| БрМЭЦМі: |
БОЮФЬНЬжЮоШЫЛњЃЈUAVЃЉЯЕЭГЕФШэМўМмЙЙЃЌЖдЮоШЫЛњЯЕЭГЩшМЦвбЗЂБэЕФШэМўМмЙЙЗНУцЮФ
ЯзАДЪБМфНјаазлЪігыЬНЬжЁЃ
РДздгкжЊКѕ,гЩЛ№СњЙћШэМўAnnaБрМЁЂЭЦМіЁЃ |
|
БОЦЊжївЊЙизЂжИЛгКЭПижЦШэМўЃЌВЂЬжТлЧщБЈЁЂМрЪгКЭеьВьШэМўМмЙЙЕФ ВювьЃЌЦфФПЕФЪЧЮЊСЫГЪЯжЮоШЫЛњШэМўМмЙЙЪЧШчКЮбнБфЕНФПЧАзДЬЌЁЃАќРЈДгММЪѕШэМўМмЙЙЙцдђ
ЕФдчЦкЗЂеЙЕНЕБЧАЮоШЫЛњШэМўдкЛЅВйзїадЁЂЭЈгУадЁЂЪгЦЕбЙЫѕММЪѕЕШЗНУцЮЪЬтЃЌР§ШчВЮПМЮФЯзЁЖШэМўМмЙЙЃКвЛУХаТаЫбЇПЦЕФеЙЭћЁЗЃЌGarlan,
D. and Shaw, M. (1996)1ЃЛЁЖеНГЁжаЕФУЭЧнЁЂ ВЖЪГепЁЂТгЪГепМАУРЙњзюаТЮоШЫЛњЁЗYenne,
W. (2010)2ЃЛЁЖЖЏЬЌЯЕЭГЕФШэМўЪЙФмПижЦКЭаХЯЂММ ЪѕЁЗSamad, T. and Bala,
G. (2003)3ЃЛЁЖзджїЮоШЫЛњЪЕбщЕФЗжВМЪНМмЙЙЁЗDoherty, P., Haslum P.,Heintz,
F., Merz, T., Nyblom, P., Persson, T., and Wingman,
B., (2004)4;ЁЖЮоШЫЛњжЧФмЯЕЭГШэ МўЁЗSinsley, G., Long, L., Niessner,
A., and Horn, J.(2008)5вдМАЁЖЮоШЫа§вэЛњЯЕЭГЁЗCai, G., Chen, B.,
and Lee, T. (2011)6ЁЃбаОПБШНЯСЫЕБЧАЮоШЫЛњПЊЗХЪНШэМўМмЙЙГЬађМАЦфЦНЬЈШчВЖЪГепЁЂШЋЧђ
гЅЁЂЗЩТэЁЃЭъећЕФВЮПМЮФЯзМћИНТМAЁЃ
1 МђНщ
ЁАМмЙЙПЩЖЈвхЮЊзщМўЕФНсЙЙМАЫќУЧжЎМфЕФЙиЯЕЃЌвдМАЙцЗЖЦфЩшМЦКЭКѓајНјЛЏЕФддђКЭжИФЯЁЃМђбджЎЃЌМмЙЙЪЧЙЙдьгыМЏГЩШэМўУмМЏаЭЯЕЭГЕФЩюВуДЮЩшМЦ7ЁАЁЃвВПЩГЦЦфЮЊШчКЮЪЕЪЉНтОі
ЗНАИЕФвЛИіВпТдадЩшМЦЃЈР§ШчЛљгкзщМўЕФЙЄГЬБъзМЁЂАВШЋЃЉКЭНтОіЗНАИзіЪВУДЕФЙІФмадЩшМЦЃЈШчЫуЗЈЁЂЩшМЦФЃЪНЁЂЕзВуЪЕЯжЃЉЁЃ
1996 Фъ Garlan КЭ Shaw дкЁЖШэМўМмЙЙЃКвЛУХаТаЫбЇПЦЕФеЙЭћЁЗ1 жааДЕНМмЙЙЮЪЬтАќРЈЃКЯЕЭГзщМўЙЙГЩЕФзщжЏЁЂШЋОжПижЦНсЙЙЁЂЭЈаХавщЁЂЭЌВНКЭЪ§ОнЗУЮЪЕШЁЃЫћУЧбаОПСЫШэМўПЊЗЂепГЃгУЕФЯЕЭГзщжЏФЃЪНЃЌАќРЈЪ§ОнСїЯЕЭГЁЂЕїгУМАЗЕЛиЯЕЭГЁЂащФтЛњЁЂвдЪ§ОнЮЊжааФЕФЯЕЭГЃЈЪ§ОнПтЃЉЁЂЗжВМЪННјГЬКЭЬиЖЈСьгђЕФШэМўМмЙЙЁЃеыЖдИјЖЈЮЪЬтЛђСьгђЃЌШЗЖЈзюгХауЕФМмЙЙЪЧвЛИігРКуЕФЬєеНЁЃGarlan
КЭ Shaw еЙЪОСЫШчКЮЙЙдьвЛИіПЩБфМмЙЙЕФЩшМЦПеМфЃЌвдМАШчКЮНЈСЂЩшМЦддђРДИљОнЙІФмашЧѓбЁдёгІгУЯЕЭГЁЃ
Garlan КЭ Shaw СаГіСЫвЦЖЏЛњЦїШЫЕФЛљБОЩшМЦашЧѓЃЌШчЃКЃЈ1ЃЉЩїЫМЙцЛЎКЭЗДгІЪНааЮЊЃЛЃЈ2ЃЉШнаэВЛШЗЖЈадЃЛЃЈ3ЃЉПМТЧЮЃЯеЃЛЃЈ4ЃЉСщЛюадЧПЁЃеыЖдетаЉвЊЧѓЃЌЫћУЧЦРЙРСЫЫФжж
гУгквЦЖЏЛњЦїШЫЕФМмЙЙЃЌАќРЈПижЦЛиТЗЃЈcontrol loopЃЉЁЂЗжВуЃЈlayersЃЉЁЂвўЪНЕїгУЃЈimplicit
invocationЃЉЁЂКкАхЃЈblackboardЃЉЃЌШчЭМ 1 ЫљЪОЁЃБеЛЗПижЦНтОіЗНАИЭЦМігУгкВЛДІРэИДдгЭтВПЪТМўЕФМђЕЅЛњЦїШЫЯЕЭГЁЃЗжВуЙЙМмФмКмКУЪЕЯжЙЙМўЕФзщжЏЃЌЕЋЪЧдкЪЕЪБЛЗОГжаДІРэЭтВПЪТМўЪБЦфЗДгІЙ§Т§ЁЃЕкШ§Иі
