| 编辑推荐: |
本文主要
介绍主数据集 和 传感器数据集
,并通过对数据集的分析,发现这些由传感器真实采集的数据受多重因素干扰,希望对你的学习有帮助。
本文来自于CSDN的博主:-cyc头发还挺多的,由Alice编辑、推荐。 |
|
背景
了解ADS-B报文系统工作原理的都知道该系统是一种开放型的系统,只要有接收机任何人都能接收ADS-B报文,因此存在数据被篡改的风险。于是想出了一种仅使用ADS-B报文的信号强度(而非报文具体内容)通过神经网络预测飞机坐标的方法。该方法通过牺牲一定的预测准确性来换取预测可靠性(因为信号强度不易被篡改,但携带信息有限)。可用于飞行器搜救(飞行器遇难前ADS-B报文系统很有可能已被篡改,由ADS-B系统获得的定位可能是虚假定位)等领域。
项目来源
项目来自于OpenSky发布在AIcrowd上的任务:Aircraft Localization Competition(有梯子更快) (该竞赛已经完赛,公开了一些优秀的飞行器定位方案可以学习)
本文的目标与该竞赛的目标不同,本文仅使用该竞赛提供的数据集。
数据集
本文共涉及两个数据集:主数据集 和 传感器数据集。
数据集标签解释
点击此处查看官方给出的标签解释原文。

图1 主数据集
id:表示该条数据在该数据集中的收集顺序编号。
timeAtServer(时间戳):以秒为单位,指OpenSky的服务器接收信息时间。 在每个1h主数据集中(官方提供了8个主数据集,每个数据集的搜集时间均为1小时),此时间戳从0开始,截止至3600秒,此时间戳具有毫秒精度(在传播延迟、处理延迟和网络延迟之后确定的)。
Aircraft(航班号):每个主数据集中每个飞行器唯一的标识符(如:主数据集1中Aircraft 为123的飞行器与数据集2中Aircraft 为123的飞行器不是相同的飞行器,即不同数据集的数据无法合并)。
Latitude/longitude/geoAltitude(飞行器纬度/经度/地理高度):由飞行器报告的当前位置坐标。纬度和经度以十进制度数(WGS84)表示,geoAltitude以米为单位。这些位置信息的准确性通常是未知的(有些飞行器会发送来自其内部系统而非GPS传感器的位置信息,在这种情况下,位置信息可能会漂移,甚至可能会相差几百米,但是这种情况很少见),但是大多数飞行器都以适当的精度(10米的精度)报告其位置。
