简介
通常来说,Python不是一种高性能的语言,在某种意义上,这种说法是真的。但是,随着以Numpy为中心的数学和科学软件包的生态圈的发展,达到合理的性能不会太困难。
当性能成为问题时,运行时间通常由几个函数决定。用C重写这些函数,通常能极大的提升性能。
在本系列的第一部分中,我们来看看如何使用NumPy的C API来编写C语言的Python扩展,以改善模型的性能。在以后的文章中,我们将在这里提出我们的解决方案,以进一步提升其性能。
文件
这篇文章中所涉及的文件可以在Github上获得。
模拟
作为这个练习的起点,我们将在像重力的力的作用下为N体来考虑二维N体的模拟。
以下是将用于存储我们世界的状态,以及一些临时变量的类。
# lib/sim.py
class World(object):
"""World is a structure that holds the state of N bodies and
additional variables.
threads : (int) The number of threads to use for multithreaded
implementations.
STATE OF THE WORLD:
N : (int) The number of bodies in the simulation.
m : (1D ndarray) The mass of each body.
r : (2D ndarray) The position of each body.
v : (2D ndarray) The velocity of each body.
F : (2D ndarray) The force on each body.
TEMPORARY VARIABLES:
Ft : (3D ndarray) A 2D force array for each thread's local storage.
s : (2D ndarray) The vectors from one body to all others.
s3 : (1D ndarray) The norm of each s vector.
NOTE: Ft is used by parallel algorithms for thread-local
storage. s and s3 are only used by the Python
implementation.
"""
def __init__(self, N, threads=1,
m_min=1, m_max=30.0, r_max=50.0, v_max=4.0, dt=1e-3):
self.threads = threads
self.N = N
self.m = np.random.uniform(m_min, m_max, N)
self.r = np.random.uniform(-r_max, r_max, (N, 2))
self.v = np.random.uniform(-v_max, v_max, (N, 2))
self.F = np.zeros_like(self.r)
self.Ft = np.zeros((threads, N, 2))
self.s = np.zeros_like(self.r)
self.s3 = np.zeros_like(self.m)
self.dt = dt |
在开始模拟时,N体被随机分配质量m,位置r和速度v。对于每个时间步长,接下来的计算有:
合力F,每个体上的合力根据所有其他体的计算。
速度v,由于力的作用每个体的速度被改变。
位置R,由于速度每个体的位置被改变。
第一步是计算合力F,这将是我们的瓶颈。由于世界上存在的其他物体,单一物体上的力是所有作用力的总和。这导致复杂度为O(N^2)。速度v和位置r更新的复杂度都是O(N)。
如果你有兴趣,这篇维基百科的文章介绍了一些可以加快力的计算的近似方法。
纯Python
在纯Python中,使用NumPy数组是时间演变函数的一种实现方式,它为优化提供了一个起点,并涉及测试其他实现方式。
# lib/sim.py
def compute_F(w):
"""Compute the force on each body in the world, w."""
for i in xrange(w.N):
w.s[:] = w.r - w.r[i]
w.s3[:] = (w.s[:,0]**2 + w.s[:,1]**2)**1.5
w.s3[i] = 1.0 # This makes the self-force zero.
w.F[i] = (w.m[i] * w.m[:,None] * w.s / w.s3[:,None]).sum(0)
def evolve(w, steps):
"""Evolve the world, w, through the given number of steps."""
for _ in xrange(steps):
compute_F(w)
w.v += w.F * w.dt / w.m[:,None]
w.r += w.v * w.dt |
合力计算的复杂度为O(N^2)的现象被NumPy的数组符号所掩盖。每个数组操作遍历数组元素。
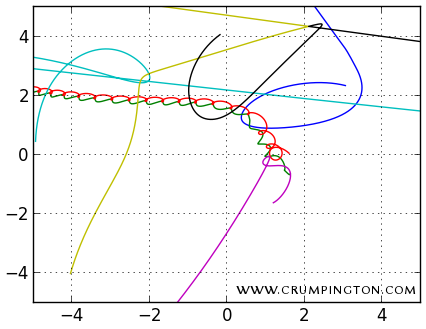
可视化
这里是7个物体从随机初始状态开始演化的路径图:
性能
为了实现这个基准,我们在项目目录下创建了一个脚本,包含如下内容:
import lib
w = lib.World(101)
lib.evolve(w, 4096) |
我们使用cProfile模块来测试衡量这个脚本。
python -m cProfile -scum bench.py |
前几行告诉我们,compute_F确实是我们的瓶颈,它占了超过99%的运行时间。
428710 function calls (428521 primitive calls) in 16.836 seconds
Ordered by: cumulative time
ncalls tottime percall cumtime percall filename:lineno(function)
1 0.000 0.000 16.837 16.837 bench.py:2(<module>)
1 0.062 0.062 16.756 16.756 sim.py:60(evolve)
4096 15.551 0.004 16.693 0.004 sim.py:51(compute_F)
413696 1.142 0.000 1.142 0.000 {method 'sum' ...