НтОіЗНАИвўЪНЕїгУЮЇШЦЪТМўДІРэЪЕЯжЃЌгУгкШЮЮёПижЦМмЙЙЃЈTCAЃЉЁЃ
ЭЦМі TCA гУгкНЯИДдгЕФЛњЦїШЫЯюФПЃЌВЂвбдкжкЖрвЦЖЏЛњЦїШЫЩЯЕУЕНгІгУЁЃTCA ЮЊадФмЁЂШн ДэЁЂАВШЋадКЭВЂЗЂадЬсЙЉСЫвЛЬзЭъећЕФШЮЮёаЕїЛњжЦКЭЙцЖЈЁЃTCA
МмЙЙгЩЮЛгкЭЌвЛВуДЮЕФШЮЮёЛђШЮЮёЪїзщГЩЁЃдкдЫааЙ§ГЬжаШЮЮёЪїЛсзїКмЖрЖЏЬЌЕїећвдЪЪгІЛЗОГЬѕМўКЭЛњЦїШЫзДЬЌЕФИФБфЁЃЕкЫФжжНтОіЗНАИКкАхЙЙМмгЩвЛИіжааФКкАхЛђ
Ъ§ОнПтЙЙГЩЃЌИКд№НгЪеКЭЗЂЫЭУќСюЁЂЙВЯэЪ§ОнКЭНтОіГхЭЛЁЃЫќжЇГжВЂЗЂадЧвгавьГЃДІРэГЬађРДДІРэВЛШЗЖЈадЁЃ

ЭМ1 вЦЖЏЛњЦїШЫМмЙЙРраЭ
2 дчЦкЮоШЫЛњ
дч ЦкЮоШЫЛњУЛгаШэМўМмЙЙЃЌЪЧЭЈЙ§ЮоЯпЕчЃЈRCЃЉПижЦММЪѕЗЂеЙЦ№РДЕФЁЃдкЕкЖўДЮЪРНчДѓ еНЦкМфНЈдьСЫЪ§МмЪЕбщЮоШЫЗЩЛњгУгкдкдЖДя
100 гЂРяЗЖЮЇФкВтЪдКНПегуРзЁЃЖўеНКѓетаЉЪЕбщ ЗЩЛњдк RC ЗЩЛњАЎКУепСьгђЕУЕНМЬајЗЂеЙЁЃRC ЗЩЛњЪЧЯжДњЮоШЫЛњЕФЛљЪЏЁЃ1940
ФъЧАКѓЃЌRC ЗЩЛњЗЂеЙЮЊ RC ПежаАаЛњЃЈКѓРДзїЮЊеьВьЦНЬЈЃЉЃЌЗўвлгкУРЙњПеОќЃЈUSAAFЃЉ2ЁЃ
Ек вЛДњОќгУЮоШЫЛњГЄЖШНщгк 8 гЂГпЃЈftЃЉ8 гЂДчЃЈinЃЉжС 9 гЂГп 3 гЂДчжЎМфЃЌвэеЙГЄЖШНщ
гк 12 гЂГп 3 гЂДчжС 11 гЂГп 6 гЂДчжЎМфЁЃЫќУЧЕФЫйЖШДг 85 гЂРяУПаЁЪБЃЈmphЃЉЬсЩ§жС
140mphЃЌ ЧвФмајКН 1 аЁЪБЁЃШчИНТМ A Бэ 1 ЫљЪОЃЌгЩЮоЯпЕчЙЋЫОЃЈ1952 ФъБЛХЕЫЙТоЦеЙЋЫОЪеЙКЃЉПЊЗЂЕФ
OQ-1 ЪЧЕквЛМмЮоЯпЕчПижЦЕФПежаАаЛњЃЈКѓИФЮЊеьВьгУЃЉЃЌ1940 ФъБЛУРЙњПеОќЪеЙКЁЃ
20 ЪРМЭ 60 ФъДњЃЌУРЙњПеОќЃЈUSAFЃЉПЊЪМЪЙгУЁАЛ№ЗфЁБКЭЁАЩСЕчГєГцЁБЃЌЫќУЧЪЧУРЙњеьВьЪЗЩЯЗЩааЪБМфзюГЄЕФ
RC ЗЩЛњЁЃдк 20 ЪРМЭЃЌЮоШЫЛњжївЊгУгкПежаАаЛњКЭеьВьЁЃAQM-34LЁАЩС ЕчГєГцЁБдкЪЙгУЪЕЪБЕчЪгЭМЯёЗНУцЪЧ
21 ЪРМЭЮоШЫЛњЕФЯШЧ§ЁЃЫќЪдгУЙ§ЕчзгРзДяИЩШХЦїКЭ AN/ALE-38 ВЬѕЭЖЗХЦїЁЃ1995 ФъЃЌУРЙњПеОќдкФкЛЊДяжнгЁЕкАВШЊИЈжњЛњГЁЃЈПЫРяЦцПеОќЛљЕиЃЈAFBЃЉ
ГЩСЂЕквЛИіЮоШЫЛњжаЖгЁЊЁЊЕк 11 еьВьжаЖг 2ЁЃ
20 ЪРМЭ 70 ФъДњжС 80 ФъДњРфеНЦкМфЮоШЫЛњБЛКіЪгЁЃЖјЮРаЧФмСІЕФЯджјдіЧПЃЌЕН 90 ФъДњжаЦкЮоШЫЛњвбГЩЮЊеНГЁВЛПЩЗжИюЕФвЛВПЗжЁЃ
3 ЯжДњЮоШЫЛњ
AЃЎ21 ЪРМЭЕквЛДњЮоШЫЛњ 1
ЪРМЭжЎНЛЃЌЮоШЫЛњЗЂеЙЕУвцгкЮРаЧФмСІЕФдіЧПКЭМЦЫуЛњДІРэФмСІЁЂЫуЗЈЗЂеЙЁЂЪЕЪБЯЕЭГгІгУЁЂЛњЕчЗЩПиЯЕЭГЁЂЪгОѕ/РзДяЯЕЭГЁЂЕМКНЯЕЭГЁЂМЦЫуЛњМЏГЩЮфЦїЯЕЭГЗНУцЕФММЪѕНјВНЁЃЕк
вЛДњЕФЫљгаЙІФмгАЯьСЫШэМўМмЙЙЕФЗЂеЙЁЃ
21 ЪРМЭЕквЛДњЮоШЫЛњЦ№ГѕгЩУРЙњЙњЗРВПгУгкПежаАаЛњМАжДааеьВьШЮЮёЃЌКѓРДЮоШЫЛњНЧЩЋ ЭиеЙжСдЖГЬеНТдадШЮЮёЃЌзюКѓЪЧДђЛїШЮЮёЁЃгЩгкШЮЮёЕФЭиеЙЃЌ1997
ФъУРЙњЙњЗРВПжиаТВЩгУЁАQЁБ зїЮЊЕЃИКдЖГЬеНТдДђЛїШЮЮёЮоШЫЛњЕФжїгУДњКХЁЃ
