| БрМЭЦМі: |
| БОЮФРДздгкcsdnЃЌБОЮФжївЊНщЩмДгЭгТнвЧЁЂМгЫйЖШМЦЁЂДХСІМЦвдМАФкВПЮТЖШДЋИаЦїЕУЕНЕФЪ§ОнЃЌШЋВПБЛДЋЪфЕНЧЖШыЪНЯЕЭГ-MCUжа,ЯЃЭћЖдФњЕФбЇЯАгаЫљАяжњЁЃ |
|
ДЋИаЦїЕФдРэ
МгЫйЖШМЦЃК
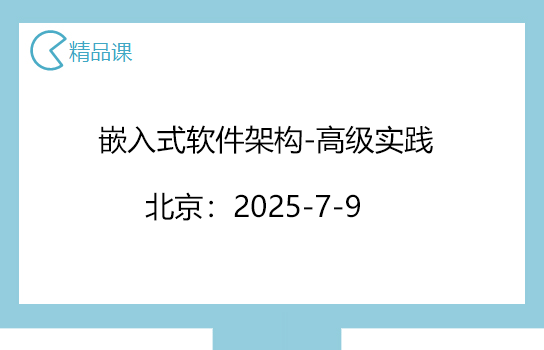
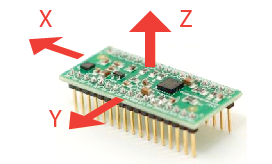
МгЫйЖШМЦ---ЮвУЧПЩвдАбЫќЯызївЛИідВЧђдквЛИіЗНКазгжаЁЃ
МйЖЈетИіКазгВЛдкжиСІГЁжаЛђепЦфЫћШЮКЮЛсгАЯьЧђЕФЮЛжУЕФГЁжаЃЌЧђДІгкКазгЕФе§жабыЁЃ
ФуПЩвдЯыЯѓКазгдкЭтЬЋПежаЃЌЛђдЖдкКНЬьЗЩЛњжаЃЌРыШЮКЮЬьЬхЃЌвЛЧаЖЋЮїЖМДІгкЮожиСІзДЬЌЁЃ
дкЭМжаФуПЩвдПДЕНЮвУЧИјУПИіжсЗжХфСЫвЛЖдЧНЃЈЮвУЧвЦГ§СЫY+вдДЫРДЙлВьРяУцЕФЧщПіЃЉЁЃ
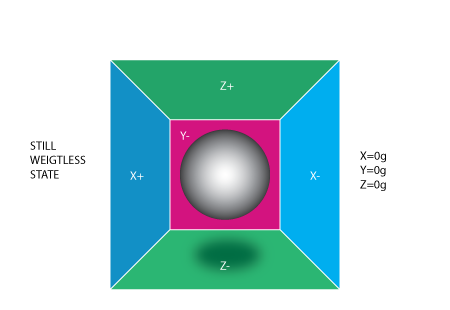
ЩшЯыУПУцЧНЖМФмИаВтбЙСІЁЃШчЙћЮвУЧЭЛШЛАбКазгЯђзѓвЦЖЏЃЈМгЫйЖШЮЊ1g=9.8m/s^2ЃЉЃЌФЧУДЧђЛсзВЩЯX-ЧНЁЃ
ШЛКѓЮвУЧМьВтЧђзВЛїЧНУцВњЩњЕФбЙСІЃЌXжсЪфГіжЕЮЊ-1gЁЃ
МгЫйЖШМЦМьВтЕНСІЕФЗНЯђгыЫќБОЩэМгЫйЖШЕФЗНЯђЪЧЯрЗДЕФЁЃетжжСІСПЭЈГЃБЛГЦЮЊЙпадСІЁЃ
дкетИіФЃаЭжаЃЌМгЫйЖШМЦЪЧЭЈЙ§МфНгВтСПСІЖдвЛИіЧНУцЕФзїгУРДВтСПМгЫйЖШЕФЃЌдкЪЕМЪгІгУжаЃЌПЩФмЭЈЙ§ЕЏЛЩЕШзАжУРДВтСПСІЁЃ
етИіСІПЩвдЪЧМгЫйЖШв§Ц№ЕФЃЌвВВЛвЛЖЈЪЧМгЫйЖШв§Ц№ЕФЁЃ
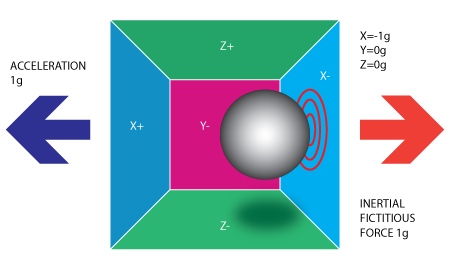
ШчЙћАбФЃаЭЗХдкЕиЧђЩЯЃЌЧђЛсТфдкZ-ЧНУцЩЯВЂЖдЦфЪЉМгвЛИі1gЕФСІЁЃ
дкетжжЧщПіЯТКазгУЛгавЦЖЏЕЋЮвУЧШЮШЛЖСШЁЕНZжсга-1gЕФжЕЁЃЧђдкЧНБкЩЯЪЉМгЕФбЙСІЪЧгЩв§СІдьГЩЕФЁЃ
дкРэТлЩЯЃЌЫќПЩвдЪЧВЛЭЌРраЭЕФСІСП - Р§ШчЃЌФуПЩвдЯыЯѓЮвУЧЕФЧђЪЧЬњжЪЕФЃЌНЋвЛИіДХЬњЗХдкКазгХдБпФЧЧђОЭЛсзВЩЯСэвЛУцЧНЁЃв§гУетИіР§згжЛЪЧЮЊСЫЫЕУїМгЫйЖШМЦЕФБОжЪЪЧМьВтСІЖјЗЧМгЫйЖШЁЃжЛЪЧМгЫйЖШЫљв§Ц№ЕФЙпадСІе§КУФмБЛМгЫйЖШМЦЕФМьВтзАжУЫљВЖЛёЁЃ
ЫфШЛетИіФЃаЭВЂЗЧвЛИіMEMSДЋИаЦїЕФецЪЕЙЙдьЃЌЕЋЫќгУРДНтОігыМгЫйЖШМЦЯрЙиЕФЮЪЬтЯрЕБгааЇЁЃ
ЪЕМЪЩЯгааЉРрЫЦДЋИаЦїжагаН№ЪєаЁЧђЃЌЫќУЧГЦзїЧуНЧПЊЙиЃЌЕЋЪЧЫќУЧЕФЙІФмИќШѕЃЌжЛФмМьВтЩшБИЪЧЗёдквЛЖЈГЬЖШФкЧуаБЃЌШДВЛФмЕУЕНЧуаБЕФГЬЖШЁЃЕНФПЧАЮЊжЙЃЌЮвУЧвбОЗжЮіСЫЕЅжсЕФМгЫйЖШМЦЪфГіЃЌетЪЧЪЙгУЕЅжсМгЫйЖШМЦЫљФмЕУЕНЕФЁЃШ§жсМгЫйЖШМЦЕФеце§МлжЕдкгкЫќУЧФмЙЛМьВтШЋВПШ§ИіжсЕФЙпадСІЁЃ
ШУЮвУЧЛиЕНКазгФЃаЭЃЌВЂНЋКазгЯђгва§зЊ45ЖШЁЃЯждкЧђЛсгыСНИіУцНгДЅЃКZ-КЭX-ЃЌМћЯТЭМЃК
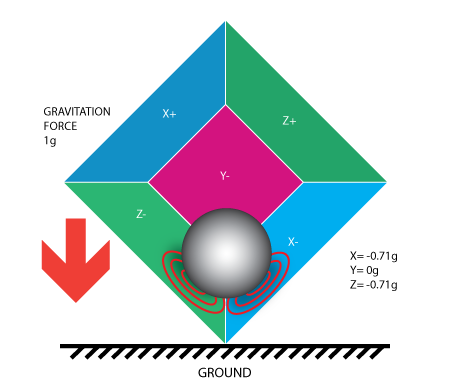
0.71gетИіжЕЪЧВЛЪЧШЮвтЕФЃЌЫќУЧЪЕМЪЩЯЪЧ1/2ЕФЦНЗНИљЕФНќЫЦжЕЁЃЮвУЧНщЩмМгЫйЖШМЦЕФЯТвЛИіФЃаЭЪБетвЛЕуЛсИќЧхГўЁЃдкЩЯвЛИіФЃаЭжаЮвУЧв§ШыСЫжиСІВЂа§зЊСЫКазгЁЃдкзюКѓЕФСНИіР§згжаЮвУЧЗжЮіСЫКазгдкСНжжЧщПіЯТЕФЪфГіжЕЃЌСІЪИСПБЃГжВЛБфЁЃ
ЫфШЛетгажњгкРэНтМгЫйЖШМЦЪЧдѕУДКЭЭтВПСІЯрЛЅзїгУЕФЃЌЕЋШчЙћЮвУЧНЋзјБъЯЕЛЛЮЊМгЫйЖШЕФШ§ИіжсВЂЯыЯѓЪИСПСІдкжмЮЇа§зЊЃЌетЛсИќЗНБуМЦЫуЁЃ
ЧыПДПДдкЩЯУцЕФФЃаЭЃЌЮвБЃСєСЫжсЕФбеЩЋЃЌвдБуФуЕФЫМЮЌФмИќКУЕФДгЩЯвЛИіФЃаЭзЊЕНаТЕФФЃаЭжаЁЃ
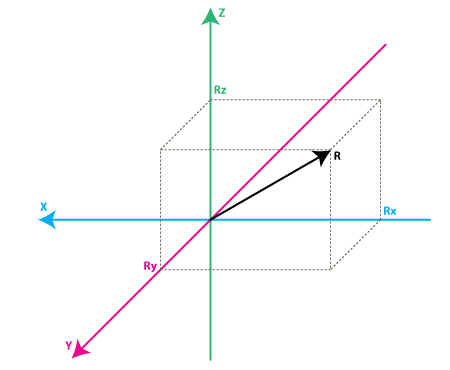
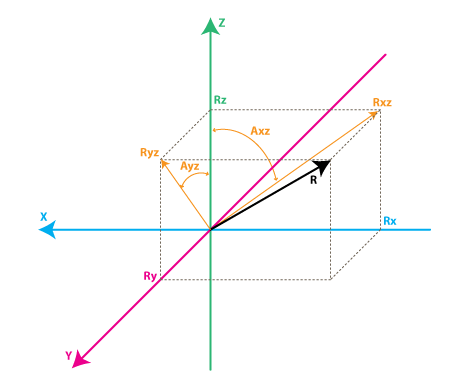
ЯыЯѓаТФЃаЭжаУПИіжсЖМЗжБ№ДЙжБгкдФЃаЭжаИїздЕФЧНУцЁЃЪИСПRЪЧМгЫйЖШМЦЫљМьВтЕФЪИСПЃЈЫќПЩФмЪЧжиСІЛђЩЯУцР§згжаЙпадСІЕФКЯГЩЃЉЁЃ
RXЃЌRYЃЌRZЪЧЪИСПRдкXЃЌYЃЌZЩЯЕФЭЖгАЁЃ
ЧызЂвтЯТСаЙиЯЕЃК
