| ±ајНЖјц: |
±ѕОДЦчТЄЅІЅвБЛ·ЙїШИнјюТ»Р©ИнјюЎўЛг·ЁІї·ЦЅшРРМЦВЫ
,ёь¶аДЪИЭЗлїґИ«ОДЎЈ
АґЧФУЪОўРЕAuscor,УЙ»рБъ№ыИнјюAnna±ајЎўНЖјцЎЈ |
|
1 ·ЙїШИнјюµД»щ±ѕДЈїй
ОЮИЛ»ъДЬ№»·ЙРРЦчТЄКЗТАїїґ«ёРЖчПµНі»сИЎО»ЧЛРЕПўІў·ґАЎµЅОўґ¦АнЖчЅшРРїШЦЖПµНіµДФЛЛгЎЈЛщТФ·ЙїШИнјюЙијЖЦчТЄёєФрґоЅЁєПАнИнјюБчіМЈ¬К№ёч№¦ДЬДЈїйРµчУРР§µД№¤ЧчЎЈ
Т»ёц·ЙїШПµНіµД»щ±ѕ№¤ЧчЦчТЄУРЈє
1ЎўCPUЅУКХТЈїШЖчµДІЩЧчЦёБоєНґ«ёРЖчРЕєЕЈ»
2Ўўґ«ёРЖчµДКэѕЭґ¦АнєНКэѕЭИЪєПЛг·ЁФЛЛгЈ¬µГµЅО»ЦГЎўЧЛМ¬РЕПўЈ»
3ЎўёщѕЭїШЦЖЦёБоНкіЙПаУ¦µДїШЦЖЖчЈЁЧЛМ¬ЎўО»ЦГЈ©јЖЛгЈ¬µГіцїШЦЖБїІўКдіцµЅµз»ъЗэ¶ЇЈ»
2 ИнјюЙијЖ·Ѕ·ЁµДМЦВЫ
ёХЅУґҐ·ЙїШµДК±єтЈ¬КµСйКТФЪЙијЖЦ®іхЈ¬ОЄБЛ·Ѕ±гїмЅЭЈ¬ИнјюПµНіµД±аРґІЙУГЗ°єуМЁІЩЧчµД·ЅКЅЎЈХвёц·ЅКЅµДУ¦УГіМРтКЗФЪ·ЕФЪmianЦчєЇКэАпГжОЮПЮС»·Ј¬µчУГПаУ¦µДґ¦АнЧУєЇКэЎЈХвіЖОЄєуМЁіМРтЎЈ¶шЗ°МЁіМРтЦёµДѕНКЗЦР¶ПіМРтґ¦АнТмІЅґҐ·ўКВјюµДіМРтЎЈ№КЗ°МЁіМРтіЖОЄЦР¶Пј¶іМРтЈ¬¶шєуМЁіМРтіЖОЄИООсј¶іМРтЎЈТтґЛУРР©№М¶ЁЦЬЖЪЦґРРµДИООс¶јТЄїїЦР¶П·юОсіМРтАґНкіЙЈ¬ТФ±ЈЦ¤К±јдµДѕ«И·РФЎЈµ«КЗФЪЦР¶Пґ¦АніМРтЦРЦ»±кјЗКВјюµД·ўЙъЈ¬І»ЧцИОєОґ¦АнЈ¬ЧЄ¶шУЙєуМЁПµНіµч¶Иґ¦АнЈ¬ХвКЗОЄБЛ±ЬГвФЪЦР¶ПіМРтЦґРРК±јд№эі¤У°ПмєуРшєНЖдЛыЦР¶ПКВјюЎЈ
ХвЦЦЙијЖ·Ѕ·ЁµДУЕµгЈє
1ЎўКµПЦјтµҐЈ¬МШ±рКЗ¶ФУЪ±КХЯХвСщµД±аіМФьЈ¬ХХЧЕstm32µДївєЇКэРґґъВлЈ¬ТІїЙјтµҐКµПЦЈ»
2ЎўАаЛЖµҐЖ¬»ъµД±аіМЈ¬Г»УРOSЈ¬ТтґЛ¶ФCPUµДРФДЬТЄЗуІ»ЛгёЯЈ¬І»М«№ШЧўROM/RAMЈ»
