| 编辑推荐: |
| 本文从“电力系统”,“热管理”和“低温驾驶性改善策略”等方面,介绍VCU中提高车辆运行的安全性和舒适性的几块功能。希望对你的学习有帮助。文章来自联合电子,由火龙果软件Jane编辑推荐。
|
|
支持 Reset后可自动恢复行驶状态的电管理功能
VCU协调的部件很多,其中很多是高压电力部件。因此VCU主要的工作之一是负责高低/压电力系统的控制。包括:高压上/下电协调、高压功率分配和限制、高压部件信息处理(包含D/R挡切换时的电机四象限映射),以及部件的诊断和保护功能。电力系统的稳定性和安全性很大程度的决定了整车的运行状况。
对于电子控制器来说,在整个生命周期内很难避免完全不发生复位,比如VCU自身内部导致的硬件复位、软件复位,以及外部干扰导致的复位等。虽然复位时间很短(比如软件复位,发生复位到恢复通讯大概不到0.2s),但如果在有些场景(如高速行驶时)复位后不能尽快自动恢复之前的状态,则车辆会失去动力,进而可能会给驾驶员带来非常大的安全隐患。
特别是对于整车控制器VCU,很多动力相关的部件都受其控制。并且在正常情况下,如果要进入行车就绪状态,一般需要至少两个不同的操作(如踩刹车、按启动按钮、换挡等);而一旦在高速工况下出现了控制器复位,很多复位前储存的信号会被初始化,此时如果仍需要驾驶员两个连续不同操作,则可能出现非期望的减速,甚至造成追尾事故。
为此,联合电子开发了一种新能源整车控制器软件复位后动力自动恢复的控制功能(图1),该功能通过识别到控制器发生了软件复位,然后根据复位后车辆的状态,决定是否需要恢复车辆复位前的状态,实现在尽可能保证安全的前提下,自动恢复到复位前的状态。
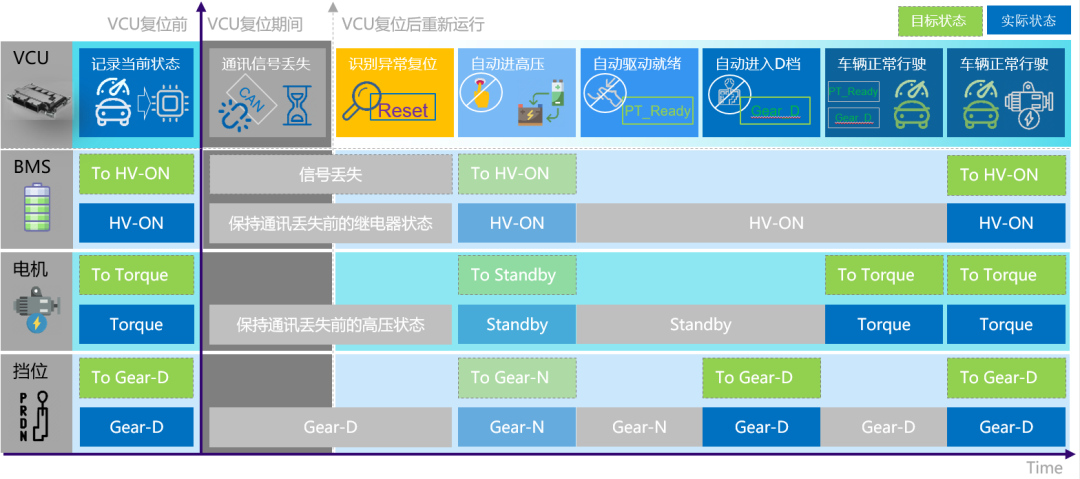
图1 VCU 复位后自动恢复可行驶状态
上述方案经过实车测试,在VCU发生复位后约0.11s后恢复通讯,该功能可以在0.19s内自动恢复高压状态,0.25s后自动恢复整车驱动就绪状态,0.38s后自动恢复D挡并完成整个恢复过程。不需要驾驶员任何操作,整车恢复正常行驶状态且没有发生长时间动力丢失的现象(图2)。
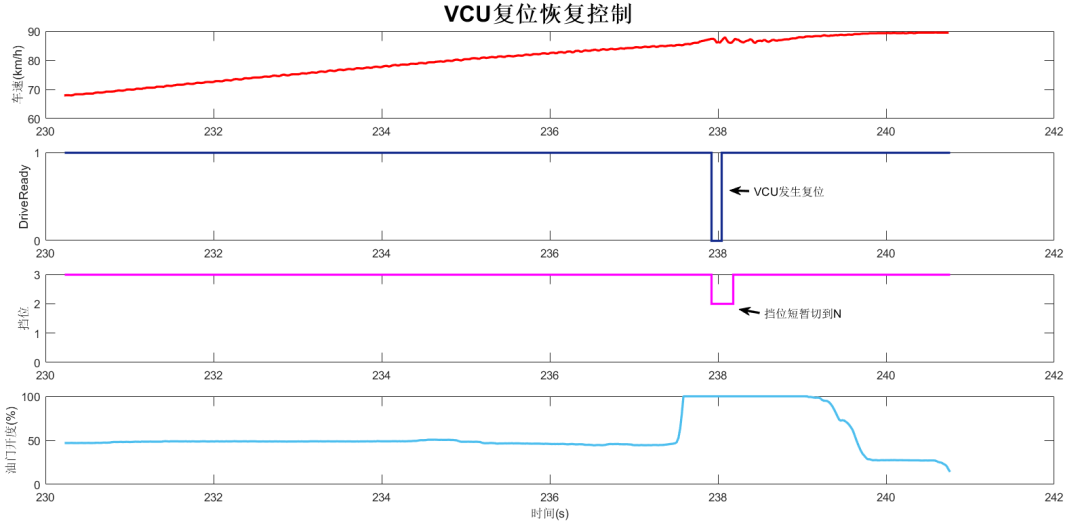
图2 VCU 复位后自动恢复可行驶状态实测效果
支持多种协议的VCU充电主控功能
充电控制功能负责识别不同模式的充电需求,根据不同的模式选择对应充电控制过程。与供电设备(EVSE)、动力电池BMS等充电相关部件协调交互,实现充电使能条件判断,充电过程监控,充电结束条件判断等功能。开发的软件不仅能实现支持国标交流/直流充电协议,也能满足欧洲和北美的联合充电系统(CCS)以及日本CHAdeMO充电协议(图3)。为了解决充电设备的兼容性和充电时长难以满足电动车车主的需求,软件也实现了超级充电标准的充电控制功能。

