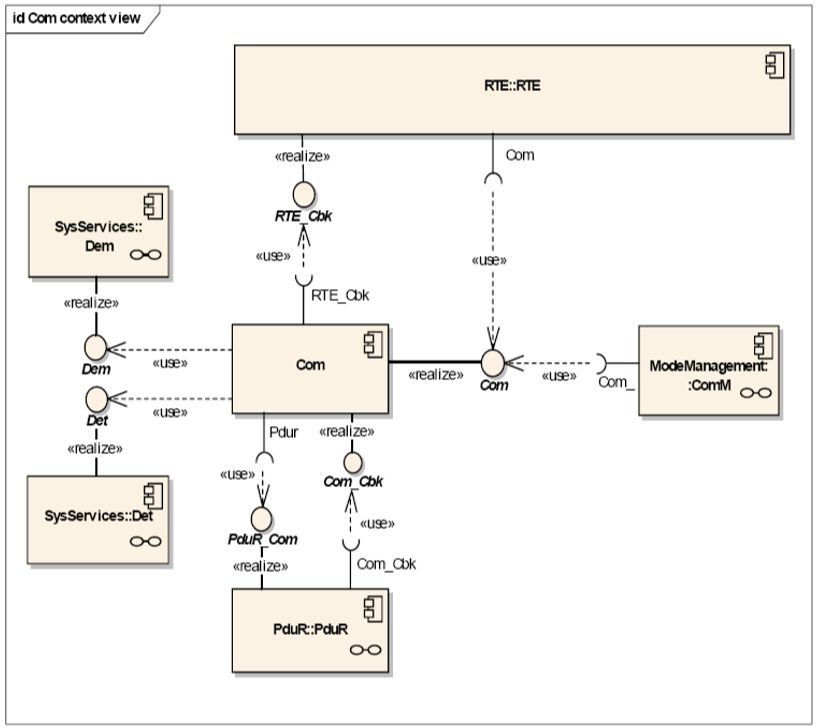
2) COM
· AUTOSAR COM
AUTOSAR COM 层位于 RTE 和 PDU 路由器之间。它来源于 OSEK_COM 标准。AUTOSAR
COM 提供了信号网关功能。
COM 与其它模块的依赖关系如下图所示:
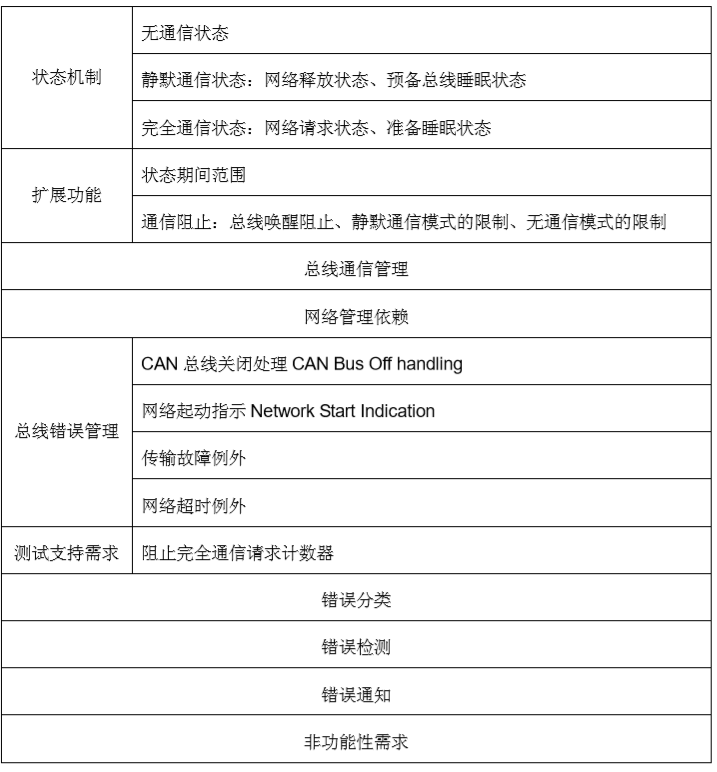
· COM Manager
COM Manager(COM 管理)是基本软件 Basic Software(BSW)的一个组件。它是
囊括了下层通信服务的控制的资源管理。
COM Manager 控制的基本软件模块(BSW)与通信相关,而不是与软件组件或可运 行实体相关。
COM Manager 从通信请求者那里收集总线通信访问请求,并协调总线通信访问请求。
COM Manager 的目标是:
· 为用户简化总线通信栈的使用。这包括了总线通信栈的初始化和简化的网络管理处理;
· 协调与多个软件组件(在一个 ECU 上)无关的总线通信栈(允许信号的发送和 接收)的可用性;
· 临时性取消信号的发送以阻止 ECU 唤醒通信总线;
· 控制 ECU 的一个以上的通信总线通道,这通过为每个通道实现一种状态机制来实现;
· 提供使 ECU 保持总线处于“静默通信”模式;
· 通过分配对请求通信模式必需的所有资源来简化资源管理。
COM Manager 包以下基本功能:
· AUTOSAR COM与OSEK COM的比较
根据通信部分提供的功能,对比两者在相同功能上的API,以及两者各自所特有的API,由于AUTOSAR
COM较之OSEK COM,多出了一个COM Manager,即通信管理模块部分,所以整个AUTOSAR
COM Manager为AUTOSAR标准所特有,下面先对两者的相同功能部分作比较。
在相同功能及服务的情况下:
(1)启动与控制服务