гУ гкГЄКНЪБеьВьЕФ Northrop Grumman ЙЋЫО RQ-4 ШЋЧђгЅЮоШЫЛњЪЧдкБОЪРМЭГѕОќЗНЗўвлЕФ
зюДѓЮоШЫЛњЁЃЛњЩэГЄ 44 гЂГпЃЌвэеЙ 117 гЂГпЃЌзмжи 25600 АѕЁЃGeneral Atomics
ЙЋЫОЕФВЖЪГеп вВгУгкеьВьШЮЮёЃЌзАБИ Northrop Grumman ЙЋЫОЕФ TESAR КЯГЩПзОЖРзДяЃЈSARЃЉЃЌОпга
1 гЂГп ЗжБцТЪКЭШЋЬьКђеьВьФмСІЁЃ2001 ФъВЖЪГепМгзАСЫМЄЙтжЦЕМЕФ AGM-114ЁАЕигќЛ№ЁБПеЕиЗДзАМз
ЕМЕЏГЩЮЊЕквЛМмЮфзАЮоШЫЛњЃЌВЂдкЁАГжОУздгЩааЖЏжаЁБгЩУРЙњЧщБЈОжЃЈCIAЃЉЪзДЮЪЙгУЁЃУР ЙњКЃОќТНеНЖгЃЈUSMCЃЉЕФ
RQ-2A ЯШЗцЃЈ1980ЃЉКЭУРЙњТНОќ RQ-5A СдШЫЃЈ1995ЃЉвВЭЌбљдк еНГЁЩЯЕУЕНМьбщЁЃ21
ЪРМЭЕквЛДњЮоШЫЛњЕФММЪѕЯИНкМћИНТМ A жаЕФБэ 2ЁЃ
ЕквЛДњЕФ Lockheed Martin ЙЋЫОЁАаЧЁБКЭЁАШЋЧђгЅЁБНшжњШЋЧђЖЈЮЛЯЕЭГОпБИЭъШЋПЩБрГЬПи
жЦЯЕЭГЃЌФмЪЕЯжДгЦ№ЗЩЕНзХТНЕФзджїПижЦЃЌвВПЩЪЙгУЭЈгУЕиУцПижЦеОЁЃ
BЃЎ21ЪРМЭЕкЖўДњЮоШЫЛњ 2
21ЪРМЭЕкЖўДњЮоШЫЛњЕУвцгквЛДњЛњЕФММЪѕНјВНКЭдижиЁЂЖЈЮЛЁЂеьВьЕШШЮЮёФмСІЕФЯджјЬсЩ§ЁЃЁАЛ№СІеьВьБјЁБЮоШЫЛњЪЧа§вэЛњЃЌЦфЗЩааПижЦБШЙЬЖЈвэЛњИќИДдгЁЃЁАЛ№СІеьВьБјЁБКЭX-47BЩшМЦЖЈЮЛЪЧДЌЩЯзджїзївЕЃЌетЛђаэЪЧШэМўМмЙЙЕФзюДѓЬєеНЁЃ
2003 Фъ4дТЃЌУРЙњПеОќКЭУРЙњКЃОќЦєЖЏЁАСЊКЯЮоШЫПееНЯЕЭГЁБЃЈJ-UCASЃЉМЦЛЎЁЃЮоШЫЛњЬсЙЉМЄЙтФПБъжИЪОЃЌзщжЏНјаабЙжЦЕаЗНПеЗРЃЈSEADЃЉШЮЮёЃЌДђЛїНфБИбЯ
УмЁЂИпМлжЕФПБъЁЃЁАдчдк1997ФъЃЌЙњЗРВПЛњдиеьВьАьЙЋЪвМмЙЙМЏГЩзмМрПеОќЩЯаЃMike FrancisдјЖдКНПежмПЏЕФDavid
FulghumЫЕЃЌЫћЕФЛњЙЙЖдЮфзАЮоШЫЛњКЭФмжДааЭъећШЮЮёЕФЮфзАеьВьЛњМАМпЛїЛњЖМгаЧПСваЫШЄЁЃЁБ2ЮоШЫЛњВЂВЛЪЧЯћКФЦЗЗДЖјЁАМѕЩйЯћКФЁБЁЊЁЊПЩвдЫ№ЪЇвЛМмЮоШЫЛњЖјЗЧвЛМмТњдиЛњзщШЫдБЕФЗЩЛњЁЃ
ШчИНТМAжаБэ3ЕквЛВПЗжЫљЪОЃЌвЛЗнВЈвєX-45AММЪѕЫЕУїЪщжаЯдЪОЦфзюДѓЦ№ЗЩжиСПЮЊ12190АѕВЂгк2004Фъ3дТ24Шедк35000гЂГпИпПевд442mphЕФЗЩааЫйЖШГЩЙІЭЖЯТвЛПХ250АѕЕФЖшадеЈЕЏЁЃ2КѓајЕФX45-CЩшМЦгУгкЗРЪиЃЌзюДѓЦ№ЗЩжиСП26500АѕЃЌПЩЙвдиСНПХGBU-31СЊКЯжБНгЙЅЛїеЈЕЏЃЈJDAMЃЉжЦЕМЕМЕЏЁЃ
УР ЙњКЃОќЮоШЫеНЖЗЛњ - КЃОќЃЈUCAV-NЃЉМЦЛЎЕФбљЛњNorthrop GrummanЙЋЫОЕФX-47AЗЩТэгыУРЙњПеОќЮоШЫеНЖЗЛњЃЈUSAF
UCAVЃЉЕЃИКЯрЕФЪЙУќЁЃетЪЧвЛМмвўаЮЮоШЫеНЖЗЛњЃЌжДааМрЪгЁЂДђЛїКЭбЙжЦЕаЗНПеЗРШЮЮёЃЌЕЋжЛВПЪ№дкКНФИЩЯЁЃX-47AЗЩТэЮоШЫЛњММЪѕЫЕУїЪщЯдЪОЦфзюДѓЦ№ЗЩ
жиСПЮЊ5500АѕЁЃX-47BЛњЩэГЄ38.2гЂГпЃЌвэеЙ62.1гЂГпЃЌзюДѓЦ№ЗЩжиСПЮЊ44567АѕЃЌдижиЮЊ4500АѕЃЌПЩЙвдиСНПХGBU-31
JDAMжЦЕМЕМЕЏЁЃЁАX-47BгыX-47AЯрБШЃЌајКНЪБМфИќГЄЁЂдкКНФИЩЯНјаазджїЕЏЩфЦ№ЗЩКЭНЕТфЙ§ГЬжаОпгаИќЧПЕФЩњДцФмСІКЭИќКУЕФЕЭЫйПеЦјЖЏСІбЇЗЩааад
ФмЁЃЁБ2