ЃЌR ^ 2 = RX ^ 2 + RY ^ 2 + RZ ^ 2ЃЈЙЋЪН1ЃЉ
ДЫЙЋЪНЕШМлгкШ§ЮЌПеМфЙДЙЩЖЈРэЁЃ
ЛЙМЧЕУЮвИеВХЫЕЕФ1/2ЕФЦНЗНИљ0.71ВЛЪЧИіЫцЛњжЕАЩЁЃ
ШчЙћФуАбЫќУЧДњЛиЩЯЪНЃЌЛиЙЫвЛЯТжиСІМгЫйЖШЪЧ1gЃЌФЧЮвУЧОЭФмбщжЄЃК
1 ^ 2 =ЃЈSQRTЃЈ1/2ЃЉЃЉ^ 2 + 0 ^ 2 +ЃЈSQRTЃЈ1/2ЃЉЃЉ^ 2
дкЙЋЪН1жаМђЕЅЕФШЁДњЃК R=1, Rx = -SQRT(1/2), Ry = 0 , Rz = -SQRT(1/2)
ОЙ§вЛДѓЖЮЕФРэТлађбдКѓЃЌЮвУЧКЭЪЕМЪЕФМгЫйЖШМЦКмППНќСЫЁЃRXЃЌRYЃЌRZжЕЪЧЪЕМЪжаМгЫйЖШМЦЪфГіЕФЯпадЯрЙижЕЃЌФуПЩвдгУЫќУЧНјааИїжжМЦЫуЁЃ
дкЮвУЧдЫгУЫќжЎЧАЮвУЧЯШЬжТлвЛЕуЛёШЁМгЫйЖШМЦЪ§ОнЕФЗНЗЈЁЃ
ДѓЖрЪ§МгЫйЖШМЦПЩЙщЮЊСНРрЃКЪ§зжКЭФЃФтЁЃ
Ъ§зжМгЫйЖШМЦПЩЭЈЙ§I2CЃЌSPIЛђUSARTЗНЪНЛёШЁаХЯЂЃЌЖјФЃФтМгЫйЖШМЦЕФЪфГіЪЧвЛИідкдЄЖЈЗЖЮЇФкЕФЕчбЙжЕЃЌФуашвЊгУADCЃЈФЃФтСПзЊЪ§зжСПЃЉФЃПщНЋЦфзЊЛЛЮЊЪ§зжжЕЁЃ
ЮвНЋВЛЛсЯъЯИНщЩмADCЪЧдѕУДЙЄзїЕФЃЌВПЗждвђЪЧетЪЧИіКмЙуЕФЛАЬтЃЌСэвЛИідвђЪЧВЛЭЌЦНЬЈЕФADCЖМЛсгаВюБ№ЁЃгааЉMCUОпгаФкжУADCФЃПщЃЌЖјгааЉдђашвЊЭтВПЕчТЗНјааADCзЊЛЛЁЃ
ВЛЙмЪЙгУЪВУДРраЭЕФADCФЃПщЃЌФуЖМЛсЕУЕНвЛИідквЛЖЈЗЖЮЇФкЕФЪ§жЕЁЃР§ШчвЛИі10ЮЛADCФЃПщЕФЪфГіжЕЗЖЮЇдк0
.. 1023МфЃЌЧызЂвтЃЌ1023 = 2 ^ 10 -1ЁЃ
вЛИі12ЮЛADCФЃПщЕФЪфГіжЕЗЖЮЇдк0 .. 4095ФкЃЌзЂвтЃЌ4095 = 2 ^ 12-1ЁЃ
ЮвУЧМЬајЃЌЯШПМТЧЯТвЛИіМђЕЅЕФР§згЃЌМйЩшЮвУЧДг10ЮЛADCФЃПщЕУЕНСЫвдЯТЕФШ§ИіжсЕФЪ§ОнЃК
AdcRx = 586
AdcRy = 630
AdcRz = 561
УПИіADCФЃПщЖМгавЛИіВЮПМЕчбЙЃЌМйЩшдкЮвУЧЕФР§згжаЃЌЫќЪЧ3.3VЁЃвЊНЋвЛИі10ЮЛЕФADCжЕзЊГЩЕчбЙжЕЃЌЮвУЧЪЙгУЯТСаЙЋЪНЃК
VoltsRx = AdcRx * VREF / 1023
аЁзЂЃК8ЮЛADCЕФзюДѓжЕЪЧ255 = 2 ^ 8 -1ЃЌ12ЮЛADCзюДѓжЕЪЧ4095 = 2 ^ 12
-1ЁЃ
НЋ3ИіжсЕФжЕДњШыЩЯЪНЃЌЕУЕНЃК
VoltsRx = 586 * 3.3 / 1023 =ЁЋ1.89VЃЈНсЙћШЁСНЮЛаЁЪ§ЃЉ
VoltsRy = 630 * 3.3 / 1023 =ЁЋ2.03V
VoltsRz = 561 * 3.3 / 1023 =ЁЋ1.81V
УПИіМгЫйЖШМЦЖМгавЛИіСуМгЫйЖШЕФЕчбЙжЕЃЌФуПЩвддкЫќЕФЫЕУїЪщжаевЕНЃЌетИіЕчбЙжЕЖдгІгкМгЫйЖШЮЊ0gЁЃ
ЭЈЙ§МЦЫуЯрЖд0gЕчбЙЕФЦЋвЦСПЮвУЧПЩвдЕУЕНвЛИігаЗћКХЕФЕчбЙжЕЁЃБШЗНЫЕЃЌ0gЕчбЙжЕ VzeroG= 1.65VЃЌЭЈЙ§ЯТУцЕФЗНЪНПЩвдЕУЕНЯрЖд0gЕчбЙЕФЦЋвЦСП:
DeltaVoltsRx = 1.89V - 1.65V = 0.24V
DeltaVoltsRy = 2.03V - 1.65V = 0.38V
DeltaVoltsRz = 1.81V - 1.65V = 0.16V
ЯждкЮвУЧЕУЕНСЫМгЫйЖШМЦЕФЕчбЙжЕЃЌЕЋЫќЕФЕЅЮЛЛЙВЛЪЧgЃЈ9.8m/s^2ЃЉЃЌ
зюКѓЕФзЊЛЛЃЌЮвУЧЛЙашвЊв§ШыМгЫйЖШМЦЕФСщУєЖШЃЈSensitivityЃЉЃЌЕЅЮЛЭЈГЃЪЧ mV/gЁЃ
БШЗНЫЕЃЌМгЫйЖШМЦЕФСщУєЖШ Sensitivity= 478.5mV / g = 0.4785V /gЁЃ
СщУєЖШжЕПЩвддкМгЫйЖШМЦЫЕУїЪщжаевЕНЁЃвЊЛёЕУзюКѓЕФЕЅЮЛЮЊgЕФМгЫйЖШЃЌЮвУЧЪЙгУЯТСаЙЋЪНМЦЫуЃК
RX = DeltaVoltsRx /Sensitivity
RX = 0.24V / 0.4785V / G =ЁЋ0.5g
RY = 0.38V / 0.4785V / G =ЁЋ0.79g
RZ = 0.16V / 0.4785V / G =ЁЋ0.33g
ЕБШЛЃЌЮвУЧПЩвдАбЫљгаЕФВНжшШЋВПЗХдквЛИіЪНзгРяЃЌЕЋЮвЯыЭЈЙ§НщЩмУПвЛИіВНжшвдБуШУФуСЫНтдѕУДЖСШЁвЛИіADCжЕВЂНЋЦфзЊЛЛЮЊЕЅЮЛЮЊgЕФЪИСПСІЕФЗжСПЁЃ
Rx = (AdcRx * Vref / 1023 ЈC VzeroG) / Sensitivity
(ЙЋЪН2)
Ry = (AdcRy * Vref / 1023 ЈC VzeroG) / Sensitivity
Rz = (AdcRz * Vref / 1023 ЈC VzeroG) / Sensitivity