baroAltitude(飞行器气压高度):飞行器报告的气压高度(以米为单位)。气压高度取决于天气,可能与几何高度相差数百米,但是可以从“已知”飞行器上获悉差异,然后可以使用此信息估算几何高度或估算边界。
numMeasurements(应答传感器数量):捕获到该飞行器信号的地面传感器数量。
Measurements(传感器测量数据):每个捕获到该飞行器信号的地面传感器的测量数据。测量数据由包含三元组的JSON数组字符串表示。每个三元组包含:报告测量数据的传感器的全局唯一序列号、信号到达接收器的时间戳(以纳秒为单位)和接收信号强度指示器(RSSI)。RSSI的确切定义取决于接收器的类型,以dB为单位。纳秒级时间戳的精准度也取决于接收器的类型。对于型号为dump1090的传感器,这些时间戳通常不同步,并且仅具有12MHz的分辨率,不同步的时间戳会导致这些时间戳存在漂移(有时会很严重)。对于Radarcape和GRX1090传感器,这些时间戳与GPS同步(GPS同步意味着它们会不断重新同步以补偿时钟漂移),分辨率约为40-60MHz。
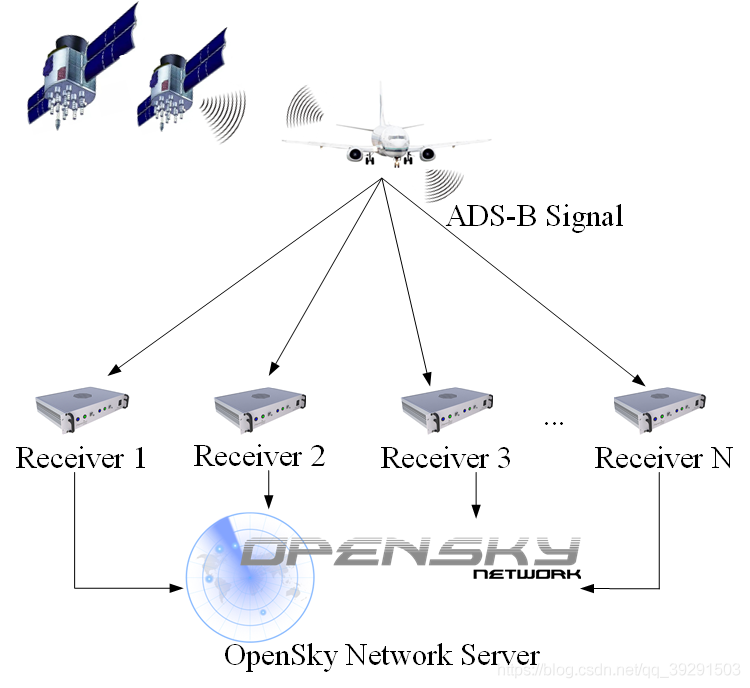
图2 OpenSky服务器系统
需要注意的是,主数据集涉及两个时间戳,分别是OpenSky服务器时间戳timeAtServer和Measurements中的传感器接收信号时间戳。如图2所示系统,飞行器间隔发出ADS-B报文,在接收范围内的接收机能够接收到此报文,最后通过网络上传至OpenSky服务器,由服务器汇总每个时间点各个接收机收到的对应航班的报文。OpenSky服务器和每个接收机(传感器)都有各自的时间戳,且有各自的时间基准,又或存在网络延迟导致时钟漂移,因此它们的时间戳不是同一个时间戳,无法合并。
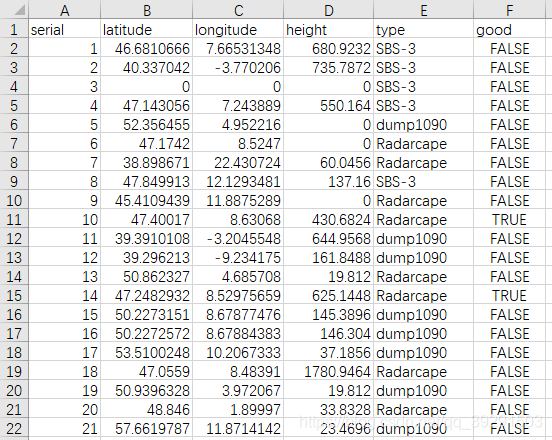
图3 传感器数据集
Serial(序列号):与图1主数据集中Measurements(传感器测量数据)栏数据相对应,是传感器的全局唯一序列号。