2003 Фъ4дТUCAVМЦЛЎзЊБфЮЊСЊКЯЮоШЫПееНЯЕЭГЃЈJ-UCASЃЉМЦЛЎЃЌАќРЈУРЙњПеОќЕФX-45CКЭУРЙњКЃОќЕФX-47BЁЃ2006ФъX-45ПЊЗЂжежЙЃЌСЊКЯМЦ
ЛЎгжИФЮЊУРЙњКЃОќUCAS-NМЦЛЎЁЃдкЙйЗН2007ЧщПіМђБЈжаЃЌУРЙњПеОќЩљГЦЃКЁАЫљгаЮоШЫЛњдкжИЖЈЕФаЕїИпЖШЩЯжДааШЮЮёЪБЃЌБиаыгавЛЬзЭЈгУЯЕЭГвдЪЕЯжБу
НнЁЂАВШЋЁЂЮоЗьЕФВйзїЁБЁЃ2ЫљжИЗЩЛњАќРЈУРЙњПеОќMQ-1ЁАВЖЪГепЁБЃЌRQ-4ЁАШЋЧђгЅЁБЃЌMQ-9ЁАЫРЩёЁБКЭУРЙњКЃОќЕФЙугђКЃЩЯМрЪгЃЈBAMSЃЉЯЕЭГ2ЁЃ
УР ЙњКЃОќТНеНЖгЕФMQ-8BNorthrop GrummanЙЋЫОЁАЛ№СІеьВьБјЁБЮоШЫа§вэЛњгк2002ФъПЊЗЂЃЌжМдкЫьааЖржжШЮЮёЃЌОпгазджїзХНЂКЭНЂЩЯЦ№ЗЩФмСІЃЌзАБИЙтЕч/КьЭтЯЕЭГЁЂМЄЙтжИЪОЦїЃЌВЂЮЊЗД
ЫЎРззАжУдіМгСЫдиКЩЁЃДЫаЭЮоШЫЛњШЮЮёАќРЈеНГЁЙмРэЁЂЩњЛЏЮфЦїеьВтЁЂаХКХЧщБЈЁЂЕчзгеНЁЂеНГЁЫбОШЁЂЭЈаХКЭЪ§ОнжаМЬЁЂаХЯЂеНЁЂЗДНЂЕМЕЏЗРгљКЭЗДЧБЁЃMQ-9B
ЪЧа§вэелЕўЪБЛњГЄ22.87гЂГпЃЌа§вэжБОЖ27гЂГп6гЂДчЃЌзмжи3150АѕЁЃетЪЧЕквЛМмПЩдквЦЖЏНЂДЌЩЯНЕТфЕФЮоШЫжБЩ§ЛњЃЌгк2009ФъЪзДЮзїеНВПЪ№2ЁЃ
УРЙњКЃОќТНеНЖгЕФInsitu/ВЈвєЙЋЫОЁАЩЈУшгЅЁБЮоШЫЛњЪЧвЛМмДѓКНЪБеНЪѕеьВьЙЬЖЈвэЛњЁЃгк2002ФъЪзДЮЗЩааЃЌЦф24аЁЪБЕФајКНФмСІдЖДѓгкЦфЫћЯрЫЦГпДчЕФЮоШЫЛњЁЃзюДѓЦ№ЗЩжиСПЮЊ44АѕЃЌгЕгазджїЗЩааЃЈАДеедЄЖЈКНЯпЃЉКЭНЂдижДааШЮЮёФмСІ2ЁЃ
УР ЙњКЃОќЕФMQ-4CЙугђКЃЩЯМрЪгЃЈBAMSЃЉЪЧвЛжжЖргУЭОЮоШЫЛњЯЕЭГЃЈUASЃЉЃЌПЩгУгкЙЅЛїжЇдЎЁЂаХКХЧщБЈвдМАЭЈбЖжаМЬЁЃMQ-4C
BAMS UASЕФШЮЮёАќРЈКЃЩЯМрЪгЁЂЕаЗНеНГЁаХЯЂЪеМЏЁЂеНГЁЛйЩЫЦРЙРЁЂИлПкМрЪгЁЂЭЈаХжаМЬЃЌвдМАжЇдЎвдЯТШЮЮёЃККЃЩЯЗтЫјЁЂУцЩЯзїеНЁЂеНГЁЙмРэЁЂеыЖдКЃЩЯКЭБѕКЃЕФДђ
ЛїШЮЮёЁЃдк2008ФъЕФКЯЭЌРяЃЌMQ-4C BAMS UASВЩгУвЛжжNorthrop GrummanЕФRQ-4ШЋЧђгЅКЃОќИФНјаЭЃЌзАБИга360ЁуЖрЙІФмжїЖЏДЋИаЦїЃЈMulti-Function
Active SensorЃЌMFASЃЉЃЌетжжДЋИаЦїЪЧвЛжжжїЖЏЕчЩЈУшеѓСаРзДяЃЈactive electronically
scanned array ЃЌAESAЃЉЃЌвдМАКЃОќЬижЦЕФЕиУцеО2ЁЃ
4 МмЙЙНјЛЏ
2003ФъЃЌдкУРЙњЙњЗРИпМЖбаОПЙцЛЎОжЃЈDARPAЃЉЕФжЇГжЯТЁЊЁЊзЪжњЯюФПЮЊШэМўЪЙФмПижЦЃЈSoftware
Enabled ControlЃЌSECЃЉЃЌSamadКЭBalas3БрМСЫвЛВПбЇЪѕзЈжјЁЃдкЕБЪБЃЌОќгУЮоШЫЛњжЛФмППдЄЯШБрГЬЛђвЃПиВйзїЁЃдкSECЯюФПжаЃЌФПБъЪЧЪЙЮоШЫЛњЁАздЖЏЕижДааИпадФмЛњЖЏЁЂЖЏЬЌЕїећТЗЯпЁЂЬНВтВЂЙцБмЭўаВЁЂБцЪЖВЂаЃе§ЙЪеЯЁЂЦ№ЗЩНЕТфЁЂШнШЬМЋЖЫЛЗОГБфЛЏЁЁАЁЃ3дк
SECЯюФПжаЃЌФПЕФЪЧНЋЯШНјПижЦгывЛИігЩПЊЗХПижЦЦНЬЈЃЈOpen Control PlatformЃЌOCPЃЉЪЕЯжЕФЯШНјМЦЫуМЏГЩЦ№РДЃЌOCPЪЙгУЩЬгУЯжЛѕЃЈCOTSЃЉзщМўКЭЗЧзЈгаНгПкЁЃUAVПижЦгІгавЛИідкЯпгХЛЏв§ЧцЃЈЮЪЬтЧѓНтЫу