ЯждкЮвУЧЕУЕНСЫЙпадСІЪИСПЕФШ§ИіЗжСПЃЌШчЙћЩшБИГ§СЫжиСІЭтВЛЪмШЮКЮЭтСІгАЯьЃЌФЧЮвУЧОЭПЩвдШЯЮЊетИіЗНЯђОЭЪЧжиСІЪИСПЕФЗНЯђЁЃ
ШчЙћФуЯыМЦЫуЩшБИЯрЖдгкЕиУцЕФЧуНЧЃЌПЩвдМЦЫуетИіЪИСПКЭZжсжЎМфЕФМаНЧЁЃ
ШчЙћФуЖдУПИіжсЕФЧуНЧЖМИааЫШЄЃЌФуПЩвдАбетИіНсЙћЗжЮЊСНИіЗжСПЃКXжсЁЂYжсЧуНЧЃЌетПЩвдЭЈЙ§МЦЫужиСІЪИСПКЭXЁЂYжсЕФМаНЧЕУЕНЁЃ
МЦЫуетаЉНЧЖШБШФуЯыЯѓЕФМђЕЅЃЌЯждкЮвУЧвбОЫуГіСЫRxЃЌRyЃЌRzЕФжЕЃЌШУЮвУЧЛиЕНЮвУЧЕФЩЯвЛИіМгЫйЖШФЃаЭЃЌдйМгвЛаЉБъзЂЩЯШЅЃК
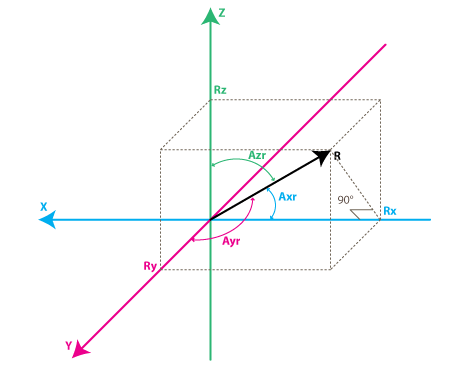
ЮвУЧИааЫШЄЕФНЧЖШЪЧЯђСПRКЭXЃЌYЃЌZжсжЎМфЕФМаНЧЃЌФЧОЭСюетаЉНЧЖШЮЊAxrЃЌAyrЃЌAzrЁЃЙлВьгЩRКЭRxзщГЩЕФжБНЧШ§НЧаЮЃК
cos(Axr) = Rx / R , РрЫЦЕФЃК
cos(Ayr) = Ry / R
cos(Azr) = Rz / R
ДгЙЋЪН1ЮвУЧПЩвдЭЦЕМГі R = SQRT( Rx^2 + Ry^2 + Rz^2)
ЭЈЙ§arccos()КЏЪ§ЃЈcos()ЕФЗДКЏЪ§ЃЉЮвУЧПЩвдМЦЫуГіЫљашЕФНЧЖШЃК
Axr = arccos(Rx/R)
Ayr = arccos(Ry/R)
Azr = arccos(Rz/R)
ЮвУЧЛЈСЫДѓЖЮЕФЦЊЗљРДНтЪЭМгЫйЖШМЦФЃаЭЃЌзюКѓЫљвЊЕФжЛЪЧвдЩЯетМИИіЙЋЪНЁЃ
ИљОнФуЕФгІгУГЁКЯЃЌФуПЩФмЛсгУЕНЮвУЧЭЦЕМГіРДЕФМИИіЙ§ЖЩЙЋЪНЁЃ
МгЫйЖШДЋИаЦїПЩвдгУРДВтСПМгЫйЖШЃЌЛђепМьВтЧуаБЁЂГхЛїЁЂеёЖЏЕШдЫЖЏзДЬЌЃЌ
АяжњЪЕЯжЙЄвЕЁЂвНСЦЁЂЭЈаХЁЂЯћЗбЕчзгКЭЦћГЕЕШСьгђжаЕФЖржжгІгУЁЃ
ИљОнВЛЭЌЕФгІгУЃЌМгЫйЖШДЋИаЦїЕФВтСПЗЖЮЇДгМИg ЕНМИЪЎg ВЛЕШЁЃ
Ъ§зжЪфГіЕФМгЫйЖШДЋИаЦїЛЙЛсМЏГЩЖржжжаЖЯФЃЪНЁЃ
етаЉЬиадПЩвдЮЊгУЛЇЬсЙЉИќМгЗНБуСщЛюЕФНтОіЗНАИЁЃ
ЭгТнвЧЃК
НгЯТРДвЊНщЩмЭгТнвЧФЃПщЁЃ
ЕЋдкДЫжЎЧАЃЌЮвУЧдйНщЩмМИИіКмГЃгУЕФЙЋЪНЃК
cosX = cos(Axr) = Rx / R
cosY = cos(Ayr) = Ry / R
cosZ = cos(Azr) = Rz / R
етШ§ИіЙЋЪНЭЈГЃГЦзїЗНЯђгрЯв ЃЌЫќжївЊБэДяСЫЕЅЮЛЯђСПЃЈГЄЖШЮЊ1ЕФЯђСПЃЉКЭRЯђСПОпгаЯрЭЌЕФЗНЯђЁЃ
ФуПЩвдКмШнвзЕибщжЄЃК
SQRTЃЈcosX ^ 2 + COSY ^ 2 + cosZ ^ 2ЃЉ= 1
етЪЧИіКмКУЕФаджЪЃЌвђЮЊЫќБмУтСЫЮвУЧвЛжБМьВтRЯђСПЕФФЃЃЈГЄЖШЃЉЁЃ
ЭЈГЃШчЙћЮвУЧжЛЪЧЖдЙпадСІЕФЗНЯђИааЫШЄЃЌФЧБъзМЛЏФЃГЄвдМђЛЏЦфЫћМЦЫуЪЧИіУїжЧЕФбЁдёЁЃ
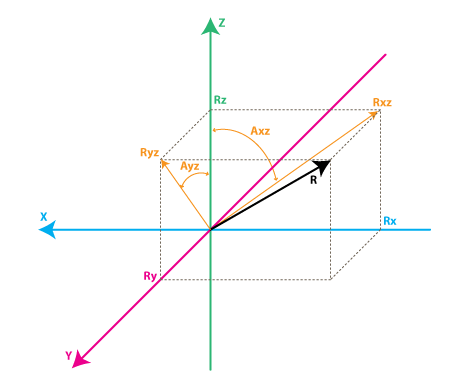
ЭгТнвЧЕФУПИіЭЈЕРМьВтвЛИіжсЕФа§зЊЁЃ
Р§ШчЃЌвЛИі2жсЭгТнвЧМьВтШЦXКЭYжсЕФа§зЊЁЃ
ЮЊСЫгУЪ§зжРДБэДяетаЉа§зЊЃЌЮвУЧЯШв§НјвЛаЉЗћКХЁЃЪзЯШЮвУЧЖЈвхЃК
Rxz ЈC ЙпадСІЪИСПRдкXZЦНУцЩЯЕФЭЖгА
Ryz ЈC ЙпадСІЪИСПRдкYZЦНУцЕФЩЯЭЖгА
дкгЩRxzКЭRzзщГЩЕФжБНЧШ§НЧаЮжаЃЌдЫгУЙДЙЩЖЈРэПЩЕУЃК
Rxz^2 = Rx^2 + Rz^2 ЃЌЭЌбљЃК
Ryz^2 = Ry^2 + Rz^2
ЭЌЪБзЂвтЃК
R^2 = Rxz^2 + Ry^2 ЃЌетИіЙЋЪНПЩвдЙЋЪН1КЭЩЯУцЕФЙЋЪНЭЦЕМГіРДЃЌвВПЩгЩRКЭRyzЫљзщГЩЕФжБНЧШ§НЧаЮЭЦЕМГіРД
R ^ 2 = Ryz ^ 2 + RX ^ 2ЯрЗДЃЌЮвУЧАДШчЯТЗНЗЈЖЈвхZжсКЭRxzЁЂRyzЯђСПЫљГЩЕФМаНЧЃК
AXZ - RxzЃЈЪИСПRдкXZЦНУцЕФЭЖгАЃЉКЭZжсЫљГЩЕФМаНЧ
AYZ - RyzЃЈЪИСПRдкYZЦНУцЕФЭЖгАЃЉКЭZжсЫљГЩМаНЧЭгТнвЧВтСПЩЯУцЖЈвхЕФНЧЖШЕФБфЛЏТЪЁЃ
ЛЛОфЛАЫЕЃЌЫќЛсЪфГівЛИігыЩЯУцетаЉНЧЖШБфЛЏТЪЯпадЯрЙиЕФжЕЁЃ
ЮЊСЫНтЪЭетвЛЕуЃЌЮвУЧЯШМйЩшдкt0ЪБПЬЃЌЮвУЧвбВтЕУШЦYжса§зЊЕФНЧЖШЃЈвВОЭЪЧAxzЃЉЃЌЖЈвхЮЊAxz0ЃЌжЎКѓдкt1ЪБПЬЮвУЧдйДЮВтСПетИіНЧЖШЃЌЕУЕНAxz1ЁЃ
НЧЖШБфЛЏТЪАДЯТУцЗНЗЈМЦЫуЃК
RateAxz = (Axz1 ЈC Axz0) / (t1 ЈC t0).