Latitude/longitude/height(地面传感器的纬度/经度/高度):纬度和经度以十进制度(WGS84)为单位,高度以米为单位。此信息的准确性/不确定性未知,对于dump1090类型的传感器,这些位置由用户自己输入,大多数用户使用诸如Google Maps或智能手机之类的服务来确定天线的位置,此过程会出现误差,误差通常在数米范围内,但也有一些用户出于隐私原因,故意报告错误的位置,以伪装其确切位置,在这种情况下,位置甚至可能会出现几公里的误差。对于Radarcape或GRX1090类型的传感器,其位置更准确,因为它们由集成的GPS接收器自动报告,并且GPS天线通常位于靠近ADS-B天线的位置。
Type(传感器类型):OpenSky当前支持基于开源S模式软件解码器dump1090和商用设备Radarcape,SBS-3和GRX1090的传感器。设备类型决定了测量噪声分布和时间戳精度(测量噪声分布和时间戳精度还取决于许多其他因素,例如:温度,内部/室外部署等)。
Good(接收数据的准确性):True表示该传感器数据绝对可靠,False表示该传感器数据的可靠性存疑(具体误差未知)。
数据集分析
官方已经对数据进行了一定的分析,本文根据官方分析,使用matlab对官方分析进行复现,并做相关理解。
1、csv转换为matlab可用数组(此步很重要,影响后面训练集制作)
官方下载的数据集是csv格式,导入到matlab,为方便后续计算整合需要将已有csv转换成double类型矩阵。csv直接导入matlab会得到table类型矩阵,如图1,该主数据集中,A-H列数据可以直接转换成double类型数据,I列数据为string类型,需要对其分割并转换成double类型,如:
[[470,982753933,38],[499,6026974083.33333,30]] 要转成6列double类型数据
| 470 |
982753933 |
38 |
499 |
v |
30 |
为方便管理数据,还需要将图1和图3中的数据整理到同一个矩阵中,重点需要整合图3中的每个传感器的坐标。如:[[470,982753933,38],[499,6026974083.33333,30]],将传感器对应坐标整合入后得12列double类型数据

470 982753933 38 470号传感器纬度 470号传感器经度 470号传感器高度 499 6026974083.33333 30 499号纬度 499号经度 499号高度