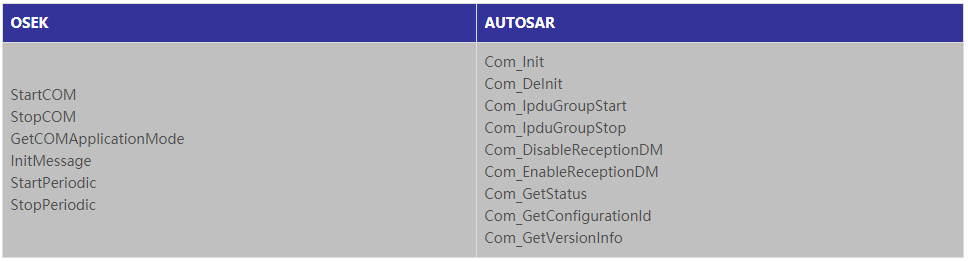
两者在通信的启动与控制服务部分的对比可以看出:首先,AUTOSAR提供的API较多,表明它的功能较强;其次,AUTOSAR的启动与控制服务中包含对I-PDU(交互层协议数据单元)的处理和控制,如Com_IpduGroupStart、Com_IpduGroupStop。
(2)通信服务
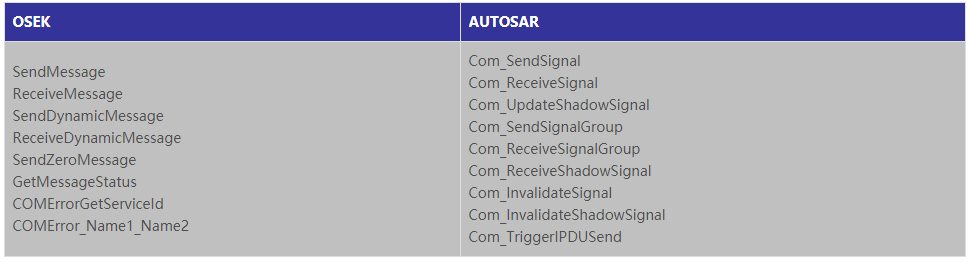
通过对比可以看出,OSEK通信服务中包含了对错误的一些简单的处理,如获得错误服务的Id(COMErrorGetServiceId),而AUTOSAR通信服务仍然包含对I-PDU的处理,如Com_TriggerIPDUSend。
(3)通知机制支持服务(OSEK)与回调通知服务(AUTOSAR)

两者在这个部分提供的功能差别不大,主要是对一些标志的修改和设置,以控制通信的状态和执行的功能。
在不同功能及服务的情况下:
(1)OSEK为I-PDU的处理提供一类专门的服务,称为OSEK间接网络管理接口,包含2个API:I-PDU传输指示(I_MessageTransfer)和I-PDU超时指示(I_MessageTimeOut)。
(2)OSEK通信部分提供了一些例行程序对通信起扩展作用,包含3个API:StartCOMExtension、COMCallouts、COMErrorHook。
(3)AUTOSAR提供了一些调度函数,主要是对消息或信号的接收或发送起路由、调度的作用,包含3个API:Com_MainFunctionRx、Com_MainFunctionTx、Com_MainFunctionRouteSignals。
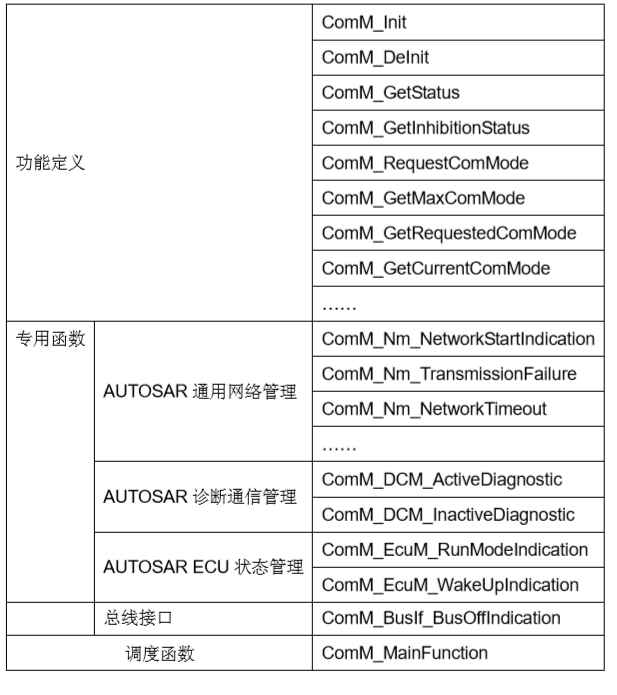
(4)AUTOSAR的通信部分有一个COM Manager,这是一个通信管理模块,是AUTOSAR标准特有的,主要负责对通信进行监控、管理、诊断以及管理涉及通信的ECU状态。下表列出了它所提供的部分API。