ЗЈЃЉЃЌгЩгкЗЩЛњЕФЪЕЪБПьЫйЖЏЬЌЬиадЃЌжЎЧАЕФДЫРрЫуЗЈдкМЦЫуЩЯЪЧЮоЗЈЪЕЯжЕФЁЃSamadКЭBalasжИГіЁАЕБЧАЕФМЦЫузЪдДзувдЪЕЯжИДдгЕФзДЬЌКЭФЃаЭгХЛЏЁЃЁБ3
Ыћ УЧЭЌЪБЙлВьЕНЃЌвЛИібЯИёЖЈвхЕФВуМЖМмЙЙПЩвдЪЕЯжЙІФмЗжИюЃЌШчШЮЮёдйЙцЛЎЁЂТЗЯпгХЛЏЁЂЭўаВЙцБмЕШЃЌетаЉЙІФмПЩвдИпаЇЕиМЏГЩЕЋадФмЛсгаЫљЫ№ЪЇЁЃОЁЙмШчДЫЃЌетаЉ
ВуМЖНсЙЙШдЛсЯожЦЯьгІЫйЖШЃЌвђДЫЫћУЧНЈвщбАевЬцДњЗНАИЃЌШчдкЩњЮябЇжаЫљЗЂЯжЕФФЧаЉЁЃЫћУЧзюЛЕЕФДђЫуЪЧЁЊЁЊзюжеЗЂЯжНіНіНсКЯПижЦЙЄГЬКЭМЦЫуЛњПЦбЇЕФбаОПНЋЛс
ЪЙUAVЕФВйзїЗНАИБфЕУИДдгЁЃ
A. ПЊЗХПижЦЦНЬЈ
PaunickaЕШ11зї ЮЊSECЯюФПзщГЩдБЬсЙЉСЫвЛИіПЊЗХПижЦЦНЬЈЃЈOpen Control
PlatformЃЌOCPЃЉЃЌЦНЬЈДјгаКмЖрЪЕЪБЯЕЭГгІгУЗўЮёЃЌПЩЙЉПижЦЙЄГЬЪІЩшМЦЗТецЁЃЦНЬЈВЩгУвЛжжМДВхМДгУЕФЩшМЦЃЌвђДЫШэМўзщМўПЩвдгЩВЛЭЌЕЅЮЛдкВЛЭЌЕФ
ЪБМфНјааПЊЗЂЁЃДЫгЩВЈвєЙЋЫОСьЕМПЊЗЂЃЌВЂЛљгкВЈвєBold StrokeШэМўЃЌжаМфМўгЩЛЊЪЂЖйДѓбЇПЊЗЂЁЃ
OCPЪЧвЛжжУцЯђЖдЯѓЕФШэМўЛљДЁЙЙМўЃЌЁАЬсЙЉвЛЬѕНЋПижЦЩшМЦПьЫйзЊЛЛЮЊзРУцЛђЧЖШыЪНФПБъДњТыЕФТЗОЖЃЌЫќЪЙЕУПижЦЩшМЦЪІПЩвдзЈзЂгкПижЦЩшМЦЖјЗЧМЏГЩЁЂЭЈаХЁЂЗЂВМЁЂвЦжВЁЂжДааЁЂЕїЖШЁЂЯЕЭГХфжУКЭзЪдДЙмРэЕШШэМўЩшМЦЮЪЬтЁЃЁБ11OCP
ЕФФкКЫВЩгУСЫЙЋЙВЖдЯѓЧыЧѓДњРэМмЙЙЃЈCommon Object Request Broker ArchitectureЃЌCOBRAЃЉЃЌЫќЛљгквЛИігУгкШЮЮёКНЕчЯЕЭГЕФЪЕЪБЧЖШыЪНжаМфЦНЬЈМАПЊЗХБъзМЁЃ
OCPАќРЈЃК1ЃЉжаМфМўЛљгкЪЕЪБCORBA (Copyright ? 2002, Object
Management Group, Inc.)ЃЌЬсЙЉвЛИіЭЈаХЭјТчНЋЖдЯѓАДclient/serverЙиЯЕСЌНгжСзщМўЃЛ2ЃЉЗТецЛЗОГЃЛ3ЃЉЙЄОпМЏГЩжЇГжЃЛ4ЃЉПижЦгІгУГЬађНгПк
ЃЈApplication Programmer Interface ЃЌAPIЃЉЁЃOCPжаМфМўВЩгУC++БраДЃЌВЂЬсЙЉвЛИіpublish/subscribeЛЗОГЃЌПЩдкжїЛњЛђЦфЫћЗжВМЪНМЦЫуЛњдЫааЖјВЛБиаоИФдДДњТыЁЃ
CORBAвВПЩвдЬсЙЉвЛИіУќУћЗўЮёЦїМьЫїВЂДцДЂжИЯђвЦЖЏзщМўЕФв§гУЁЃДЫЗўЮёМАЦфЫћШчЭМ2ЫљЪО11ЁЃВЈвєЪЙгУСЫвЛИіЗЧГЃРрЫЦгкCORBAЕФжаМфМўдкЫћУЧЕФF-15ЁЂF/A-18ЁЂAV-8BЁЂT-45еНЖЗЛњЩЯЃЌвдМАDARPA/USAF
ЮоШЫзїеНЗЩЛњЃЈUCAVЃЉЁЃ

ЭМ2 OCPВуМЖНсЙЙЃЈ2003ЃЉ11
B. WITASЗжВМЪНUAVМмЙЙ
DohertyЕШдк2004ФъеЙЪОСЫЁАвЛжжгУгкЮоШЫЛњЪЕбщЕФЗжВМЪНМмЙЙЁБ4ЃЌ вджЇГжжЧФмФмСІЕФПЊЗЂЁЃДЫЗжВМЪНМмЙЙЪЙгУCOBRAзїЮЊЛљДЁЙЙНЈгУгкМДВхМДгУЕФШэгВМўЛЗОГЃЌВЂЧвЛљгквЛжжвдЗДгІЮЊжааФЃЈreactive
concentricЃЉЕФШэМўПижЦЗНЗЈЁЃЫћУЧдкЭпТзБЄаХЯЂММЪѕМАзджїЯЕЭГЪЕбщЪв(WITAS)ЕФЮоШЫЛњЯюФПРяЪЙгУСЫДЫЗжВМЪНМмЙЙЁЃWITASЪЧвЛИіаЁаЭ
-UAVжБЩ§ЛњЃЌгУгкМрВтКЭМрЪгЁЂНєМБОШдЎдЎжњЁЂЩугАЗўЮёКЭВтСПЁЃЪЕбщЦНЬЈЪЧвЛМмYamaha RMAXЃЌГЄЖШЮЊ11.81