为方便在传感器数据集中查找传感器对应坐标,先将图3传感器数据集中的A-D列转换成double类型矩阵(E、F列暂时用不着,先不管),存于变量sensors_double中,供后续使用。
整合图1和图3数据集的matlab代码如下:
load('./point_color.mat');%随机生成的颜色矩阵,用于画图取色
load('./flightA_timestamps.mat');
temp=flightA_timestamps;
[n,m]=size(temp);
figure;
xlabel("Server's Timestamp (s)");
ylabel("Receiver's Timestamp (ns)");
set(gca,'FontName','Times New Roman','FontSize',20);
grid on;
hold on;
for i = 1:n
if(~mod(i,1000))
fprintf('已完成 %d 行!\n',i);
end
for t = 3:2:m
if temp(i,t)==0
break;%碰到0表示改行后面已无有效传感器数据,可以直接跳入下一行
end
%描点,不同传感器有不同的颜色
plot(temp(i,1),temp(i,t),'.','Color',[point_color(temp(i,t-1),1),point_color
(temp(i,t-1),2),point_color(temp(i,t-1),3)],'LineWidth',1.5);
end
end
|
整合后的数据被存入变量allinfo中,由于有多个主数据集,考虑到内存限制,可以对每个主数据集分开处理。(即allinfo是图1和图3中数据的整合)
2、分析服务器与传感器两大时间戳关系
研究时间戳关系只需取出其中一个航班进行观察即可,将矩阵allinfo按第3列升序排序(图1中的C列,Aircraft航班号),截取其中一个航班的所有数据,存入矩阵flightA_allinfo,供后续使用。(补充说明:原始数据默认按服务器时间戳升序排列,此时的航班号是乱的,若按航班号升序排列,会把相同的航班放一起,同时每个航班内按服务器时间戳升序排列,方便后续处理)