3ЎўИз№ыЙијЖµГµ±Ј¬ПаЅПУЪґшOSµД·ЙїШЈ¬ПµНіФЛРРёьјУОИ¶ЁЈ¬МэЛµєЬ¶а№¤Тµј¶µД·ЙїШКЗІ»ґшOSµДЈ»
И±µгЈє
УЙУЪКЗУГФЪ·ЙРРїШЦЖПµНіЦРЈ¬¶ФХыёцПµНіµДКµК±РФУРЧЕєЬёЯµДТЄЗуЈ¬Из№ыВЯјєНК±РтіцПЦЖ«ІоЈ¬Ѕ«іцПЦОЮ·Ё№АјЖµДСПЦШєу№ыЎЈ¶шФЪіхКјїЄ·ў№эіМЦРЈ¬·ўПЦІЙУГґЛЗ°єуМЁПµНіґшАґБЅґуОКМвЈє
1ЎўЙијЖІ»µ±µД»°Ј¬±ИИзДіёцЦЬЖЪµДєЇКэЦґРРі¬К±Ј¬єуГжЛщУРµДіМРт¶ј»бКЬµЅУ°ПмЎЈИз№ы·ЙїШіМРтЦґРРК±јд±дµГІ»№»ЧјИ·Ј¬І»АыУЪ¶Ф·ЙРРЖчµДїШЦЖЈ¬СПЦШК±·ўЙъ·Й»ъК§їШµДПЦПуЎЈ
2ЎўТЖЦІРФєНА©Х№РФІоЈ¬ёшХыёціМРтєуРшёД¶ЇєНО¬»¤ґшАґІ»±гЈ¬УЙУЪёчЦЦИООс¶јКЗПа№ШµДЧУєЇКэЈ¬НщНщТ»ёцИООсРиТЄµчУГ¶аёцЧУєЇКэЎЈФЪіМРтёД¶Ї»тХЯО¬»¤µДК±єт±дµГ·ЗіЈ·±ЛцёґФУЎЈѕіЈУЙУЪєцВФДіТ»ПёЅЪ¶шµјЦВ№¦ДЬОЮ·ЁКµПЦЈ¬ЧоєуµјЦВіМРтµДїЙ¶БРФЅµµНЈ¬І»АыУЪЛыИЛЧціМРтРЮёДЎЈ
ЧоЅьјёДкТІЅУґҐБЛТ»Р©їЄФґ·ЙїШЈ¬їґБЛУР№ШґшOSµД·ЙїШЙијЖЎЈХвЦЦЙијЖ·Ѕ·ЁКЗФЪДіТ»ІЩЧчПµНіЙПЅшРР¶юґОїЄ·ўЈ¬OSНЁ№эТ»ёцДЪєЛµДµч¶ИАґ№ЬАнCPUЈ¬К№µГЛщУРµДДЈїйТІѕНКЗИООс¶јДЬХэіЈФЛРРЈ¬ґпµЅПа¶ФТвТеµДЎ°ІўРРЎ±ЎЈН¬К±ІЙУГ»щУЪУЕПИј¶µДїЙ°ю¶бРФµч¶ИЛг·ЁАґ±ЈЦ¤КµК±РФЎЈRTOS
Ѕ«У¦УГІгИнјю·ЦіЙ¶аёцИООсЈ¬јт»ЇБЛУ¦УГИнјюµДЙијЖЈ¬Н¬К±К№µГ·ЙРРїШЦЖµДКµК±РФµГµЅ±ЈЦ¤ЎЈ
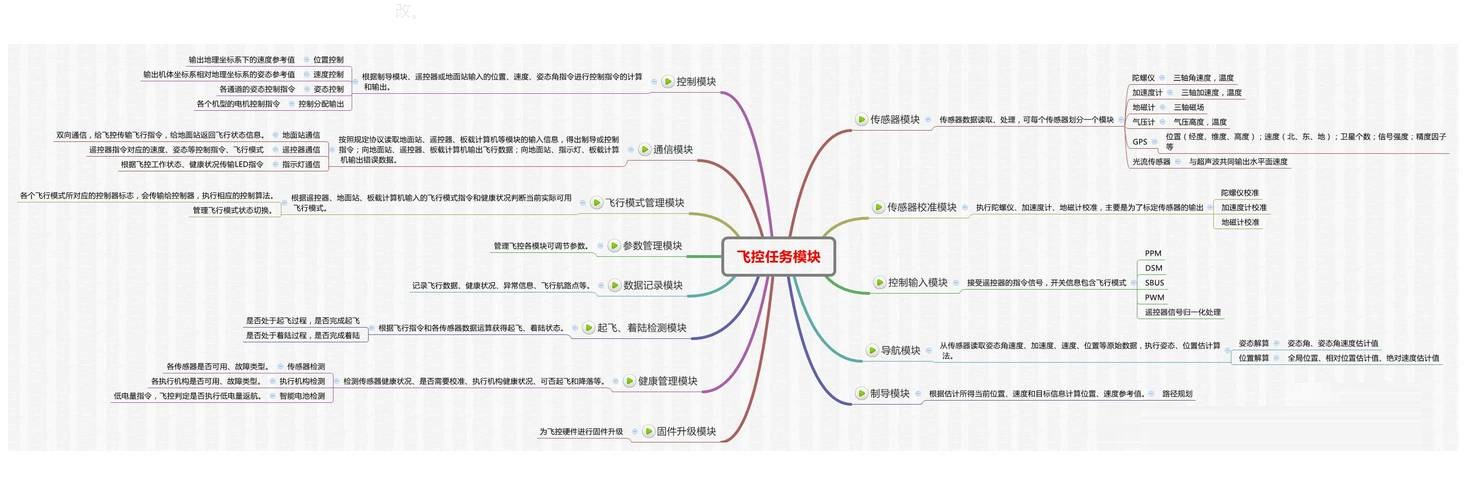
3 НкХыµД·ЙїШПµНіЧйіЙДЈїй
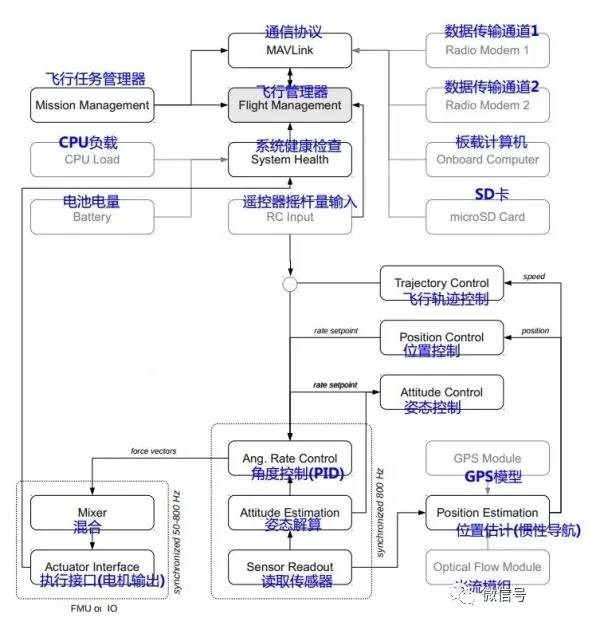
µ±ЙијЖТ»ёцЙМТµ·ЙїШµДИнјюК±Ј¬ѕНІ»ЅцЅцКЗИГ·Й»ъ·ЙЖрАґДЗГґјтµҐБЛЈ¬ТІѕНКЗЛµИнјюДЈїйіэБЛ»щ±ѕТЄЛШНвЈ¬»№РиУРЖдЛыА©Х№Ј¬ИзПВНјЛщКѕЎЈ