ftЃЌзюДѓЦ№ЗЩдиКЩЮЊ209 lbsЁЃЫћУЧзюДѓЕФЩшМЦЬєеНЪЧПижЦЯЕЭГгаЖрИіПижЦФЃЪНЃЌПЩгЩМмЙЙМЄЛювдЖЏЬЌЕїгУЁЃДЫЩшМЦЕФШэМўМмЙЙАќРЈвЛИіЩїЫМЁЂЗДгІКЭПижЦВПЗжЃЌвђДЫВЛдйЪЧвЛИіЗжВуЕнНз
НсЙЙЖјЪЧвЛИіЁАвдЗДгІЮЊжааФЁБЕФМмЙЙЁЃДЫЗДгІжааФЕФМмЙЙЪЧвЛИіИпЖШЗжВМЁЂЫЩЩЂёюКЯЁЂВЂЗЂЕФМмЙЙЃЌОпгаКмЖрЗДгІПижЦКЭВЂЗЂдЫааЕФЗўЮёНјГЬЁЃCORBAЪЧвЛИі
НЋЖдЯѓКЭзщМўСЌНгЦ№РДЕФжаМфМўЃЌЫќЭЈЙ§вЛИіЭЈбЖЗўЮёНЈСЂclient/serverЙиЯЕЁЃЭМ3ЫљЪОЮЊWITASМмЙЙЕФвЛаЉЩЯВуШэМўзщМўЁЃ
ЭМ 3 ЗжВМЪНUAV WITASМмЙЙЕФШэМўзщМў(2004)4
C. ARL/PSUжЧФмПижЦЦї
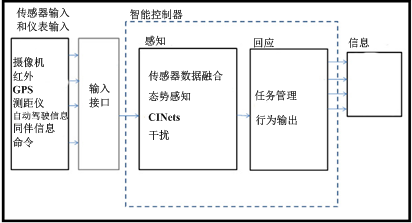
SinsleyЁЂLongЁЂNiessnerКЭHorn гк20085ЬНЬжСЫвЛжжUAVШэМўЕФМШжЧФмгжзджїЕФЛљгкааЮЊЕФМмЙЙЃЌLongЕШШЫ9ЗЂ
БэСЫЖрИіПЩгУгкЮоШЫЛњгІгУШэМўМмЙЙЕФШЋУцРњЪЗЛиЙЫ(1986-2002)ЃЈетаЉМмЙЙЖМШБЗІбЇЯАФмСІЃЉЁЃ2008UAVжЧФмЯЕЭГШэМўбаОПВЩгУСЫБіЯІЗЈФсбЧжн
СЂДѓбЇгІгУбаОПЪЕбщЪвЕФжЧФмПижЦЦїЃЈICЃЉМмЙЙЁЃДЫICМмЙЙЪЧвЛжжЛљгкааЮЊЃЈЯрЖдгкЛљгкФЃаЭЃЉЕФМмЙЙЃЌЩшМЦВЩгУВуМЖПижЦЃЌгЩгкДгЯТжСЩЯЕФФЃЪНдіМгСЫЙІФмИД
дгадЁЃЫќОЙ§ИФНјЃЌвдТњзуазїФмСІЕФвЊЧѓЁЃЭМ4ЫљЪОICМмЙЙАќКЌИажЊКЭЯьгІФЃПщЁЃИажЊФЃПщЭЈЙ§НгЪеДЋИаЦїЕФЪфШыЪ§ОнНЈСЂвЛИіЭтВПецЪЕЪРНчЕФБэЪОЁЃЯьгІФЃПщ
ЪЙгУИажЊФЃПщНЈСЂЕФецЪЕЪРНчЕФШЯжЊЩњГЩвЛИіЙцЛЎЃЌРДжДааЬиЖЈШЮЮёЁЃ
ЙВЗжЮЊШ§ИіВуМЖЃЌЖЅВуЮЊШЮЮёЙмРэВуЃЌЫќЯьгІжаМфВуааЮЊЃЈШчЙЅЛїЙцЛЎЪЕЪЉЃЉЕФПижЦЧыЧѓЁЃЕз ВуааЮЊВуЩњГЩЪфГіжИСюЃЈР§ШчИјздЖЏМнЪЛвЧЁЂДЋИаЦїЁЂЗЂЫЭаХЯЂЃЉЁЃжЛвЊВЛЗЂЩњГхЭЛЃЌПЩжДааЖрИіааЮЊЁЃLong
ЕШ9жИ ГіЃЌICМмЙЙЕФвЛаЉЙиМќЬиадАќРЈгІЖдвтЭтЧщПіЁЂздЖЏЪЕЪБЖЏЬЌЙцЛЎЁЂЬЌЪЦИажЊЁЂГЃМћЕФЖрЛњазїЬхЯЕНсЙЙЃЌвдМАСаШыаТЙІФмЕФСщЛюадКЭдкШЮКЮВуМЖПЩбЁЕФШЫЛњЛЅ
ЖЏЁЃВтЪдФЃаЭЪЧвЛИіЙЬЖЈвэЕФSIG Kadet Senior (змжи14lbs)ЃЌОпгаЮШЖЈЕФЗЩааЬиадКЭЛКТ§ЕФЗЩааЫйЖШЁЃ
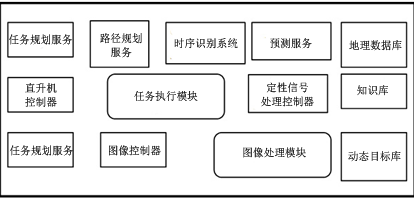
ЭМ4 ARL/PSU жЧФмПижЦЦїИпВуМмЙЙ(2008)5 ICМмЙЙЕФЩюШыЬжТлМћStover КЭKumarЕФЁАвЛжжгУгкЩшМЦзджїЯЕЭГжЧФмПижЦЦїЕФЛљгкааЮЊМмЙЙЁБ10ЁЃ
D. SheLion UAVЯЕЭГ
Cai, GЁЂChen,B.КЭLee, T.дкЁЖЮоШЫа§вэЯЕЭГЁЗ6Нщ ЩмСЫвЛжжааЮЊЪНЕФМмЙЙЃЌВЂгУгкЩшМЦЫћУЧЕФаЁаЭSheLion
UAVЃЌвВПЩЭЦЙугУгкИќДѓЕФUAVЁЃЫћУЧЕФШэМўЪЕЯжСЫвдЯТЙІФмЃЌШчгВМўЧ§ЖЏЁЂЪфШы/ЪфГіЁЂПижЦТЩЪЕЪЉЁЂЩшБИВйзїЙмРэЁЂЖрШЮЮёЕїЖШвдМАЪТМўЕїЖШЁЃЫћУЧГЦЪЙгУ
СЫвЛжжаТаЭШэМўЯЕЭГ/ааЮЊМмЙЙЃЌЮЊаТЕФФЃПщКЭПижЦЙІФмЬсЙЉСЫСщЛюадКЭПЩРЉеЙадЁЃЫћУЧжИГіДЫМмЙЙПЩвдЦеБщгІгУЕНЮоШЫЛњ,АќРЈЛњдиШэМўЯЕЭГКЭЕиУцПижЦеОЕФШэМў
ЯЕЭГЁЃ