3) FlexRay
· AUTOSAR FlexRay
AUTOSAR FlexRay 的分层体系结构如下图所示:
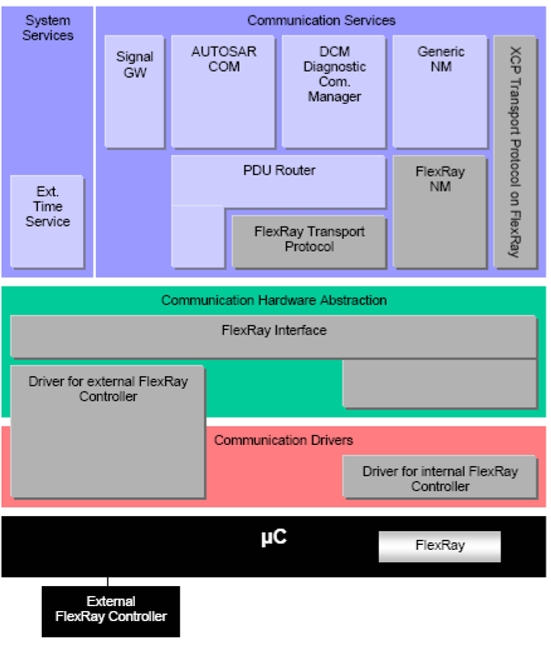
· FlexRay 接口
FlexRay 接口提供一种标准化的接口以访问 FlexRay 通信系统/硬件。FlexRay 接口必
须与所使用的专用 FlexRay CC 及其通过 FlexRay 驱动的访问无关。FlexRay 接口提供通过
统一接口的对一个或几个 FlexRay 驱动的访问。
FlexRay 接口的主要任务有:
· 为上层提供到 FlexRay 通信系统的抽象接口;
· FlexRay 接口通过一个或多个硬件专用驱动模块来访问 FlexRay 硬件,而不是直接访问;
· 为了访问 FlexRay 通信控制器,FlexRay 接口使用一个或多个 FlexRay 驱动模块;
· 为了访问 FlexRay 收发器,FlexRay 接口使用一个或多个 FlexRay 收发器驱动模块;
· FlexRay 接口允许代码模块的对象代码提交,遵循“one-fits-all”原则;
· FlexRay 接口提供给上层 AUTOSAR BSW 模块的功能如下:
a.初始化
b.配置/重配置
c.数据传送(发送和接收)
d.启动/停止/中断通信
e.FlexRay 专用服务
f.设置运行模式
g.获取状态信息
h.各种计时器功能
· FlexRay 驱动
FlexRay 驱动模块必须为 FlexRay 接口模块、API 的使用者提供统一接口,以访问许多
FlexRay 通信控制器,这些控制器通常是相同类型的。FlexRay 驱动是一个软件层,它将抽 象功能请求映射到
CC 专用硬件的序列上。CC 的硬件实现将从 FlexRay 接口隐藏。
· FlexRay 传输层