4 ·ЙїШКэѕЭБч·ЦОц
µ±КмП¤БЛ·ЙїШПµНіЦРіЈУГµДИнјюДЈїйЈ¬ДЗХвР©ДЈїй»ҐПаЦ®јдУЦКЗФхСщµД№ШПµЈїУЦКЗИзєО»ҐПаНЁРЕЈ¬ёчЧФРиТЄКІГґКэѕЭАґНкіЙ·ЙРРИООсЈї
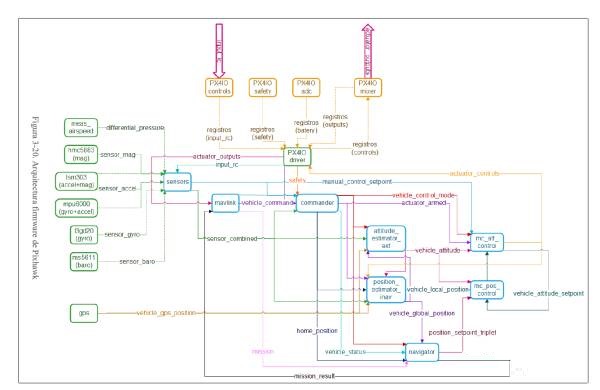
ТФpixhawk·ЙїШµДФЙъ№МјюОЄАэЈ¬ИзПВНјЛщКѕЎЈХвНјКЗєЬФзЖЪµДґъВлјЗВјПВАґµДЈ¬УлЧоРВµДґъВлПа±ИЈ¬УРР©ОуІоЈ¬І»№эІоІ»¶аЈ¬ДЬЅвКНОКМвЈ¬ЛщТФ±КХЯАБµГёьРВЈ¬ЦШРВ»НјБЛЎЈ
5 КѕАэ·ЦОц
ХЖОХБЛТФЙПЛщГиКцµДјёёцЦЄК¶µгЈ¬ХвСщ»щ±ѕЙПФЪіхґОФД¶БТ»·Э·ЙїШґъВлК±Ј¬ДЬУРЖрВлµДИПЦЄБЛЎЈПВГжјтµҐЅйЙЬБЅїоїЄФґµД·ЙїШґъВлЈ¬¶јКЗНшЙПХТµДґъВлЈ¬ЦчТЄїґПВИнјюјЬ№№ЎЈ
5.1 єгНШїЄФґ·ЙїШ
»щУЪMDKµДїЄ·ў»·ѕіЈ¬К№УГCУпСФЈ¬»щУЪSTM32µД№Щ·ЅївЎЈ
ґъВлЅб№№Јє
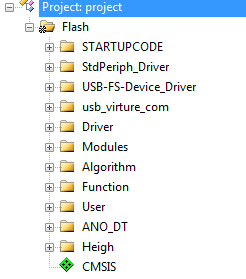
STARTUPCODEЈєstm32µДЖф¶ЇОДјюЈ»
StdPeriph_DriverЈє»щУЪ3.5°ж±ѕµДївєЇКэµДЗэ¶ЇОДјюЈ»
USB-FS-Device_DriverЈєUSBЙи±ёЗэ¶ЇОДјюЈ»
usb_virture_comЈєUSBµД°еј¶Ц§іЦЗэ¶ЇЈ»
DriverЈє°еј¶Зэ¶ЇІгЈ¬°ьє¬Т»Р©ЧЬПЯєННвЙиµДЗэ¶ЇіМРтЈ»
ModulesЈєґ«ёРЖчДЈїйµДЗэ¶ЇіМРтЈ»
AlgorithmЈєЛг·ЁіМРтЈ¬°ьє¬ВЛІЁЎўКэС§ївµИЈ»
FunctionЈє·ЙРРУ¦УГІгЈ¬№ШјьДЈїйЈ¬±ИИзЧЛМ¬№АјЖЎўЧЛМ¬їШЦЖµИЈ»
UserЈєЦчіМРтєНЦР¶ПУ¦УГіМРтЈ»
ANO_DTЈєЦ§іЦДдГыµШГжХѕРТйЈ»
HeighЈєёЯ¶ИїШЦЖіМРтЈ»
ХыёцґъВлµДДЈїй»Ї·ЗіЈПёЦВЈ¬±ИЅПЗеОъЎЈ
ґъВлЙијЖѕНКЗЗ°ГжЛщЅІµДВг»ъґъВлµДТ»°гКµПЦ·Ѕ·ЁЎЈ
ПИїґmainОДјюЈє
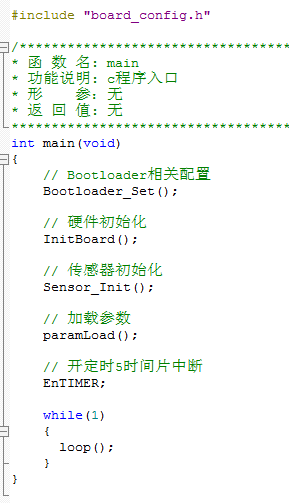