ШчЙћгУЖШРДБэЪОНЧЖШЃЌУыРДБэЪОЪБМфЃЌФЧетИіжЕЕФЕЅЮЛОЭЪЧ ЖШ/УыЁЃетОЭЪЧЭгТнвЧМьВтЕФЖЋЮїЁЃ
дкЪЕМЪдЫгУжаЃЌЭгТнвЧвЛАуЖМВЛЛсжБНгИјФувЛИіЕЅЮЛЮЊЖШ/УыЕФжЕЃЈГ§ЗЧЫќЪЧИіЬиЪтЕФЪ§зжЭгТнвЧЃЉЁЃЕУЕНвЛИіADCжЕВЂЧввЊгУРрЫЦЙЋЪН2ЕФЪНзгНЋЦфзЊЛЛГЩЕЅЮЛЮЊ
ЖШ/УыЕФжЕЁЃ
ШУЮвУЧРДНщЩмЭгТнвЧЪфГіжЕзЊЛЛжаЕФADCВПЗжЃЈМйЩшЪЙгУ10ЮЛADCФЃПщЃЌШчЙћЪЧ8ЮЛADCЃЌгУ1023ДњЬц255ЃЌШчЙћЪЧ12ЮЊADCгУ4095ДњЬц1023ЃЉЁЃ
RateAxz = (AdcGyroXZ * Vref / 1023 ЈC VzeroRate) /
Sensitivity ЙЋЪН3
RateAyz = (AdcGyroYZ * Vref / 1023 ЈC VzeroRate) /
Sensitivity
AdcGyroXZЃЌAdcGyroYZ - етСНИіжЕгЩADCЖСШЁЃЌЫќУЧЗжБ№ДњБэЪИСПRЕФЭЖгАдкXZКЭYZЦНУцФкРяЕФзЊНЧЃЌвВПЩЕШМлЕФЫЕЃЌа§зЊПЩЗжНтЮЊЕЅЖРШЦYКЭXжсЕФдЫЖЏЁЃ
Vref ЈC ADCЕФВЮПМЕчбЙЃЌЩЯР§жаЮвУЧЪЙгУ3.3V
VzeroRate ЈC ЪЧСуБфЛЏТЪЕчбЙЃЌЛЛОфЛАЫЕЫќЪЧЭгТнвЧВЛЪмШЮКЮзЊЖЏгАЯьЪБЕФЪфГіжЕЃЌЖдAcc GyroАхРДЫЕЃЌПЩвдШЯЮЊЪЧ1.23VЃЈДЫжЕЭЈГЃПЩвддкЫЕУїЪщжаевЕНЁЊЁЊЕЋЧЇЭђБ№ЯраХетИіжЕЃЌвђЮЊДѓЖрЪ§ЕФЭгТнвЧдкКИНгКѓЛсгавЛЖЈЕФЦЋВюЃЌЫљвдПЩвдЪЙгУЕчбЙМЦВтСПУПИіЭЈЕРЕФЪфГіжЕЃЌЭЈГЃетИіжЕдкКИНгКѓОЭВЛЛсИФБфЃЌШчЙћгаЬјЖЏЃЌдкЩшБИЪЙгУЧАаДвЛИіаЃзМГЬађЖдЦфНјааВтСПЃЌгУЛЇгІЕБдкЩшБИЦєЖЏЕФЪБКђБЃГжЩшБИОВжЙвдНјаааЃзМЃЉЁЃ
Sensitivity ЈCЭгТнвЧЕФСщУєЖШЃЌЕЅЮЛmV/(deg/s)ЃЌЭЈГЃаДзїmV/deg/s,ЫќЕФвтЫМОЭЪЧШчЙћа§зЊЫйЖШдіМг1Ёу/s,ЭгТнвЧЕФЪфГіОЭЛсдіМгЖрЩйmVЁЃAcc_GyroАхЕФСщУєЖШжЕЪЧ2mV/deg/sЛђ0.002V/deg/sШУЮвУЧОйИіР§згЃЌМйЩшЮвУЧЕФADCФЃПщЗЕЛивдЯТжЕЃК
AdcGyroXZ = 571
AdcGyroXZ = 323
гУЩЯУцЕФЙЋЪНЃЌдкДњШыAcc GyroАхЕФВЮЪ§ЃЌПЩЕУЃК
RateAxz = (571 * 3.3V / 1023 ЈC 1.23V) / ( 0.002V/deg/s)
=~ 306 deg/s
RateAyz = (323 * 3.3V / 1023 ЈC 1.23V) / ( 0.002V/deg/s)
=~ -94 deg/s
ЛЛОфЛАЫЕЩшБИШЦYжсЃЈвВПЩвдЫЕдкXZЦНУцФкЃЉвд306Ёу/sЫйЖШКЭШЦXжсЃЈЛђепЫЕYZЦНУцФкЃЉвд-94Ёу/sЕФЫйЖШа§зЊЁЃ
ЧызЂвтЃЌИККХБэЪОИУЩшБИГЏзХЗДЗНЯђа§зЊЁЃАДееЙпР§ЃЌвЛИіЗНЯђЕФа§зЊЪЧе§жЕЁЃвЛЗнКУЕФЭгТнвЧЫЕУїЪщЛсИцЫпФуФФИіЗНЯђЪЧе§ЕФЃЌЗёдђФуОЭвЊздМКВтЪдГіФФИіа§зЊЗНЯђЛсЪЙЕУЪфГіНХЕчбЙдіМгЁЃзюКУЪЙгУЪОВЈЦїНјааВтЪдЃЌвђЮЊвЛЕЉФуЭЃжЙСЫа§зЊЃЌЕчбЙОЭЛсЕєЛиСуЫйТЪЫЎЦНЁЃШчЙћФуЪЙгУЕФЪЧЭђгУБэЃЌФуЕУБЃГжвЛЖЈЕФа§зЊЫйЖШМИУыжгВЂЭЌЪББШНЯЕчбЙжЕКЭСуЫйТЪЕчбЙжЕЁЃШчЙћжЕДѓгкСуЫйТЪЕчбЙжЕФЧЫЕУїетИіа§зЊЗНЯђЪЧе§ЯђЁЃ
МгЫйЖШМЦКЭЭгТнвЧЕФЪ§ОнШкКЯЫуЗЈЃК
зЂЃКОпЬхЕФДњТыЪЕЯжКЭЫуЗЈВтЪдЃЌЧыдФЖСетЦЊЮФеТЃК?http://starlino.com/imu_kalman_arduino.html
ШкКЯМгЫйЖШМЦКЭЭгТнвЧЪБЃЌЪзЯШвЊзіЕФОЭЪЧЭГвЛЫќУЧЕФзјБъЯЕЁЃ
зюМђЕЅЕФАьЗЈОЭЪЧНЋМгЫйЖШМЦзїЮЊВЮПМзјБъЯЕЁЃ
ДѓЖрЪ§ЕФМгЫйЖШМЦЙцИёЪщЖМЛсжИГіЖдгІгкЮяРэаОЦЌЛђЩшБИЕФXZYжсЗНЯђЁЃ
Р§ШчЃЌЯТУцОЭЪЧAcc GyroАхЕФЫЕУїЪщжаИјГіЕФXYZжсЗНЯђЃК
НгЯТРДЕФВНжшЪЧЃК
- ШЗЖЈЭгТнвЧЕФЪфГіЖдгІЕНЩЯЪіЬжТлЕФRateAxzЃЌRateAyzжЕЁЃ
- ИљОнЭгТнвЧКЭМгЫйЖШМЦЕФЮЛжУОіЖЈЪЧЗёвЊЗДзЊЪфГіжЕВЛвЊЩшЯыЭгТнвЧЭгЕФЪфГігаXYЃЌЫќЛсЪЪгІМгЫйЖШМЦзјБъЯЕРяЕФШЮКЮжсЃЌОЁЙметИіЪфГіЪЧIMUФЃПщЕФвЛВПЗжЁЃзюКУЕФАьЗЈОЭЪЧВтЪдЁЃНгЯТРДЕФЪОР§гУРДШЗЖЈФФИіЭгТнвЧЕФЪфГіЖдгІRateAxzЁЃ
- ЪзЯШНЋЩшБИБЃГжЫЎЦНЁЃМгЫйЖШМЦЕФXYжсЪфГіЛсЪЧСуМгЫйЖШЕчбЙЃЈAcc GyroАхЕФжЕЪЧ1.65VЃЉ
- НгЯТРДНЋЩшБИШЦYжса§зЊЃЌЛЛОфЛАЫЕОЭЪЧНЋЩшБИдкXZЦНУцФка§зЊЃЌЫљвдXЁЂZЕФМгЫйЖШЪфГіжЕЛсБфЛЏЖјYжсБЃГжВЛБфЁЃ
- ЕБвддШЫйа§зЊЩшБИЕФЪБКђЃЌзЂвтЭгТнвЧЕФФФИіЭЈЕРЪфГіжЕБфЛЏСЫЃЌЦфЫћЪфГігІИУБЃГжВЛБфЁЃ
- дкЭгТнвЧШЦYжса§зЊЃЈдкXZЦНУцФка§зЊЃЉЕФЪБКђЪфГіжЕБфЛЏЕФОЭЪЧAdcGyroXZЃЌгУгкМЦЫуRateAxz
- зюКѓвЛВНЃЌШЗШЯа§зЊЕФЗНЯђЪЧЗёКЭЮвУЧЕФФЃаЭЖдгІЃЌвђЮЊЭгТнвЧКЭМгЫйЖШЕФЮЛжУЙиЯЕЃЌгаЪБКђФуПЩФмвЊАбRateAxzжЕЗДЯђ
- жиИДЩЯУцЕФВтЪдЃЌНЋЩшБИШЦYжса§зЊЃЌетДЮВщПДМгЫйЖШМЦЕФXжсЪфГіЃЈвВОЭЪЧAdcRxЃЉЁЃШчЙћAdcRxдіДѓЃЈДгЫЎЦНЮЛжУПЊЪМа§зЊЕФЕквЛИі90ЁуЃЉЃЌФЧAdcGyroXZгІЕБМѕаЁЁЃетЪЧвђЮЊЮвУЧЙлВьЕФЪЧжиСІЪИСПЃЌЕБЩшБИГЏвЛИіЗНЯђа§зЊЪБЪИСПЛсГЏЯрЗДЕФЗНЯђа§зЊЃЈЯрЖдзјБъЯЕдЫЖЏЃЉЁЃ
ЫљвдЃЌШчЙћФуВЛЯыЗДзЊRateAxzЃЌФуПЩвддкЙЋЪН3жав§Шые§ИККХРДНтОіетИіЮЪЬтЃК
RateAxz = InvertAxz * (AdcGyroXZ * Vref / 1023 ЈC VzeroRate)
/ Sensitivity ,ЦфжаInvertAxz= 1 Лђ-1
ЭЌбљЕФЗНЗЈПЩвдгУРДВтЪдRateAyzЃЌНЋЩшБИШЦXжса§зЊЃЌФуОЭФмВтГіЭгТнвЧЕФФФИіЪфГіЖдгІгкRateAyzЃЌвдМАЫќЪЧЗёашвЊЗДзЊЁЃ
вЛЕЉФуШЗЖЈСЫInvertAyzЃЌФуОЭФмПЩвдгУЯТУцЕФЙЋЪНРДМЦЫуRateAyzЃК
RateAyz = InvertAyz * (AdcGyroYZ * Vref / 1023 ЈC VzeroRate)