图3 充电控制软件架构
剩余充电时间是指电动车开始充电到充电结束所花费的时间,充电时间随着车辆电量增多逐渐减小。剩余充电时间估算功能要求车辆在充电开始阶段就能准确预测整个充电过程所花费的时间,但电动车充电过程中,充电时间受电芯特性、充电策略、桩输出能力、整车热管理和SOX估算精度等多个因素的影响,因此,高精度的剩余充电时间估算一直是行业难题。
联合电子采用的是一种基于充电工况动态修正的自适应剩余充电时间估算算法,该算法将充电过程分为低电压预充电,恒流充电和恒压充电三个阶段,算法根据每一阶段的充电特征,分别估算各阶段充电时间,然后累加求和得出总时间。在恒流充电阶段,可以根据客户需求配置基于电芯电压或SOC阶梯式充电策略的充电时间估算。
在充电过程中,算法通过增加充电桩输出能力修正因子来预测未来充电桩最大输出电流。对于高低温工况,除了在充电开始前计算电池预热、预冷时间外,充电时间算法在充电过程中也会基于电池热模型和电池包热管理策略,预测未来电池温度,进而确定电池未来的充电电流。对于充电末端,由于SOC精度造成充电时间偏差,算法增加基于单体电压的充电时间倒计时算法以提高末端充电时间估算精度(图4)。

图4 直流充电剩余时间计算实测效果
支持充电预热的中低温回路热管理控制
热管理控制功能可以协调来自于电池、电机、发动机和驾驶舱等的加热或冷却需求(图5),结合整车模式来决策和切换热管理控制模式,进而控制各子系统准确的响应各种来源的热管理需求。开发的软件可以适用于纯电和混动项目中的多种热管理拓扑结构。