·ЗіЈјтµҐЈ¬ЙПµзЅшРРёчЦЦіхКј»ЇЈ¬И»єуґуС»·Ј¬С»·ЦґРРИООсµч¶ИЎЈ
ПВГжїґПВloopµДєЇКэДЪИЭЎЈ
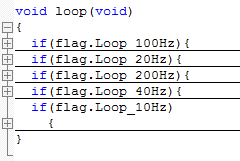
Ѕ«Хыёц·ЙїШґъВл·ЦіЙБЛјёёцЦЬЖЪ·Ц±рОЄ5msЈ¬10msЈ¬25msЎў50msєН100msµДИООсЎЈ¶шГїёцИООсµДК±јд±кЦѕflagКЗУЙТ»ёцК±јдЖ¬єЇКэЅшРР№ЬАнµДЎЈЙиБЛТ»ёцtickЅЪЕДЈ¬2.5msТ»ґОЈ¬ЛщТФ±ИИзјЖКэґпµЅ2ґОЈ¬Фт5msµД¶ЁК±ИООсјґїЙЦґРРЎЈ
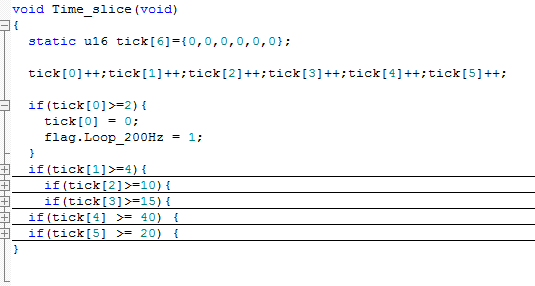
¶шХвёцК±јдЖ¬єЇКэКЗТ»ёц¶ЁК±ЦР¶ПЈ¬Гїёф2.5msЦґРРТ»ґОЎЈ
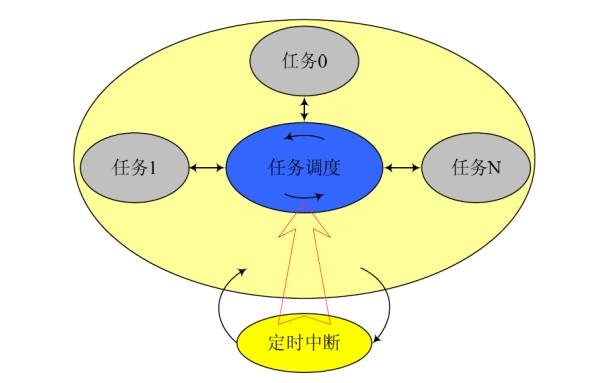
ХвЦЦіМРтЙијЖ·Ѕ·ЁИзПВНјЛщКѕЎЈ¶ЁК±ЦР¶ПµДУ°ПмЦ»ФЪИООсµч¶ИДЈїйАпЖрЧчУГЈ¬ТАґОИГІ»Н¬µДИООс°ґІ»Н¬µДЦЬЖЪЅшРРЦґРРЎЈТЄЧўТвµДКЗЛщЙијЖµДГїёцИООсФЛРРК±јдІ»ДЬі¬№эЙи¶ЁµДЦЬЖЪЎЈ
±КХЯТІїґБЛ№ъДЪУРГыµДДдГы·ЙїШЈ¬ТІКЗН¬СщµДµч¶ИЙијЖ·Ѕ·ЁЈ¬БнїЄФґardupilot·ЙїШЈ¬ТтАъК·ФТтЈ¬КЗјМіРAPM·ЙїШ¶шАґЈ¬ТІКЗІЙУГХвЦЦАаOSµДО±µч¶ИЖч·ЅКЅЈ¬ґъВлИ«ІїЛіРтЦґРРЈ¬ёщѕЭ¶ЁК±µДјЖКэ±кЦѕИҐ·Ц±р°ІЕЕ·ЙїШИООсЎЈ
5.2 PX4·ЙїШ - PixhawkФЙъ№Мјю
їЄФґPX4·ЙїШПа¶ФёґФУ¶аБЛЈ¬єЬ¶аИнјюµДПёЅЪ±КХЯТІІ»ЙхБЛЅвЈ¬ЛщТФѕНјтµҐГиКцПВЎЈ
PX4·ЙїШґУИнјюјЬ№№ЙПїЙТФ·ЦОЄЛДІгЎЈФЪГїТ»ІгАпЈ¬ёчёцЗэ¶ЇіМРт»тЙПІгµДїШЦЖ/№АјЖЛг·Ё¶јКЗТ»ёц¶АБўДЈїйЈ¬ДЬ№»ФЪФЛРРЖڼ以ПаНЁРЕЎЈХвЦЦДЈїй»ЇµДЙијЖІ»ЅцУРЦъУЪЦ§іЦёь¶а»ъРН(ТтОЄІ»ґжФЪМШ¶Ё»ъРНµДЦчС»·)Ј¬Н¬К±К№µГґъВлѕЯУРёЯ¶ИµДїЙТЖЦІРФЎЈ