3 0.002 0.001 0.115 0.038 __init__.py:1(<module>)
... |
在Intel i5台式机上有101体,这种实现能够通过每秒257个时间步长演化世界。
简单的C扩展 1
在本节中,我们将看到一个C扩展模块实现演化的功能。当看完这一节时,这可能帮助我们获得一个C文件的副本。文件src/simple1.c,可以在GitHub上获得。
关于NumPy的C API的其他文档,请参阅NumPy的参考。Python的C
API的详细文档在这里。
样板
文件中的第一件事情是先声明演化函数。这将直接用于下面的方法列表。
static PyObject *evolve(PyObject *self, PyObject *args); |
接下来是方法列表。
static PyMethodDef methods[] = {
{ "evolve", evolve, METH_VARARGS, "Doc string."},
{ NULL, NULL, 0, NULL } /* Sentinel */
}; |
这是为扩展模块的一个导出方法列表。这只有一个名为evolve方法。
样板的最后一部分是模块的初始化。
PyMODINIT_FUNC initsimple1(void) {
(void) Py_InitModule("simple1", methods);
import_array();
} |
另外,正如这里显示,initsimple1中的名称必须与Py_InitModule中的第一个参数匹配。对每个使用NumPy
API的扩展而言,调用import_array是有必要的。
数组访问宏
数组访问的宏可以在数组中被用来正确地索引,无论数组被如何重塑或分片。这些宏也使用如下的代码使它们有更高的可读性。
#define m(x0) (*(npy_float64*)((PyArray_DATA(py_m) + \
(x0) * PyArray_STRIDES(py_m)[0])))
#define m_shape(i) (py_m->dimensions[(i)])
#define r(x0, x1) (*(npy_float64*)((PyArray_DATA(py_r) + \
(x0) * PyArray_STRIDES(py_r)[0] + \
(x1) * PyArray_STRIDES(py_r)[1])))
#define r_shape(i) (py_r->dimensions[(i)]) |
在这里,我们看到访问宏的一维和二维数组。具有更高维度的数组可以以类似的方式被访问。
在这些宏的帮助下,我们可以使用下面的代码循环r:
for(i = 0; i < r_shape(0); ++i) {
for(j = 0; j < r_shape(1); ++j) {
r(i, j) = 0; // Zero all elements.
}
} |
命名标记
上面定义的宏,只在匹配NumPy的数组对象定义了正确的名称时才有效。在上面的代码中,数组被命名为py_m和py_r。为了在不同的方法中使用相同的宏,NumPy数组的名称需要保持一致。
计算力
特别是与上面五行的Python代码相比,计算力数组的方法显得颇为繁琐。
static inline void compute_F(npy_int64 N,
PyArrayObject *py_m,
PyArrayObject *py_r,
PyArrayObject *py_F) {
npy_int64 i, j;
npy_float64 sx, sy, Fx, Fy, s3, tmp;
// Set all forces to zero.
for(i = 0; i < N; ++i) {
F(i, 0) = F(i, 1) = 0;
}
// Compute forces between pairs of bodies.
for(i = 0; i < N; ++i) {
for(j = i + 1; j < N; ++j) {
sx = r(j, 0) - r(i, 0);
sy = r(j, 1) - r(i, 1);
s3 = sqrt(sx*sx + sy*sy);
s3 *= s3 * s3;
tmp = m(i) * m(j) / s3;
Fx = tmp * sx;
Fy = tmp * sy;
F(i, 0) += Fx;
F(i, 1) += Fy;
F(j, 0) -= Fx;
F(j, 1) -= Fy;
}
}
}
|
请注意,我们使用牛顿第三定律(成对出现的力大小相等且方向相反)来降低内环范围。不幸的是,它的复杂度仍然为O(N^2)。
演化函数
该文件中的最后一个函数是导出的演化方法。
static PyObject *evolve(PyObject *self, PyObject *args) {
// Declare variables.
npy_int64 N, threads, steps, step, i;
npy_float64 dt;
PyArrayObject *py_m, *py_r, *py_v, *py_F;
// Parse arguments.
if (!PyArg_ParseTuple(args, "ldllO!O!O!O!",
&threads,
&dt,
&steps,
&N,
&PyArray_Type, &py_m,
&PyArray_Type, &py_r,
&PyArray_Type, &py_v,
&PyArray_Type, &py_F)) {
return NULL;
}
// Evolve the world.
for(step = 0; step< steps; ++step) {
compute_F(N, py_m, py_r, py_F);
for(i = 0; i < N; ++i) {
v(i, 0) += F(i, 0) * dt / m(i);
v(i, 1) += F(i, 1) * dt / m(i);
r(i, 0) += v(i, 0) * dt;
r(i, 1) += v(i, 1) * dt;
}
}
Py_RETURN_NONE;
}
|
在这里,我们看到了Python参数如何被解析。在该函数底部的时间步长循环中,我们看到的速度和位置向量的x和y分量的显式计算。
性能
C版本的演化方法比Python版本更快,这应该不足为奇。在上面提到的相同的i5台式机中,C实现的演化方法能够实现每秒17972个时间步长。相比Python实现,这方面有70倍的提升。
观察
注意,C代码一直保持尽可能的简单。输入参数和输出矩阵可以进行类型检查,并分配一个Python装饰器函数。删除分配,不仅能加快处理,而且消除了由Python对象不正确的引用计数造成的内存泄露(或更糟)。
|