此时只分析传感器时间戳和服务器时间戳的关系,因此继续对矩阵flightA_allinfo处理,删除无用数据列,仅保留两大时间戳,存入变量flightA_timestamps,截取矩阵flightA_timestamps部分数据,如图4所示。
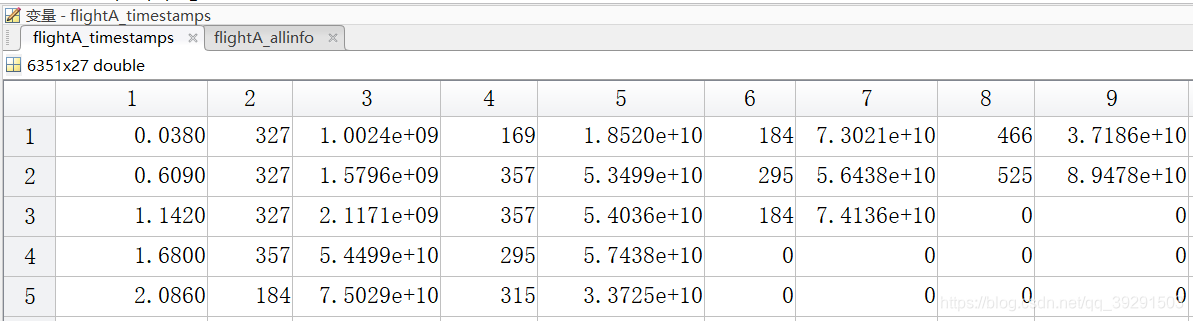
图4 矩阵flightA_timestamps部分数据情况
每列数据表示意义:

如图4所示,第一个采集点共有4个传感器接收到数据,第三个采集点仅有2个传感器接收到数据,后面的数据列用0补充。因此矩阵flightA_timestamps的列数取决于所有采集点中能接收到数据的传感器的最大个数。
matlab实现服务器与传感器时间戳关系作图:
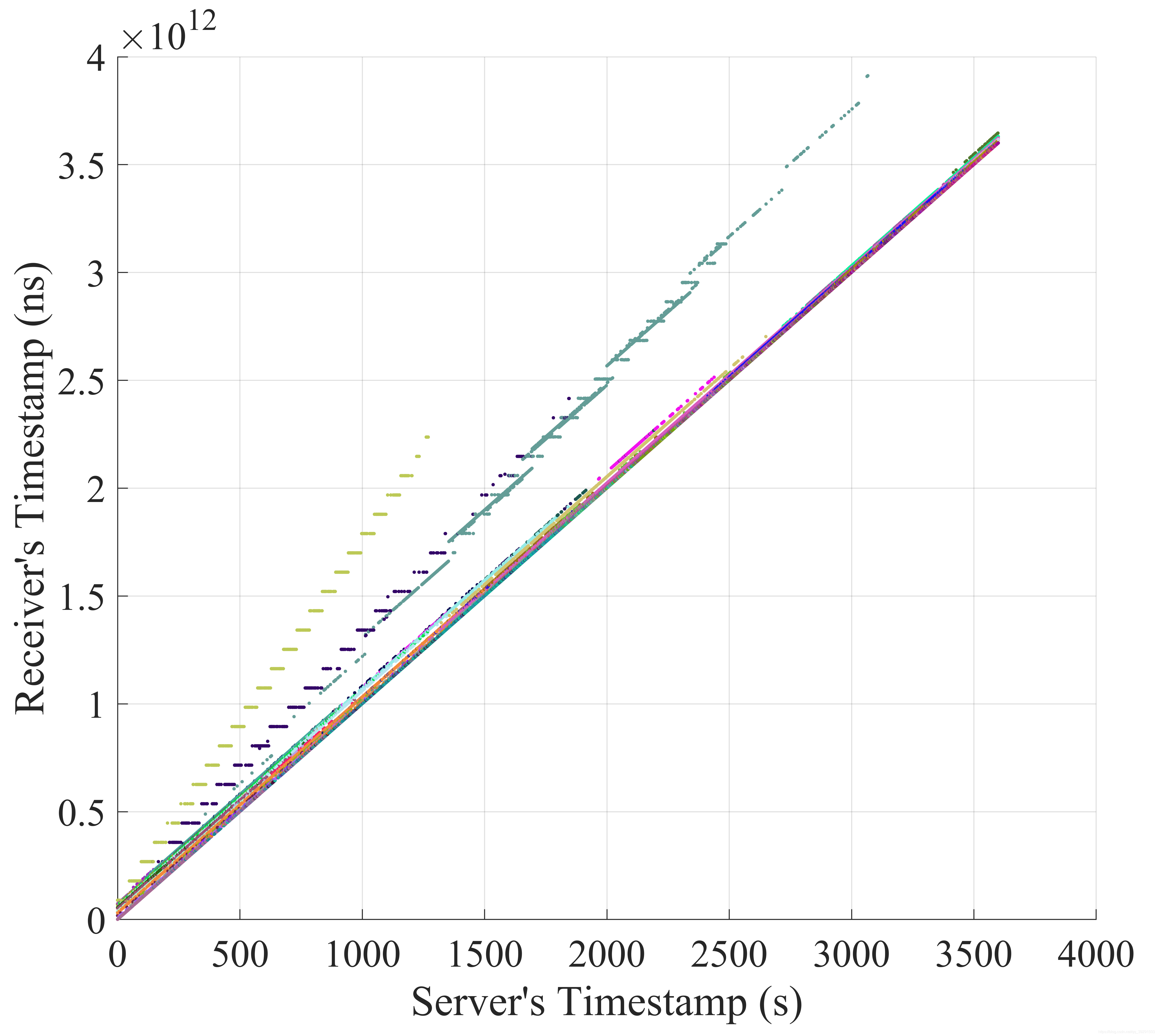
图5 传感器-服务器时间戳关系曲线
如图5所示,纵轴为各个传感器的接收信号时间戳(单位:纳秒),横轴为timeAtServer (OpenSky服务器接收时间戳,单位:秒),该曲线体现了以航班A为例的各个传感器接收信号时间戳与OpenSky服务器接收信号时间戳的关系,图中不同颜色表示不同的传感器,从图5中能够发现有三个传感器偏移了其他传感器的曲线,这三个传感器存在时间戳的损坏或者不同步等问题。
通过矩阵flightA_timestamps继续研究时间戳差值,即替换描点代码为:
plot(temp(i,1),temp(i,t)/10e8-temp(i,1),'.','Color',[point_color(temp(i,t-1),1),
point_color(temp(i,t-1),2),point_color(temp(i,t-1),3)],'LineWidth',1.5);
|
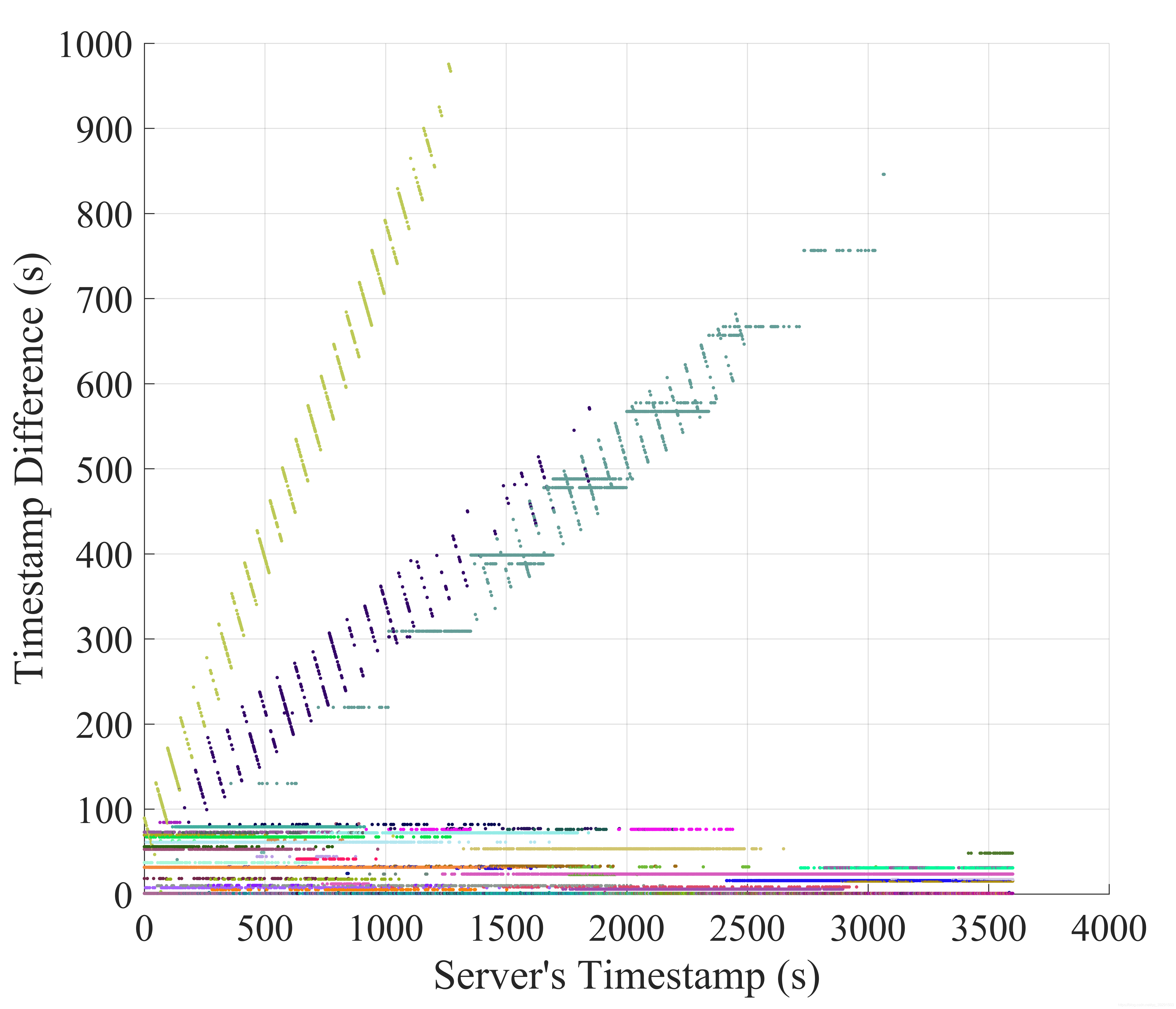
图6 传感器-服务器时间戳差值关系曲线
将图5中每个传感器的接收信号时间戳与服务器接收时间戳相减得到图6,该图能够更加直观地看出有三个传感器曲线偏移了其他传感器曲线。