1Ўў У¦УГІгЈєёГІгКЗХыёц·ЙїШПµНіФЛРРµДєЛРДЎЈ·ЙїШИХіЈ·ЙРРЛщУГµЅµДДЈїй»щ±ѕЙП¶јФЪХвІгЈ¬°ьАЁЧЛМ¬їШЦЖЈ¬ЧґМ¬№АјЖЈ¬µјєЅДЈїйµИµИАґНкіЙ¶аРэТнєН№М¶ЁТнНкИ«ЧФЦчµДєЅµг·ЙРРЎЈУ¦УГІгїЙТФК№УГЖдЛыµДїШЦЖИнјюЈ¬ИзAPM:PlaneЎўAPM:CopterЈ¬µ«±ШРлФЛРРУЪЦРјдІгЦ®ЙПЎЈ
2Ўў ЦРјдІгЈє НЁС¶µДЦРјдІгФЛРРУЪІЩЧчПµНіЦ®ЙПЈ¬МṩЙи±ёЗэ¶ЇєНТ»ёцОў¶ФПуЗлЗуґъАнЈЁmicro object
request broker Ј¬uORB)УГУЪ·ЙїШЙПФЛРРµДµҐёцИООсЦ®јдµДТмІЅНЁРЕЎЈ
3Ўў NuttXІЩЧчПµНіІгЈєМṩёшУГ»§ІЩЧч»·ѕіЈ¬ЅшРРµЧІгµДИООсµч¶ИЎЈ
4Ўў µЧІгЗэ¶ЇІгЈє МṩϵͳФЛРРЛщРиТЄµДУІјюЗэ¶ЇЈ¬ИзТ»Р©ґ«ёРЖчЎўЦґРРЖчµИЎЈ

°еФШіМРтДЈїйЈє
uorbНЁРЕ№¦ДЬГиКц
ФЪ·ЙїШПµНіЦРЈ¬У¦УГІгЛщУРµД№¦ДЬ±»¶АБўТФЅшіМДЈїйОЄµҐО»ЅшРРКµПЦІў№¤ЧчЈ¬¶шЅшіМјдµДКэѕЭЅ»»ҐѕНУЙОЄЦШТЄЎЈОЄБЛИ·±ЈНЁС¶·ыєПКµК±ЎўУРРтµДМШµгЈ¬РиТЄТ»ЦЦ°ІИ«µДНЁС¶»ъЦЖЎЈPx4·ЙїШПµНіІЙУГuORBНЁС¶·ЅКЅЎЈ
uORB(Micro Object Request BrokerЈ¬Оў¶ФПуЗлЗуґъАнЖч)КЗ·ЗіЈЦШТЄЗТ№ШјьµДТ»ёцДЈїйЈ¬ЛьјзёєБЛХыёцПµНіµДКэѕЭґ«КдИООсЈ¬ЛщУРµДґ«ёРЖчКэѕЭЎўGPSЎўPPMРЕєЕµИ¶јТЄґУРѕЖ¬»сИЎєуНЁ№эuORBЅшРРґ«КдµЅёчёцДЈїйЅшРРјЖЛ㴦АнЎЈКµјКЙПuORBКЗТ»МЧїзЅшіМµДIPCЈЁInter
Process CommunicationЈ©НЁС¶ДЈїйЎЈ
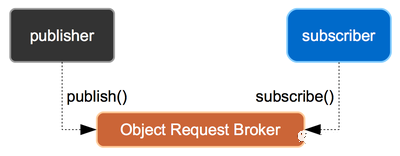
uORBµД·ўІј-¶©ФДЙијЖДЈКЅЈЁpublishЁCsubscribepatternЈ©
·ЙїШПµНіКЗ»щУЪNuttXКµК±ARMПµНіЈ¬¶шuORB¶ФУЪNuttX¶шСФЈ¬ЛьЅцЅцКЗТ»ёцЖХНЁµДОДјюЙи±ё¶ФПуЈ¬ХвёцЙи±ёЦ§іЦOpenЎўCloseЎўReadЎўWriteЎўIoctlТФј°Poll»ъЦЖЎЈНЁ№эХвР©ЅУїЪµДКµПЦЈ¬uORBМṩБЛТ»МЧЎ°µг¶Ф¶аЎ±µДїзЅшіМ№гІҐНЁС¶»ъЦЖЈ¬Ў°µгЎ±ЦёµДКЗНЁС¶ПыПўµДЎ°ФґЎ±Ј¬Ў°¶аЎ±ЦёµДКЗТ»ёцФґїЙТФУР¶аёцУГ»§АґЅУКХЎўґ¦АнЎЈ¶шЎ°ФґЎ±УлЎ°УГ»§Ў±µД№ШПµФЪУЪЈ¬ФґІ»РиТЄИҐїјВЗУГ»§КЗ·сїЙТФКХµЅДіМх±»№гІҐµДПыПў»тКІГґК±єтКХµЅХвМхПыПўЎЈЛьЦ»РиТЄµҐґїµД°СТЄ№гІҐµДКэѕЭНЖЛНµЅuORBµДПыПўЎ°ЧЬПЯЎ±ЙПЎЈ¶ФУЪУГ»§¶шСФЈ¬ФґНЖЛНБЛ¶аЙЩґОµДПыПўТІІ»ЦШТЄЈ¬ЦШТЄµДКЗИЎ»ШЧоРВµДХвМхПыПўЎЈ
uORBКµјКЙПКЗ¶аёцЅшіМґтїЄН¬Т»ёцЙи±ёОДјюЈ¬ЅшіМјдНЁ№эґЛОДјюЅЪµгЅшРРКэѕЭЅ»»ҐєН№ІПнЎЈ
·ЙїШЦРГїёцЅшіМ¶јїЙТФНЁ№эPublish/SubscribeЈЁ·ўІј/¶©ФДЈ©ДЈКЅУлЖдЛыЅшіМТФј°Зэ¶ЇЅшРРБ¬ЅУЎЈТФґ«ёРЖчУ¦УГіМРт·ўЛНґ«ёРЖчКэѕЭµЅЧЛМ¬№АјЖУ¦УГіМРтОЄАэЎЈЅшіМЈЁ»тХЯіЖЅЪµгЈ©НЁ№эГьГыµДЧЬПЯЅ»»»µДПыПўіЖЦ®ОЄЎ°ЦчМвЎ±Ј¬ФЪПµНіЦРЈ¬Т»ёцЦчМвЅц°ьє¬Т»ЦЦПыПўАаРНЈ¬АэИзЈєvehicle_attitude
ЦчМвґ«Кд°ьє¬ЧЛМ¬ЅЗЈЁ№цЧЄЎўё©СцєНЖ«єЅЈ©µДПыПўЎЈЅЪµгїЙТФФЪЧЬПЯЎўЦчМвЙП·ўІјТ»МхПыПў(Send data)
»тХЯ¶©ФДЧЬПЯЎўЦчМвЈЁReceive DataЈ©ЎЈНЁС¶Л«·ЅЦ®јдІўІ»ЦЄµАФЪУлЛНЁС¶Ј¬їЙТФґжФЪ¶аёц·ўІјХЯ»тТ»МхПыПўУР¶аёц¶©ФДХЯЈ¬ЅшіМµД·ўІјєН¶©ФДїЙТФФЪН¬Т»К±јдЈ¬ЦчМв¶ФПуФЪЧФЙнЧґМ¬±д»ЇК±Ј¬»бНЁЦЄЛщУР¶©ФДХЯ¶ФПуЈ¬К№ЛьГЗДЬ№»ЧФ¶ЇёьРВЧФјєµДЧґМ¬ЎЈХвЦЦЙијЖДЈКЅїЙТФ·АЦ№Лш¶ЁµДОКМвЈ¬іЈУГУЪ»ъЖчИЛјјКхЎЈОЄБЛ±ЈЦ¤ёЯР§Ј¬Т»МхЧЬПЯЙПКјЦХЦ»УРТ»МхПыПўЈ¬ІўЗТІ»К№УГ¶УБРґж·ЕЎЈ
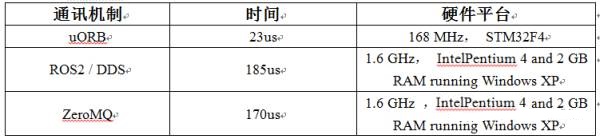
Px4№ЩНшёшіцµДјёЦЦіЈУГНЁС¶»ъЦЖК±јдСУіЩ¶Ф±ИЈє