ЛњЩЯШэМўЯЕЭГЪЙгУвЛИіЪЕЪБВйзїЯЕЭГ(RTOS),ЦфжаАќРЈвЛИіЗЩааПижЦКЭвЛИіЪгОѕДІРэФЃПщЃЌЛљгкКНЕчЯЕЭГЕФгВМўХфжУШчЭМ5ЫљЪОЁЃ
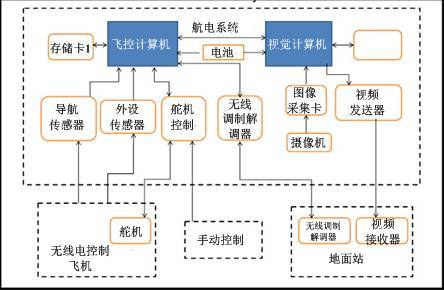
ЭМ5 SheLion UAVЯЕЭГЕФгВМўХфжУ (2011)6 ЗЩааПижЦФЃПщЪЙгУЖрЯпГЬПђМмЃЌгУгкВйзїЕМКНДЋИаЦїКЭЫХЗўзїЖЏЦїЁЂШежОМЧТМЗЩааЪ§ОнЁЂгыЕиУцеОЭЈаХвдМАЪЕЪЉздЖЏПижЦЫуЗЈЁЃздЖЏПижЦВЩгУЛљгкааЮЊЕФЬхЯЕНсЙЙ8ЁЃSheLionЗЩааПижЦЯЕЭГЕФПђМмШчЭМ6ЫљЪОЁЃ

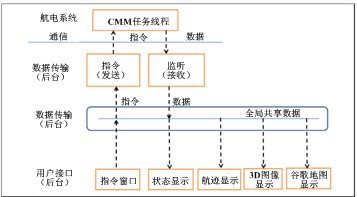
ЭМ6 SheLionЗЩааПижЦШэМўЯЕЭГПђМм(2011)6 вЛ ИіРрЫЦЕФПђМмгУгкАхдиЪгОѕМЦЫуЛњЕФЪЕЪБЭМЯёДІРэЁЃЭМ6ЗЩааПижЦЕФШэМўПђМмНЋУПИіЩшБИЛђШЮЮёЛГЩПђЭМаЮЪНЁЃNAVПщгыGPSИЈжњзЫЬЌКНЯђВЮПМЯЕЭГ
(AHRS)НјааНЛЛЅ,ЬсЙЉЗЩааВтСПЪ§ОнВЂЙРМЦЮоЗЈжБНгВтСПЕФЗЩаазДЬЌ(здЖЏПижЦЫљБиашЕФ)ЁЃCTLПщЪЕЪЉздЖЏЗЩааПижЦТЩЁЃЫќгЩNAVПщЫљЩњГЩЕФШЋОжЙВЯэ
Ъ§ОнЕУЕНЗЩаазДЬЌ,ИљОнЗЩаазДЬЌжДааПижЦЫуЗЈ,ВЂЩњГЩПижЦаХКХЧ§ЖЏЫХЗўжДааЛњЙЙЁЃШЮЮёЙмРэЪЙгУЖрЯпГЬМмЙЙ,дкетжжМмЙЙжа,УПИіЯпГЬЪЧвЛИіЕЅЖРЕФШЮЮёЁЃШЮЮё
ЕїЖШгЩMAINЯпГЬжДаа,гЩИпОЋЖШЖЈЪБЦї(ФЩУыОЋЖШ)ЗЂГівЛИіТіГхаХКХ,АДеедЄЖЈвхЕФЦЕТЪМЄЛюMAINЯпГЬЁЃИљОнЙІФмЕФИДдгадЃЌЗжХфИјУПИіЯпГЬвЛИіЪБМфЗЖЮЇ/ВлЁЃ
CaiЕШ16ЪЙ гУЛљгкааЮЊЕФЗЩааЕїЖШПщРДЧјЗжВЛЭЌЕФЗЩааФЃЪНЁЃЗЩааМЦЛЎПЩвдДцДЂдкЮоШЫжБЩ§ЛњЕФЗЩааЕїЖШПщРяЛђгЩЕиУцеОЩњГЩЁЃШЮКЮЮоШЫЛњжБЩ§ЛњЕФзївЕЖМБЛШЯЮЊЪЧДјгаЬиЖЈВЮ
Ъ§ЕФЬиЖЈааЮЊ(ШчПижЦаХКХКЭжДааЪБМфЯожЦ)ЁЃЗжВуПижЦЯЕЭГПщ(CTL)гУгкЪЖБ№ааЮЊКЭЪЕЪЉЯргІЕФздЖЏПижЦЫуЗЈ,Ч§ЖЏЫХЗўжДааЛњЙЙЁЃ
SheLionЕФЕиУцПижЦеОЪЧвЛИіМрПиКЭжИЛгЮоШЫжБЩ§ЛњЕФЮоЯпгУЛЇжеЖЫЁЃдкЗЩааВтЪджа,Ъ§ОнгЩАхдиЯЕЭГДЋЪфЕНЕиУцеОВЂЯдЪОЁЃSheLionЕиУцПижЦеОПђМмШчЭМ7ЫљЪОЁЃ
ЭМ7 SheLionЕиУцПижЦеОШэМўПђМм (2011)7
5 ЮДРДЮоШЫЛњ
ИљОн2010Фъ3дТЗЂВМЕФЁАаХЯЂЧыЧѓЁБЃЈRequest for Information ЃЌRFIЃЉЃЌУРЙњКЃОќЧыЧѓЖюЭтаХЯЂгУгквЛИіЮоШЫНЂдиЗЂЩфМрЪггыЙЅЛї(UCLASS)
UAVЃЌвдДЫзїЮЊХЕЫЙТоЦе?ИёТГТќ X-47BКЭЗЩТэзљ(Pegasus)UCAS-DЕФКѓајЁЃИКд№ЧщБЈгХЪЦ(N2/N6)ЕФИБКЃОќзїеНВПГЄЃЈThe
Deputy Chief of Naval OperationsЃЌDCNOЃЉвбУїШЗжИГіашвЊвЛжжКНФИНЂдиЛњЯЕЭГЃЌвдЬсЙЉГжајЕФЧщБЈЁЂМрЪгЁЂеьВщЃЈISRЃЉвдМАОЋШЗДђЛїФмСІЁЃКЃОќвВЖдКНФИНЂдизїеНЮоШЫЛњЯЕЭГФмЙЛгыгаШЫЛњМЏГЩвдМгШыКНФИКНПеСЊЖгЕФетвЛФмСІБэЪОГіаЫШЄЁЃ
6 НсТл
дк1940дчЦкЃЌУРЙњПеОќгУзїАаЛњКѓзїЮЊМрЪгЦНЬЈЕФвЃПиЮоШЫЛњВЂУЛгаШэМўМмЙЙЁЃ21ЪРМЭЮоШЫЛњЕФЯШЧ§епЃЌAQM-34L
гЉЛ№Гц(1964-1975)ЃЌзАБИгаЯШНјЕФММЪѕзАБИЃЌШчЕчзгРзДяИЩШХЦївдМАAN/ALE-38ВЬѕЭЖЗХЦїЃЌПЩвдФмЙЛЪЕЪБЕчЪгЭМЯёДЋЪфЁЃ