图5 VCU热管理需求来源
为了提升低温环境下车辆上电后快速达到电池合适的运行状态,开发的电池远程预热功能可以结合驾驶员的出行时间、电池状态、充电状态以及整车能量状态对电池进行预热,在驾驶员用车时使电池性能达到最优状态。方案引入了一次唤醒计算预热时间和二次唤醒执行预热的概念,并且在驾驶舱有预调节需求时,引入特定的电管理和能量协调方案,进而实现能耗、电池性能、驾驶舱舒适性最优。
充电预热控制可以实现用户在低温插枪充电时,根据电池的预热请求,控制电池处于预热模式。在充电机输出能力范围内,由充电机输出功率通过电池加热器(PTC)对电池加热。因为在充电预热模式下,电池的主继电器在断开状态,能确保电池不会有电流输入或输出,确保不会对低温条件下的电池造成损坏。当电池被加热到合适温度后,再控制电池退出预热模式进入正常的充电模式。方案实现了在低温下给电池充电有效保护电池的同时,缩短充电时间,给用户带来更好的充电体验(图6)。

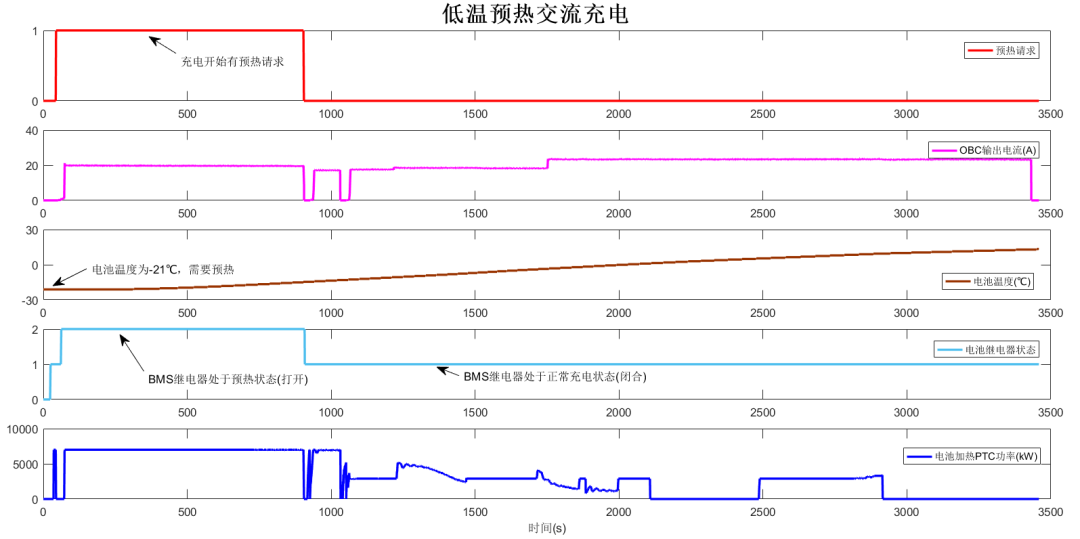
图6 低温交流充电预热实测效果
低温环境兼顾功率保护和驾驶性改善策略
在电池温度很低时电池的充放电功率受限,行车过程中会经常用到电池的功率边界。当整个系统在功率边界附近运行时,会非常容易导致电池过充或过放发生。此时系统会进行快速闭环调节以把电池功率调整到正常范围内,但这会导致驾驶性变得很差。因此如何在低温环境下同时兼顾功率边界保护和可接受的驾驶性两方面一直是行业的有个难题。
尤其对于多电机串并联四驱拓扑结构,各个电机实际功率都会相互影响彼此的功率边界,是一个相互影响的多层闭环控制,某一个高压部件功率抖动都会影响其他部件的抖动(图7)。因此,在极低温度时电池输入输出功率受限,并且拓扑结构中存在多电机耦合时,更容易造成电池过充过放以及驾驶性抖动。
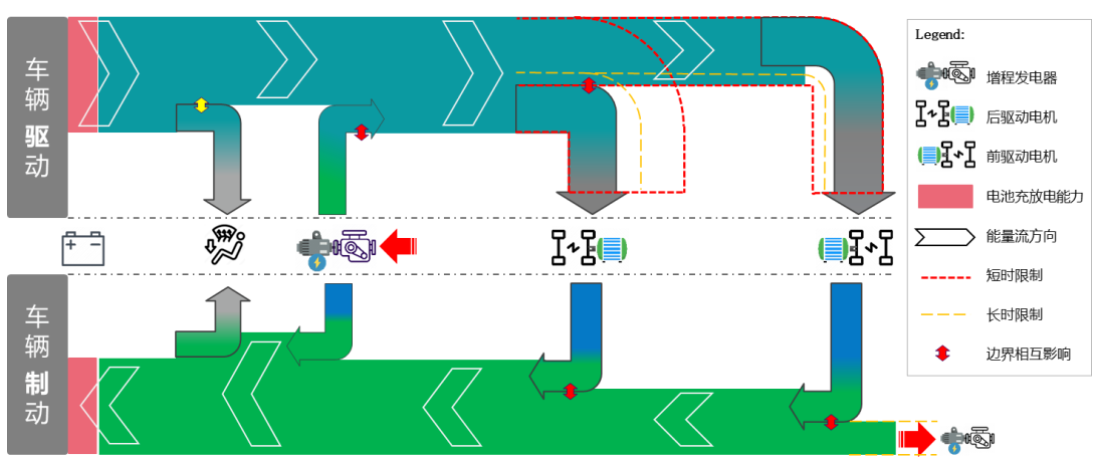
图7 多电机串并联四驱拓扑功率边界影响示意图
针对多电机耦合的混动系统,通过大量策略优化以及低温驾驶性试验验证对比,软件将电池长时功率进行动态边界调节,在扭矩结构以及模式切换过程中,用电机长时扭矩边界对驾驶员驱动需求进行限制,用电机短时扭矩边界对类似ESP干涉、发动机启动预留等扭矩需求进行限制,保证满足驾驶需求的同时,不会出现电池过充过放的情况。通过电池功率预测,电池限制功率闭环调节,以及预测功率变化趋势提前收窄或放宽功率限制边界等方式。很好的解决了低温环境下兼顾功率保护和驾驶性的效果(图8)。