uORBµДКµПЦО»УЪ№МјюФґВлµДsrc/modules/uORB/uORB.cppОДјюЈ¬ЛьНЁ№эЦШФШCDev»щАаАґЧйЦЇТ»ёцuORBµДЙи±ёКµАэЎЈІўЗТНкіЙRead/WriteµИ№¦ДЬµДЦШФШЎЈuORB
µДИлїЪµгКЗuorb_mainєЇКэЈ¬ФЪХвАпЛьјмІйuORBµДЖф¶ЇІОКэАґНкіЙ¶ФУ¦µД№¦ДЬЈ¬uORBЦ§іЦstart/test/statusХв3МхЖф¶ЇІОКэЈ¬ФЪ·ЙїШПµНіµДrcSЖф¶ЇЅЕ±ѕЦРЈ¬К№УГstartІОКэАґЅшРРіхКј»ЇЈ¬ЖдЛы2ёцІОКэ·Ц±рУГАґЅшРРuORB№¦ДЬµДЧФјмєНБРіцuORBµДµ±З°ЧґМ¬ЎЈ
ФЪrcSЦРК№УГstartІОКэЖф¶ЇuORBєуЈ¬uORB»бґґЅЁІўіхКј»ЇЛьµДЙи±ёКµАэЈ¬ ЖдЦРµДКµПЦґуІї·Ц¶јФЪCDev»щАаНкіЙЎЈНЁ№эinitµчУГНкіЙЙи±ёµДґґЅЁЈ¬ЅЪµгЧўІбТФј°ЕЙЗІАэіМµДЙиЦГµИЎЈ
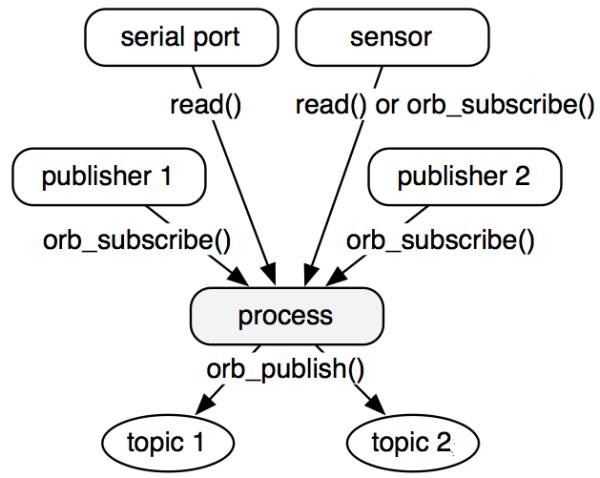
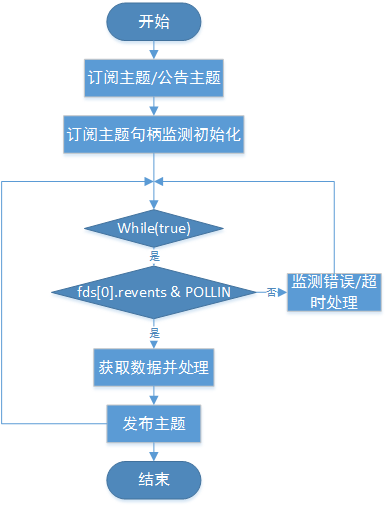
ПВНјКЗТ»ёцЙи±ё¶©ФД/·ўІјuorbПыПўµДБчіМНјЎЈ
µЧІгЗэ¶ЇЦРАаµДёЕДо
PX4ЦРІ»ЙЩіМРтКЗУГC++РґµДЈ¬ґуБїК№УГБЛАаµДёЕДоЎЈИзMPU6000ХвёцРѕЖ¬Ј¬УлSTM32µДSPIЅУїЪПаБ¬ЈЁјёёцґ«ёРЖч¶јКЗНЁ№эН¬Т»ёцSPIУлSTM32ПаБ¬Ј¬Ц»КЗУГCSТэЅЕАґјУТ»Зш·ЦЈ©ЎЈФЪsrc/drivers/device/spi.cppЦР¶ЁТеБЛSPIАаЈ¬¶шФЪMPU6000µДЗэ¶ЇФґОДјюЈЁsrc/drivers/mpu6000/mpu6000.cppЈ©ЦРЈ¬К№УГБЛјМіРµД·Ѕ·ЁґґЅЁБЛmpu6000АаЈє
class MPU6000 :public device::SPIЎЈЖдЛыјёёцУлSPIПаБ¬µДґ«ёРЖчТІКЗИзґЛЅшРРіхКј»ЇЎЈ
УР№Шpx4·ЙїШµДИнјюЙијЖЈ¬їЙТФїґПВ№ЩНшёшіцµДВЫОДЈє
Lorenz Meier,Dominik Honegger and Marc Pollefeys.
PX4: A Node-Based Multithreaded OpenSource Robotics
Framework for Deeply Embedded Platforms, ICRA (Int.