在图6中还能看出,绝大多数的传感器时间戳与服务器时间戳的时间基准不同,即服务器时间戳为0时,传感器时间戳不一定为0,多数传感器时间戳与服务器时间戳在数值上相差0~100秒。再次印证了传感器时间戳相互之间独立,且与服务器时间戳也独立,它们有着各自的时间基准,无法直接合并使用。
3、分析传感器接收信号强度与接收距离关系
依旧利用矩阵flightA_allinfo,观察各个传感器接收到信号强度与接收距离的关系。matlab代码如下:(补充说明:该代码仅做数据可视化,用于定位“无效”传感器,但未做剔除,即没有把“无效”的传感器删除。若要删除,先记录下“无效”传感器id,后面做数据集时对这些“无效”传感器做跳过处理)
temp(:,i:i+2)=lla2ecef(temp(:,i:i+2)); temp(:,i)=((temp(:,i)-temp(:,1)).^2+(temp(:,i+1)-temp(:,2)).^2+(temp(:,i+2)-temp(:,3)).^2).^0.5;
load('./point_color.mat'); ylabel('Signal Strength (dB)'); set(gca,'FontName','Times New Roman','FontSize',20); plot(temp(i,t+2),temp(i,t+1),'.','Color',[point_color(temp(i,t),1),point_color(temp(i,t),2),point_color(temp(i,t),3)]);
|
如图7所示,该图体现了以航班A为例的各个传感器接收信号强度与接收距离之间的关系(不同的传感器用不同的颜色表示),纵轴表示传感器接收信号的强度(单位:dB),横轴表示传感器与飞行器之间的三维空间距离(单位:米)。从图7的整体分布能够看出,传感器与飞行器之间的三维空间距离越小,传感器接收强度越大,同时能够发现有些点不随距离变化而变化,这些传感器也许存在损坏。
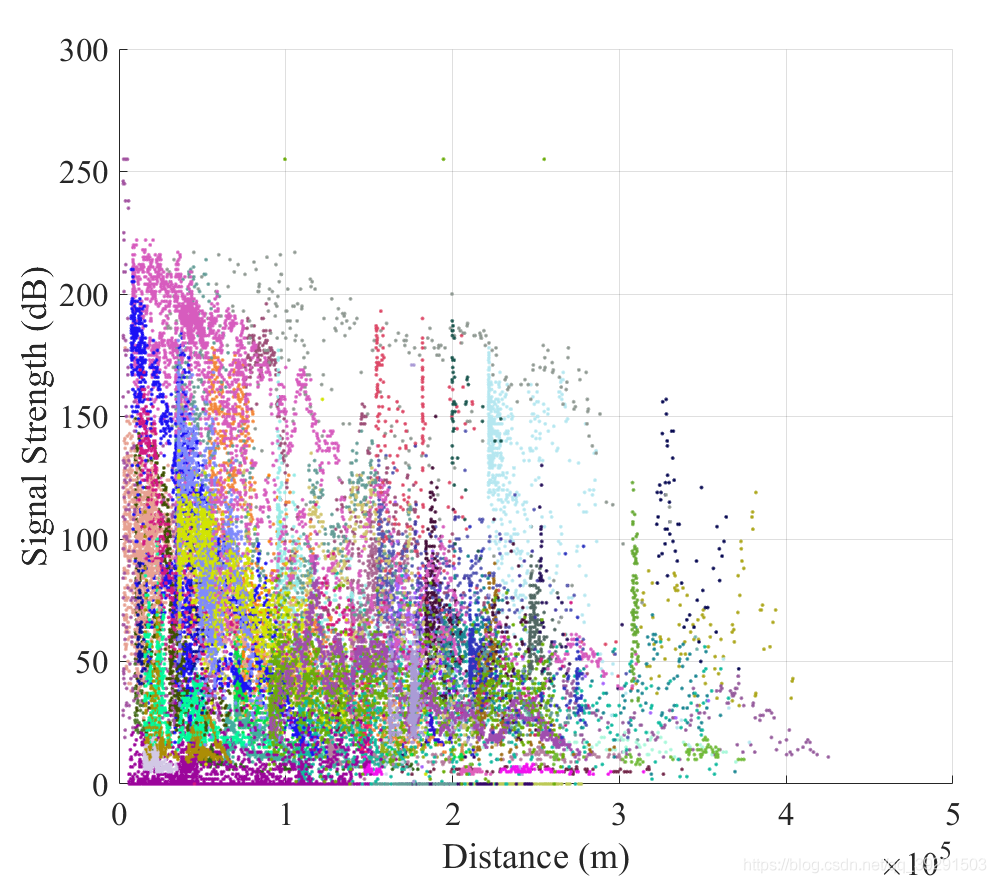
图7 传感器接收信号强度与接收距离关系
4、分析采集到的数据集有效性
数据集的有效性主要包括:传感器数据有效性和飞行轨迹有效性。
(1)传感器数据有效性
传感器的筛选主要用于提高训练集或测试集输入数据的可靠性。本文优先使用标签Good(接收数据的准确性)为Ture的数据,由于标签为True的数据较少,为了尽可能利用更多的数据,对于剩余标签为False的数据,结合传感器的类型再进一步筛选。