/ SensitivityШчЙћЖдAcc GyroАхНјааетаЉВтЪдЃЌФуЛсЕУЕНЯТУцЕФетаЉНсЙћЃК
- RateAxzЕФЪфГіЙмНХЪЧGX4ЃЌInvertAxz = 1
- RateAyzЪфГіЙмНХЪЧGY4ЃЌInvertAyz = 1
ДгЯждкПЊЪМЮвУЧШЯЮЊФувбОЩшжУКУСЫIMUФЃПщВЂФмМЦЫуГіе§ШЗЕФAxrЃЌAyrЃЌAzrжЕЃЈдкЕквЛВПЗжМгЫйЖШМЦжаЖЈвхЃЉвдМАRateAyzЃЌRateAyzЃЈдкЕкЖўВПЗжЭгТнвЧжаЃЉЁЃЯТвЛВНЃЌЮвУЧЗжЮіетаЉжЕжЎМфЕФЙиЯЕВЂЕУЕНИќзМШЗЕФЩшБИКЭЕиЦНУцжЎМфЕФЧуНЧЁЃ
ФуПЩФмЛсЮЪздМКвЛИіЮЪЬтЃЌШчЙћМгЫйЖШМЦвбОИцЫпЮвУЧAxrЃЌAyrЃЌAzrЕФЧуНЧЃЌЮЊЪВУДЛЙвЊЗбЪТШЅЕУЕНЭгТнвЧЕФЪ§ОнЃПД№АИКмМђЕЅЃКМгЫйЖШМЦЕФЪ§ОнВЛЪЧ100%зМШЗЕФЁЃ
ЛЙгаМИИідвђЃЌЛЙМЧМгЫйЖШМЦВтСПЕФЪЧЙпадСІЃЌетИіСІПЩвдгЩжиСІв§Ц№ЃЈРэЯыЧщПіжЛЪмжиСІгАЯьЃЉЃЌЕБвВПЩФмгЩЩшБИЕФМгЫйЖШЃЈдЫЖЏЃЉв§Ц№ЁЃ
вђДЫЃЌОЭЫуМгЫйЖШМЦДІгквЛИіЯрЖдБШНЯЦНЮШЕФзДЬЌЃЌЫќЖдвЛАуЕФе№ЖЏКЭЛњаЕдыЩљКмУєИаЁЃетОЭЪЧЮЊЪВУДДѓВПЗжЕФIMUЯЕЭГЖМашвЊЭгТнвЧРДЪЙМгЫйЖШМЦЕФЪфГіИќЦНЛЌЁЃ
ЕЋЪЧдѕУДАьЕНетЕуФиЃПЭгТнвЧВЛЪмдыЩљгАЯьТ№ЃП
ЭгТнвЧвВЛсгадыЩљЃЌЕЋгЩгкЫќМьВтЕФЪЧа§зЊЃЌвђДЫЖдЯпадЛњаЕдЫЖЏУЛФЧУДУєИаЃЌВЛЙ§ЭгТнвЧгаСэЭтвЛжжЮЪЬтЃЌБШШчЦЏвЦЃЈЕБбЁдёЭЃжЙЕФЪБКђЕчбЙВЛЛсЛиЕНСуЫйТЪЕчбЙЃЉЁЃ
ШЛЖјЃЌЭЈЙ§МЦЫуМгЫйЖШМЦКЭЭгТнвЧЕФЦНОљжЕЮвУЧФмЕУЕНвЛИіЯрЖдИќзМШЗЕФЕБЧАЩшБИЕФЧуНЧжЕЃЌетБШЕЅЖРЪЙгУМгЫйЖШМЦИќКУЁЃ
ЮѓВюЛђДэЮѓЪ§ОнЕФПЈЖћТќТЫВЈЫуЗЈЃК
ЮвУЧвЊНщЩмвЛжжЫуЗЈЃЌЫуЗЈЪмПЈЖћТќТЫВЈжаЕФвЛаЉЫМЯыЦєЗЂЃЌЕЋЪЧЫќИќМђЕЅВЂЧвИќШнвздкЧЖШыЪНЩшБИжаЪЕЯжЁЃ
дкДЫжЎЧАЃЌШУЮвУЧЯШПДПДЮвУЧашвЊЫуЗЈМЦЫуЪВУДжЕЁЃ
ЫљвЊЫуЕФОЭЪЧжиСІЪИСПR=[Rx,Ry,Rz]ЃЌЫќПЩгЩЦфЫћжЕЭЦЕМГіРДЃЌШчAxrЃЌAyrЃЌAzrЛђепcosXЃЌcosYЃЌcosZЃЌгЩетаЉжЕЮвУЧФмЕУЕНЩшБИЯрЖдЕиЦНУцЕФЧуНЧжЕЃЌетаЉЙиЯЕЮвУЧдкЕквЛВПЗжвбОЬжТлЙ§ЁЃ
гаШЫПЩФмЛсЫЕ-ИљОнЕквЛВПЗжЕФЙЋЪН2ЮвУЧВЛЪЧвбОЕУЕНRxЃЌRyЃЌRzЕФжЕСЫТ№ЃПЪЧЕФЃЌЕЋЪЧетаЉжЕжЛЪЧгЩМгЫйЖШМЦЪ§ОнЭЦЕМГіРДЕФЃЌШчЙћФужБНгНЋЫќУЧгУгкФуЕФГЬађФуЛсЕУЕНФбвдШЬЪмЕФдыЩљЁЃ
ЮЊСЫБмУтНјвЛВНЕФЛьТвЃЌЮвУЧжиаТЖЈвхМгЫйЖШМЦЕФВтСПжЕЃК
Racc ЈC ЪЧгЩМгЫйЖШМЦВтСПЕНЕУЙпадСІЪИСПЃЌЫќПЩЗжНтЮЊЯТУцЕФЗжСПЃЈдкXYZжсЩЯЕФЭЖгАЃЉЃК
RxAcc = (AdcRx * Vref / 1023 ЈC VzeroG) / Sensitivity
RyAcc = (AdcRy * Vref / 1023 ЈC VzeroG) / Sensitivity
RzAcc = (AdcRz * Vref / 1023 ЈC VzeroG) / Sensitivity
ЯждкЮвУЧЕУЕНСЫвЛзщжЛРДздгкМгЫйЖШМЦADCЕФжЕЁЃ
ЮвУЧАбетзщЪ§ОнНазіЁАvectorЁБЃЌВЂЪЙгУЯТУцЕФЗћКХЃК
Racc = [RxAcc,RyAcc,RzAcc]
вђЮЊетаЉRaccЕФЗжСППЩгЩМгЫйЖШМЦЪ§ОнЕУЕНЃЌЮвУЧПЩвдАбЫќЕБзіЫуЗЈЕФЪфШыЁЃ
ЧызЂвтRaccВтСПЕФЪЧжиСІЃЌШчЙћФуЕУЕНЕФЪИСПГЄЖШдМЕШгк1gФЧУДФуОЭЪЧе§ШЗЕФЃК
|Racc| = SQRT(RxAcc^2 +RyAcc^2 + RzAcc^2),
ЕЋЪЧЧыШЗЖЈАбЪИСПзЊЛЛГЩЯТУцЕФЪИСПЗЧГЃживЊЃК
Racc(normalized) = [RxAcc/|Racc| , RyAcc/|Racc| ,
RzAcc/|Racc|].
етПЩвдШЗБЃБъзМЛЏRaccЪМжеЪЧ1ЁЃНгРДЯТв§НјвЛИіаТЕФЯђСПЃК
Rest = [RxEst,RyEst,RzEst]
етОЭЪЧЫуЗЈЕФЪфГіжЕЃЌЫќОЙ§ЭгТнвЧЪ§ОнЕФаое§КЭЛљгкЩЯвЛДЮЙРЫуЕФжЕЁЃетЪЧЫуЗЈЫљзіЕФЪТЃК
-МгЫйЖШМЦИцЫпЮвУЧЃКЁАФуЯждкЕФЮЛжУЪЧRaccЁБ
ЮвУЧЛиД№ЃКЁАаЛаЛЃЌЕЋШУЮвШЗШЯвЛЯТЁБ
-ШЛКѓИљОнЭгТнвЧЕФЪ§ОнКЭЩЯвЛДЮЕФRestжЕаое§етИіжЕВЂЪфГіаТЕФЙРЫужЕRestЁЃ
-ЮвУЧШЯЮЊRestЪЧЕБЧАЩшБИзЫЬЌЕФЁАзюМбжЕЁБЁЃШУЮвУЧПДПДЫќЪЧдѕУДЪЕЯжЕФЁЃ
Ъ§СаЕФПЊЪМЃЌЮвУЧЯШШЯЮЊМгЫйЖШжЕе§ШЗВЂИГжЕЃК
Rest(0) = Racc(0)
RestКЭRaccЪЧЯђСПЃЌЫљвдЩЯУцЕФЪНзгПЩвдгУ3ИіМђЕЅЕФЪНзгДњЬцЃЌзЂвтБ№жиИДСЫЃК
RxEstЃЈ0ЃЉ= RxAccЃЈ0ЃЉ
RyEstЃЈ0ЃЉ= RyAccЃЈ0ЃЉ
RzEstЃЈ0ЃЉ= RzAccЃЈ0ЃЉНгЯТРДЮвУЧдкУПИіЕШЪБМфМфИєTУызівЛДЮВтСПЃЌЕУЕНаТЕФВтСПжЕЃЌВЂЖЈвхЮЊRaccЃЈ1ЃЉЃЌRaccЃЈ2ЃЉЃЌRaccЃЈ3ЃЉЕШЕШЁЃ
ЭЌЪБЃЌдкУПИіЪБМфМфИєЮвУЧвВМЦЫуГіаТЕФЙРЫужЕRestЃЈ1ЃЉ,RestЃЈ2ЃЉЃЌRestЃЈ3ЃЉЃЌЕШЕШЁЃМйЩшЮвУЧдкЕкnВНЁЃЮвУЧгаСНСавбжЊЕФжЕПЩвдгУЃК
Rest(n-1) ЈC ЧАвЛИіЙРЫужЕЃЌRest(0) = Racc(0)
Racc(n) ЈC ЕБЧАМгЫйЖШМЦВтСПжЕ
дкМЦЫуRestЃЈnЃЉЧАЃЌЮвУЧЯШв§НјвЛИіаТЕФжЕЃЌЫќПЩгЩЭгТнвЧКЭЧАвЛИіЙРЫужЕЕУЕНЁЃ
НазіRgyroЃЌЭЌбљЫќЪЧИіЪИСПВЂгЩ3ИіЗжСПзщГЩЃК
Rgyro = [RxGyro,RyGyro,RzGyro]
ЮвУЧЗжБ№МЦЫуетИіЪИСПЕФЗжСПЃЌДгRxGyroПЊЪМЁЃ
ЪзЯШЙлВьЭгТнвЧФЃаЭжаЯТУцЕФЙиЯЕЃЌИљОнгЩRzКЭRxzзщГЩЕФжБНЧШ§НЧаЮЮвУЧФмЭЦГіЃК
tan(Axz) = Rx/Rz => Axz = atan2(Rx,Rz)
ФуПЩФмДгЮДгУЙ§atan2етИіКЏЪ§ЃЌЫќКЭatanРрЫЦЃЌЕЋatanЗЕЛижЕЗЖЮЇЪЧЃЈ-PI/2,PI/2ЃЉЃЌatan2ЗЕЛижЕЗЖЮЇЪЧЃЈ-PIЃЌPIЃЉЃЌВЂЧвЫћгаСНИіВЮЪ§ЁЃ
ЫќФмНЋRxЃЌRzжЕзЊЛЛГЩ360ЁуЃЈ-PIЃЌPIЃЉФкЕФНЧЖШЁЃИќЖраХЯЂЧыдФЖС atan2.