Conf. onRobotics and Automation) 2015. (to appear)
6 јёёцЛјїј
·ЙїШИнјюЦРДДР©ИООсУЕПИј¶ёЯЈї
єЬПФИ»ѕНКЗЗ°ГжЛщЅІµД»щ±ѕДЈїйЈ¬°ьАЁТЈїШКдИлЎўґ«ёРЖчКэѕЭ¶БИЎЎўЧЛМ¬№АјЖ/їШЦЖХвТ»АаЎЈµ±И»ХвТІЙијЖµЅ·ЙїШµДёчёцїШЦЖ»ШВ·ЛщРиµДёьРВЛЩВКОКМвµИЈ¬єуРш»бПкПёІыКцПВ·ЙїШЦРµДёчёцїШЦЖ»ШВ·ЎЈ№ШУЪУЕПИј¶їЙТФІОїґpx4·ЙїШЈє
1.ЈЁЦР¶Пј¶Ј©їмЛЩґ«ёРЖчЗэ¶ЇіМРт
2.їґГЕ№·/ПµНіЧґМ¬јаїШ
3.Зэ¶ЇЖчКдіцЈЁPWMКдіцЗэ¶ЇЖчПЯіМЈ¬IOCOMMS·ўЛНГьБоПЯіМЈ©
4.ЧЛМ¬їШЦЖЖч
5.ёьРВЛЩВКВэµДґ«ёРЖчЗэ¶ЇіМРтЈЁІ»ДЬЧиИыЧЛМ¬їШЦЖЖчЈ©
6.єЅВ·/О»ЦГїШЦЖЖч
7.Д¬ИПУЕПИј¶ - НЁУГУГ»§ґъВлЈ¬shellГьБоµИ
8.ИХЦѕјЗВјЈ¬ІОКэН¬ІЅіМРт
9.їХПРЅшіМ
·ЙїШИнјюµДёьРВЦЬЖЪЙијЖЈї
·ЙїШЦРУРБЅёц»щ±ѕµДјЖК±ЈєёьРВЦЬЖЪєНСУіЩЎЈТЄПл»сµГБјєГµДПµНіРФДЬЈ¬ѕН±ШРлјхЙЩСУіЩЎЈТ»°гЗйїцПВЈ¬СУіЩЙхЦБ±ИёьРВЦЬЖЪёьЦШТЄЎЄТтОЄґуСУіЩІъЙъПаТЖЎЈСУіЩФміЙµДПаТЖ»бИГДгКдіцґнОуµДїШЦЖБїЎЈ
ЛщТФ·ЙїШЦРЈ¬іэБЛЙијЖТ»ёц№М¶ЁµДёьРВЦЬЖЪЈ¬»№Ри№ШЧўСУіЩЎЈТ»ёц№М¶ЁЖµВКµДїШЦЖС»·Ј¬УРК±»бТтОЄСУіЩЈ¬µјЦВРФДЬєЬІоЎЈѕЩёцАэЧУЈєјЩЙиДгТФ100HzІЙСщЛЩВК¶БИЎґ«ёРЖчЈ¬ЧґМ¬№АјЖєНїШЦЖЖчТІ¶јКЗ100HzЎЈДЗГїТ»ІЅКдИлµДЧоґуСУіЩ/СУіЩКЗ10msЈї
БнНвЈ¬Из№ы·Ц±рЙијЖ3ёцС»·Ј¬ґ«ёРЖч¶БИЎЈ¬ЧґМ¬№АјЖЈ¬їШЦЖ»тХЯЅ«3ХЯ·ЕФЪТ»ёцИООсС»·АпЈ¬УРКІГґЗш±рЈї
500hzµД¶БИЎКэѕЭЈ¬ЧґМ¬№АјЖЈ¬ФЩЅшРРїШЦЖєН500hz¶БИЎКэѕЭЈ¬ЧґМ¬№АјЖЈ¬250hzїШЦЖБЅЦЦ·ЅКЅУРЗш±рВрЈїХв3ёцОКМвЈ¬ДїЗ°±КХЯТІГ»УРИ·ЗРµДґр°ёЈ¬ТтґЛѕНІ»РґБЛЈ¬БфЧчґујТЛјїјЈ¬їЙТФ»ҐПаЅ»Бчїґ·ЁЎЈ
ІвБїєЇКэФЛРРК±јдЈї
ФЪ·ЙїШЛг·ЁЦРЈ¬РиТЄУГµЅёьРВЦЬЖЪХвёц±дБїЈ¬µ±И»Ј¬Из№ыЛг·ЁФЛРРКЗ№М¶ЁЦЬЖЪЈ¬Фт±дБїµДЦµѕНКЗЛщЙи¶ЁµДЦЬЖЪЈ¬»№їЙТФґъВлЧФРРІвБїЈ¬ИзПВЛщКѕЎЈ

µ±И»Ј¬¶ФЛг·Ё¶шСФЈ¬ІЙУГ№М¶ЁµДІЙСщВК»№КЗјЖЛгіцАґµДІЙСщВКЈ¬ёцИЛѕхµГАнВЫЙПАґЅІЈ¬јЖЛгіцАґµДёьЧјИ·Ј¬У¦ёГКЗёьєГЈ¬µ±И»Из№ы№М¶ЁµДЦЬЖЪІ»іцґнЈ¬У¦ёГТІОЮґуµДУ°ПмЎЈ
ІвБї№М¶ЁЦЬЖЪЈї
±КХЯФшѕФЪ±аРґВг»ъ·ЙїШґъВлК±Ј¬ПлИ·ИППВЛщЙијЖµД№М¶ЁЦЬЖЪКЗ·сЧјИ·Ј¬ІЙУГБЛТ»ёц±ї°м·ЁЎЈФЪЦЬЖЪАпЈ¬ЕдЦГТ»ёцКдіцТэЅЕЈ¬ГїЦґРРТ»ґОЈ¬ТэЅЕµДµзЖЅИЎ·ґЈ¬И»єуУГКѕІЁЖч№ЫІмІЁРОЈ¬їґПФКѕµДЦЬЖЪКЗ·сУлЙи¶ЁµДТ»ЦВЈ¬КЗ·с»бІЁ¶Ї±д»ЇЎЈИз№ыІЁ¶Ї±д»ЇєЬґуЈ¬ЛµГчґъВлЦРУРИООсі¬К±БЛЈ¬ХыёцґъВлФЛРРіцґнЎЈ |