FlexRay 传输层为使用物理地址和功能地址的、分段式的确认过的和未确认过的 1 对 1 通信,以及分段式的未确认过的
1 对 n 通信提供支持。
· FlexRay 收发器驱动
FlexRay 收发器驱动负责处理 ECU 上的 FlexRay 收发器,其依据是总线专用 NM
的状态。
4)IPDUM
PDU 多路技术是指通过其 SDU(Service Data Unit)的一个以上的特定设计来使用一个PDU(Protocol
Data Unit)的相同PCI(Protocol Control Information)。选择子字段是多路PDU的SDU的一部分。它用于区多路PDU之间的内容。
5)LIN
· AUTOSAR LIN
AUTOSAR LIN 的分层体系结构如下图所示:
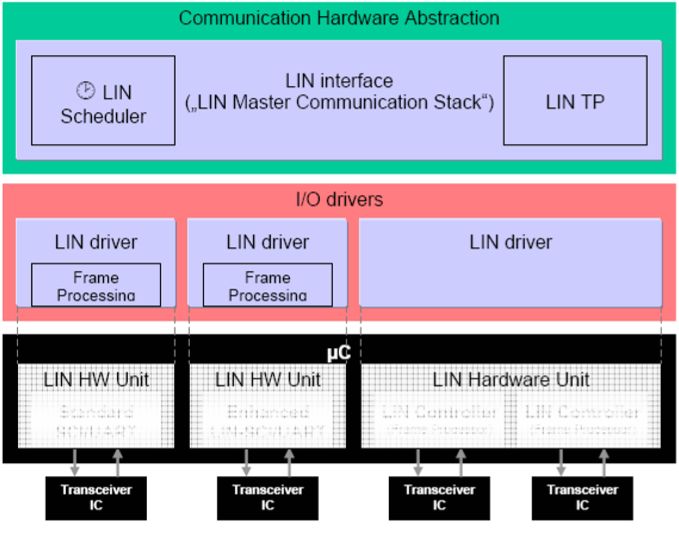
· LIN 驱动
LIN 驱动是最底层的一部分,执行硬件访问和为上层提供硬件无关的 API。上层唯一能够访问到 LIN
驱动的就是 LIN 接口。
一个 LIN 驱动能够支持一个以上的通道。LIN 驱动能够处理一个或多个属于相同 LIN 硬件单元的
LIN 通道。
· LIN 接口
LIN 接口被设计成硬件无关的。到上层模块(PDU 路由器)和下层模块(LIN 驱动)的 接口被很好地定义。
LIN 接口可以处理一个以上的 LIN 驱动。一个 LIN 驱动能够支持一个以上的通道。这指的是
LIN 驱动能够处理一个或多个 LIN 通道。
LIN 接口负责向上层提供 LIN 2.0 主要功能有:
· 为每个与 ECU 连接的 LIN 总线执行当前选择的调度;
· 当上层请求到来时,切换调度表;
· 从上层接收帧的传送,并传送数据部分作为适当 LIN 帧中的响应;
· 当相应的响应在适当的帧中接收时,为上层提供帧接收通知;
· 错误处理 ;
· 诊断传输层服务 ;
结束语
下篇,我们将讲到AUTOSAR的外设以及AUTOSAR方法、模型、工具和一致性测试 |