根据数据集标签Type(传感器类型)的描述,可知各类传感器精准度排序为:GRX1090 = Radarcape > SBS-3 > dump1090。
Radarcape、GRX1090或SBS-3类型的传感器相比于dump1090类型的传感器精度更高,且自身坐标更准确,所以优先采用Radarcape、GRX1090或SBS-3的数据,最后再考虑dump1090的数据。
(2)飞行轨迹有效性
飞行器轨迹筛选主要用于提高训练集输出数据的可靠性。由于飞行器报告的当前位置坐标可能存在一定误差,本文对训练集的所有航班轨迹进行可视化人工筛选。如图8,例举了损坏的轨迹、信号中断的轨迹和良好的轨迹。损坏的轨迹和信号中断的轨迹显然需要从数据集中剔除,否则会影响后续训练性能。
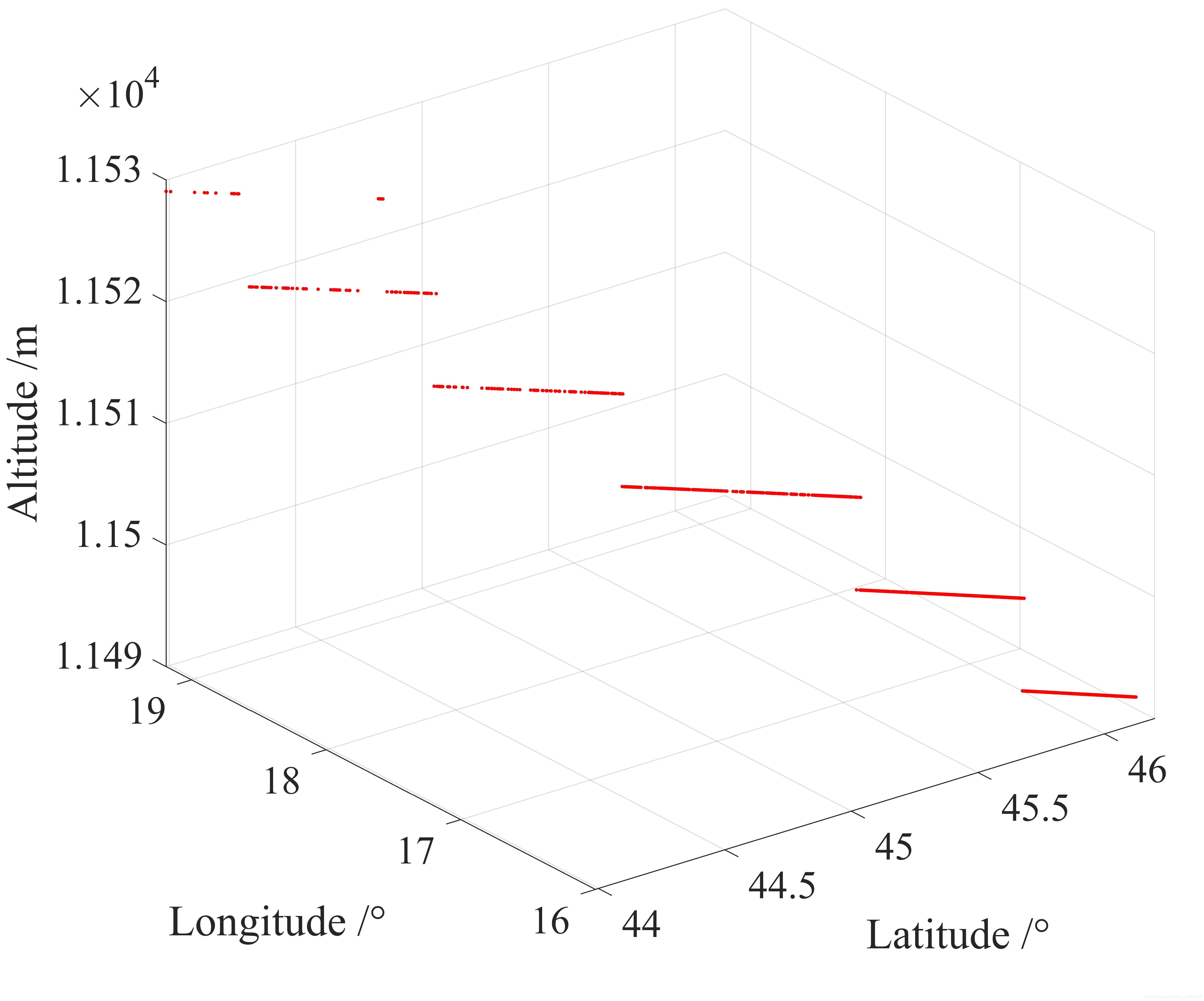
(a)损坏的轨迹
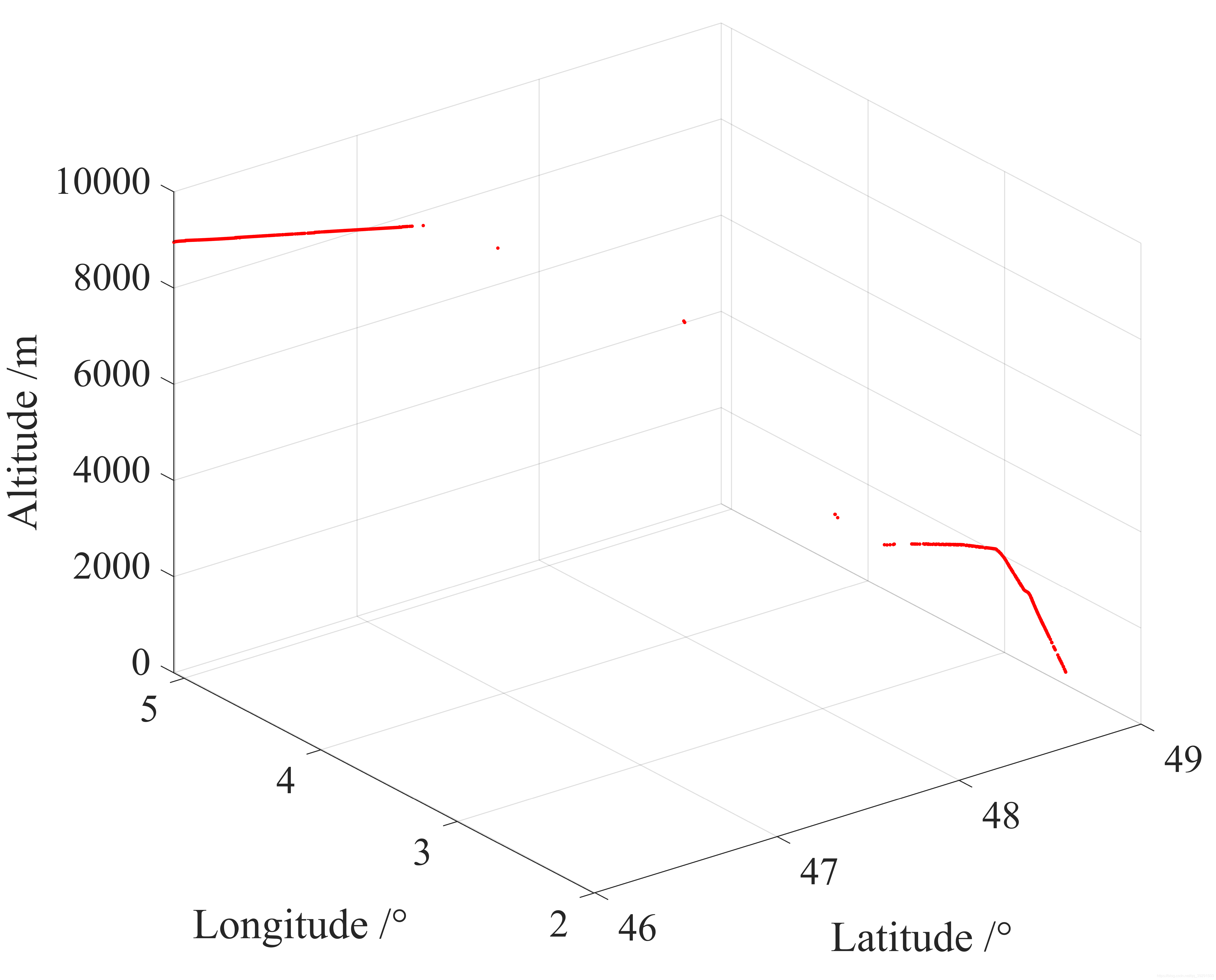
(b)信号中断的轨迹
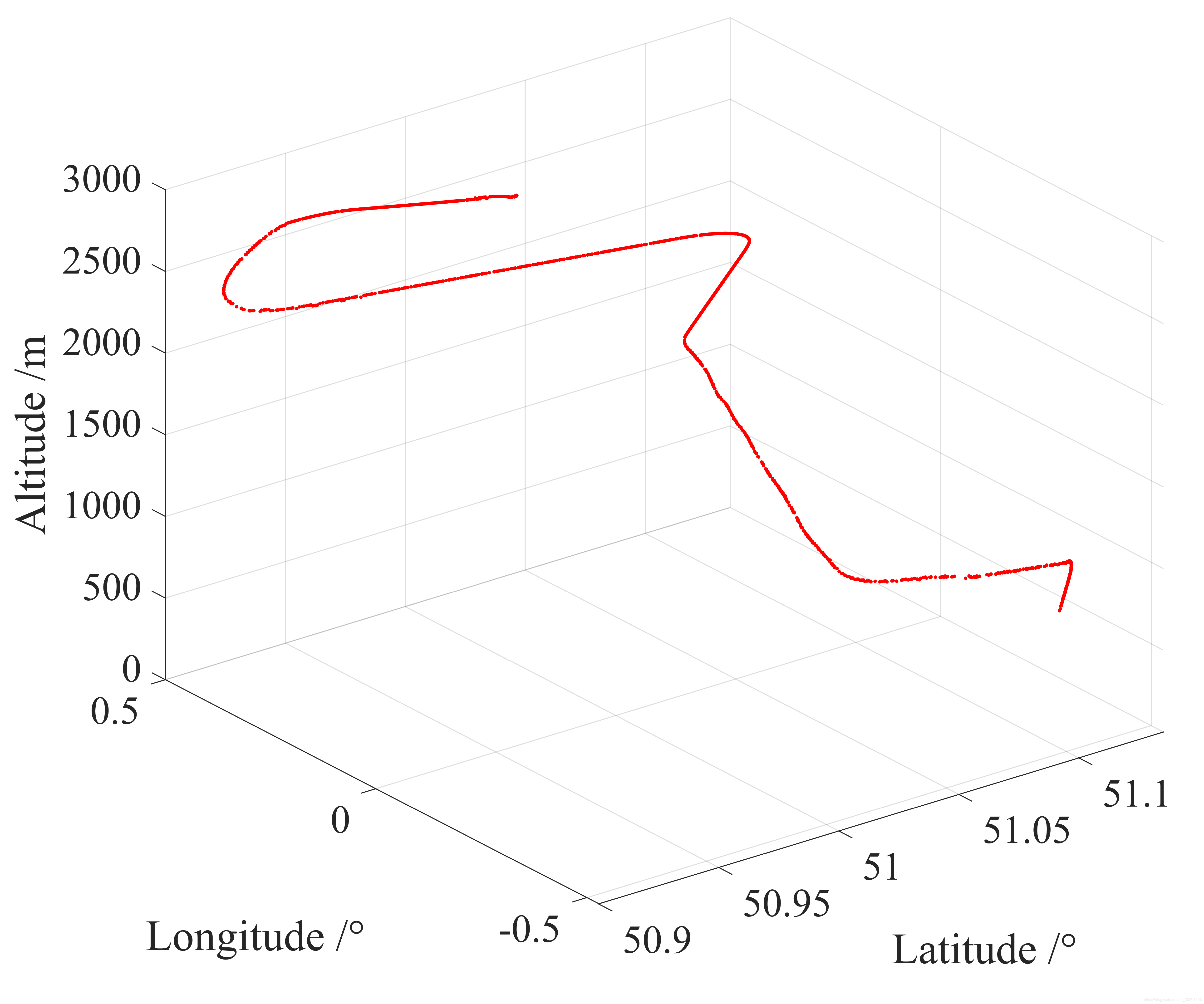
(c)良好的轨迹
图8 所采集的常见飞行轨迹例举
轨迹筛选过程完全由人工主观完成,没有统一的标准,适当保留一些无效的轨迹也能提高后续训练模型的鲁棒性。此过程很费时间,官方提供的数据集中存在大量无量轨迹,需要耐心筛选,源自于真实世界的数据确实会存在种种干扰,也是我们需要面对的一大挑战。
整个筛选过程在矩阵allinfo上进行,matlab代码如下(键盘输入d删除当前航班,a跳过,s删除上一个航班,b退出筛选):
fprintf('已完成 %d 行!\n',i); train_id=[train_id start]; train_count=[train_count count]; train_index=[train_index reg]; train_id=[train_id start]; train_count=[train_count count]; train_index=[train_index reg]; a=input('是否要清空train_delete?