图8 功率闭环保护功能框架
以低温环境下起步全油门加速工况为例,通过上述软件优化措施,当低温工况发电机实际功率波动情况下,也可以保证电池功率不过放,并且前后电机准确响应扭矩边界限制,避免驾驶抖动的发生(图9)。

图9 低温全油门加速驾驶性实测效果
故障诊断和响应
新能源汽车的动力和高压部件比传统车多很多,车辆可能发生的故障类型和数量以及不同场景下(驻车、充电、行车等)的故障发生后的后处理的方式也很多。故障诊断的及时性、故障后处理的合理性对驾驶员的驾驶体验和车辆安全性都有很大的影响。
基于对整车所有驱动部件的700多个故障原因和影响梳理,结合整车可能的故障响应方式,软件针对不同场景下发生故障的严重性,设计了多个等级的故障响应方式。在确保车辆安全的前提下,尽可能做到了驾驶体验的友好性。此外VCU作为整车OBD的主控制器,根据法规实现了不同部件发生故障发生后的亮灯需求协调和故障提示功能(图10)。
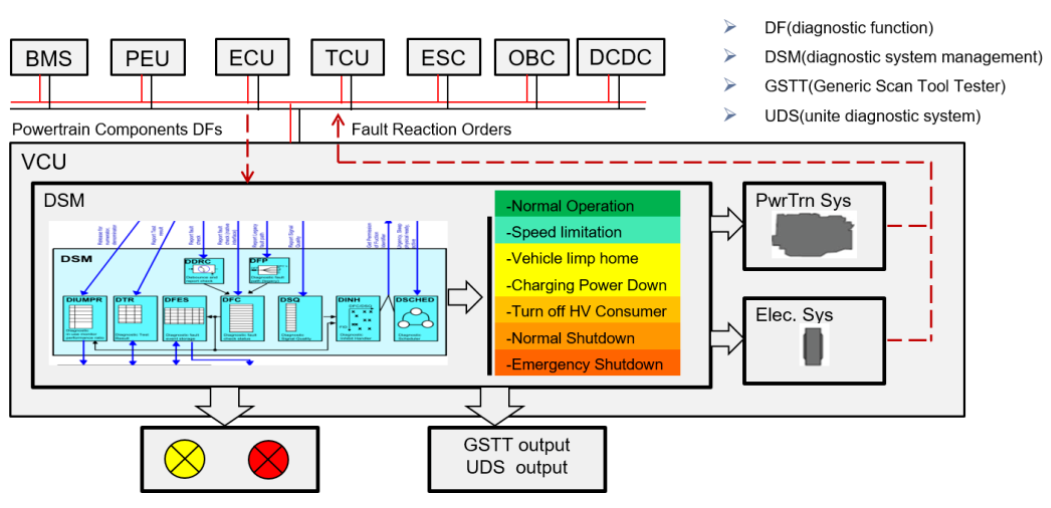
图10 故障诊断和响应功能框架 |







 订阅
订阅