ЫљвдЃЌжЊЕРСЫRxEstЃЈn-1ЃЉКЭRzEstЃЈn-1ЃЉЮвУЧЗЂЯжЃК
Axz(n-1) = atan2( RxEst(n-1) , RzEst(n-1) ).ЭгТнвЧВтСПЕФЪЧAxzНЧЖШБфЛЏТЪЃЌвђДЫЃЌЮвУЧПЩвдАДШчЯТЗНЗЈЙРЫуаТЕФНЧЖШAxzЃЈnЃЉЃК
Axz(n) = Axz(n-1) + RateAxz(n) * T
RateAxzПЩгЩЭгТнвЧADCЖСШЁЕУЕНЁЃ
ЭЈЙ§ЪЙгУЦНОљзЊЫйПЩгЩЕУЕНвЛИіИќзМШЗЕФЙЋЪНЃК
RateAxzAvg =ЃЈRateAxzЃЈNЃЉ+ RateAxzЃЈN-1ЃЉЃЉ/ 2
Axz(n) = Axz(n-1) + RateAxzAvg * T
ЭЌРэПЩЕУЃК
Ayz(n) = Ayz(n-1) + RateAyz(n) * T
КУСЫЃЌЮвУЧгаСЫAxzЃЈnЃЉЃЌAyzЃЈnЃЉЁЃЯждкЮвУЧШчКЮЭЦЕМГіRxGyro/RyGyro?
ИљОнЙЋЪН1ЮвУЧПЩвдАбRgyroГЄЖШаДГЩЯТЪНЃК
| Rgyro | = SQRTЃЈRxGyro ^ 2 + RyGyro ^ 2 + RzGyro
^ 2ЃЉ
ЭЌЪБЃЌвђЮЊЮвУЧвбОНЋRaccБъзМЛЏЃЌЮвУЧПЩвдШЯЮЊЫќЕФГЄЖШЪЧ1ВЂЧва§зЊКѓБЃГжВЛБфЃЌЫљвдаДГЩЯТУцЕФЗНЪНЯрЖдБШНЯАВШЋЃК
| Rgyro | = 1
ЮвУЧднЪБВЩгУИќЖЬЕФЗћКХНјааЯТУцЕФМЦЫуЃК
x =RxGyro , y=RyGyro, z=RzGyro
ИљОнЩЯУцЕФЙиЯЕПЩЕУЃК
x = x / 1 = x / SQRT(x^2+y^2+z^2)
ЗжзгЗжФИЭЌГ§вдSQRTЃЈX ^ 2 + Z ^ 2ЃЉ
x = ( x / SQRT(x^2 + z^2) ) / SQRT( (x^2 + y^2 + z^2)
/ (x^2 + z^2) )
зЂвтx / SQRT(x^2 + z^2) = sin(Axz), Ыљвд:
x = sin(Axz) / SQRT (1 + y^2 / (x^2 + z^2) )
НЋSQRTФкВПЗжЪНЕФЗжзгЗжФИЭЌГЫвдz^2
x = sin(Axz) / SQRT (1 + y^2 ?* z ^2 / (z^2 * (x^2
+ z^2)) )
зЂвт z / SQRT(x^2 + z^2) = cos(Axz)ЃЌ y / z = tan(Ayz),
ЫљвдзюКѓПЩЕУ:
x = sin(Axz) / SQRT (1 + cos(Axz)^2 * tan(Ayz)^2 )
ЬцЛЛГЩдРДЕФЗћКХПЩЕУЃК
RxGyro = sin(Axz(n)) / SQRT (1 + cos(Axz(n))^2 * tan(Ayz(n))^2
)
ЭЌРэПЩЕУЃК
RyGyro = sin(Ayz(n)) / SQRT (1 + cos(Ayz(n))^2 * tan(Axz(n))^2
)ЬсЪОЃКетИіЙЋЪНЛЙПЩвдИќНјвЛВНМђЛЏЁЃЗжЪНСНБпЭЌГ§вдsinЃЈaxzЃЈФуЃЉЃЉПЩЕУЃК
RxGyro = ?1 ?/ SQRT (1/ sin(Axz(n))^2 ?+ cos(Axz(n))^2
/ sin(Axz(n))^2 ?* tan(Ayz(n))^2 )
RxGyro = ?1 ?/ SQRT (1/ sin(Axz(n))^2 ?+ cot(Axz(n))^2
?* sin(Ayz(n))^2 ?/ cos(Ayz(n))^2 ) ?
ЯждкМгМѕ ? cos(Axz(n))^2/sin(Axz(n))^2 ? = cot(Axz(n))^2?
RxGyro = ?1 ?/ SQRT (1/ sin(Axz(n))^2 ?- ?cos(Axz(n))^2/sin(Axz(n))^2
? + cot(Axz(n))^2 ?* sin(Ayz(n))^2 ?/ cos(Ayz(n))^2
?+ cot(Axz(n))^2 )
злКЯЬѕМў1ЁЂ2КЭ3ЁЂ4ПЩЕУЃК
RxGyro = ?1 ?/ SQRT (1 ?+ ? cot(Axz(n))^2 * sec(Ayz(n))^2
), ? ? Цфжа ?cot(x) = 1 / tan(x) ?ЃЌ sec(x) = 1 / cos(x)
етИіЙЋЪНжЛгУСЫ2ИіШ§НЧКЏЪ§ВЂЧвМЦЫуСПИќЕЭЁЃ
ШчЙћФугаMathematicaГЬађЃЌЭЈЙ§ЪЙгУ FullSimplify
[Sin[A]^2/ ( 1 + Cos[A]^2 * Tan[B]^2)]ФуПЩвдбщжЄетИіЙЋЪНЁЃ
ЯждкЮвУЧЗЂЯжЃК
RzGyro ?= ?Sign(RzGyro)*SQRT(1 ЈC RxGyro^2 ЈC RyGyro^2).
ЦфжаЃЌЕБ RzGyro>=0ЪБЃЌSign(RzGyro) = 1 , ЕБ RzGyro<0ЪБЃЌSign(RzGyro)
= -1 ЁЃвЛИіМђЕЅЕФЙРЫуЗНЗЈЃК
Sign(RzGyro) = Sign(RzEst(n-1))
дкЪЕМЪгІгУжаЃЌЕБаФRzEstЃЈn-1ЃЉЧїНќгк0ЁЃ
етЪБКђФуПЩвдЬјЙ§ећИіЭгТнвЧНзЖЮВЂИГжЕЃКRgyro=RestЃЈn-1ЃЉЁЃRzПЩвдгУзїМЦЫуAxzКЭAyzЧуНЧЕФВЮПМЃЌЕБЫќЧїНќгк0ЪБЃЌЫќПЩФмЛсвчГіВЂв§ЗЂВЛКУЕФКѓЙћЁЃ
етЪБФуЛсЕУЕНКмДѓЕФИЁЕуЪ§ОнЃЌВЂЧвtan()/atan()КЏЪ§ЕУЕНЕФНсЙћЛсШБЗІОЋЖШЁЃЯждкЮвУЧЛиЙЫвЛЯТвбОЕУЕНЕФНсЙћЃЌЮвУЧдкЫуЗЈжаЕФЕкnВНЃЌВЂМЦЫуГіСЫЯТУцЕФжЕЃК
Racc ЈC МгЫйЖШМЦЖСШЁЕФЕБЧАжЕ
Rgyro ЈCИљОнRest(-1)КЭЕБЧАЭгТнвЧЖСШЁжЕЫљЕУЮвУЧИљОнФФИіжЕРДИќаТRestЃЈnЃЉФиЃПФуПЩФмвбОВТЕНЃЌСНепЖМВЩгУЁЃЮвУЧЛсгУвЛИіМгШЈЦНОљжЕЃЌЕУЃК
Rest(n) = (Racc * w1 + Rgyro * w2 ) / (w1 + w2)
ЗжзгЗжФИЭЌГ§вдw1ЃЌЙЋЪНПЩМђЛЏГЩЃК
Rest(n) = (Racc * w1/w1 + Rgyro * w2/w1 ) / (w1/w1
+ w2/w1)
Сюw2=w1=wGyroЃЌПЩЕУЃК
Rest(n) = (Racc + Rgyro * wGyro ) / (1 + wGyro)
дкЩЯУцЕФЙЋЪНжаЃЌwGyroБэЪОЮвУЧЖдМгЫйЖШМЦКЭЭгТнвЧЕФЯраХГЬЖШЁЃ
етИіжЕПЩвдЭЈЙ§ВтЪдШЗЖЈЃЌИљОнОбщжЕ5-20жЎМфЛсЕУЕНвЛИіКмКУЕФНсЙћЁЃДЫЫуЗЈКЭПЈЖћТќТЫВЈзюжївЊЕФВюБ№ЪЧЫќЕФШЈжиЪЧЯрЖдЙЬЖЈЕФЃЌЖјПЈЖћТќТЫВЈжаЕФШЈжиЛсЫцзХМгЫйЖШМЦЖСШЁЕФдыЩљЖјИФБфЁЃ
ПЈЖћТќТЫВЈзЂжиИјФувЛИіЁАзюКУЁБЕФРэТлНсЙћЃЌЖјДЫЫуЗЈИјФуЕФЪЧЪЕМЪЯюФПжаЁАЙЛгУЁБЕФНсЙћЁЃ
ФуПЩвдЪЕЯжвЛИіЫуЗЈЃЌЫќФмИљОнВтСПЕФдыЩљЖјИФБфwGyroжЕЃЌЕЋЖдДѓВПЗжгІгУРДЫЕЙЬЖЈЕФШЈживВФмЙЄзїЕФКмКУЁЃЯждкЕУЕНзюаТЕФЙРЫужЕЛЙВювЛВНЃК
RxEst(n) = (RxAcc + RxGyro * wGyro ) / (1 + wGyro)
RyEst(n) = (RyAcc + RyGyro * wGyro ) / (1 + wGyro)
RzEst(n) = (RzAcc + RzGyro * wGyro ) / (1 + wGyro)
ЯждкЃЌдйДЮБъзМЛЏЪИСПЃК
R = SQRT(RxEst(n) ^2 + RyEst(n)^2 + ?RzEst(n)^2 )
RxEst(n) = RxEst(n)/R
RyEst(n) = RyEst(n)/R
RzEst(n) = RzEst(n)/R
ЯждкЃЌПЩвддйДЮНјааЯТвЛТжбЛЗСЫЁЃзЂЃКЙигкДЫЫуЗЈЕФОпЬхЪЕЯжКЭВтЪдЃЌЧыдФЖСетЦЊЮФеТЃК
http://starlino.com/imu_kalman_arduino.htmlМгЫйЖШМЦКЭЭгТнвЧIMUШкКЯЕФЦфЫћзЪдДЃК
http://www.mikroquad.com/pub/Res
... ryFilter/filter . pdf
http://stackoverflow.com/questio
... -accelerometer - data
http://www.dimensionengineering .