ЪРМЭжЎНЛЕФЮоШЫЛњЃЌЕУвцгкЮРаЧЭЈбЖФмСІвдМАМЦЫуЛњЫйЖШЁЂЫуЗЈЁЂЪЕЪБВйзїЯЕЭГЁЂЛњЕчЗЩааПижЦЁЂЪгОѕ/РзДяЯЕЭГЁЂЛ№ПиМЦЫуЛњЕШММЪѕЕФЗЂеЙЁЃвдЩЯЫљгаЕФЕквЛДњФмСІгАЯьСЫШэМўМмЙЙЕФЗЂеЙЁЃGeneral
AtomicsЕФВЖЪГепвдМАNorthrop Grumman ЕФRQ-4ШЋЧђгЅЪЧетвЛРрЮоШЫЛњЕФжївЊДњБэЁЃШЋЧђгЅЩшМЦЮЊЭъШЋГЬађПижЦЃЌРћгУGPSЪЕЯжДгЦ№ЗЩжСНЕТфЕФШЋГЬзджїзївЕЁЃЫћУЧЭЌЪБЩшМЦгаГЃЙцЕФЕиУцПижЦеОЁЃ
21ЪРМЭЕФЕкЖўДњЮоШЫЛњЕУвцгкЕквЛДњЕФММЪѕНјВНвдМАгааЇдиКЩЁЂФПБъЫјЖЈЁЂеьВьКЭЦфЫћШЮЮёФмСІЕФЯджјдіЧПЁЃЯрБШгкЙЬЖЈвэЗЩЛњЃЌЛ№СІеьВьБјзїЮЊвЛжжа§вэЮоШЫЛњЃЌЦфЗЩааПижЦИќЮЊИДдгЁЃЛ№СІеьВьБјКЭX-47BЩшМЦгУгкНЂУцзджїзївЕЃЌетЛђаэЪЧЖдШэМўМмЙЙЕФзюДѓЬєеНЁЃУРКЃОќЕФЮоШЫзїеНЗЩЛњ(UCAV)
Northrop GrummanЕФX-47BЗЩТэзљЕФЩшМЦгУЭОЮЊЁАГЄКНЪБЁЂИпЩњДцФмСІ,КЭгУгкзджїНЂЩЯЦ№НЕЕФЕЭЫйПеЦјЖЏСІЗЩааЦЗжЪЁБ2ЁЃ
УРЙњКЃОќЕФЙугђКЃЩЯМрЪг(BAMS) MQ-4CЪЧвЛжжЖргУЭОЮоШЫЛњЯЕЭГЃЌПЩгУгкЙЅЛїжЇдЎЁЂаХКХЧщБЈвдМАЭЈбЖжаМЬЁЃетЪЧвЛжжNorthrop
GrummanЕФRQ-4КЃОќИФНјаЭЃЌзАБИга360ЁуЖрЙІФмжїЖЏДЋИаЦїЃЈMulti-Function Active
SensorЃЌMFASЃЉЃЌетжжДЋИаЦїЪЧвЛжжжїЖЏЕчЩЈУшеѓСаРзДяЃЈactive electronically
scanned array ЃЌAESAЃЉЃЌвдМАКЃОќЬижЦЕФЕиУцеОЁЃ
БОЮФЫљбаОПЕФUAVВЩгУСЫвЛжжвдЯТМмЙЙЕФзщКЯЗНЪНЃЌШчЭМ1Garlan and Shaw1ЫљзмНсЕФШэМўМмЙЙЫљЪОЁЊЁЊПижЦЛиТЗЁЂВуМЖЁЂвўЪНЕїгУвдМАКкАхЁЃОпгаВуМЖНсЙЙЕФЛљгкааЮЊМмЙЙЃЈvs.ЛљгкФЃаЭЃЉМДЪЙВЛЪЧзюгХЕФUAVШэМўМмЙЙЃЌвВЪЧзюЮЊСїааЕФЁЃЪЙгУЪЕЪБЯЕЭГвдМАзджїПижЦЦїЪЧЕБЧАЕФМтЖЫПЦММЁЃSamadгыBalasдк2003ЪБдЄВтЕРЁАМЦЫузЪдДФПЧАзуЙЛжДааИДдгЕФзДЬЌКЭФЃаЭгХЛЏЃЈгУгкЗЩааЦїЕФЪЕЪБПьЫйЖЏЬЌЃЉЁБ3ЁЃDohertyЕШЪЙгУCORBA/client
server/distributed ЁАОпгаЖрИіНЛЛЅПижЦКЭЭЌВНЗЂЩњЗўЮёНјГЬЕФМмЙЙЁБ SinsleyЁЂLongЕШ5ЪЙгУARL/PSUжЧФмПижЦЦїПЊЗЂСЫвЛИізюНгНќгкШЫЙЄжЧФмШэМўЕФЗЩааПижЦЦїЃЌДЫПижЦЦїЪЙгУСЫЛљгкааЮЊЕФМмЙЙЁЃвЛжжаЮШчPaunickaЕШШЫ11ЕФЮоШЫЛњCORBA/ЗжВуМмЙЙвбОгІгУгкНЂдиF/A-18ЗЩЛњЃЌгІЕБвВЪЪКЯгкЮДРДЕФUCLASSзджїНЂЩЯЦ№НЕЁЃвдЩЯЮЊзд1940ФъДњЕФЮоЯпЕчЃЈЗЧШэМўЃЉПижЦжБжСзюНќЕФНјНјеЙЁЃ
УРЙњЙњЗРВПМЦЛЎдкЯТИіЪЎФъзмМЦдіМг45%ЕФUAVДЂБИ13ЃЌВЂЧвгавЛИіЮоШЫПижЦЯЕЭГЃЈUnmanned
Control SystemsЃЉЕФПижЦВПЗжЙЄзїаЁзщЃЈControl Segment Working
GroupЃЉРДНЈСЂвЛИіЮоШЫЛњЕиУцеОЕФЙВЭЌМмЙЙКЭПЊЗХБъзМ14ЁЃУРЙњКЃОќвбОЗЂВМвЛИіаХЯЂЧыЧѓЃЌашвЊдк21ЪРМЭ30ФъДњгУаТЕФЕкСљДњеНЖЗЛњРДШЁДњBoeing
F/A-18E/FГЌЛЦЗфКЭEA-18G ХиЯјепНЂдиЛњЃЌШЁДњепКмгаПЩФмЛсЪЧЮоШЫЛњЁЃ
|