(y/n)','s'); set(gcf,'CurrentCharacter','c'); fprintf('%d、当前航班数据采集点个数 %d ,',i,train_count(i)); scatter3(temp(train_id(i):train_id(i)+train_count(i)-1,4),temp(train_id(i):train_id(i) +train_count(i)-1,5),temp(train_id(i):train_id(i)+train_count(i)-1,7),'r','.'); set(gca,'FontName','Times New Roman','FontSize',20); input_=get(gcf,'CurrentCharacter'); train_delete=[train_delete temp(train_id(i),3)]; fprintf('按键 %c \n',input_); set(gcf,'CurrentCharacter','c'); train_delete=[train_delete temp(train_id(i-1),3)]; fprintf('按键 %c \n',input_); set(gcf,'CurrentCharacter','c'); fprintf('按键 %c \n',input_); set(gcf,'CurrentCharacter','c'); fprintf('按键 %c \n',input_); set(gcf,'CurrentCharacter','c');
|
补充说明:代码上半部分是标记需要剔除的航班号,存于变量train_delete中,真正删除的操作需要打开最下面的注释,最终得到的temp便是剔除“无效”航班后的数据,重命名作为新的allinfo,供后面制作数据集使用。
筛选过程如下:
本章总结
通过对数据集的分析,发现这些由传感器真实采集的数据受多重因素干扰,会存在时间戳不同步、时钟漂移、传感器损坏、飞行轨迹损坏或信号中断等问题,为后续制作训练集造成很大的困难。
原文链接:https://blog.csdn.net/qq_39291503/article/details/117673374
|







 订阅
订阅