com / accelerometers . htm
2016Фъ2дТ17Ше
ДЋИаЦїЕФЪЙгУгыТЫВЈЫуЗЈЃЈЪ§ОнДІРэЃЉЕФЙиЯЕ
ЮѓВюЛђДэЮѓЪ§ОнЕФРДдД
1[2013]жБСЂЮЛжУЕФНЧЖШжЕКЭдкЕЙЯТШЅЛђЧуаБЕФЪБКђЕФПьТ§жЕЃЈНЧЫйЖШЃЉЃЌЦфЪЕЫћУЧЪЧвЛИіСПЃЌвђЮЊЖдНЧЫйЖШЛ§ЗжОЭЪЧНЧЖШжЕЁЃ
НЧЫйЖШжЛЪЧЗДгГСЫЕЙЯТШЅЛђЧуаБЕФПьТ§ЃЌМДБфЛЏСПЁЃ
КУБШФуФУвЛИљПъзгжБСЂдкЪжжИЩЯЃЌФуПДМћЫќвЊЕЙЯТШЅЕФЪБКђЃЌЪжПЯЖЈЛсИњзХвЦЖЏЃЛ
ФувЛЗНУцПДЕНЕФЪЧПъзгЕЙЯТШЅЕФНЧЖШЃЌСэвЛИіЪЧПъзгЕЙЕФЪБКђЕФПьТ§ЃЌНЧЖШДѓЫйЖШПьЃЌФуздШЛвЦЖЏЕиПьЁЂЗљЖШвВДѓЃЌНЧЖШаЁЁЂЫйЖШТ§ЃЌФуздШЛвЦЖЏЕФТ§ЗљЖШвВаЁЁЃ
ВтСПНЧЖШвЛАуЪЙгУМгЫйЖШМЦОЭПЩвдСЫЃЌМгЫйЖШМЦЪЧЗжЮЊФЃФтЕФКЭЪ§зжЕФСНжжЃЌЖМЪЧПЩвдЪЙгУЕФЁЃ
дкЪЕМЪЧщПіжаЃЌМгЫйЖШМЦВтСПЕФНЧЖШЪЧВЛзМШЗЕФЃЌвђЮЊдкдЫЖЏЙ§ГЬжаДцдке№ЖЏМгЫйЖШЃЌетЛсЪЙЪфГіжЕВЛзМШЗЃЌВЛФмецЪЕЗДгГЦЋзЊНЧЖШЁЃ
етЪЧЕчзгдЊЦїМўБОЩэЕФЮЪЬтЃЌгааЉШЫЫЕгУМђЕЅЕФЪ§зжТЫВЈЃЈжажЕЁЂОљжЕЕШЃЉЃЌетаЉТЫВЈТЫГ§ЕФЪЧИЩШХаХКХЃЌетаХКХБОЩэЕФДэЮѓдѕУДТЫГ§ЃП
дйРДПМТЧСэвЛИіЦїМўЭгТнвЧЃЌЮвУЧжЊЕРЭгТнвЧЪЧВтСПНЧЫйЖШЕФЃЌЕЋЪЧНЧЫйЖШЛЛЫуГЩНЧЖШЪЧашвЊвЛИіЛ§ЗжЙ§ГЬЃЌМйШчдкЪфШыЪБгавЛИіМЋаЁЕФЮѓВюЃЌФЧУДетИіЮѓВюЫцзХЛ§ЗжНЋЛсдНРДдНДѓЃЌзюКѓЕУГіЕФНЧЖШздШЛвВЪЧВЛзМШЗЕФЁЃЃЈдЊЦїМўЕФЪЙгУЪЧзюЛљБОжЊЪЖЃЌашвЊАбетСНИіДЋИаЦїЕФЪЙгУЯШИуУїАзЃЌУїАзНЧЖШОпЬхЪЧдѕУДМЦЫуГіРДЕФЃПЃЉ
ТЫВЈЫуЗЈЃЈЪ§ОнДІРэЃЉ
етИіЪБКђВХгаЮвУЧГЃЫЕЕФПЈЖћТќТЫВЈЁЂЛЅВЙТЫВЈЕФЕЧГЁЃЌКмЖрШЫдкЩшМЦЙ§ГЬжазмЪЧОѕЕУПЈЖћТќЛђепЛЅВЙТЫВЈЪЧКмИпЖЫЕФЖЋЮїЃЌЪгЯпШЋБЛЫќУЧУЩБЮСЫЃЌЪЕМЪЩЯЫќУЧзюжеЕФФПЕФШдШЛЪЧЕУЕНзюзМШЗЕФНЧЖШЦЋРыжЕЁЃЖдгкетвЛФПБъЃЌДЋИаЦїЕФадФмЁЂЕчТЗЩшМЦЭЌбљКмживЊЕФЁЃ
ЦфЪЕзїЮЊгІгУЃЌЮвУЧжЛашжЊЕРЁАПЈЖћТќТЫВЈЁБЪфШыЕФСНИіСПЃЌвЛИіЪЧВтСПжЕЃЌвЛИіЪЧдЄВтжЕЃЌГЬађЖМЪЧГЩаЭЕФЃЌжиЕуЪЧдкВЮЪ§ЕФЕїЪдЩЯЁЃећИіЫуЗЈжагАЯьЪфГіЕФОЭЪЧKgЕФжЕЃЌПЩвдМђЕЅЕФРэНтЮЊвЛжжМгШЈааЮЊЃЌЯраХЫИќЖрвЛЕуЖјвбЁЃећИіЕїЪдЙ§ГЬгаШ§ИіВЮЪ§ашвЊЕїећЃЌQ?
R? МАФЧИі0.0235 ЁЃОпЬхЕФЕїЪдЃЌФПЧАЛЙЫЕВЛЧхГўЃЌЭљЭљЫуЗЈЕФЕїЪдЖМЪЧОбщЃЌГЂЪдЖрСЫОЭгаЙцТЩСЫЃЌашвЊдйАбетжжОбщИјРэТлЛЏМђЕЅУшЪіГіРДЁЃ
volatile float
QingJiao = 0;? //зюжезМШЗНЧЖШЪфГіБфСПЖЈвх
volatile float Gyro_Data = 0; //ЭгТнвЧ
float Q =1, R =3900;??? //ЕїећПЈЖћТќЕФжЭКѓ 3900?
static float RealData = 0,RealData_P =10000;
float NowData = 0,NowData_P =0 ;
float Kg = 0,gyroscope_rate = 0,gyroscope_rat
= 0,accelerometer_angle;
volatile float gyroscope_angle=0//гУПЈЖћТќТЫВЈЪБВЛгУДЫБфСП
int? Gyro1_zero=0;
void kalman_update(void)
{
if(zeroflag>1000)?? //гыПЊЛњздМьгаЙиЃЌУЛгУЕНЕФПЩвдЩОШЅ?????
{zeroflag=1001;? //ШЗБЃzeroflagВЛЛсвчГі
Acc_z = Acc_z - 28850;????? //МгЫйЖШМЦВЩМЏЕФADжЕМѕШЅжБСЂЪБЕФЪфГіжЕ
Gyro1_zero=zerosub/1000;?? //ЭгТнвЧПЊЛњздМьРлМг1000ДЮКѓШЁОљжЕ
ЕУЕНЭгТнвЧСуЦЋжЕ
Gyro1? = Gyro1?- Gyro1_zero;? //ЭгТнвЧADВЩМЏжЕМѕШЅЭгТнвЧСуЦЋжЕ????????
Gyro_Data = Gyro1;?
accelerometer_angle=??? Acc_z*180/(47915.71-12843.7);???
//МгЫйЖШМЦМЦЫуГіЕФНЧЖШ ЙщвЛЛЏЕН-90 ЕН+90
gyroscope_rate = Gyro1*0.0235*0.005;? //0.0235
ЪЧзЊЛЛНЧЖШЕФБШР§жЕ 0.005ЪЧПижЦжмЦк
gyroscope_rat =gyroscope_rat-Gyro1*0.0235*0.005;????
//Л§ЗжНЧЫйЖШЕУЕННЧЖШ
//ПЈЖћТќЮхИіЙЋЪНЕФЫуЗЈЪЕЯж
NowData = RealData-gyroscope_rate;
NowData_P = Q+RealData_P;
Kg = NowData_P/(NowData_P+R);
RealData = NowData +Kg*(accelerometer_angle -
NowData);
RealData_P =(1-Kg)*NowData_P;
QingJiao =? RealData;???//НЋзМШЗНЧЖШНсЙћИјQingJiao
}
}
|
МйШчвбОЕУЕНзМШЗНЧЖШЃЌздШЛЪЧПЊЪМвдДЫзїЮЊПижЦСПЃЌФЧЮвУЧвЊПижЦГЩЩЖбљЃПЯывЛЯывВжЊЕРЪЧвЊАбетИіНЧЖШжЕПижЦГЩ0ЖШЃЈР§ШчЃКНЋжБСЂЪБЖЈвхЮЊ0ЖШЃЉЃЌФЧУДздШЛЪЙгУГЃгУЕФPIDЫуЗЈЃЌЦЋВюздШЛОЭЪЧQingJiao-0=QingJiaoЃЌЕБШЛвВПЩвдЗДЙ§РДЃЌетИљОнздМКЖдЗНЯђЕФЖЈвхЁЃЮвУЧРДИізюМђЕЅЕФЮЛжУЪНPDЫуЗЈЃК
fValue = (float) P * QingJiao - (float)
D*Gyro _ Data;
PОЭЪЧPIDЕФPВЮЪ§ DОЭЪЧPIDЕФDВЮЪ§ЃЌQingJiaoЗДгГЗљЖШЃЌGyro_DataЗДгГПьТ§ЁЃЃЈетвВашвЊВЛЖЯЕїЪдГіРДЕФЁЃЃЉдйАбfvalueжЕИјЦНКтГЕЕФжБСїЕчЛњЕФПижЦЕїЫйPWMЪфГіОЭПЩвдСЫЁЃ
ЪЕМЪдкзіЕФЪБКђЃЌЭљЭљУЛФЧУДМђЕЅЃЌЫљвдвЛЖЈвЊвЛВНвЛВНзіКУжЎКѓдйзіКѓУцЕФЃЌМйШчФуЕкЖўВПУЛзіКУЃЌдкЕкШ§ВПЪБФудѕУДвВжБСЂВЛЦ№РДЃЌФуВЛжЊЕРЕНЕзЪЧPDВЮЪ§ВЛЖдЃЌЛЙЪЧПЈЖћТќГіРДЕФНЧЖШБОЩэВЛзМЁЃЫљвдИіШЫОбщЃКЕУЕНзМШЗНЧЖШЪЧећИіЙ§ГЬжСЙиживЊЕФвЛВНЁЃЦНКтГЕЕФжБСЂЪЧвЛжБЪЧвЛИіЖЏЬЌЙ§ГЬЃЌМДЪЙзюКУЕФзДЬЌвЛЖЏВЛЖЏЃЌвВЪЧдкЖЏЬЌПижЦжаЃЌжЛЪЧПДВЛГіЖјвбЁЃетРяжЛеыЖджБСЂПижЦЃЌМДзюЛљБОЕФздЦНКтЁЃ
6жсКЭ9жсДЋИаЦїЃКЙпадВтСПЕЅдЊ КЭКНзЫВЮПМЯЕЭГ
IMU(Inertial measurement unit? )
КЭ AHRS ( Attitude and heading reference system )
2016Фъ2дТ19Ше
дкбаОПММЪѕЮЪЬтжЎЧАЃЌЮвВЂВЛЙиаФетаЉДЋИаЦїЕФЯИНкЃЌЕЋвЊЩЯаТЕФВњЦЗЁЂашвЊИќаТЕФММЪѕЕФЪБКђЃЌЪаГЁЩЯевШЫВЛЪЧвЛМўШнвзЕФЪТЧщЁЃ
гыЦфЕШЙЄГЬЪІЖМЛсЕФЪБКђЃЌПЩФмФуЕФВњЦЗвВУЛЪВУДОКељСІСЫЁЃЮоФЮЃЌздМКИњзХВЮгыАЩЁЃ
ОЭЫуЩйЪ§ШЫЛсЪЙгУаТММЪѕЃЌФувВашвЊгазуЙЛЕФШЫМЪММЧЩЃЌЦфЪЕВЛФмЫЕЪЧММЧЩЃЌгІИУЪЧвЛЬзЗНЗЈТлРДЭХНсФуЕФУЫгбЃЌБШШчЙВЭЌЕФРэЯыЃЈЖдЮДРДЕФдЄМћЃЉЁЂаЕївЛжТЕФФПБъЁЂМлжЕЙлМАвЛжТааЖЏзМдђЁЃетаЉдЖдЖвЊБШБрГЬЩшМЦИДдгЃЌгаЪБКђЮвдкЯыТэдЦецЕФЪЧЗЧГЃРїКІЕФШЫЮяЃЌФмЭХНс18ТоККдкЯрЕБГЄЕФЪБМфРяЃЌЬ§ЫћЕФЁБЙэЛАЁАЃЌБЛЫћЁБКігЦЁАЃЌетЪЧашвЊдѕбљЕФвЛЬзЗНЗЈФиЃЁЯыЯыЕБЯТЃЌШчЙћФувЊЭХНсвЛХњШЫЃЌЪЧЗЧГЃВЛШнвзЕФЁЃ
бдЙще§ДЋЃЌВЛЙмЪВУДIMUЛђAHRSЖдЮвРДЫЕЖМЪЧДЋИаЦїЪ§СПКЭНсЙЙЕФЮЪЬтЃЌЕЋвЊВЩгУЧАШЫЕФГЩЙћЃЌОЭЕУДѓМвЫЕвЛбљЕФЛАЃЌОЭЪЧетаЉзЈвЕЪѕгяЁЃ
AHRSгЩМгЫйЖШМЦЃЌДХГЁМЦЃЌЭгТнвЧЙЙГЩ
AHRSЕФЪфГіжаЕФОјЖдЗНЯђРДздгкЕиЧђЕФжиСІГЁКЭЕиЧђЕФДХГЁЃЌгШЦфЪЧДХГЁ
ОВЬЌжеОЋЖШШЁОігкЖдДХГЁЕФВтСПОЋЖШКЭЖджиСІЕФВтСПОЋЖШ ,ЖјдђЭгТнОіЖЈСЫЫћЕФЖЏЬЌадФмЁЃ
ДХГЁКЭжиСІГЁдНе§НЛЃЌдђКНзЫВтСПаЇЙћдНКУЃЛЗДжЎЃЌШчЙћДХГЁКЭжиСІГЁЦНааСЫЃЌБШШчдкЕиДХФЯББМЋЃЌетРяЕФДХГЁЪЧЯђЯТЕФЃЌМДКЭжиСПГЁЗНЯђЯрЭЌСЫЁЃ
етЪБКНЯђНЧЪЧУЛЗЈВтГіЕФЃЌетЪЧКНзЫЯЕЭГЕФШБЯнЁЃдкИпЮГЖШЕФЕиЗНКНЯпНЧЮѓВюЛсдНРДдНДѓЁЃЕБШЛЃЌдкЪЕМЪЗЧКНЬьМЖЕФгІгУжаКмЩйгіЕНетжжЧщПіЃЌЙЪДЫЖЮжЛЪЧЮЊСЫЁБжЊЦфЫљвдШЛЁАПЩТдШЅЁЃ
ЯћЗбМЖЭгТнвЧКЭМгЫйЖШМЦЕФдыЩљЯрЖдРДЫЕКмДѓЃЌ
вдЦНУцЭгТнЮЊР§гУADIЕФЭгТнвЧНјааЛ§ЗжвЛЗжжгЛсЦЏвЦ2ЖШзѓгвЃЌетжжЧАЬсЯТШчЙћУЛгаДХГЁКЭжиСІГЁРДаЃе§Ш§жсЭгТнЕФЛАЃЌ
ФЧУДЛљБОЩЯ3ЗжжгвдКѓЮяЬхЕФЪЕМЪзЫЬЌКЭВтСПЪфГізЫЬЌОЭЭъШЋБфбљСЫЃЌЫљвдЃЌЕЭМлЭгТнвЧКЭМгЫйЖШМЦЕФМмЙЙЯТБиаыдЫгУГЁЯђСПРДНјаааое§ЁЃ
AHRSРћгУШ§ЮЌЕФЭгТнвЧРДПьЫйИњзйБЛВтЮяЬхЕФШ§ЮЌЕФзЫЬЌЃЌЫќвдЭгТнвЧЮЊКЫаФЃЌЭЌЪБвВВтСПМгЫйЖШКЭЕиДХГЁЕФЗНЯђЮЊЯЕЭГЬсЙЉПЩППЕФВЮПМЁЃ
ОпЬхВтСПдиЬхШ§ИіЗНЯђЕФЕФОјЖдНЧЫйТЪЁЂМгЫйЖШвдМАДХГЁЧПЖШЃЌВЂВЩгУЬиЖЈзЫЬЌНтЫуЗНЗЈКЭПЈЖћТќТЫВЈаХЯЂШкКЯЕУЕНдиЬхЕФЫФдЊЪ§ЁЂзЫЬЌЪ§ОнЕШЁЃ
ашвЊЪЕЪБЕФМЏГЩЫуЗЈЮЊЯЕЭГЬсЙЉзМШЗЃЌПЩППЃЌМАЪБвдМАЮШЖЈЕФзЫЬЌЪфГіЁЃ
ДгЭгТнвЧЁЂМгЫйЖШМЦЁЂДХСІМЦвдМАФкВПЮТЖШДЋИаЦїЕУЕНЕФЪ§ОнЃЌШЋВПБЛДЋЪфЕНЧЖШыЪНЯЕЭГ-MCUжаЁЃ
MCUвРОнЬиЖЈЕФЫуЗЈвдМАДцДЂдкFlashДцДЂЦїжаЕФБъЖЈЪ§ОнДІРэРДздДЋИаЦїЕФдЪМЪ§ОнЃЌ
зїЮЊЦфЛљБОЫуЗЈЃЌКНзЫВЮПМЯЕЭГЃЈAHRSЃЉВЩгУздЪЪгІПЈЖћТќТЫВЈЫуЗЈЃЌздЖЏЕїећВЂЪЪгІВЛЖЯБфЛЏЕФЖЏЬЌЬѕМўЃЌЮоашЭтВПШЫЮЊЕФИЩдЄЁЃ
ВњЦЗОљдкЬиЖЈЕФЛЗОГЪЕбщЬѕМўЯТЃЌВЮПМвбжЊЮТЖШЯТЕФМгЫйЖШЁЂНЧЫйТЪКЭДХГЁНјааШЋУцЕФБъЖЈЃЌВЂНЋБъЖЈЪ§ОнЪфШыУПИіВњЦЗжаЁЃ
|